Изобретение относится к машиностроению и может быть использовано в качестве передачи для преобразования вращательного движения в поступательное.
Известна планетарная ролико-винтовая передача, основными деталями которой являются винт, винтовые ролики и цельная гайка (1, с. 314). Кроме того, ролики разделяются сепараторами, расположенными по торцам гайки, а между гайкой и роликами имеется дополнительная связь, предотвращающая ролики от вывинчивания. Эта связь осуществляется зацеплением зубьев, выполненных на роликах, с внутренними зубчатыми венцами гайки. Для обеспечения сборки на размеры основных деталей передачи даются такие допуски, что между этими деталями имеются зазоры. Данные зазоры приводят к снижению жесткости передачи и точности ее работы, особенно в рабочем осевом направлении.
Из известных технических решений наиболее близким по технической сущности к заявляемому устройству является планетарная ролико-винтовая пара (передача)[2] состоящая из тех же основных деталей, что и описанный выше аналог. Однако гайка в передаче-прототипе выполнена сборной и состоит из двух полугаек, между которыми установлен компенсатор. При этом совместная длина двух полугаек и компенсатора меньше, чем если бы гайка была целой. Поэтому при приложении усилия преднатяга, стягивающего две полугайки, винтовые ролики перемещаются к винту. Толщина компенсатора точно регулируется за счет последовательных сборок-разборок и подшлифовки компенсатора, в результате чего зазоры между основными деталями передачи выбираются и она становится существенно более жесткой и точной, чем передача-аналог.
Однако процесс регулировки долгий и трудоемкий; снижена нагрузочная способность передачи в месте контакта гайки с роликами за счет уменьшения рабочей высоты профиля; до приложения рабочей нагрузки ролики и обе полугайки нагружены осевым усилием преднатяга, совпадающим по направлению с рабочим усилием, т.е. при работе указанные усилия складываются; при приложении рабочей нагрузки в контакт с роликами вступает только одна полугайка; сборная гайка имеет меньшую осевую жесткость, чем цельная; усилие преднатяга снижается во времени из-за износа контактирующих поверхностей деталей передачи и релаксации напряжений в деталях механизма, осуществляющего преднатяг.
Задачей изобретения является повышение осевой жесткости и точности работы планетарной ролико-винтовой передачи, повышение нагрузочной способности, а также обеспечение автоматического регулирования во времени этих характеристик и упрощение конструкции передачи, и ее регулировки.
Задача достигается тем, что передача снабжена механизмом деформирования гайки в радиальном направлении, а гайка выполнена цельной в виде тонкостенной оболочки вращения с развитыми торцами, на которых выполнены выпуклые поверхности, предназначенные для взаимодействия с упомянутым механизмом, при этом указанные поверхности выступают не менее, чем на 1 мм, от торцов оболочки и расположены на наружной периферии развитых торцов.
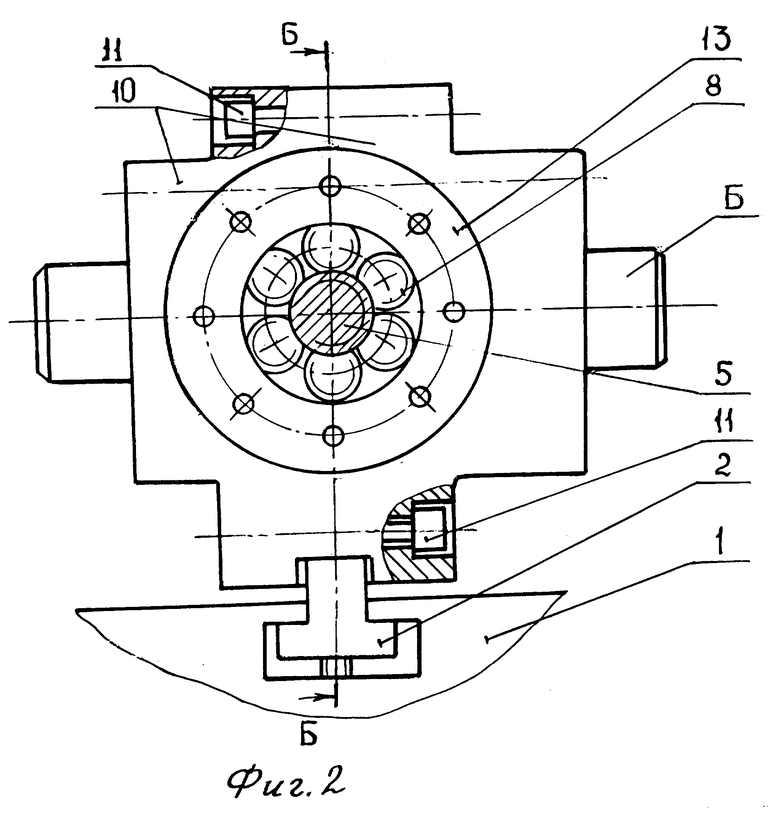
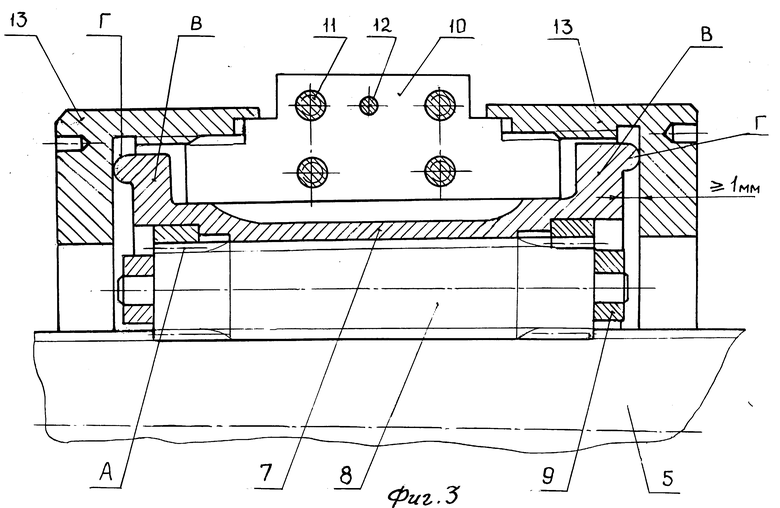
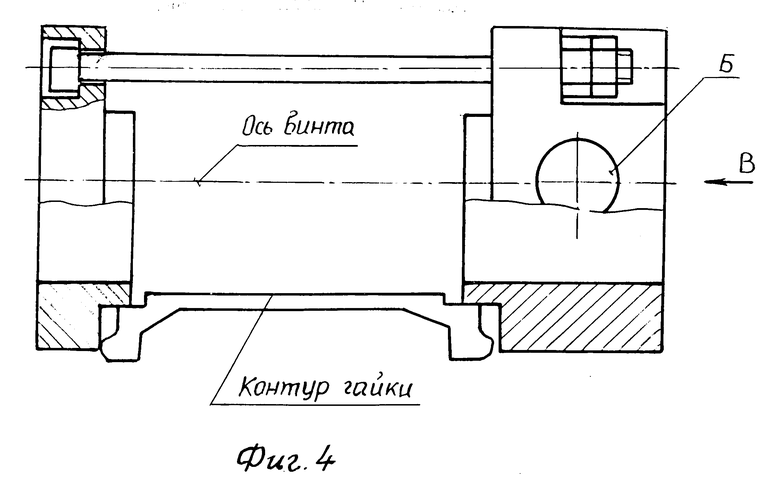
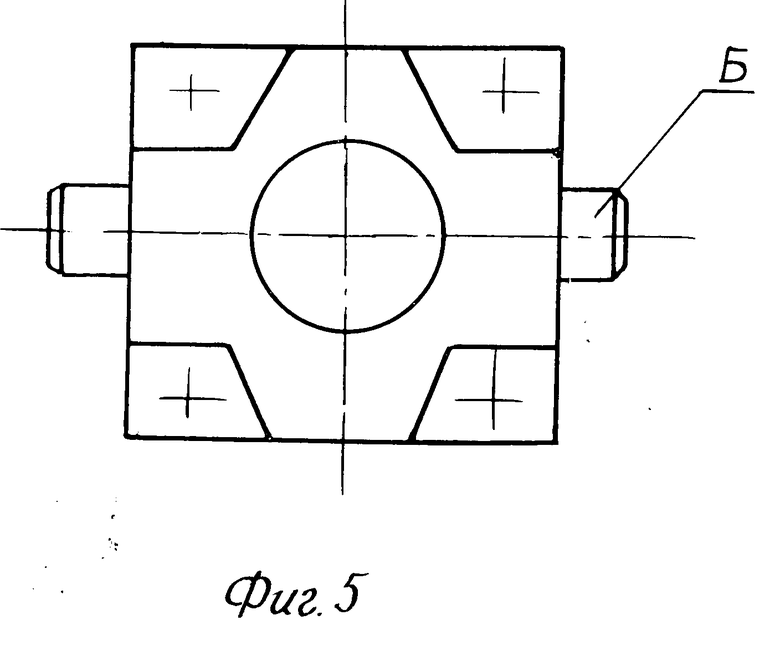
На фиг. 1 показан общий вид передачи; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 2; на фиг. 4 вариант исполнения механизма деформирования гайки в радиальном направлении; на фиг. 5 вид В на фиг. 4.
Основание 1 имеет направляющую 2 и опоры 3 и 4, в которых с возможностью поворота установлен винт 5. Со стороны одного торца винт 5 соединен с двигателем 6 (фиг. 1).
Между винтом 5 и гайкой 7 установлены резьбовые ролики 8, разделенные друг от друга сепараторами ( (фиг. 3). Ролики 8 имеют дополнительную связь в виде зубчатых зацеплений "А" с гайкой 7 для предотвращения вывинчивания роликов из гайки.
Механизм деформирования гайки 7 в радиальном направлении выполнен в виде двух полукорпусов 10, соединенных между собой винтами 11 и штифтами 12, и двух стяжных гаек 13. На полукорпусах 10 выполнены цапфы "Б", предназначенные для соединения с исполнительным механизмом (фиг. 1-3). Механизм деформирования гайки в радиальном направлении может иметь и другие исполнения, например (фиг. 4 и 5).
Гайка 7 выполнена в виде тонкостенной оболочки вращения с развитыми торцами "В", на наружной периферии которых выполнены выступающие поверхности "Г", предназначенные для взаимодействия с упомянутым механизмом (фиг. 3). Поверхности "Г" должны выступать относительно торцов "В" не менее, чем на 1 мм для того, чтобы при повороте от действия осевого усилия деформирования гайки торцы "В" не имели больше точек контакта со стяжными гайками 13.
Полукорпуса 10 с гайкой 7 могут перемещаться вдоль оси вала 5 по направляющей 2 основания 1 или это осевое перемещение может обеспечиваться конструкцией исполнительного механизма (не показан).
При сборке передачи стяжные гайки 13 создают осевое усилие деформирующее гайку в радиальном направлении. Для исполнения, показанного на фиг. 4 и 5, указанное усилие создается винтами.
Передача работает следующим образом. Цапфы "Б" полукорпусов 10 соединяются с исполнительным механизмом, например со столом металлорежущего станка. Во время работы станка при включении двигателя 6 винт 5 поворачивается на требуемый угол в опорах 3 и 4. При этом гайка 7, соединенная с направляющей 2 основания 1, совершает поступательное движение в осевом направлении вместе со столом станка. Перемещение стола станка соответствует углу поворота винта 5, а точность указанного перемещения зависит от наличия зазоров между деталями передачи и жесткости опор и деталей передачи.
Выборку радиальных зазоров между основными деталями передачи производят за счет деформирования гайки в радиальном направлении, для чего необходим силовой механизм.
Для возможности деформирования гайки она должна быть выполнена в виде оболочки. Под оболочкой, как известно, понимают тело, одно из измерений которого (толщина) значительно меньше двух других.
Для того чтобы ролики могли перекатываться по гайке в виде оболочки, ее деформация должна быть одинаковой для любого углового положения. А это значит, что гайка должна быть выполнена в виде оболочки вращения, для которой осесимметричная нагрузка дает осесимметричную деформацию.
Деформация оболочки должна быть такой по величине, чтобы за счет этой деформации гарантировано были выбраны все радиальные зазоры между гайкой и роликами, и винтом и роликами. А это значит, что оболочка должна быть тонкостенной.
Кроме того, существенные деформации возможно получить только за счет изгиба оболочки, так как радиальное сжатие, например, с помощью конусов, дает в десятки раз меньшие радиальные перемещения оболочки. Для создания изгибающего момента осевая сила должна иметь плечо относительно срединной поверхности оболочки. Для этого на оболочке выполняются развитые торцы, а на них на максимально возможном расстоянии от поверхности оболочки выполняются выпуклые поверхности, предназначенные для взаимодействия с рабочими поверхностями деталей механизма деформирования гайки в радиальном направлении.
Так как торцы оболочки при приложении осевой нагрузки поворачиваются на некоторый угол, то выполняемые на торцах поверхности должны быть выпуклыми и выступать относительно самих торцов на величину, которая гарантирует, что из-за разворота торцы не будут иметь еще одного места контакта с деталями упомянутого механизма. В противном случае вторая точка контакта будет препятствовать деформированию оболочки. Из расчетов следует, что величина, на которую указанные выпуклые поверхности должны выступать относительно торцов оболочки, менее 1 мм, т.е. с учетом запаса эта величина должна быть не менее 1 мм.
Использование заявляемой планетарной ролико-винтовой передачи позволяет получить следующие преимущества по сравнению с прототипом:
а) повысить нагрузочную способность и осевую жесткость передачи за счет:
восприятия рабочей нагрузки витками всей гайки;
отсутствия первоначальной осевой силы преднатяга;
контакта витков гайки с витками роликов по максимально возможной рабочей высоте профиля;
отсутствия в предлагаемой конструкции стыков между компенсатором и двумя полугайками, а также податливости соединительных элементов;
более равномерного распределения рабочей осевой нагрузки между роликами из-за радиальной податливости гайки;
более равномерного распределения нагрузки между витками ролика. Из-за особенности деформации гайки ее крайние витки первоначально менее нагружены, а со стороны винта на ролик действуют усилия, которые смещены относительно осевой плоскости, следствием чего является появление момента, пытающегося развернуть ролик относительно указанной плоскости. В предлагаемой конструкции ролик имеет большую возможность такого разворота, следствием чего является более равномерное распределение нагрузки по виткам ролика;
б) упростить конструкцию передачи, так как гайка выполняется цельной и не нужны компенсатор и дополнительные детали для ориентации двух полугаек;
в) упростить сборку и регулировку передачи, так как исключаются операции по подшлифовке компенсатора и соответствующая разборка-сборка гайки;
г) гайка предлагаемой конструкции, аккумулируя энергию деформации, мало чувствительна к увеличению первоначальных зазоров между основными деталями передачи из-за их износа;
д) за счет использования упругой гайки предлагаемая передача хорошо демпфирует колебания нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНАЯ РОЛИКОВИНТОВАЯ ПЕРЕДАЧА | 1996 |
|
RU2104425C1 |
| ПЛАНЕТАРНАЯ РОЛИКО-ВИНТОВАЯ ПЕРЕДАЧА | 2001 |
|
RU2194202C2 |
| ПЛАНЕТАРНАЯ РОЛИКОВИНТОВАЯ ПЕРЕДАЧА С МОДИФИЦИРОВАННОЙ РЕЗЬБОЙ ЕЕ ДЕТАЛЕЙ | 2002 |
|
RU2204069C1 |
| УЗЕЛ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ПЛАНЕТАРНОЙ РОЛИКОВИНТОВОЙ ПЕРЕДАЧИ | 1998 |
|
RU2140592C1 |
| ПЛАНЕТАРНАЯ РОЛИКОВИНТОВАЯ ПЕРЕДАЧА | 2002 |
|
RU2204070C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2009 |
|
RU2392517C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ МЕХАНИЧЕСКИХ ПЕРЕДАЧ, ПРЕОБРАЗУЮЩИХ ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВИНТА В ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ГАЙКИ | 1997 |
|
RU2116640C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2006 |
|
RU2310785C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ (ВАРИАНТЫ) | 2008 |
|
RU2374527C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2004 |
|
RU2272199C1 |
Использование: машиностроение. Сущность изобретения: планетарная ролико-винтовая передача содержит винт, ролики и гайку, между которыми выбираются зазоры за счет деформирования гайки в радиальном направлении. Гайка выполняется цельной в виде тонкостенной оболочки вращения с развитыми торцами, на которых выполнены выступающие поверхности, предназначенные для взаимодействия с механизмом деформирования гайки. Указанные поверхности должны выступать относительно торцов оболочки на величину не менее, чем 1 мм, для того чтобы за счет поворота торцов последние не соприкасались с деталями упомянутого механизма и не препятствовали при этом деформированию оболочки. 5 ил.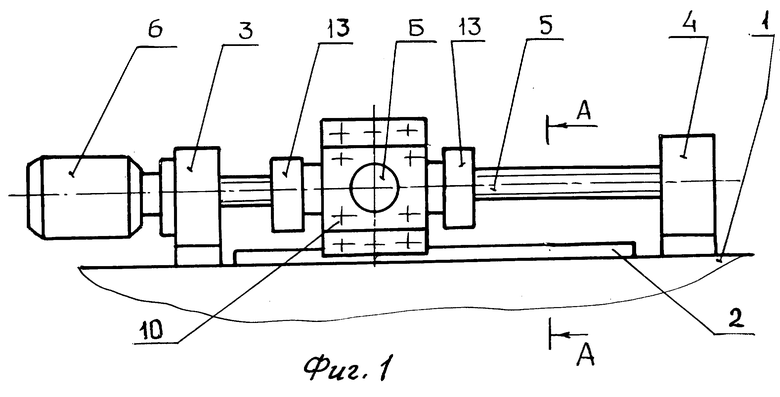
Планетарная роликовинтовая передача, содержащая установленный в опорах основания с возможностью поворота винт, гайку и зацепляющиеся с ними резьбовые ролики, разделенные сепараторами и дополнительно связанные с гайкой, отличающаяся тем, что передача снабжена механизмом деформирования гайки в радиальном направлении, а гайка выполнена цельной в виде тонкостенной оболочки вращения с развитыми торцами, на которых выполнены выступающие поверхности, предназначенные для взаимодействия с упомянутым механизмом, при этом указанные поверхности выступают не менее чем на 1 мм от торцов оболочки и расположены на наружной периферии развитых торцов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Решетов Д.Н | |||
| Детали машин | |||
| - М.: Машиностроение, 1989, с.314, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Роликовинтовая пара | |||
| Рекламный проспект Автоваза | |||
| Тольятти, тип ВАЗа, 1989. | |||
