Изобретение относится к машиностроению. Известен конусный шаровой вариатор с ручным управлением положения шаров [1] в котором движение от ведущего диска к ведомому передается посредством шариков, расположенных между дисками. Шарики заключены в сепараторы, составленные из дополнительных дисков, в одном из которых имеются прямолинейные радиальные пазы, в другом пазы, очерченные по винтовой линии. Недостатком такого вариатора является то, что передаточное отношение изменяется вручную, а не автоматически с изменением момента на ведомом валу.
Наиболее близким техническим решением к предложенному является саморегулирующийся автоматический фрикционный вариатор [2] в котором передаточное отношение изменяется автоматически. Вариатор содержит ведущее и ведомое звенья, нажимное устройство, ролики, взаимодействующие с ведущим звеном и плоской опорной поверхностью корпуса, ведомое звено включает плоскую пружину, выполняющую функцию водила, связанную концами с роликами, ведущее звено представляет собой чашу с криволинейной вогнутой поверхностью, а радиус роликов выбран меньше радиуса кривизны криволинейной вогнутой поверхности в каждой ее точке. Вариатор может быть выполнен и по схеме, когда ролики взаимодействуют с ведущим звеном и с ведомым звеном в виде диска, связанного с ведомым валом, а пружина, на которой закреплены ролики, фиксируется от возможного поворота относительно оси вариатора.
Недостатком такого автоматического фрикционного вариатора является задержка исполнения управляющего действия по автоизменению передаточного отношения из-за инерционности всех звеньев кинематической цепи вариатора, поскольку выработка управляющего действия происходит на ведущем звене. Вторым недостатком автоматического фрикционного вариатора являются сравнительно большие потери на трение скольжения, имеющее место при автоизменении передаточного отношения, когда происходит скольжение роликов по поверхности ведущего и ведомого звеньев, либо по поверхности ведущего звена и опорной поверхности корпуса в планетарной схеме.
Задачей изобретения является повышение быстродействия автоматического фрикционного вариатора и снижение потерь полезной мощности на трение скольжения роликов.
Поставленная задача может быть решена за счет того, что тела качения размещены в гнездах сепаратора, связанного с ведомым валом гибкими звеньями, один конец которых жестко закреплен на ведомом валу, а второй конец на соответствующем гнезде тела качения, при этом гнезда тел качения в сепараторе соединены упругими элементами.
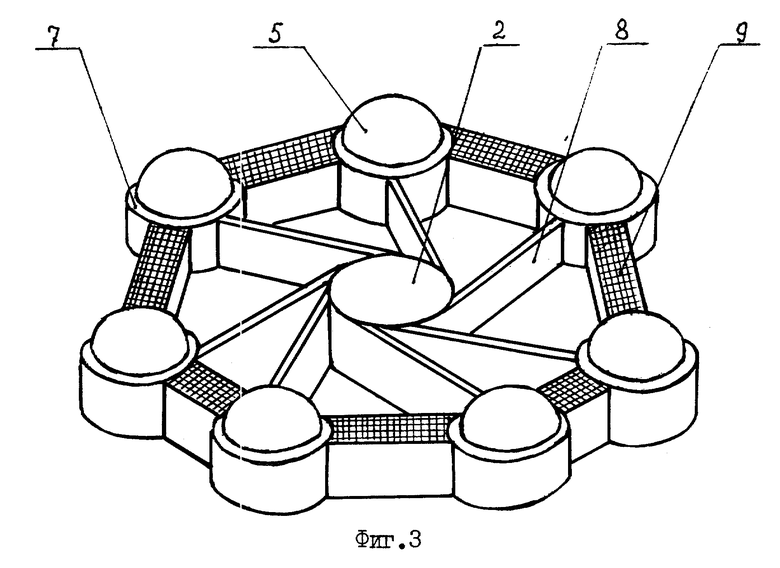
На фиг. 1 показан общий вид вариатора в разрезе; на фиг. 2 общий вид вариатора в разрезе, в котором поверхность ведущего звена и опорная поверхность корпуса выполнены в виде конусов; на фиг. 3 конструкция упругого сепаратора в аксонометрии с гибкими звеньями, выполненными в виде плоских пружин; на фиг. 4 конструкция упругого сепаратора в аксонометрии с гибкими звеньями, выполненными в виде тросов.
Автоматический фрикционный вариатор содержит ведущее 1 и ведомое 2 звенья, связанные соответственно с ведущим 3 и ведомым 4 валами, и тела качения 5, взаимодействующие с рабочей поверхностью ведущего звена 1 и опорной поверхностью корпуса 6. Тела качения 5 размещены в гнездах 7 упругого сепаратора, гнезда 7 в свою очередь связаны с ведомым валом 4 посредством гибких звеньев и, один конец которых жестко закреплен на ведомом валу, а второй конец на соответствующем гнезде 7 тела качения 5. Количество гибких звеньев равно количеству тел качения в другом сепараторе. Гнезда тел качения в сепараторе соединены по окружности упругими элементами 9. Кроме того, вариатор снабжен нажимными устройствами 10, установленными между ведущим валом и ведущим звеном.
Тела качения могут быть снабжены осями вращения 11, размещенными в пазах гнезд упругого сепаратора, причем в случае выполнения вариатора с плоской опорной поверхностью корпуса наличие таких осей необходимо для устранения возможного холостого вращения шаров.
Опорная поверхность корпуса 6 может быть выполнена плоской (фиг. 1), эквидистантой к рабочей поверхности ведущего звена (фиг. 2).
Гибкие звенья 8 могут быть выполнены в виде плоских пружин (фиг. 3), один конец которых плоской поверхностью жестко закреплен на ведомом валу по его образующей, а второй конец на соответствующем гнезде тела качения. В этом случае ведомому валу придается возможность движения в осевом направлении. Гибкие звенья могут быть выполнены в виде тросов (фиг.4). В этом случае ведомому валу не требуется придавать возможности дополнительного движения в осевом направлении, компенсацию от осевого движения сепаратора выполнит деформация троса. Рабочая поверхность ведущего звена 1 и эквидистантная ей опорная поверхность корпуса 6 могут быть конической, сферической или иной формы.
Тела качения выполнены в виде шаров. Упругие элементы 3 сепаратора могут быть выполнены в виде пружин или вставок из эластомерного материала, например, резины,
Устройство работает следующим образом.
При увеличении нагрузки на ведомом валу 4 гибкие звенья и изгибаются, как бы наматываясь на ведомое звено, и за счет этой деформации тела качения 5 приближаются к общей оси вариатора, передаточное отношение при этом увеличивается и у вариатора с плоской опорной поверхностью корпуса подчиняется зависимости: U1,н= 1+Rsinα/R-rcosα а у вариатора с опорной поверхностью корпуса эквидистантой рабочей поверхности ведущего звена: U1,н= w1/wн= 1+(R+rcosα)/(R-rcosα) при этом момент на выходном валу автоматически увеличивается до потребной величины, а потребляемая мощность сохраняется.
Эволюция геометрии упругого сепаратора происходит при сохранении чистого качения в контактах тел качения 5 с рабочей поверхностью ведущего звена и опорной поверхностью корпуса, минимизируя потери на трение. Запаздывание срабатывания, т.е. быстродействие вариатора, определяется только инертностью тел качения. Благодаря этому такие недостатки прототипа, как малое быстродействие и повышенные потери полезной мощности на трение скольжения роликов, могут быть устранены в предлагаемом автоматическом фрикционном вариаторе.
Нажимное устройство 10 обеспечивает регулировку нормальных сил в контактах тел качения и с ведущим звеном 1 и опорной поверхностью 6, тем самым удается оптимизировать механический КПД вариатора.
При снятии нагрузки на ведомом валу 4 геометрические размеры упругого сепаратора восстанавливаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ КЛИНОРЕМЕННЫЙ ВАРИАТОР | 1996 |
|
RU2122670C1 |
| АВТОМАТИЧЕСКИЙ ФРИКЦИОННЫЙ ВАРИАТОР | 1996 |
|
RU2120070C1 |
| АВТОМАТИЧЕСКИЙ ФРИКЦИОННЫЙ ВАРИАТОР | 2003 |
|
RU2242652C2 |
| ВОЛНОВОЙ ФРИКЦИОННЫЙ ВАРИАТОР | 1995 |
|
RU2098698C1 |
| ШКИВ | 1996 |
|
RU2127841C1 |
| ЦЕНТРОБЕЖНОЕ НАЖИМНОЕ УСТРОЙСТВО | 2003 |
|
RU2258851C2 |
| ГЕНЕРАТОР ВОЛНОВОЙ ФРИКЦИОННОЙ ПЕРЕДАЧИ | 1995 |
|
RU2115853C1 |
| АВТОМАТИЧЕСКИЙ ФРИКЦИОННЫЙ ВАРИАТОР | 1991 |
|
RU2023917C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| ФРИКЦИОННЫЙ ВАРИАТОР | 2002 |
|
RU2222735C1 |


Использование: машиностроение. Сущность изобретения: автоматический фрикционный вариатор содержит корпус с опорной поверхностью ведущий и ведомый валы, соответственно связанные с ведущими и ведомыми звеньями промежуточные тела качения, нажимное устройство, сепаратор для размещения в его гнездах тел качения. Промежуточные тела введены во взаимодействие с ведущим и ведомым звеньями и опорной поверхностью корпуса. Нажимное устройство установлено между ведущим валом и ведущим звеном. Сепаратор связан с ведомым валом гибкими звеньями, один конец которых жестко закреплен на ведомом валу, второй конец - на соответствующем гнезде тела-качения. Гнезда тел качения в сепараторе соединены упругими элементами. 5 з.п. ф-лы, 4 ил.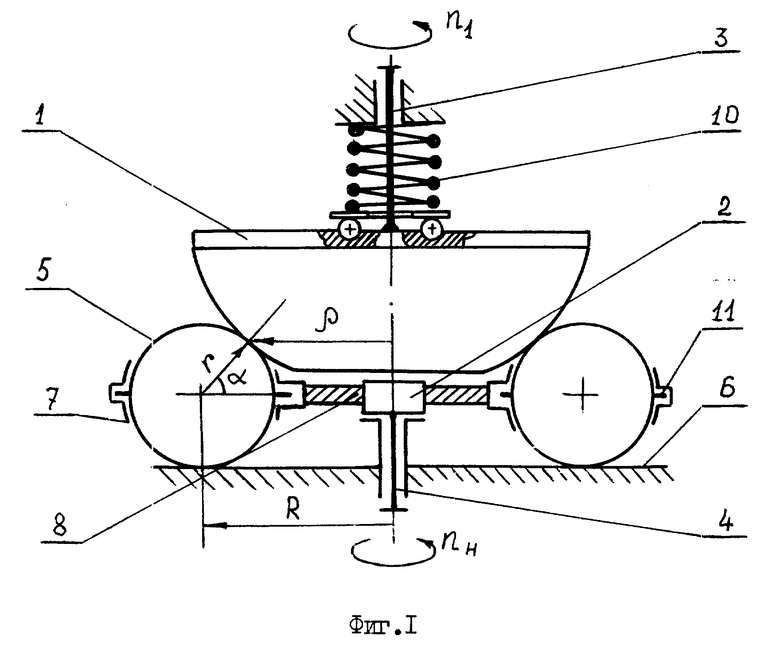
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| Справочник | |||
| - М.: Машиностроение, 1976, с.339, рис.5.31 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU, патент, 2023917, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
