Изобретение касается машины объемного действия, в которой поршни, совершающие рыскающее движение, образуют между собой камеру переменного объема.
Из французской заявки FR-A-2651019 известна машина объемного действия, содержащая четыре звена, связанных между собой таким образом, что они образуют деформируемый (меняющий форму) параллелограмм.
Каждое из этих звеньев имеет одну выпуклую цилиндрическую поверхность и одну вогнутую цилиндрическую поверхность, центр каждой из которых лежит на одной из осей шарнирного соединения и поворота звена, при этом каждая из этих поверхностей взаимодействует с вогнутой цилиндрической поверхностью одного из смежных звеньев и соответственно с выпуклой цилиндрической поверхностью другого смежного звена, образуя с ними герметичный контакт.
Одна из осей шарнирного соединения параллелограмма неподвижна, а противоположная ей ось совершает круговое движение.
Это вызывает одновременно изменение углов при вершине параллелограмма и колебание (поворот) параллелограмма вокруг его неподвижной оси.
Изменения углов параллелограмма влечет за собой изменение объема камеры, образующейся между четырьмя выпуклыми цилиндрическими поверхностями. Колебание вокруг неподвижной оси позволяет этой камере выборочно сообщаться с отверстием впуска и с выпускным отверстием.
Таким образом, образуется тепловой двигатель четырехтактного действия (впуск, сжатие, расширение, выпуск).
Недостатком этой машины является то, что она довольно громоздка для данного рабочего объема и не позволяет получить высокий коэффициент объемного сжатия.
Выполнение каждого звена требует достаточно высокой точности, чтобы достичь высококачественной герметичности и избежать при этом разрушающего механического трения.
Задачей изобретения является устранение указанных недостатков.
Задачей изобретения является также машина объемного действия, содержащая между двумя плоскопараллельными противолежащими поверхностями два первых противоположных звена, поворотных, перпендикулярных указанным поверхностям и расположенных в четырех вершинах параллелограмма, каждая сторона которого образует продольную ось соответственно одного из первых и вторых звеньев, несущих четыре выпуклые цилиндрические стенки, образующие между собой камеру переменного объема, причем продольная ось каждого первого звена пересекается с осями двух соответствующих выпуклых цилиндрических стенок, две линии, образующие оси вторых звеньев при этом пересекаются каждая с осями соответствующих им двух выпуклых цилиндрических стенок. Машина содержит, кроме того, средства координации, связанные с двумя из звеньев двумя осями координации, при этом средства координации представляют собой систему с кривошипом, связанным с приводным валом и с одним из этих двух звеньев, которые совместно заставляют параллелограмм совершать колебательное движение между плоскими поверхностями, при котором его углы меняются и соответственно изменениям углов меняется объем камеры, в указанной плоской поверхности выполнены золотниковые отверстия для выборочного сообщения камеры с отверстием впуска или с отверстием выпуска в зависимости от углового положения кривошипа.
Согласно изобретению машина отличается тем, что каждое первое звено несет жестко закрепленные на нем обе выпуклые цилиндрические стенки, оси которых пересекаются с продольной осью этого первого звена, каждая выпуклая цилиндрическая стенка образует с выпуклой цилиндрической стенкой, пересекающей ту же линию, пару цилиндрических стенок, принадлежащих разным первым звеньям, каждое первое звено содержит замыкающие средства, обеспечивающие между своими двумя выпуклыми цилиндрическими стенками непрерывность (оплошность) стенок камеры переменного объема, машина содержит динамические средства герметизации между выпуклыми цилиндрическими стенками одной пары.
Главной задачей вторых звеньев является поддержание расстояния между центрами выпуклых цилиндрических стенок одной и той же пары постоянным.
Другими словами, все происходит так, как если бы деформируемый параллелограмм связывал четыре оси четырех выпуклых цилиндрических стенок.
Таким образом, расстояние между выпуклыми цилиндрическими стенками одной и той же пары всегда одинаковое какова бы ни была конфигурация деформируемого параллелограмма.
Это позволяет предусмотреть динамическое герметизирующие средства между выпуклыми цилиндрическими стенками одной пары несмотря на то, что они подвижны друг относительно друга. Выпуклые цилиндрические стенки, принадлежащие разным парам и смежные друг с другом по периметру параллелограмма, неподвижны друг относительно друга, так как они жестко связаны с одним и тем же звеном, и поэтому между ними легко выполнить герметичное соединение с помощью средств герметичного замыкания, которые могут быть статичными.
Таким образом, между четырьмя выпуклыми цилиндрическими стенками образуется камера, по существу герметично замкнутая по периметру, объем которой изменяется в зависимости от конфигурации параллелограмма.
Предпочтительно машина согласно изобретению выполнена так, чтобы функционировать как четырехтактный тепловой двигатель, в частности средства возбуждения горения, расположенные так, чтобы сообщаться с камерой по меньшей мере тогда, когда эта последняя находится в первом положении, при котором ее объем минимален.
Машина согласно изобретению выполняет, как в существующем уровне техники, четыре такта за один оборот кривошипа.
Однако она имеет меньшие габариты и по периметру камеры имеются только две зоны динамической герметизации: между выпуклыми цилиндрическими стенками одной пары.
Кроме того, эти герметизирующие средства могут быть сведены к простому контакту по касательной между выпуклыми цилиндрическими стенками, что является исключительно простым решением и очень надежным даже при очень высоких скоростях.
В частности, такой тип тесного взаимодействия представляет малую опасность эаклинивания. Кроме того, относительная скорость между выпуклыми цилиндрическими стенками одной и той же пары очень мала по сравнению с данной скоростью вращения кривошипа.
Можно также выбрать вариант, когда между выпуклыми цилиндрическими стенками одной пары размещают герметизирующий элемент, например плавающую перемычку двояковогнутой общей формы или герметизирующую деталь, крепящуюся к второму звену и шарнирно связанную с первыми звеньями по двум осям шарнирных соединений (поворота), соответствующим осям цилиндрических стенок соответствующей пары
На фиг. 1 приведен вид элементарной машины согласно изобретению по плоскости 1-1 на фиг. 3; на фиг. 2 частичный разрез по II-II на фиг. 1; на фиг. 3 вид машины в разрезе по III-III на фиг. 1; на фиг. 4, 5 и 7 виды, аналогичные фиг. 1 но представляют машину в трех последовательных стадиях ее работы; на фиг. 6 схематичный вид, иллюстрирующий одно из положений камеры, при котором она имеет наибольший объем;
на фиг. 8 и 9 виды, относящиеся к фиг. 5 и 1 соответственно, но с различным регулированием коэффициента сжатия;
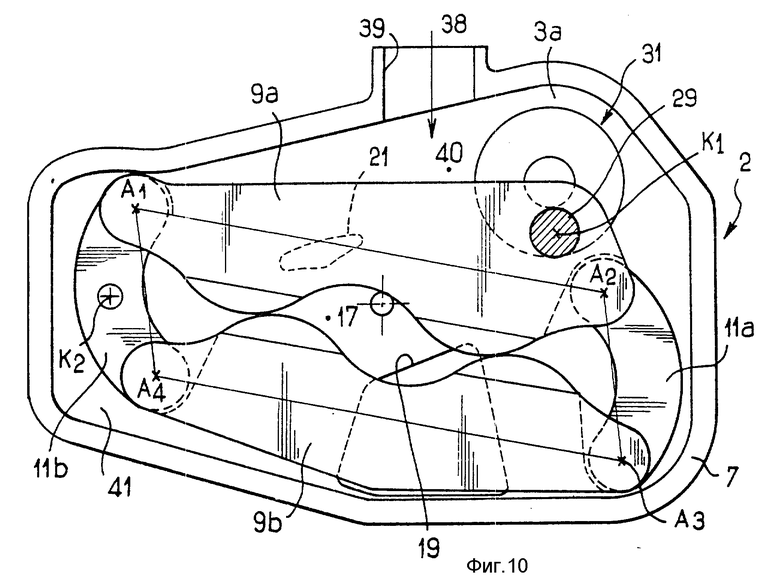
на фиг. 10 вид, аналогичный фиг. 4, но представляющий вариант осуществления изобретения;
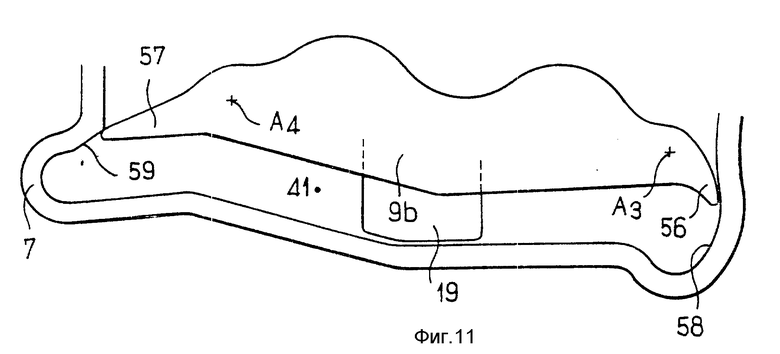
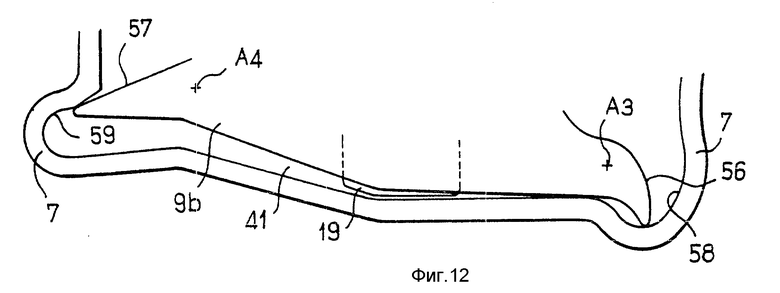
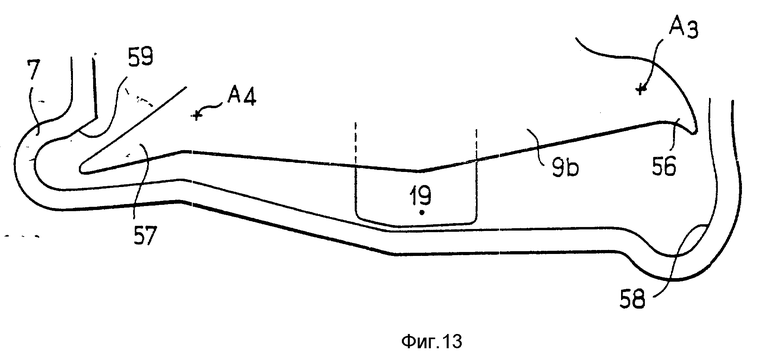
на фиг. 11-13 виды, аналогичные нижним участкам фиг. 1, 10 и 5 соответственно, но относящиеся к второму варианту осуществления изобретения; на фиг. 14 вид внутренней стороны головки 14 блока элементарных машин объемного сжатия-расширения согласно третьему варианту осуществления изобретения; на фиг. 15 вид в частичном разрезе машины по линии XV-XV на фиг. 14; на фиг. 16 вид, аналогичный фиг. 4, но относящийся к четвертому варианту осуществления изобретения; на фиг. 17 и 18 два схематичных вида пятого варианта осуществления изобретения в положении максимального объема и соответственно в положении минимального объема; на фиг. 19 вид в перспективе герметизирующей детали для машины по фиг. 17 и 18; на фиг. 20 схематичный вид четырех звеньев по шестому варианту выполнения изобретения; на фиг. 21 - вид, аналогичный фиг. 5, но относящийся к другому способу осуществления изобретения; на фиг. 22 деталь фиг. 21 в увеличенном масштабе; на фиг. 23 - вид в перспективе с разрывом первого звена по фиг. 21 и некоторых деталей, которые этот элемент несут, разрезами и вырывами; на фиг. 24 вид в разрезе по XXIV-XXIV на фиг. 21; на фиг. 25 частичный вид другого варианта выполнения первого звена; на фиг. 26 вид первого звена в разрезе по линиям XXVIa-XXVIa вверху фигуры и XXVIb-XXVIb внизу фигуры.
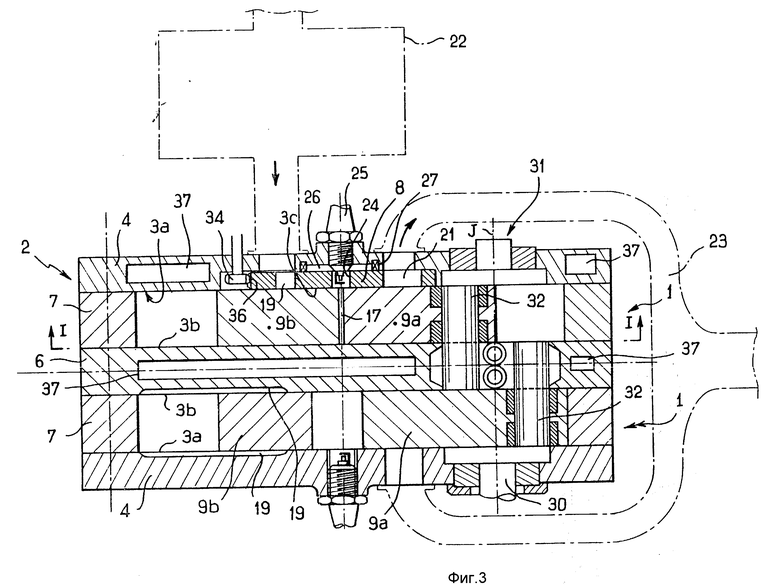
В реальном выполнении машина может состоять из одной единственной элементарной машины или из нескольких элементарных машин, например из двух элементарных машин 1, как это представлено на фиг. 3, где нижняя элементарная машина соответствует варианту осуществления изобретения, который будет описан в дальнейшем.
Как показано в верхней части фиг. 3, машина содержит картер 2, образующий для каждой элементарной машины две плоские и параллельные поверхности 3a и 3b, расположенные друг напротив друга. Плоские поверхности 3а по меньшей мере частично образованы двумя противолежащими головками 4 блока элементарных машин, являющихся частями картера 2, и две поверхности 3b образованы двумя противоположными сторонами промежуточной перегородки 6, размешенной между двумя поверхностями 3a и 3b на одинаковом расстоянии от них. Расстояние между каждой головкой блока 4 и промежуточной перегородкой 6 определяется соответствующей периферийной стенкой 7.
Часть 3с плоской стороны 3a элементарной машины, показанной в верхней части фиг. 3, образует поворотную головку 8 в виде пластины, поворотно установленной в соответствующей выемке, выполненной в соответствующей головке 4 блока элементарных машин с целью, которая будет раскрыта ниже.
Головки 4 блока элементарных машин, промежуточная перегородка 6 и периферийные стенки 7 образуют вместе корпус машины. Поворотная головка 8 подвижна по отношению к этому корпусу, но как элемент, ограничивающий внутренний объем машины, считается частью картера 2.
Как показано на фиг. 1, каждая элементарная машина 1 содержит между плоскими поверхностями 3a и 3b два первых противоположных звена 9a и 9b и два вторых противоположных друг другу звена IIa и IIb.
Каждое звено 9a и 9b шарнирно связано с двумя вторыми звеньями IIa и IIb с помощью двух отдельных осей шарнира. Таким образом имеется четыре отдельных оси шарниров A1, A2, A3, A4, которые все параллельны между собой и перпендикулярны плоским поверхностям 3a и 3b.
Эти четыре оси A1, A2, A3, A4 расположены в четырех вершинах параллелограмма. Продольная ось каждого звена 9a, 9b, IIa, IIb образует сторону параллелограмма соответственно Da, Db, Ea, Eb, которая соединяет две оси шарнирных соединений (поворота) соответствующего звена, например оси A1 и A2 для первого звена 9a, имеющего продольную ось Da.
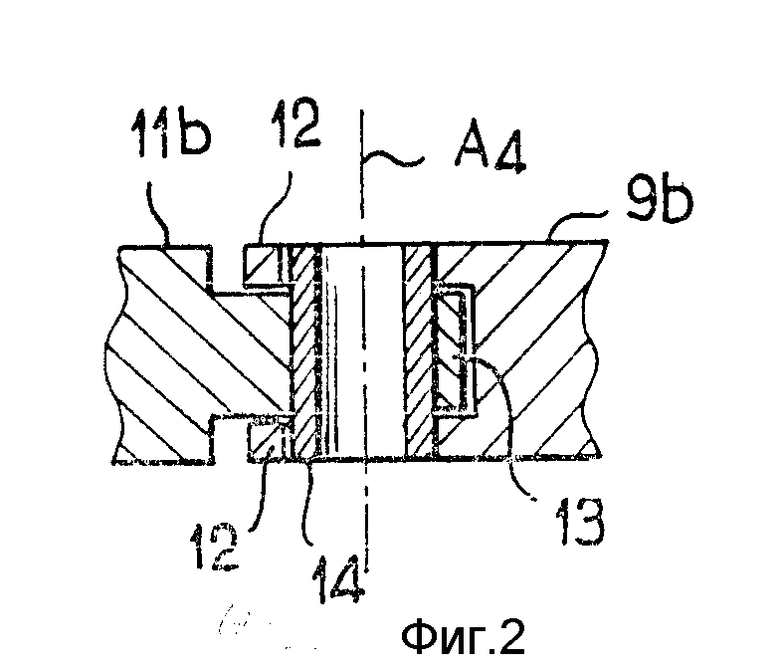
На фиг. 2 представлена конструкция шарнира с осью A4 между звеньями 9b и IIb. Конец первого звена 9b выполнен с двумя параллельными проушинами 12, образующими серьгу, между которыми вставлена единственная проушина 13 второго звена IIb. Через две проушины 12 и проушину 13 продета полая ось 14, образуя шарнирное соединение.
Каждое первое звено 9a и 9b несет со своей стороны, обращенной к другому первому звену, две выпуклые цилиндрические стенки S1, S2 и соответственно S3, S4, образованные накладками 16.
Ось C1, C2, C3 и C4 каждой цилиндрической стенки S1, S2, S3 или S4 пересекает продольную ось Da или Db первого звена 9a или 9b, с которым жестко соединена эта цилиндрическая стенка.
Кроме того, каждая цилиндрическая стенка S1.S4 образует с цилиндрической стенкой другого первого звена пару цилиндрических стенок, оси которых пересекаются с одной и той же линией L14 или L23, параллельной продольным осям Ea и Eb вторых звеньев IIa и IIb.
Таким образом, цилиндрические стенки S1 и S4 образуют вместе пару, оси C1 и C4 которой пересекаются с одной и той же линией L14, параллельную осям Ea и Eb, и также стенки S2 и S3 образуют пару, оси которой C2 и С3 пересекаются с одной и той же линией L23, параллельной продольным осям Ea и Eb.
Мы видим, таким образом, что оси C1, C2,C3, C4 находятся в четырех вершинах второго параллелограмма, оси C1, C2, C3, C4 которого постоянно совмещены с продольными осями Da и Db первых звеньев 9a и 9b, а стороны C1-C4 и C2-C3 которого (линии L14 и L23) всегда параллельны осям Ea и Eb.
В приведенном примере оси C1 и C2 располагаются между осями A1 и A2 соответствующего первого звена 9a, а оси C3 и C4 расположены между осями A3 и A4 соответствующего первого звена 9b.
Это выгодное практическое расположение, при котором все цилиндрические стенки S1.S4 находятся между вторыми звеньями IIa и IIb.
В показанном примере каждое второе звено IIa, IIb имеет криволинейную форму, вогнутую со стороны, обращенной внутрь параллелограмма, в частности в положении, представленном на фигуре S2, так что он может охватывать контур цилиндрической стенки S1 или соответственно S3, которая находится при этом ближе.
Таким образом уменьшаются габариты. Это верно также для стенок S2 и S4 в другом крайнем положении, представленном на фиг. 5.
Четыре звена 9a, 9b, IIa, IIb подвижны друг относительно друга, двигаются от крайнего положения, представленного на фиг. 1, занимая различные взаимные положения, некоторые из которых представлены на фиг. 4, 5, 6 (схематично) и фиг. 7.
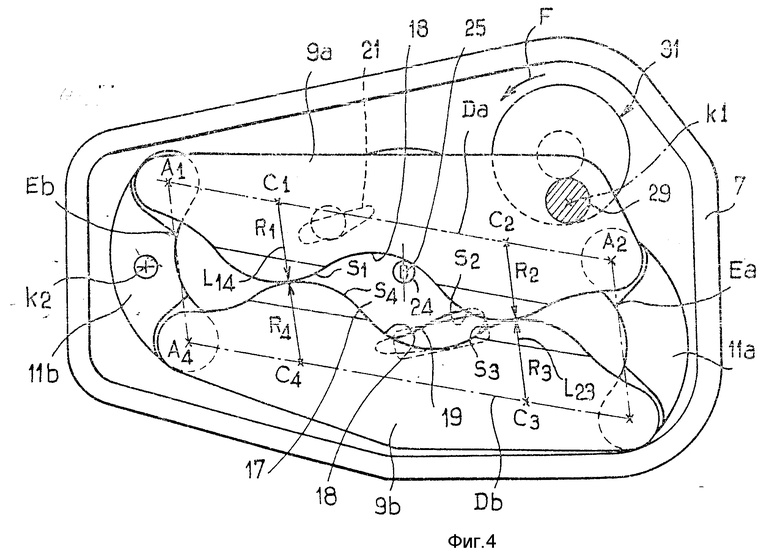
В положении, представленном на фиг. 4, между двумя первыми звеньями 9a и 9b образована камера 17. Камера 17 ограничена частью каждой цилиндрической стенки S1. S4, обращенной внутрь параллелограмма C1, C2, C3, C4, а также средствами, замыкающими камеру, образованными двумя вогнутыми цилиндрическими поверхностями 18, жестко крепящимися (каждая) на одном из первых звеньев 9a и 9b, каждый из которых соединяет две выпуклые цилиндрические стенки S1 и S2, или соответственно S3 и S4, указанного первого звена.
Каждая вогнутая цилиндрическая поверхность 18 является дополнительной по отношению к каждой из выпуклых цилиндрических стенок другого первого звена.
Таким образом, в положении, представленном на фиг. 1, цилиндрическая стенка S2 первого звена 9a входит в вогнутую поверхность 18 первого звена 9b, а цилиндрическая стенка S4 первого звена 9b входит в вогнутую поверхность 18 первого звена 9a, что приводит объем камеры по существу к нулевому значению.
Положение, показанное на фиг. 1, соответствует концу выпуска или началу впуска. Уменьшение до нуля объема камеры на этой стадии цикла позволяет полностью удалять из нее выхлопные газы и идеально отделить последние от газов, которые будут впущены в камеру в следующем рабочем цикле.
Возвратимся к фиг. 4: камера 17 закрывается, кроме того, динамическими средствами герметизации, эти средства динамической герметизации заключаются в подборе размеров: радиусы R1, R2, R3, R4 выпуклых цилиндрических стенок S1. S4 выбираются такими, чтобы сумма радиусов цилиндрических стенок одной пары равнялась расстоянию между осями цилиндрических поверхностей этой же пары.
В описываемом примере радиусы R1.R4 равны между собой и равны половине расстояния между осями C1 и C4 или между осями C2 и C3.
Так цилиндрические стенки одной и той же пары S1 и S4 или S2 и S3 постоянно находятся в состоянии касания по касательной, что обеспечивает по существу герметичное замыкание камеры 17.
Кроме того, камера 17 закрывается плоскими или параллельными поверхностями 3a и 3b (фиг. 3) за исключением некоторых положений (фиг. 4 и 6), при которых камера 17 сообщается с выпускным отверстием 19 (фиг.4) или выпускным отверстием 21 (фиг. 6). Впускное 19 и выпускное 21 отверстия выполнены в поворотной головке 8. Через них камера 17 сообщается поочередно с впуском 22, например с карбюратором, и соответственно с выпуском 23.
Поворотная головка 8 содержит центральное отверстие 24, в которое выступают электроды свечи зажигания 25, ввинченной в головку блока элементарных машин 4.
Кроме того, центральное отверстие 24 заставляет сообщаться камеру 17 с камерой противодавления 26, выполненной между задней поверхностью поворотной головки 8 и головкой блока элементарных машин 4. Уплотнение 27 ограничивает по периферии камеру противодавления 26 и отделяют ее от впускного 19 и выпускного 21 отверстий, направленных радиально наружу. Периметр головки 8 огибает полностью камеру 17 при всех положениях четырех звеньев 9a и 9b.
Таким образом, зазор вокруг поворотной головки 8 никогда не может стать линией утечки из камеры 17. Давление в камере 17, а именно в стадии, когда оно высокое, создаваемое в камере противодавления 26, противодавление, прижимающее поворотную головку 8 к первым звеньям 9a, 9b, отжимает их к плоской поверхности 3b.
Таким образом обеспечивается достаточный герметизирующий контакт между звеньями 9a, 9b и каждой из плоских поверхностей 3a, 3b вокруг камеры 17 какова бы ни была ее конфигурация.
Чтобы противодавление в камере 26 обеспечивало силу прижима большую, чем давление в камере 17, достаточно, чтобы площадь, ограниченная уплотнением 27 вокруг отверстия 24, была больше, чем самая большая площадь, которую может занимать камера, когда она находится под давлением, т. е. главным образом во время тактов сжатия и расширения.
Как уже указывалось, положение, представленное на фиг. 1, является положением минимального объема, соответствующего концу выпуска и началу впуска.
В положении, представленном на фиг. 4, камера 17 увеличивается в объеме, заходя за отверстие впуска 19. Вследствие этого камера всасывает свежий газ.
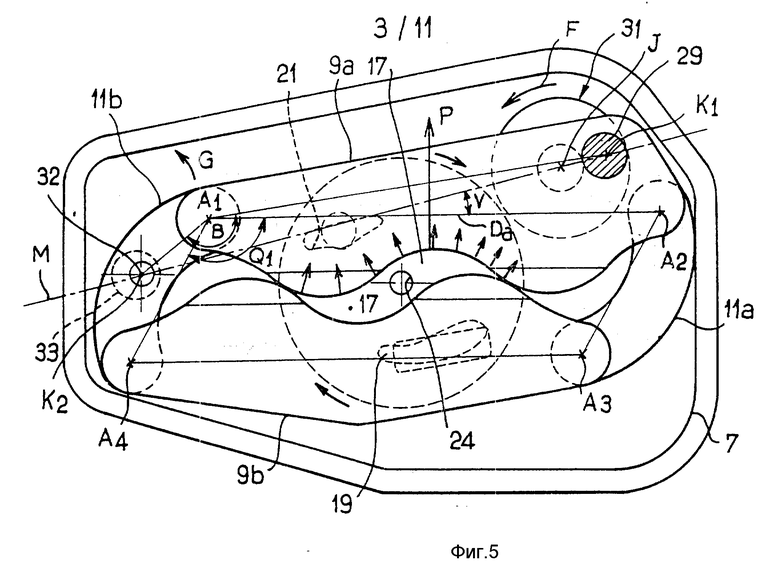
Положение, представленное на фиг. 5, соответствующее окончанию сжатия и началу горения, также является положением минимального объема, при котором камера 17 изолирована от впускного отверстия 19 и от выпускного отверстия 21 и сообщается с центральным отверстием 24, в котором находятся электроды свечи зажигания.
Мы видим, что при этом положении минимального объема углы Q1 и Q3 параллелограмма при осях A1 и A3, которые в положении, соответствовавшем концу выпуска (фиг. 1), были острыми, стали тупыми в положении начала горения (фиг. 5), и наоборот, углы Q2 и Q4 при осях A2 и A4 стали острыми.
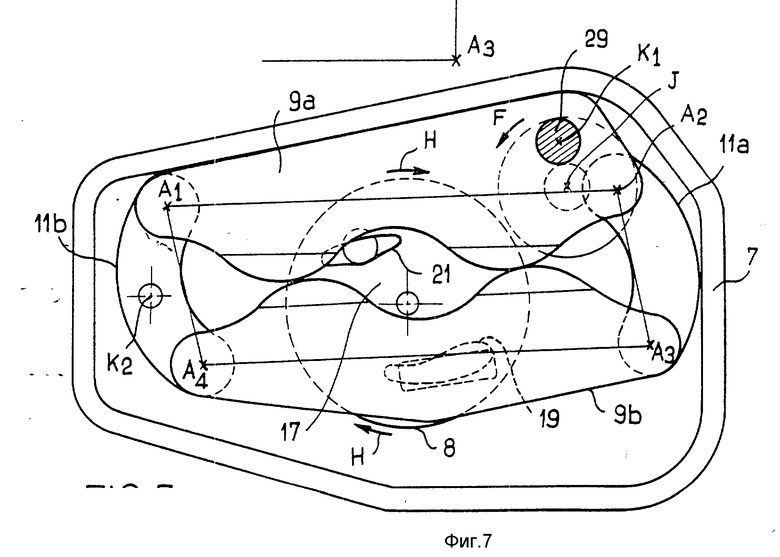
Затем камера 17 снова увеличивается в объеме (фиг. 6) для выполнения рабочего такта или такта расширения газа и начинает сообщаться с отверстием выпуска 21, она сообщается с этим отверстием до тех пор, пока ее объем снова не станет минимальным, как показано на фиг.1.
Положения, показанные на фиг. 4 (впуск) и 6 (выпуск), соответствуют по существу одинаковому взаимному расположению четырех звеньев 9a, 9b, IIa, IIb.
Тот факт, что камера 17 сообщается с впускным отверстием 19 в положении, показанном на фиг. 4, и с выпускным отверстием 21, как показано на фиг. 6, связан с тем, что совокупность четырех звеньев 9a, 9b, IIa, IIb занимает не то же самое место в пространстве, ограниченном внутренними поверхностями периферийной стенки 7.
Взаимные перемещения звеньев 9a, 9b, IIa, IIb друг относительно друга, а также движения всего образуемого ими узла внутри пространства, ограниченного периферийной стенкой 7, управляются средствами координации, которые меняют положение некоторой первой оси координации K1, жестко связанной с первым звеном 9a, по отношению к второй оси координации K2, жестко связанной с вторым звеном IIb.
Вторая ось координации K2 является осью связи и поворота 28, связывающей звено IIb с корпусом машины. Координационная ось K2 расположена на одинаковом расстоянии от осей шарниров A1 и A4, с которыми связано второе звено IIb, и вне параллелограмма A1, A2, A3, A4.
Ось координации K1 является осью шарнирного соединения звена 9a с эксцентрично установленной цапфой 29 кривошипа 31, установленного с возможностью поворота на оси J относительно корпуса машины. Ось координации K1 находится вблизи оси шарнира A2, с помощью которой первое звено 9a шарнирно связано с вторым звеном IIa, не тем, с которым связана координационная ось K2. Координационные оси K1 и K2 перпендикулярны поверхностям 3a и 3b, следовательно, параллельны другим осям A1.A4, C1.C4.
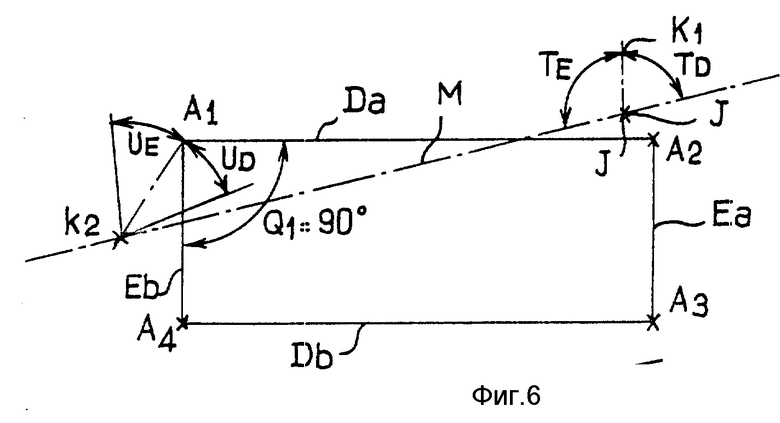
Рассмотрим линию М (фиг. 1), проходящую через ось J вращения кривошипа 31 и ось координации K2. Оба положения, при которых объем камеры 17 минимален и которые соответствуют крайним значениям углов параллелограмма, получаются, когда первая координационная ось K1 располагается на линии M, между осями K2 и J, как показано на фиг. 1, или за осью J, как показано на фиг. 5.
Действительно, именно в этом положении расстояние между осями K1 и K2 наименьшее или наибольшее, вследствие чего угол Q1 также становится минимальным или максимальным.
Радиус вращения координационной оси K1, т. е. расстояние между осями J и K1 меньше, чем расстояние между осями координации K2 и осью шарнира A1, связывающей два звена 9a и IIb, связанных с осями координации K1 и K2.
Таким образом, вращение кривошипа 21 приводит в возвратно-угловое движение второе звено IIb относительно вращающейся связи (оси вращения) 28.
Кривошип выполнен таким образом, что положение оси K1 при первом положении минимального объема (фиг. 5), соответствующем началу горения, таково, что объем камеры 17 в этом положении является не нулевым, а соответствует коэффициенту сжатия, который хотят установить для данной машины, а положение оси координации K1 при втором положении минимального объема или положении окончания выпуска ( см. фиг. 1) таково, что объем камеры 17 в этом положении равен нулю.
При некоторых заданных положении оси координации K2, ориентации прямой линии М, проходящей через ось координации K2, и положении оси K1 на первом звене 9a, два вышеуказанных условия определяют оба положения оси K1 на прямой M, при которых выполняются оба положения минимального объема камеры 17 и, следовательно, определят положение оси J на прямой M, на половине расстояния между двумя положениями оси K1.
Ни при одном из положений минимального объема (фиг. 1 и 5) ось шарнира A1, связывающего два звена 9a и IIb, связанных со средствами координации 28, 31, не располагается на прямой M.
Таким образом, в этих положениях направление поворота второго звена IIb вокруг оси координации K2 меняется так, как это необходимо. Если бы оси A1 и K1 оказались вместе на прямой M, появилась бы неопределенность смены направления поворота второго звена IIb из этого положения.
Однако в первом положении минимального объема (фиг. 5), соответствующем началу горения, ось A1 незначительно удалена от прямой M. Угол B между прямыми, соединяющими ось A1 с осью K2 и ось A1 с осью K1, близок по величине к 180o.
Кроме того, направления F и G вращения кривошипа 21 и соответственно звена IIb из этого положения минимального объема одинаковы.
При таких условиях относительно малое угловое перемещение кривошипа 31 вызывает достаточно значительное угловое перемещение второго звена IIb, превышающее величину, соответствующую отношению радиусов вращения осей K1 и A1.
Более того, так как обе оси K1 и K2 находятся вне параллелограмма, угол B гораздо больше соответствующего угла Q1, близкого 120o в данном примере.
Таким образом, величина углового перемещения (угловой ход), которое должно совершить звено IIb для того, чтобы параллелограмм перешел от первого положения минимального объема (фиг. 5) к последующему положению максимального объема (фиг. 6), при котором параллелограмм становится прямоугольником, приблизительно равна 30o, т. е. относительно мала.
Таким образом, сразу благодаря двум факторам достаточно относительно короткого углового хода кривошипа 31, чтобы звено IIb совершило вокруг оси K2 поворот приблизительно на 30o, которого достаточно, чтобы параллелограмм A1, A2, A3, A4 стал прямоугольником и чтобы камера 17 достигла своего максимального объема.
В представленном примере кривошипу 31 достаточно совершить поворот ТД (фиг. 6), равный приблизительно 75o, чтобы элементы 9a, 9b, IIa, IIb переместились от первого положения минимального объема (фиг.5) в последующее положение максимального объема, при котором параллелограмм A1, A2, A3, A4 представляет собой прямоугольник.
Можно видеть также, что в положении, показанном на фиг. 7, соответствующем повороту кривошипа 31 на 90o относительно первого положения минимального объема, прямоугольная конфигурация параллелограмма A1, A2, A3, A4 явно пройдена, т. е. угол Q1 уже уменьшился до величины, приблизительно равной 75o.
Это является преимуществом, так как расширение газа может произойти очень быстро при данной скорости вращения кривошипа, а это (изменение параллелограмма) минимизирует время, в течение которого тепло отводится через металлические стенки, и минимизирует, следовательно, теплопотери.
Амплитуда колебательного движения элемента IIb между двумя положениями минимального объема камеры 17, представленными на фиг. 1 и 5, составляет приблизительно всего 90o.
Это достигается благодаря тому, что радиус вращения оси шарнира A1 вокруг второй координационной оси K2 выполнен достаточно большим по отношению к радиусу вращения координационной оси K1 вокруг оси J кривошипа 31.
На фиг. 6 представлено положение, при котором объем камеры максимален, соответствующее окончанию расширения. На фиг. 6 показан угол TD, на который повернулась координационная ось K1 из первого положения минимального объема (начало горения), и угол TE, равный приблизительно 105o, который еще остается пройти до второго положения минимального объема, так же, как и углы UD и UE, на которые должна поворачиваться ось шарнира A1 вокруг координационной оси K2.
Благодаря выбранной геометрии оба угла TD и TE, очень отличающиеся друг от друга, обеспечивают поворот оси A1 на почти равные углы UD и UE.
В первом положении минимального объема (фиг. 5) в результате давления газа на звено 9a на цапфу 29 кривошипа 31 действует результирующая сила P, направленная по существу по касательной к круговой траектории оси K1 цапфы 29 и в направлении вращения кривошипа 31.
Эта результирующая, следовательно, очень эффективна для передачи вращающего момента на кривошип 31, не вызывающего паразитных усилий в механизме.
Это происходит благодаря малой величине угла V между продольной осью DA элемента 9a, к которой результирующая P почти перпендикулярна, и прямой M, соответствующей в этом положении направлению плеча рычага, образованного кривошипом 31.
Другой причиной благоприятного воздействия усилия, создаваемого газом, является правильный выбор направления вращения кривошипа 31.
Если бы направление вращения кривошипа 31 было бы избрано обратным направлению F, работа механизма тоже была бы возможной, так как, начиная с положения, показанного на фиг. 5, объем камеры 17 также начинал бы увеличиваться, чтобы придти к положению, показанному на фиг. 4. Но передача усилия на кривошип производилась бы в значительной степени косвенным образом через первое звено 9b и второе звено IIb, работающее как рычаг-инвестор, тянущий звено 9a влево на фиг. 5.
Как показано на фиг. 3, кривошип 31 связан с выходным валом 30, с которым может быть связан, как обычно, инерционный маховик и устройство передачи с многократным усилием для образования движительного агрегата для автомобиля.
Так же, как обычно, инерционный маховик и/или инерционная нагрузка, которой служит автомобиль, сообщают кривошипу 31 энергию, необходимую для поддержания функционирования в фазах, поглощающих энергию (при впуске, сжатии, расширении).
Кривошип 31 содержит две расположенные с эксцентриситетом цапфы 32, по одной для каждой элементарной машины 1, смещенные друг относительно друга на 180o по отношению к оси J, для устранения составляющих сил инерции каждой элементарной машины 1.
Наилучшее их устранение имеет место, если обе элементарные машины 1 полностью смещены друг относительно друга на 180o по отношению к оси J, так чтобы все движения в каждой элементарной машине 1 были симметричны движениям в другой элементарной машине 1 относительно оси (без учета осевого смещения одной машины относительно другой по оси J).
Машина, показанная на фиг. 1-6, содержит средства регулировки, позволяющие оптимизировать ее работу. В частности, вращающаяся связь 28 содержит цапфу 32 (фиг.1), вокруг которой вращается второе звено 11b и которая установлена на эксцентрике 33, установленном в корпусе с возможностью вращения.
Когда, как показано на фигуре 1, эксцентрик 33 повернут так, что цапфа 32 расположена ближе всего к оси J кривошипа 31, угол B, а следовательно и угол Q1, имеет наименьшую возможную в положении минимального объема камеры 17 (фиг. 5) величину.
Поэтому объем камеры 17 в первом положении минимального объема имеет наибольшую возможную величину, что соответствует минимальному коэффициенту сжатия для машины, так как максимальный объем камеры 17, определяемый прямоугольной конфигурацией параллелограмма A1, A2, A3, A4 (фиг. 6), не зависит от положения цапфы 32.
Во втором положении минимального объема (фиг.1) это положение цапфы 32 соответствует еще меньшему возможному углу Q1 и, следовательно, еще меньшей возможной величине наименьшего объема камеры 1, т. е. нулю в данном примере.
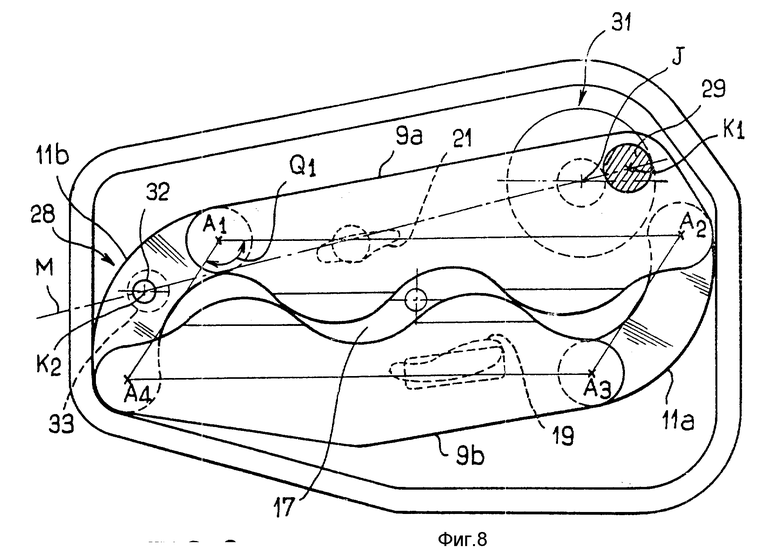
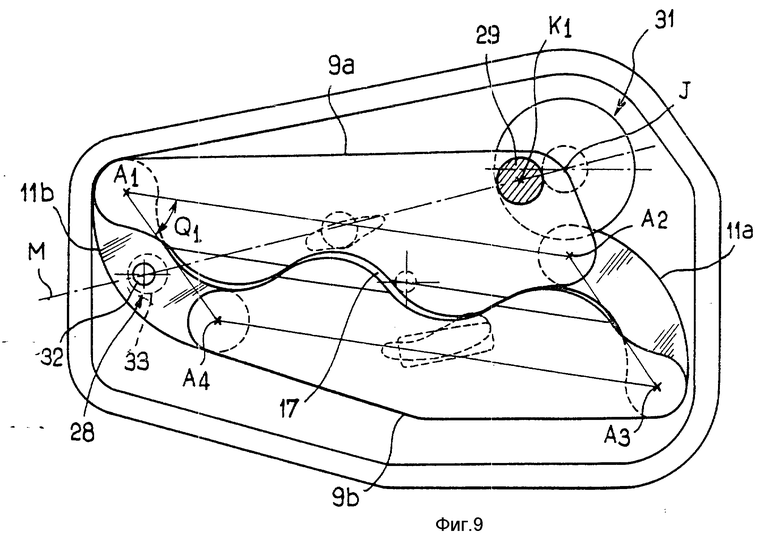
Если, как показано на фиг. 8 и 9, эксцентрик 33 повернут на 180o, цапфа 32 оказывается наиболее удаленной от оси J кривошипа 31, а угол Q1 в первом (фиг.8) и во втором (фиг.9) положениях минимального объема увеличивается.
Это соответствует уменьшению объема камеры 17 в первом положении минимального объема и, следовательно, увеличению коэффициента сжатия машины или увеличению объема камеры 17 во втором положении минимального объема (фиг.8).
Это увеличение, относительно небольшое, может рассматриваться как недостаток, так как оно вызывает появление неактивного объема, из которого невозможно удалить газы механическим путем.
Регулировка поворота эксцентрика 33, имеющая целью регулирование коэффициента сжатия машины, может осуществляться вручную даже в процессе работы машины (на ходу) или автоматически.
Например, эксцентрик 33 может быть связан с измерителем разрежения во впуске 22 для увеличения коэффициента сжатия в случае, когда это разрежение велико (низкое абсолютное давление), и для уменьшения коэффициента сжатия, когда абсолютное давление в канале впуска 22 увеличивается. Такое автоматическое регулирование особенно выгодно в случае двигателя с наддувом.
Как известно, выгодно изменять положение золотниковой системы теплового двигателя в зависимости от его рабочих параметров, в частности от скорости вращения и от нагрузки.
Изобретение позволяет это осуществлять путем поворота поворотной головки 8 вокруг оси центрального отверстия 24. В примере, проиллюстрированном схематично, этот поворот осуществляется с помощью шестерни 34, находящейся в зацеплении с зубчатым участком 36, предусмотренным на части периферии поворотной головки 8 (фиг. 3).
На фиг.7 видно, что, если из представленного на ней положения повернуть поворотную головку 8 в направлении, указанном стрелкой H, выпускное отверстие 21 будет открываться раньше при перемещении элемента 9a, и благодаря этому камера 17 раньше начнет сообщаться с выпуском.
Это качество обычно требуется при увеличении скорости вращения двигателя. При таком угловом смещении впускное отверстие 19 тоже перемещается в положение, при котором оно начинает сообщаться с камерой 17 немного раньше, чем кончится такт выпуска, что тоже требуется при высоких скоростях, а именно, если, как показано на фиг. 9, объем камеры 17 во втором положении минимального объема не равен нулю, получают эффект вытеснения газов, получаемых в результате сгорания, газом свежепоступившим в камеру через впускное отверстие.
Управление угловым положением поворотной головки 8 может быть ручным или, напротив, автоматическим в зависимости от скорости вращения кривошипа 31 и от давления в системе впуска 22. Точные величины регулировки по этим двум параметрам могут быть определены специалистом с помощью его обычных знаний.
Однако следует заметить, что учитывая большие проходные сечения, по которым проходит газ, которые позволяет использовать изобретение, опережение открытия отверстий и запаздывание их закрытия не так велики, как в двигателях с обычными поршнями и цилиндрами.
Здесь не описываются более подробно средства охлаждения двигателя, содержащие, например, различные полости 37 (фиг.3) в промежуточной перегородке 6 и в головках блока элементарных машин 4, и средства смазки шарнирных соединений.
На фиг.10 и в нижней части фиг. 3 показан упрощенный вариант, способный функционировать без системы смазок благодаря подаче смеси масло-бензин-воздух 38 через впускной патрубок 39 в зоне 40 периферийного пространства, находящегося между элементами 9a, 9b, IIa, IIb и внутренней стороной периферийной стенки 7 картера 2. Впускное отверстие 19 представляет собой несквозную выемку, выполненную в поверхности 3a, через которую камера 17 выборочно сообщается во время такта впуска с другой зоной 41 указанного периферийного пространства.
Кроме того, внутренняя сторона периферийной стенки 7 профилирована таким образом, что она оказывается в квази-контакте (почти касается) со звеньями 9a.Ib, с одной стороны, вблизи оси шарнира A1, описывающей круговую траекторию вокруг координационной оси K2, а с другой стороны вблизи диаметрально противоположной ей оси A3, на некоторой части траектории этой последней.
Когда объем камеры 17 возрастает в течение такта выпуска, эти два квази-контакта, образующие герметизирующий барьер, разделяют одну от другой зоны 40 и 41 периферийного пространства, и объем зоны 41 убывает, в результате чего происходит сжатие впущенного газа и вытеснение его к камере 17 через отверстие 19.
При этом осуществляется форсированный впуск или даже наддув камеры 17. Изменение объема зоны 41 можно оценить, сравнив фиг. 1 (начало впуска) и 10 (впуск в процессе осуществления).
На фиг. 5 и 7 видно, что во время сжатия и расширения зона 41 снова увеличивается в объеме и ось A3 отчетливо удаляется от внутренней поверхности периферийной степени 7, что позволяет зоне 41 вновь засосать газ из зоны 40.
Согласно варианту, представленному на фиг. 10 и на нижней части фиг. 3, воздушно-бензино-масляная смесь омывает весь механизм, находящийся в картере 2, что обеспечивает смазку без применения отдельной специальной системы смазки.
В примере, проиллюстрированном фиг. 11-13, который описывается здесь только в части его отличия от примера по фиг. 10, первое звено 9b, противоположное тому, которое связано со средствами координации (кривошип 31), несет две жестко связанные с ним лопасти 56, 57, каждая из которых близка к одной из шарнирных осей A3, A4, с которыми связано это первое звено.
На внутренней стороне периферийной стенки 7 имеется два паза 58 и 59, профиль которых соответствует огибающей крайних положений лопастей 56 и 57 во время такта впуска (на фиг. 11 показано начало впуска, на фиг. 12 окончание впуска).
Кроме того, во время впускного такта объем зоны 41 периферийного пространства картера, располагающейся между двумя лопастями, убывает очень сильно. Уменьшение ее объема может составить примерно 650 см3 для двигателя, камера 27 которого имеет максимальный объем 400 см3. Таким образом, звено 9b образует с периферийной стенкой 7 картера механический компрессор наддува двигателя.
Затем во время такта расширения газа лопасти 56 и 57 отходят от стенок пазов 58 и 59, что позволяет зоне 41 вновь всосать газ 38, поступающий через патрубок 39 (как показано на фиг. 10).
При желании можно изменить направление вращения кривошипа 31 на противоположное, но тогда придется выполнить лопасти на звене 9a, чтобы получить зону, объем которой убывает при впуске.
Однако это менее выгодный вариант, потому что в этом случае придется герметизировать подшипниковые опоры кривошипа 31.
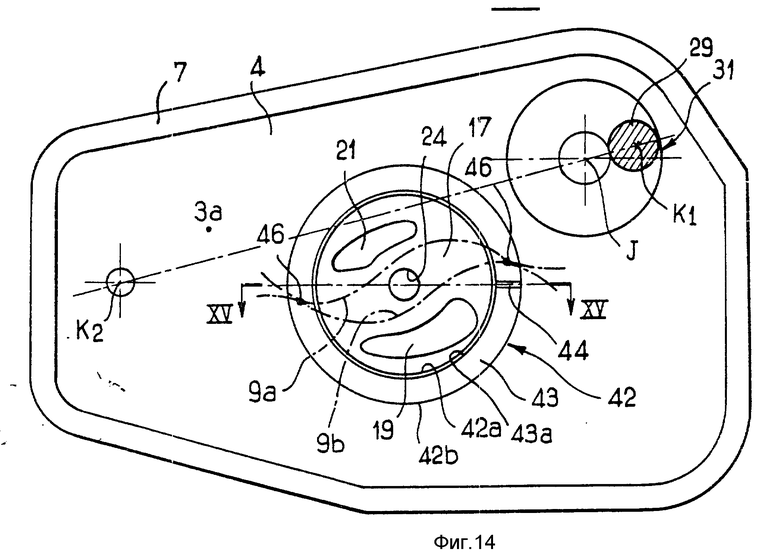
в примере, представленном на фиг. 14 и 15, поверхность 3a полностью образована соответствующей головкой 4 блока элементарных машин, и отверстия впуска 19 и выпуска 21 здесь не являются регулируемыми по положению относительно оси центрального отверстия 24. В поверхности 3a предусмотрена круговая канавка 42, например, центрированная по оси центрального отверстия 24.
Эта канавка частично занята плоским кольцом 43, имеющим радиальную прорезь 44. Кольцо 43 имеет наружный диаметр, по существу равный наружному диаметру канавки 42. Его осевая толщина и его радиальная ширина меньше соответственно осевой глубины и радиальной ширины канавки 42.
Кроме того, положение канавки 42, диаметр наружного по радиусу края 42b и радиальная ширина кольца 43 выбираются такими, чтобы линии положений сближения между собой первых звеньев 9a и 9b располагались в радиальном направлении между радиально наружным краем 42b канавки 42 и радиально внутренним краем 43a кольца 43 по крайней мере при положениях кривошипа 31, при которых камера 17 должна быть изолирована от периферийного пространства, окружающего эти звенья внутри периферийной стенки 7.
Кроме того, звенья 9a и 9b выполнены так, чтобы по крайней мере в этих указанных положениях кривошипа 31 перекрывать полностью радиально внутренний край 43a кольца 43, за исключением тех участков этого края, которые расположены напротив камеры 17.
Иначе говоря, край 43a не должен быть видимым для наблюдателя, помещенного в периферийное пространство картера. Предпочтительно, чтобы прорезь 44 также не была видимой со стороны этого пространства.
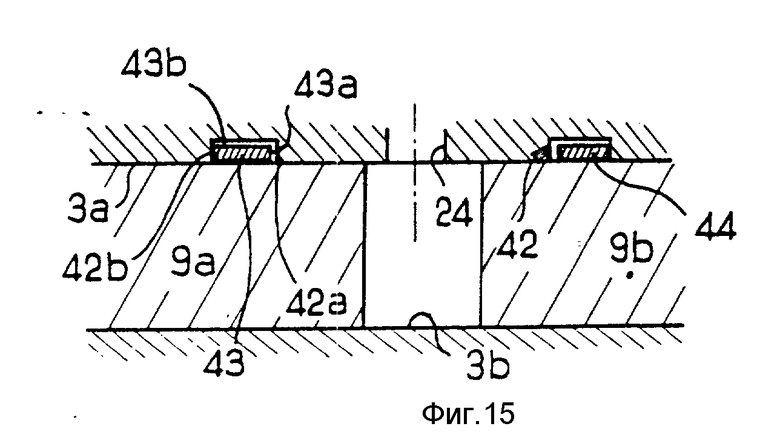
Таким образом, высокое давление в камере 17 передается в канавку 42 и вызывает на радиально внутренней стороне 43a кольца 43 усилие, направленное радиально наружу, прижимающее по существу кольцо 43 к радиально наружному краю 42b канавки 42, а также усилие на задней стороне 43b кольца 43, направленное по оси к звеньям 9a и 9b, обеспечивающее герметичность между кольцом 43 и этими звеньями.
Прорезь 44 кольца 43 позволяет кольцу 43 увеличиваться в диаметре и прижиматься к радиально наружному краю 42b под давлением газов, воздействующих на радиально внутреннюю сторону 43a кольца 43.
Так как линии 46 сближенного положения звеньев 9a и 9b между собой находятся всегда напротив кольца 43, то кольцо 43 препятствует проходу газов из камеры 17 за линию сближения 46, а следовательно, и в периферийное пространство путем утечки вдоль поверхности 3a.
Кроме того, осевое усилие, действующее на кольцо 43, передается кольцом 43 на звенья 9a, 9b и прижимает их к поверхности 3b, что обеспечивает герметичность за счет контакта между поверхностью 3b и звеньями 3a и 3b. Это препятствует утечке газа из камеры 17 в перфорированное пространство вдоль поверхности 3b.
Между задней стороной 43b кольца 43 и дном канавки 42 может быть размещен упругий элемент в виде волнистой шайбы или аналогичный для создания начального прижатия кольца 43 к звеньям 9a и 9b, чтобы избежать такого положения, когда газы будут прижимать кольцо 43 ко дну канавки 42 вместо того, чтобы прижимать его к звеньям 9a и 9b.
Общая площадь задней стороны 43b кольца 43 выбирается достаточной для того, чтобы получить достаточное по величине усилие по оси, производимое газами на кольцо 43.
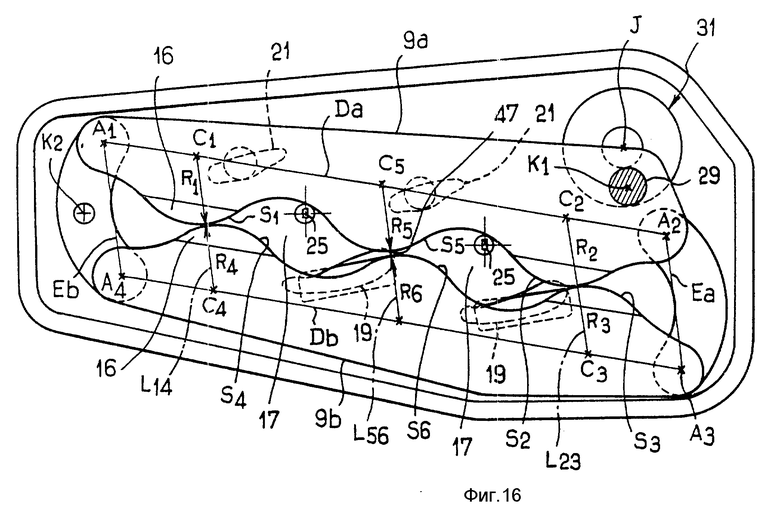
Пример, иллюстрированный фиг. 16, описывается лишь в части, отличающей устройство от показанного на фигурах 1-9.
Первые звенья 9a и 9b удлинены и содержат обращенные друг к другу три выпуклые цилиндрические поверхности S1, S2, S5 и соответственно S3, S4 и S6. Оси C5 и C6 поверхностей S5 и S6 пересекаются одной и той же линией L56, расположенной на одинаковом расстоянии от линий L14 и L23, параллельно последним. Поверхности S5 и S6, образуют таким, образом пару выпуклых цилиндрических поверхностей, находящуюся между парой S1, S4 и парой S2, S3, описанными выше.
Радиус R5 и R6 поверхностей S5 и S6 несколько меньше, чем равные между собой радиусы R1.R4 поверхностей S1.S4. Таким образом, между поверхностями S5 и S6 имеется небольшой зазор 47.
Этот зазор не вызывает неудобства, так как обе камеры 17, образующиеся между звеньями 9a и 9b по обе стороны от зазора 47, находятся всегда под одинаковыми давлениями и на одинаковых стадиях рабочего цикла при всех угловых положениях кривошипа 31.
Поэтому поверхности S5 и S6 не требуют особой тщательности обработки и, в частности, нет необходимости выполнять их на таких накладках 16, как те, которые несут поверхности S1.S4.
Так очень просто и с минимальными габаритами выполняют машину, рабочий объем которой вдвое больше, чем объем машины, показанной на фиг. 1-9.
Так как амплитуда движения камеры 17, образующейся ближе к координационной оси K2, меньше, чем амплитуда движения другой камеры 17, расположенной справа на фиг. 16, впускное и выпускное отверстия могут иметь форму и взаимное расположение несколько отличные для двух камер (не показано).
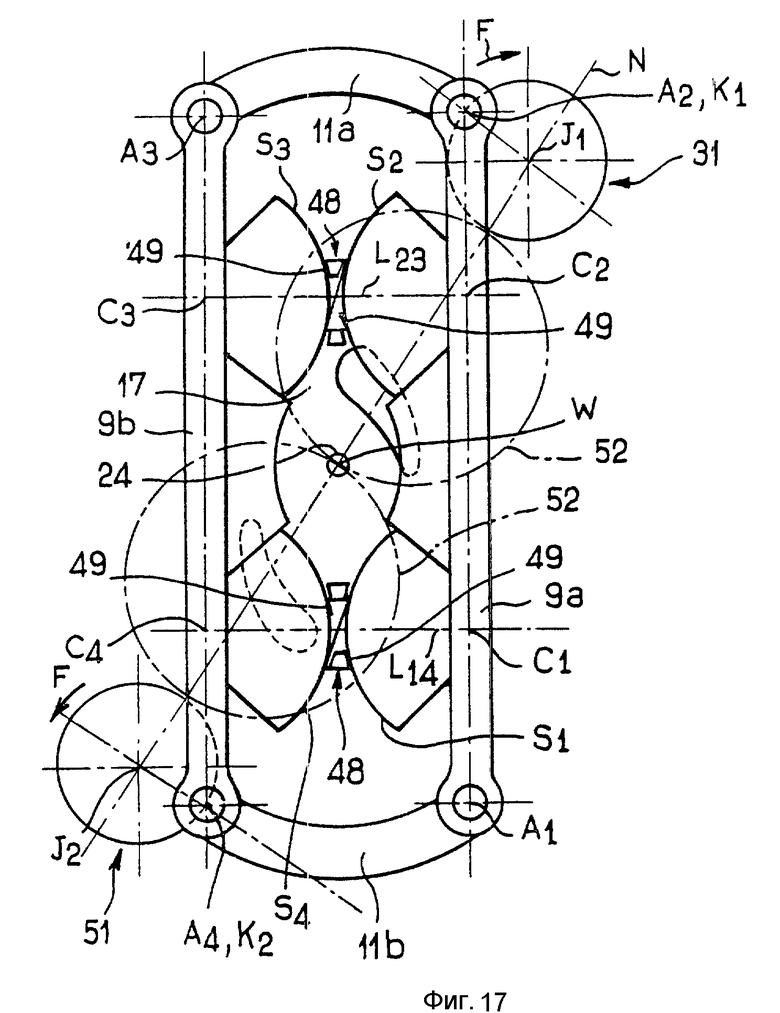
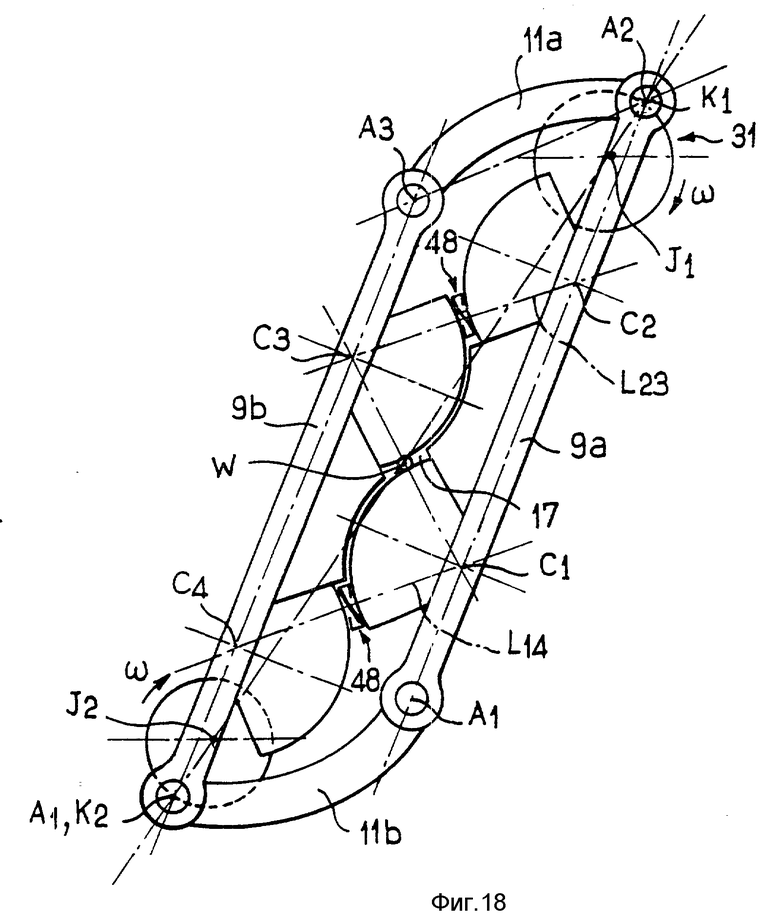
В примере, схематично представленном на фиг. 17-19, узел, образуемый четырьмя звеньями 9a, 9b, IIa, IIb, такой же, как показанный на фиг. 1 9, и содержит по две выпускные цилиндрические поверхности S1, S2 и соответственно S3 и S4 на каждом из первых звеньев 9a и 9b.
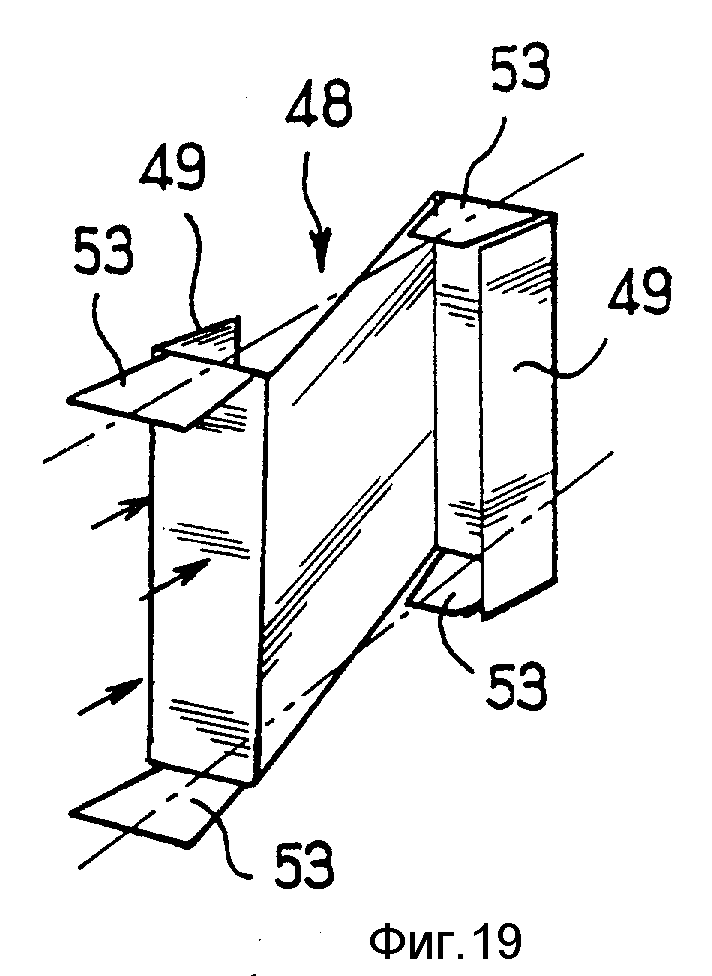
Однако средства динамической герметизации между выпуклыми цилиндрическими стенками одной пары S1 и S4 и соответственно S2 и S3 вместо того, чтобы заключаться в простом сближении соответствующих поверхностей, содержат для каждой пары плавающую перемычку 48 Z-образной формы, каждое основание которой заканчивается слегка загнутым внутрь ребром 49.
Такая плавающая перемычка обеспечивает сопряженность более легко достижимую, чем с помощью двояковогнутой детали, которая имела бы две противоположные вогнутые цилиндрические поверхности, охватывающие две выпуклые цилиндрические стенки такие, как, например, S2 и S3, между которыми должна быть обеспечена герметичность.
Каждая перемычка 48 самоцентрируется по линии L14 или L23 соответственно так как оба участка перемычки, располагающиеся по обе стороны от этой линии, более широкие, чем расстояние, существующее между двумя цилиндрическими стенками вдоль этой линии.
Таким образом, каждая плавающая перемычка 48, скользящая одновременно по двум цилиндрическим стенкам одной пары, например по стенкам S2 и S3, герметичность между которыми она обеспечивает, всегда автоматически устанавливается нужным образом, чтобы обеспечить эту герметичность каково бы ни было взаимное расположение звеньев 9a, 9b, IIa, IIb.
Как показано на фиг. 19, плавающие перемычки 48 имеют на каждом продольном конце, в продолжении оснований Z, загнутые внутрь камеры 17 язычки 53 для герметичной опоры на поверхности 3a и 3b картера.
Вариант выполнения, представленный на фиг. 17 19, кроме того, отличается от варианта по фиг. 1-9 средствами координации, которые содержат, кроме кривошипа 31, связанного с приводным валом (не показано), второй кривошип 51, связанный с кривошипом 31 через две шестерни 52, установленные ступенчато так, что второй кривошип 51 вращается с той же скоростью, что и кривошип 31, но в противоположном направлении.
Кривошип 31 приводит во вращение первую ось координации K1, которая в этом варианте совмещена с осью шарнира A2. Второй кривошип 51 приводит во вращение вторую ось координации K2, которая в этом примере совмещена с осью шарнира A4, противолежащей оси A2.
Оси координат K1 и K2 таким образом симметричны относительно центра W параллелограмма A1, A2, A3, A4, совпадающего с осью отверстия 24 для свечи зажигания.
Вся машина симметрична относительно этого центра, в том числе оси вращения J1 и J2 двух кривошипов 31 и 51.
На фиг. 17 машина представлена в положении максимального объема камеры 17. Положения, при которых этот объем минимален, получаются, когда оси K1 и K2 оказываются на прямой N, пересекающей оси J1 и J2.
На фиг. 18 машина представлена в положении, близком к такому положению минимального объема.
Путем соответствующего подбора расстояния между осями J1 и J2 двух кривошипов 31 и 51, а также радиуса вращения осей K1 и K2 вокруг осей J1 и J2, определяют расстояние между осями K1 и K2 в каждом из двух положений минимального объема камеры 17 и, следовательно, имеется возможность, как в вариантах выполнения, описанных выше, получения разных величин минимальных объемов камеры 17.
В процессе работы центр W параллелограмма A1, A2, A3, A4 неподвижен. Поэтому движения четырех звеньев 9a, 9b, IIa, IIb складываются из возвратно-поступательных движений звеньев 9a, 9b при соответствующих вращательных движениях звеньев IIa, IIb и накладывающегося колебательного движения всего узла вокруг геометрической оси, проходящей через центр W.
Высококачественное уравновешивание всех инерционных сил, производимых этим сочетанием движений, может быть достигнуто в машине, состоящей из двух элементарных машин, наложенных друг на друга (как показано на фиг. 3) со смещением на 180o углового положения кривошипов 31 этих машин друг относительно друга.
В примере, показанном на фиг. 17 19, герметизирующие перемычки 48 неподвижны относительно линий L14 и L23.
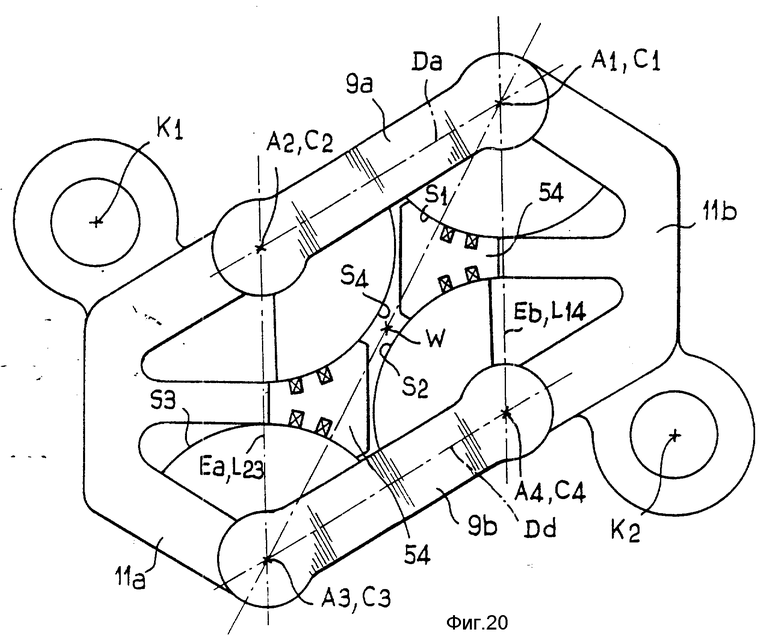
Вариант осуществления изобретения, показанный на фиг. 20, использует этот вывод. Вторые звенья поворачиваются относительно первых звеньев на осях соответствующих выпуклостей цилиндрических стенок S1.S4.
Иначе говоря, оси A1 и C1.A4 и C4 совмещены попарно. В этих условиях продольная ось Ea или Eb каждого второго звена IIa, IIb совмещена с линией L23 или L14 соответственно. Каждая деталь динамической герметизации 54 в таком случае неподвижна относительно одного из вторых звеньев IIa и IIb.
Это позволило выполнить жесткую связь между каждой деталью динамической герметизации 54 и соответствующим одним из вторых звеньев IIa и IIb.
Каждая деталь динамической герметизации имеет двояковогнутую форму, позволяющую ей охватывать обе выпуклые цилиндрические стенки, динамическую герметизацию между которыми эта деталь обеспечивает.
Это позволяет обеспечить между каждой деталью динамической герметизации 54 и двумя цилиндрическими стенками, с которыми она взаимодействует, высококачественную герметичность, пригодную, например, для работы по типу дизеля.
Кроме того, в примере по фиг. 20 координационные оси K1 и K2 связаны каждая с соответствующим одним из вторых звеньев IIa и IIb в положениях, симметричных относительно центра W параллелограмма A2, A2, A3, A4. Оси K1 и K2 приводятся во вращение двумя кривошипами, такими как 31 и 51 на фиг. 17 и 18, симметричными относительно центра W и связанными друг с другом так, что они вращаются в противоположных направлениях.
Выполнение машины согласно изобретению очень простое, все важные функциональные поверхности не могут быть выполнено плоскими или цилиндрическими. Герметизирующие взаимодействия осуществляются с нулевой или слабой нагрузкой, благодаря чему износ машины уменьшается. Скорость относительно перемещения в местах, где проходят линии или поверхности, по которым осуществляется герметизация, очень мала по сравнению со скоростью вращения кривошипа.
Кроме того, применяемая скорость вращения кривошипа позволяет осуществлять вдвое больше циклов в единицу времени, чем в традиционном двигателе с поршнями и цилиндрами.
Можно также предусмотреть скорости вращения, вдвое большие скоростей обычных двигателей, которым соответствует число циклов в единицу времени, в четыре раза больше, чем в традиционном двигателе.
При таких тактовых скоростях времени сгорания и расширения очень мало и теплопотери очень ограничены. Для некоторой данной мощности удвоение скорости и уменьшение вдвое число циклов за один оборот кривошипа позволяет теоретически получить полезный объем ("объем цилиндра") в четыре раза меньший, что ограничивает поверхности теплопередачи, это тоже еще больше ограничивает теплопотери.
Заметим также, что движение первых и вторых звеньев 9a, 9b, IIa, IIb при поверхностях 3a и 3b представляет собой вращательное движение без мертвой точки, что исключительно благоприятно для осуществления идеальной притирки, что делает рассматриваемые поверхности хорошо сопротивляющимися износу и обеспечивающими исключительно хорошую герметичность только за счет близости поверхности (касания их между собой). Большая поверхность контакта звеньев 9a и 9b с поверхностями 3a и 3b способствует охлаждению звеньев 9a и 9b.
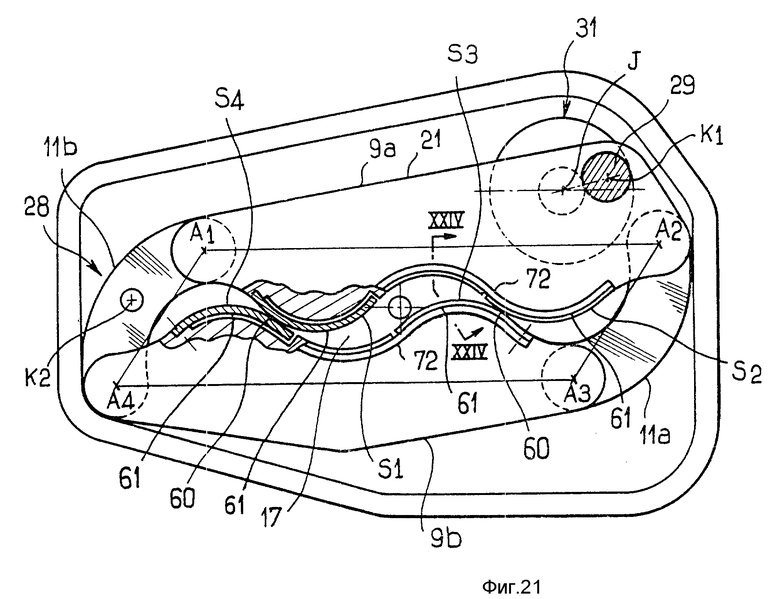
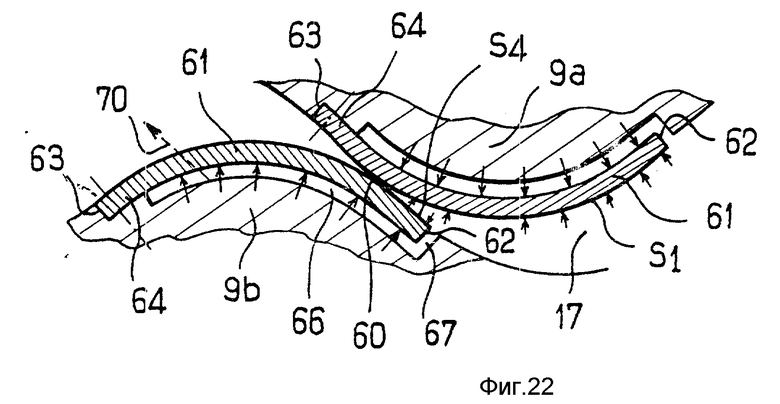
В примере, представленном на фиг. 21-24, цилиндрические стенки 1-4 образованы вкладышами 61, которые в каждой паре непосредственно опираются друг на друга по линии герметизации 60, образующей один из концов камеры 17.
Каждый вкладыш имеет свободный внутренний край 62, всегда располагающийся вне камеры 17. Наружный край 63 примыкает к зоне крепления 64 вкладыша 61. Зона 64, всегда расположенная вне камеры 17, герметично крепится к первому звену 9a и 9b, с которым она связана.
Каждое первое звено несет, следовательно, два вкладыша 61, направленных встречно друг другу концами, противоположными соответствующим участкам крепления 64.
Вне участка крепления 64 вкладыш 61, выполненный, например, из стали, является плавающим, упруго работая на изгиб. Он упирается в другой вкладыш этой же пары за счет упругого предварительного напряжения, получаемого при установке.
Позади каждого вкладыша 61 имеется промежуточное пространство 66, сообщающееся с камерой 17 через зазор 67, примыкающий к внутреннему краю 62 вкладыша.
Таким образом, когда камера 17 занята газом под давлением, этот газ проходит в промежуточное пространство 66 для усиления взаимного прижатия обоих вкладышей 61 каждой пары. Задние поверхности вкладышей 61 постоянно по всей своей длине подвергаются воздействию давления, имеющегося в камере 17, и наоборот, их передние поверхности, т. е. цилиндрические стенки S1 и S4, подвергаются воздействию давления в камере 17 только на ограниченной и переменной длине.
Когда камера 17 находится в одном (из двух возможных) положении минимального объема (фиг. 22), одна из цилиндрических стенок (S1) каждой пары практически по всей своей длине подвергается воздействию давления, имеющегося в камере 17, тогда как другая цилиндрическая стенка (S4) подвергается воздействию этого давления лишь на коротком участке части своей длины.
Следовательно, давящее усилие, действующее на эту стенку 4, компенсирует лишь очень малую часть усиления, действующего на заднюю поверхность связанного с ней вкладыша 61, и поэтому эта стенка с большим усилием прижимается к другому вкладышу.
Этот последний не испытывает слишком значительный прогиб, так как нажим на него осуществляется вблизи его крепежного участка 64, т. е. со слабым изгибающим моментом.
Напротив, когда объем камеры по существу максимален, усилие, определяемое давлением, почти одинаковое на обоих вкладышах, и они, таким образом, находятся в равновесии между собой при очень небольшой деформации по сравнению со статическим состоянием. Таким образом, деформация вкладышей незначительна во всех случаях.
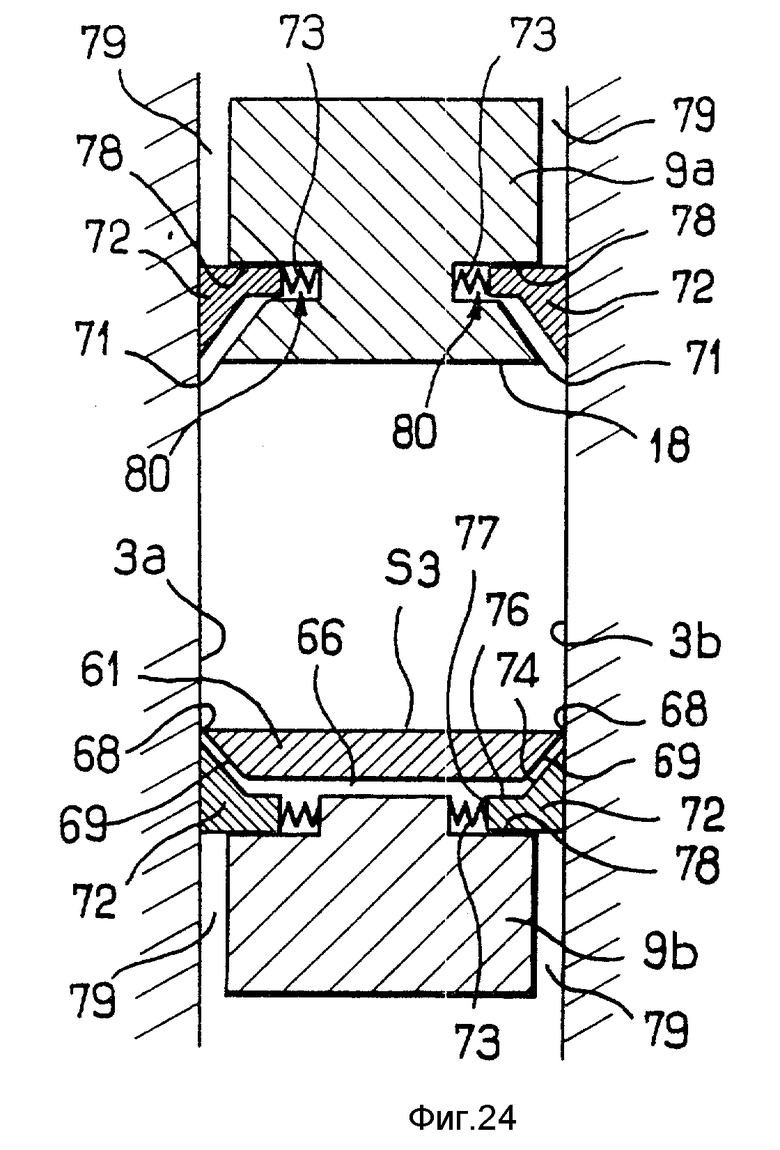
Как показано на фиг. 24, каждый вкладыш 61 содержит вдоль каждой поверхности 3a или 3b боковой край, образованный кромкой 68, форма которой определяется соответствующей цилиндрической стенкой, например 53, и скошенной стенкой 69, образующей угол 45o с цилиндрической стенкой 53.
При движениях прогиба вкладыша 61 внутренний край 62 и кромка 68, так же, как и цилиндрическая стенка, которую они окаймляют, перемещаются относительно корпуса соответствующего первого звена. Кромка 68 находится в подвижном и по существу герметичном контакте с соседней с ней поверхностью 3a или 3b.
Таким образом, газ, находящийся в промежуточном пространстве 66, не может с легкостью выйти из этого пространства так, как показано на фиг. 22 стрелкой 70.
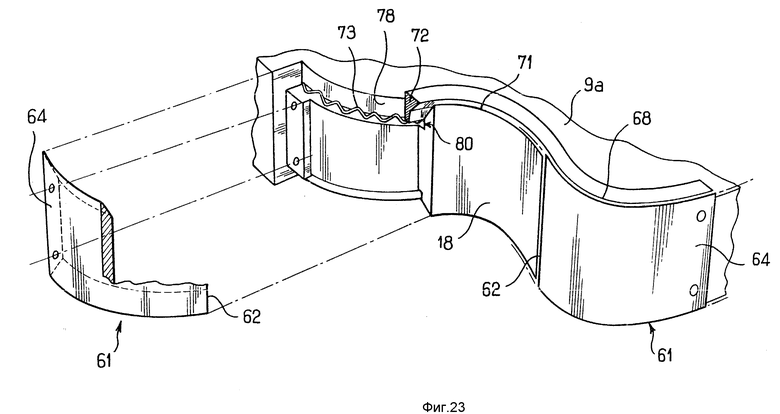
Как показано на фиг. 24, каждая стенка связи 18 жестко укреплена на корпусе несущего ее звена (9a). Она также заканчивается двумя боковыми кромками 71, но эти кромки 71 несколько отступают от поверхностей 3a и 3b, чтобы избежать всякого трения.
Со стороны, противоположной каждой кромке 68, промежуточное пространство 66 ограничено уплотняющим сегментом 72 (фиг. 24), подвижно и герметично упирающимся в примыкающую стенку 3a или 3b под действием предварительно сжатых пружин 73.
Каждый сегмент 72 имеет скошенную поверхность 74, параллельную скошенной поверхности 69 вкладыша 61, но расположенную по отношению к ней с некоторым зазором.
Этот скос 74, как и боковая поверхность 76 и задняя поверхность 77 каждого сегмента находятся под воздействием давления, созданного в промежуточном пространстве 66, которое способствует прижатию сегмента 72 к находящейся напротив него поверхности 3a или 3b и к опорной поверхности 78 корпуса соответствующего звена На фиг. 24 это звено 9b.
Этот двойной герметичный упор препятствует утечке газа под давлением из зоны 79 между корпусом первого звена 9a или 9b и каждой из поверхностей 3a или 3b, соответственно находящейся напротив.
Как также показано на фиг. 23, каждый сегмент 72 и связанная с ним пружина 73 непрерывно расположены между двумя участками крепления 64 двух вкладышей 61, связанных с соответствующим звеном 9a или 9b. Пружина 73 может представлять собой волнообразно изогнутый упругий пруток.
За стенкой связи 18 звено 9a или 9b имеет профилированный паз 80, выполненный напротив каждой из поверхности 3a или 3b, в который входит соответствующий участок длины сегменты 72 и пружины 73.
Этот паз 80 сообщается с камерой 17 через зазоры 67, между которыми он расположен, а также через промежутки, существующие между кромками 71 (фиг. 24) и поверхностями 3a и 3b.
Таким образом, и в этой зоне давление прижимает сегменты 72 к поверхностям 3a и 3b и к опорной поверхности 78 звеньев 9a и 9b.
Между камерой 17 и зонами 79 существует, таким образом, непрерывное уплотнение по всей длине звеньев 9a и 9b, которое способно обеспечить герметичность под давлением.
На практике вблизи крепежного участка 64 каждого вкладыша 61 стремятся обеспечить скорее надежность и снижение трения, чем идеальную герметичность, так как пути утечки, приводящие к этой зоне, очень сложны и узки, аналогичны лабиринтному уплотнению и в любом случае позволяют лишь совершенно незначительную утечку.
Кроме того, эффект лабиринта можно усилить выполнением шероховатостей на поверхностях, образующих промежуточное пространство 66.
Преимуществом вышеописанного варианта выполнения является обеспечение условий надежной герметизации между цилиндрическими стенками S1.S4 с помощью средств, в значительной мере независимых от состояния износа двигателя и от точности выполнения составляющих его деталей.
Кроме того, вкладыши 61 амортизируют вибрации первых звеньев друг относительно друга и не позволяют этим вибрациям вызывать соударения цилиндрических поверхностей S1.S4.
Это значительно увеличивает срок службы этих поверхностей и способствует длительному сохранению хорошей герметичности вдоль линии 60.
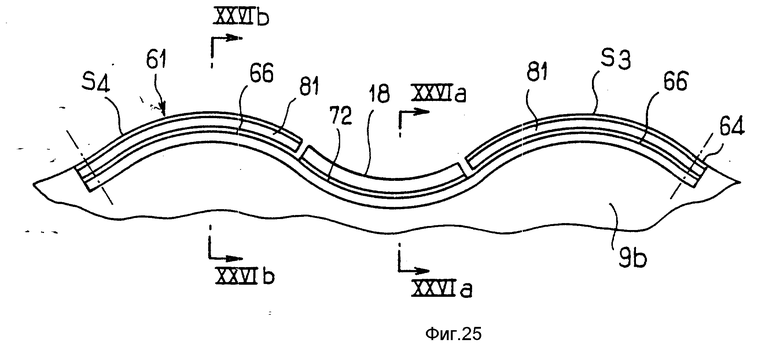
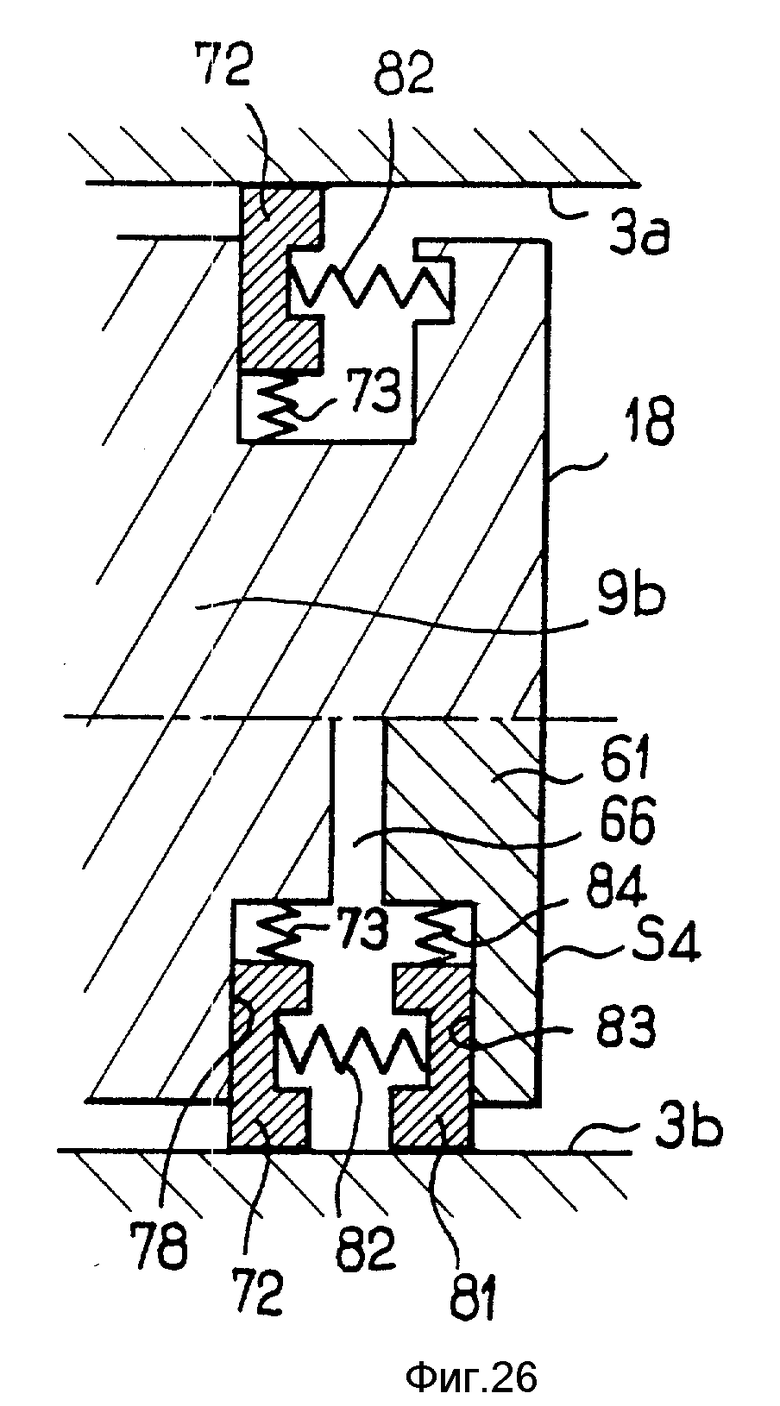
В варианте выполнения по фиг. 25 вдоль боковых краев вкладышей 61 добавлены сегменты 81 для того, чтобы в еще более значительной степени уменьшить возможность утечки по пути, обозначенному стрелкой 70 на фиг. 22. Сегмент 72 присутствует вдоль всего звена 9a или 9b, как было описано со ссылками на фигуры 21-24.
Таким образом, как показано в нижней части фиг. 26, вдоль каждой поверхности 3a или 3b промежуточное пространство 66 ограничено с двух сторон сегментами 72 и 81. Давление газов, подкрепленное усилием предварительно сжатой пружины 82, стремится раздвинуть оба сегмента и прижать их с обеспечением герметичности к поверхности 78 корпуса первого звена 9b и, соответственно, и к уплотняющей поверхности 83, предусмотренной на обратной стороне вкладыша 61.
Кроме того, давление, подкрепленное усилием, создаваемым предварительно сжатой пружиной 84, аналогичной пружине 73, постоянно прижимает сегмент 81 к соответствующей, находящейся напротив, поверхности 3b на фиг. 26. Вдоль стенки связи 18 (верхняя часть фиг. 26) расположен только один сегмент 72. На него действует давлением газов и усилия пружин 73 и 82, как описано выше.
Изобретение не ограничивается приведенными примерами его выполнения.
В примере по фиг. 1 ось K1 и/или ось K2 может быть совмещена с одной и/или второй из осей A1.A4.
В варианте по верхней части фиг. 3 можно выполнить золотниковые отверстия 19 и 21 в поверхности 3b, причем не на поворотной головке 8, а неподвижно в неповоротной пластине, единственной функцией которой было бы упираться в элементы 9a и 9b под действием давления, создаваемого в пространстве или камере противодавления 26.
В варианте выполнения по фиг. 14 и 15 можно разместить канавку 42 и кольцо 43 в поверхности 3b, чтобы было удобнее выполнять отверстия 19 и 21 в поверхности 3a, если желают, чтобы всасывающее отверстие представляло собой выемку такую, как показано на фиг. 10, которая в этом случае выполнялась бы только в поверхности 3a.
В варианте выполнения по фиг. 17 19 отсутствует взаимосвязь между плавающими перемычками 48, с одной стороны, и средствами координации, выполненными в виде двух коленчатых валов 31 и 51 (по всему тексту это кривошипы), с другой стороны, эти два усовершенствования могут быть использованы независимо друг от друга.
Также в примере по фиг. 20 средства координации могут быть иными.
Изобретение может применяться для конструирования компрессоров или насосов, или других машин объемного сжатия расширения, работающих с двумя циклами за оборот, или также двухтактного двигателя, совершающего два цикла за один оборот.
В этих различных случаях следует соблюдать общее правило, заключающееся в том, чтобы оба положения минимального объема соответствовали одинаковым объемом так, чтобы оба цикла, выполняющиеся за один оборот кривошипа, были одинаковыми.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ СЦЕПЛЕНИЕМ И АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ, ИСПОЛЬЗУЮЩАЯ ЭТОТ СПОСОБ | 1992 |
|
RU2096670C1 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2496998C2 |
| САМООЧИЩАЮЩЕЕСЯ УСТРОЙСТВО СНИЖЕНИЯ ДАВЛЕНИЯ | 2021 |
|
RU2831689C2 |
| СПОСОБ ПРОЕКТИРОВАНИЯ И ИЗГОТОВЛЕНИЯ ТУРБИНЫ | 2021 |
|
RU2780311C1 |
| УСТАНОВКА И СПОСОБ ДЛЯ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ ЖИДКОГО ПРОДУКТА | 2009 |
|
RU2491603C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2140018C1 |
| СИСТЕМА И СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ТЕЛА ЧЕЛОВЕКА | 2021 |
|
RU2837804C2 |
| Роторная машина силовой установки с внешним подводом теплоты (варианты) | 2019 |
|
RU2731466C1 |
| ИНСТРУМЕНТАЛЬНАЯ МАШИНА | 2014 |
|
RU2684988C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТЕКУЧЕЙ СРЕДЫ, СПОСОБ И МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ТАКОГО УСТРОЙСТВА | 2013 |
|
RU2595701C2 |
Использование: двигателестроение. Сущность изобретения: четыре звена (9а, 99b, 11a, 11b) шарнирно связаны между собой, образуя деформируемый параллелограмм, с помощью четырех параллельных осей (A1...A4). Кривошип (31) приводит в круговое движение первую ось координации (K1), связанную с одним (9а) из звеньев. Другое звено (11b) шарнирно связано с корпусом машины с помощью второй оси координации (K2). Между цилиндрическими поверхностями (S1.. .S4), оси (C1... C4) которых пересекают продольные оси (Da, Db) первых звеньев (9а, 9b), образуется камера (17) с переменным объемом. Золотниковые отверстия (19, 21) поочередно открываются и закрываются звеньями в зависимости от углового положения кривошипа (31). Предусмотрена свеча зажигания (25). Каждое первое звено (9a, 9b) снабжено двумя выпуклыми цилиндрическими поверхностями (S1, S2; S3, S4), жестко связанными между собой. Каждая цилиндрическая поверхность динамически герметично связана с цилиндрической поверхностью, принадлежащей другому элементу. Изобретение применимо для конструирования машин с четырехтактным циклом. 42 з.п. ф-лы. 26 ил.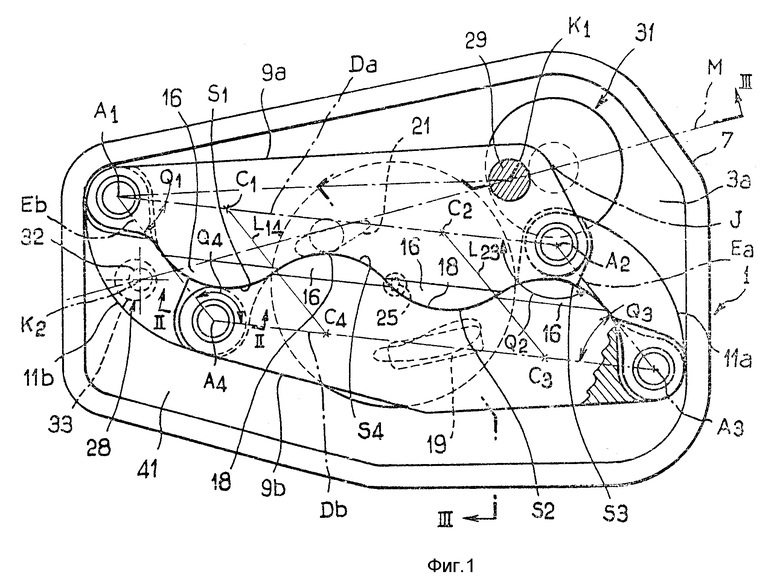
| FR, заявка, 2651019, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

