Изобретение относится к машиностроению, в том числе к моторостроению, компрессоростроению, насосостроению и т.д., и может быть использовано в механических устройствах и в объемных машинах, преобразующих энергию рабочей среды - жидкости или газа, например, в роторно-поршневых двигателях внутреннего сгорания с циклами типа Отто, Дизеля или в трохоидных двигателях типа Ванкеля.
Все известные способы преобразования движения в трохоидных объемных машинах сводятся к двум: вращательному /биротативному/ и планетарному. Согласно первому из них двух звеньям - охватывающему и охватываемому элементам, имеющим исходный и сопряженный профили, сообщают вращение вокруг неподвижных параллельных осей; согласно второму способу - одному из этих элементов сообщают планетарное движение относительно центра другого, причем неподвижного элемента.
Для планетарного способа преобразования движения количество полных циклов изменения объема камеры, ограниченной криволинейными поверхностями ротора и трохоидной поверхностью статора за одни оборот приводного вала, равно числу ветвей трохоиды j=/Z-1/, где Z=2,3,4... - любое целое число, равное количеству точек пересечения внутренней и наружной огибающих семейства трохоид. Количество же ходов грани ротора, при котором объем рабочего тела изменяется от минимального до максимального значения, равно 2j, каждый ход происходит при повороте центра планетарного элемента на угол γ = πZ/(Z-1)
Известные способы преобразования движения применяются в объемных машинах с одной независимой степенью свободы вращательного движения с сопряженными элементами криволинейной формы, например, в механизмах с циклоидальным зацеплением /авторское свидетельство СССР N 205567/.
Эти способы применяются в трохоидных объемных машинах, в которых в процессе движения сопряженных охватывающего и охватываемого элементов, имеющих внутренние или наружные трохоидные /циклоидные/ профили, происходят периодические изменения объема вытеснительных камер и различные термодинамические циклы /Бениович B.C., Апазиди Г.Д., Бойко А.М. Роторопоршневые двигатели. М. : Машиностроение, 1968 г./.
В известных объемных машинах взаимосвязанное движение охватывающего и охватываемого элементов обеспечивается механизмом синхронизации, а если на охватывающем элементе число формообразующих дуг профиля больше, чем на охватываемом элементе, то синхронизация обеспечивается путем самозацепления самих элементов, т.е. без применения специальных механизмов синхронизации.
Наиболее близким техническим решением к предложенному способу является способ преобразования движения в трохоидной объемной машине, включающий создание циклически изменяющихся замкнутых объемов между кинематически взаимодействующими элементами - ротором и корпусом - охватываемым и охватывающим элементами с циклоидными /трохоидными/ формами взаимодействующих геометрических поверхностей или при биротативном движении обоих упомянутых элементов /патент Франции N 2719874, 1995/.
Известные способы преобразования движения в объемных машинах с сопряженными элементами криволинейной формы, реализованные в объемных машинах, обладают ограниченными техническими возможностями, не позволяющими увеличить количество рабочих циклов, осуществляемых за один оборот /период обращения/ элементов вытеснительной пары, а также повысить КПД ввиду наличия реактивной силы на опорах неподвижного корпуса машины.
Задачей, на решение которой направлено настоящее изобретение, является расширение технических и функциональных возможностей путем увеличения числа независимых степеней свободы вращательного движения до двух и числа рабочих циклов изменения объемов рабочих /вытеснительных/ камер за один оборот приводного вала с одновременным уменьшением значений суммарного махового момента и реакций на опорах объемной трохоидной машины.
Для достижения указанного выше технического результата в известном способе преобразования движения в машине объемного расширения /вытеснения/, имеющей сопряженные элементы, ограниченные взаимоогибающими поверхностями, выполненными на одном из сопряженных элементов в виде криволинейной поверхности, а на другом - в виде наружной или внутренней огибающей семейства поверхностей, образованного с помощью вышеупомянутой криволинейной поверхности, заключающемся в том, что создают взаимосвязанные вращательные движения охватывающего и охватываемого сопряженных элементов с возможностью образования вытеснительных рабочих камер, и посредством звеньев синхронизирующей связи синхронизируют вращения охватывающего и охватываемого сопряженных элементов, осуществляют дифференциально связанные вращения двух вышеупомянутых сопряженных элементов вокруг своих осей и звена синхронизирующей связи два вращения из упомянутых выше являются независимыми друг от друга, причем угловые скорости вращении определяют из соотношения
K1ω1+K2ω2+ω3= 0,
где
ω1,ω2 -угловые скорости вращения вокруг своих осей вышеупомянутых сопряженных элементов,
ω3 - угловая скорость вращения звена синхронизирующей связи,
K1, K2 - постоянные коэффициенты связи,
при этом одновременно с вращением сопряженных элементов вокруг своих осей осуществляют дополнительно планетарное вращение любого из сопряженных элементов вокруг оси другого элемента, а величины угловых скоростей вращения сопряженных элементов выбирают из соотношения
(Z-1)ω1-Zω2+ω0= 0,
где ω1 - угловая скорость вращения вокруг своей оси элемента, поверхность которого выполнена в виде криволинейной поверхности,
ω2 - угловая скорость вращения вокруг своей оси элемента, поверхность которого выполнена в форме внутренней или наружной огибающей семейства поверхностей, образованного с помощью вышеупомянутой криволинейной поверхности,
ω0 - угловая скорость движения оси элемента, совершающего планетарное вращение,
Z - целое число, Z>1.
Кроме этого, любые два вращения из вращений двух сопряженных элементов вокруг своих осей и звена синхронизирующей связи могут синхронизировать между собой.
Кроме этого, передачу движения от одного элемента другому могут осуществлять путем введения в механическое соприкосновение криволинейные поверхности охватывающего и охватываемого сопряженных элементов с образованием при этом кинематической пары. Наиболее близким техническим решением к предложенному устройству является трохоидная объемная машина, содержащая корпус с основной осью, в котором расположены охватывающий и охватываемый сопряженные элементы с возможностью образования рабочих камер, синхронизирующая связь между сопряженными элементами, при этом один из сопряженных элементов выполнен с поверхностью в форме криволинейной поверхности, а другой элемент - в виде наружной или внутренней огибающей семейства вышеупомянутой криволинейной поверхности.
Рабочие камеры образованы охватывающим и охватываемым элементами и двумя плоскими торцевыми стенками, синхронизатор образован зубчатой парой, включающей шестерни внешнего и внутреннего зацепления, при этом в корпусе размещен эксцентриковый вал с коренными шейками и ротор, имеющий несколько вершин с дугообразными сторонами, размещенный шарнирно на эксцентрике эксцентрикового вала и жестко соединенный с шестерней внутреннего зацепления, находящийся в постоянном зацеплении с шестерней внешнего зацепления торцевой стенки /Сухомлинов Р. М. Трохоидные роторные компрессоры. Изд. объединение Вища школа, Госуниверситет, Харьков, 1975 г., стр.70-71/.
Известное устройство обладает одной независимой степенью свободы вращательного движения и ограниченными техническими возможностями, не позволяющими увеличить количество рабочих циклов, осуществляемых за один оборот /период обращения/ элементов вытеснительной пары, а также повысить КПД ввиду наличия реактивной силы на опорах неподвижного корпуса машины. Так, например, в двигателе Ванкеля один полный цикл, равный четырем указанным рабочим циклам, осуществляется за три оборота эксцентрикового вала. Кроме того, у известных объемных трохоидных машин на опоры неподвижного корпуса действуют существенные статический реактивный и инерционный моменты, что снижает их надежность и долговечность.
Задачей, на решение которой направлено настоящее изобретение, является расширение технических и функциональных возможностей путем увеличения числа независимых степеней свободы вращательного движения до двух и увеличения диапазона передаточных отношений механизмов с криволинейными элементами и увеличения числа рабочих циклов изменения объемов вытеснительных камер за один оборот приводного вала с одновременным уменьшением значений суммарного махового момента и реакций на опорах объемных трохоидных машин.
Для достижения указанного выше технического результата в известной машине объемного расширения /вытеснения/, содержащей корпус с основной осью, охватывающий и охватываемый сопряженные элементы, установленные с возможностью образования рабочих камер, и синхронизатор, имеющий по меньшей мере одно звено, один из сопряженных элементов шарнирно установлен в корпусе или синхронизаторе с возможностью вращения вокруг основной оси, а второй сопряженный элемент установлен в синхронизаторе с возможностью планетарного вращения вокруг оси первого элемента, при этом один из сопряженных элементов выполнен с криволинейной поверхностью, а другой элемент - в виде наружной или внутренней огибающей семейства поверхностей, образованного с помощью вышеупомянутой криволинейной поверхности, синхронизатор установлен в корпусе с возможностью вращения относительно основной оси, при этом по меньшей мере один из сопряженных элементов и синхронизатор или по меньшей мере два сопряженных элемента связаны между собой с образованием кинематической цепи, установленной с возможностью синхронизации вращений двух сопряженных элементов вокруг своих осей или вращения одного из сопряженных элементов вокруг своей оси и вращения оси другого сопряженного элемента, совершающего планетарное вращение, вокруг основной оси, в соответствии с соотношением
K1ω1+K2ω2+ω3= 0,
где ω1,ω2 - угловые скорости вращения вокруг своих осей вышеупомянутых сопряженных элементов,
ω0 - угловая скорость вращения оси элемента, совершающего планетарное движение,
K1, K2 - постоянные коэффициенты связи, при этом любые два из трех вышеупомянутых вращений ω0,ω1,ω2 независимы друг от друга.
Кроме этого, машина может быть снабжена дополнительным синхронизатором, связанным по крайней мере с любыми двумя из следующих частей объемной машины - синхронизатором, корпусом, сопряженными элементами.
Кроме этого, дополнительный синхронизатор может быть выполнен в виде передачи с передаточным отношением, равным плюс или минус единице, или механизма кругового поступательного движения одного из сопряженных элементов, или кулисного механизма, или инвертора направления вращения.
Кроме этого, машина может быть снабжена дополнительной кинематической цепью, связанной с любыми двумя из следующих частей машины - синхронизатором, корпусом, сопряженными элементами с возможностью уменьшения на единицу количества независимых степеней свободы машины.
Кроме этого, дополнительная кинематическая цепь может быть выполнена в виде планетарной зубчатой передачи.
Кроме этого, один из сопряженных элементов выполнен с цилиндрическими цевками.
Кроме этого, она может быть снабжена устройствами передачи вращений, связанными по меньшей мере с двумя из следующих вращающихся частей машины: сопряженными элементами и дополнительным синхронизатором, и имеющими средства для соединения по меньшей мере с двумя вращающимися элементами внешних устройств.
Кроме этого, она может быть снабжена дополнительными охватывающими и охватываемыми сопряженными элементами, выполненными с вышеупомянутой криволинейной поверхностью или ограниченной огибающей семейства вышеупомянутой криволинейной поверхностью, установленными с возможностью образования дополнительных рабочих камер и с возможностью вращательного и планетарного движений, при этом все сопряженные элементы расположены или соосно рядом, или коаксиально в камерах друг относительно друга и связаны одни с другими.
Кроме этого, один из вышеупомянутых сопряженных элементов может быть жестко соединен с одним дополнительным сопряженным элементом, другой сопряженный элемент жестко соединен с вторым дополнительным сопряженным элементом, при этом упомянутые элементы установлены в рабочих камерах друг относительно друга коаксиально.
Кроме этого, охватывающие и охватываемые сопряженные элементы могут быть установлены с возможностью механического соприкосновения их криволинейных поверхностей и образования при этом кинематической пары.
На фиг. 1 изображена схема, поясняющая способ преобразования движения в трохоидной объемной машине.
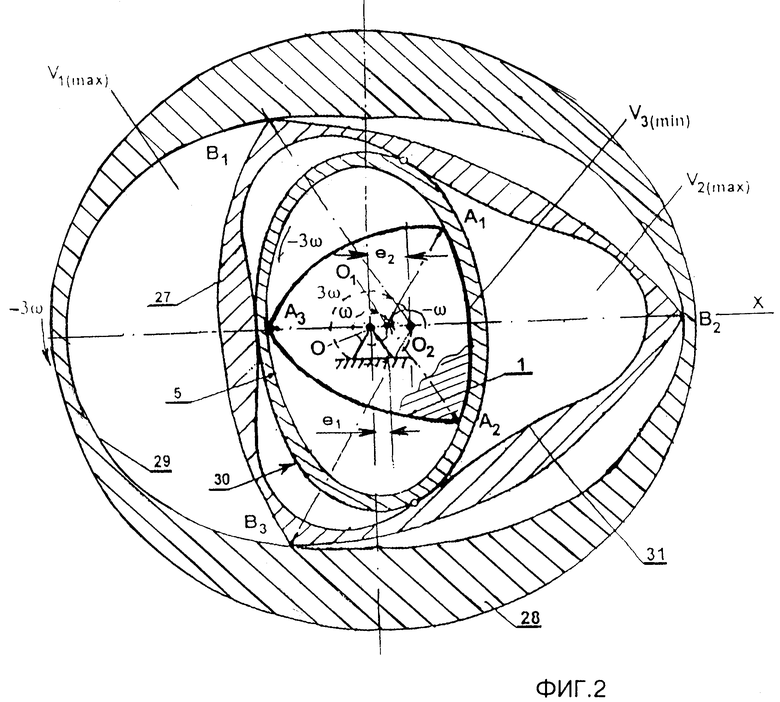
На фиг. 2 - поперечное сечение рабочих камер объемной машины с дополнительными охватывающими и охватываемыми элементами.
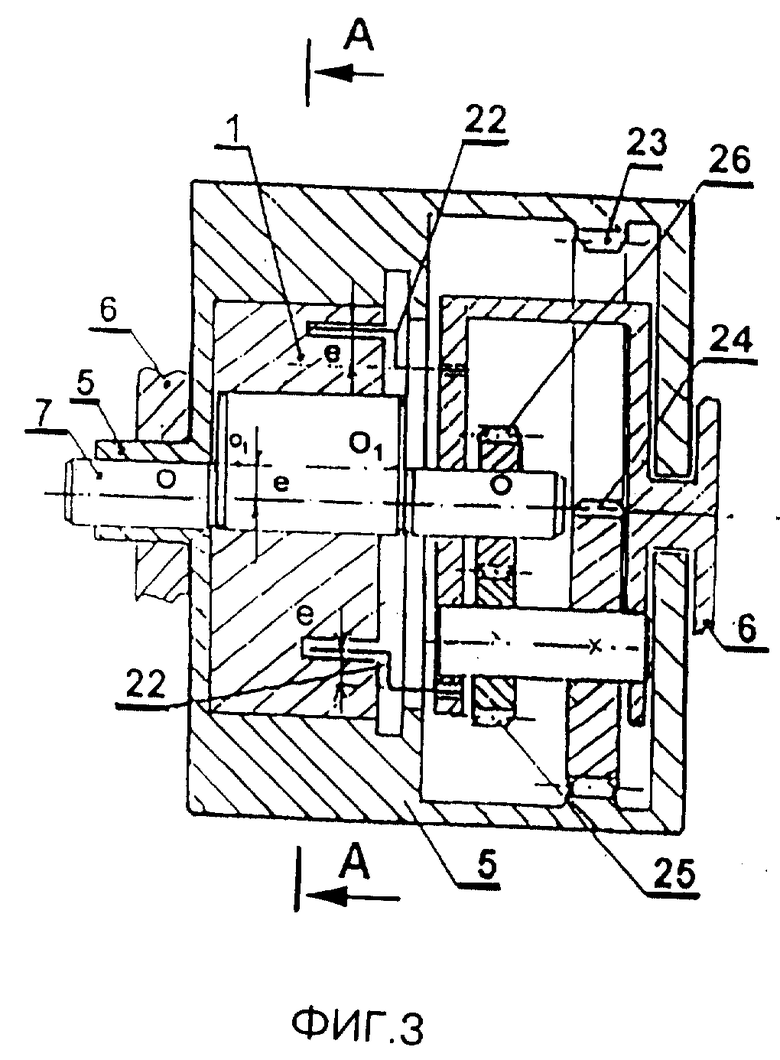
На фиг. 3 - продольный размер объемной машины, выполненной с круговым поступательным движением охватываемого элемента, профиль которого выполнен по внутренней огибающей.
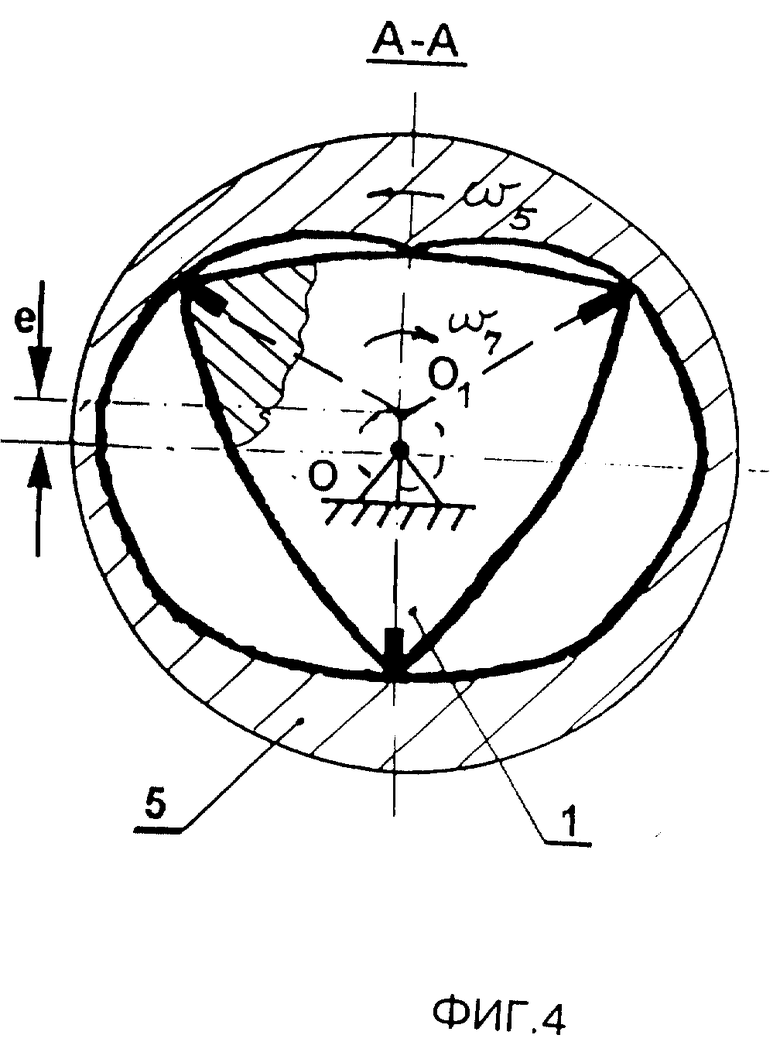
На фиг. 4 - сечение А-А по фиг. 3
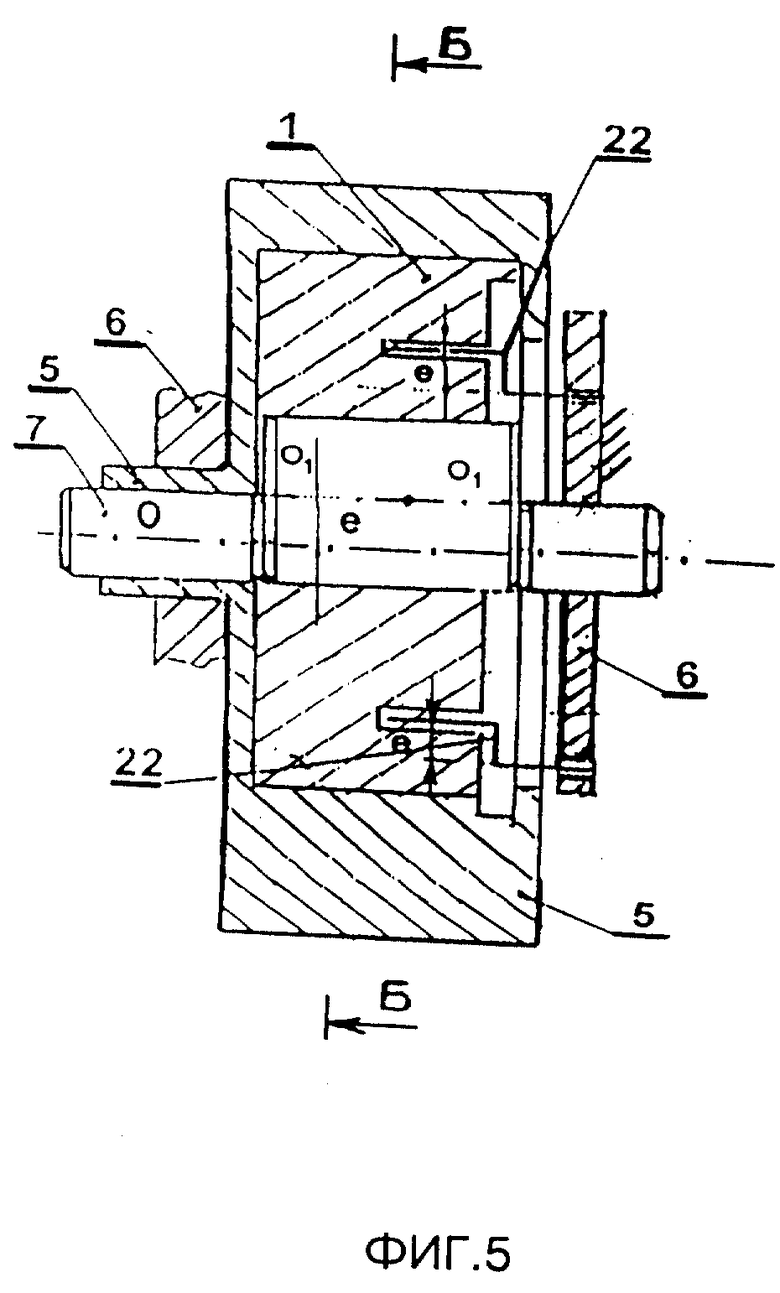
На фиг. 5 - продольный размер объемной машины, выполненной с круговым поступательным движением охватываемого элемента, профиль которого выполнен по двухдуговой трохоиде.
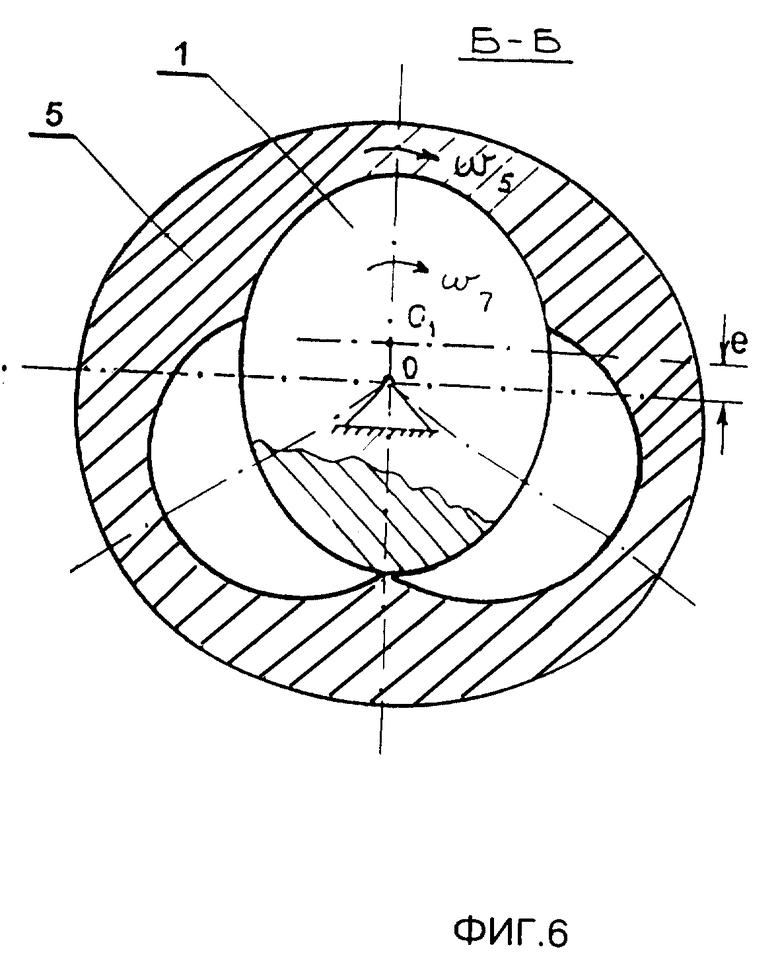
На фиг. 6 - сечение Б-Б по фиг. 5
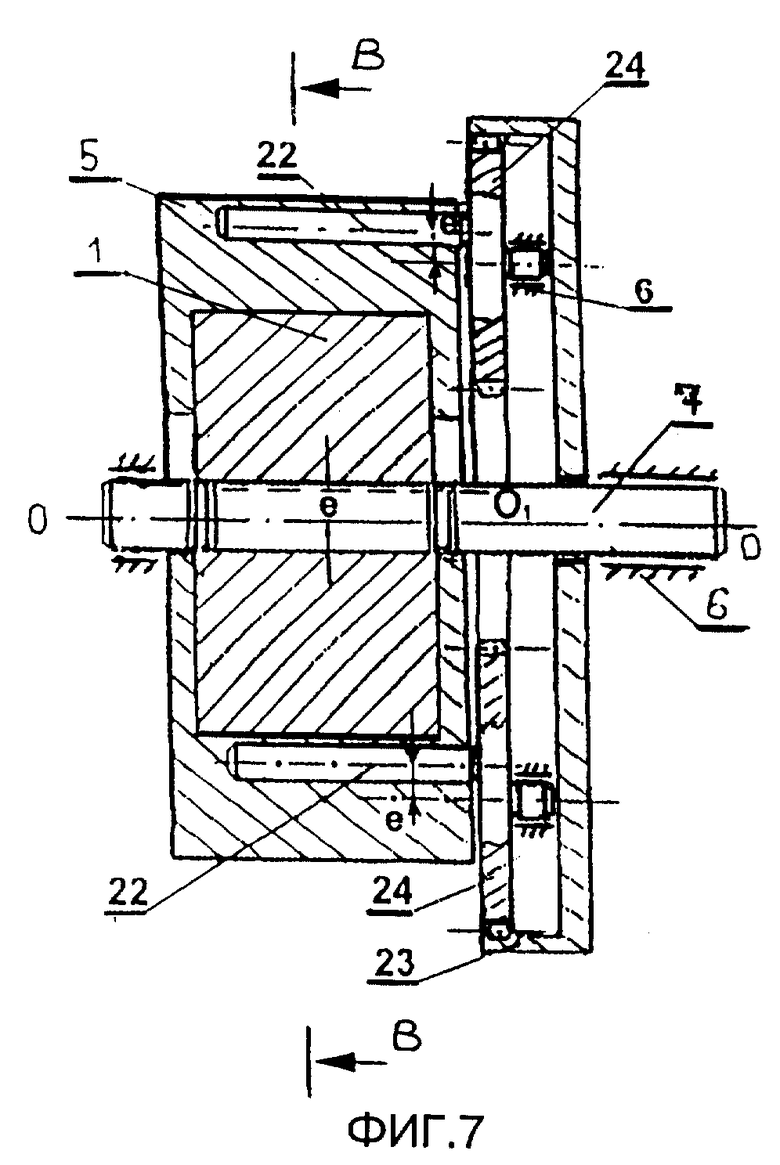
На фиг. 7 - продольный размер объемной машины, выполненной с круговым поступательным движением охватывающего элемента, профиль которого выполнен по двухдуговой трохоиде.
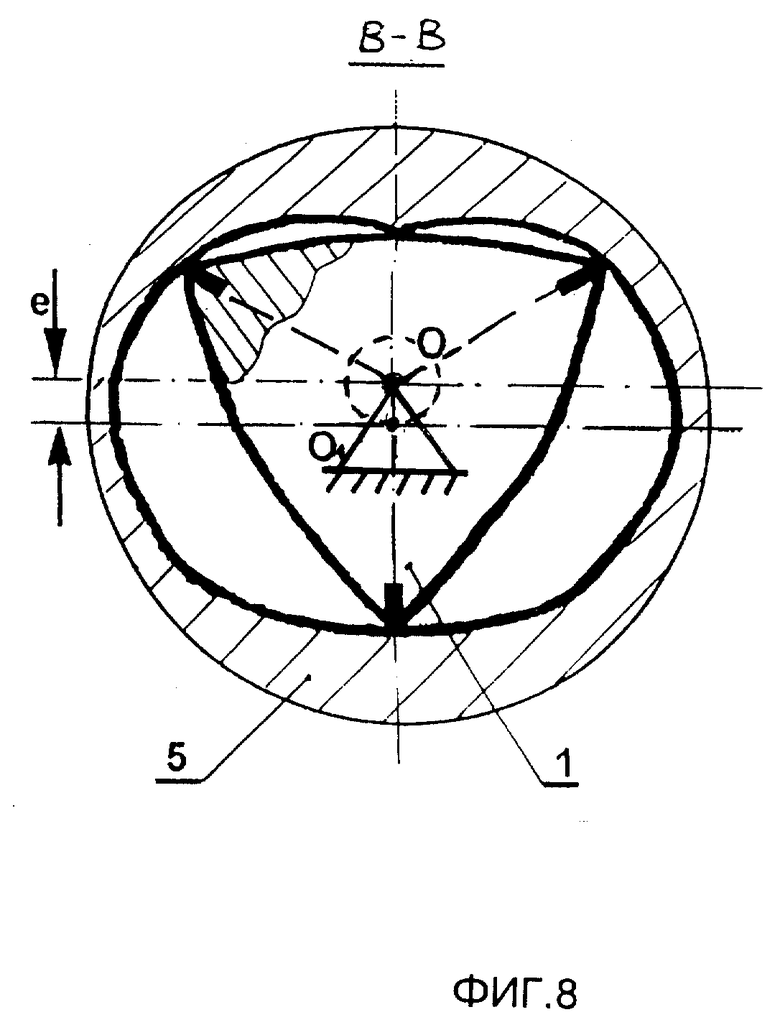
На фиг. 8 - сечение В-В по фиг. 7
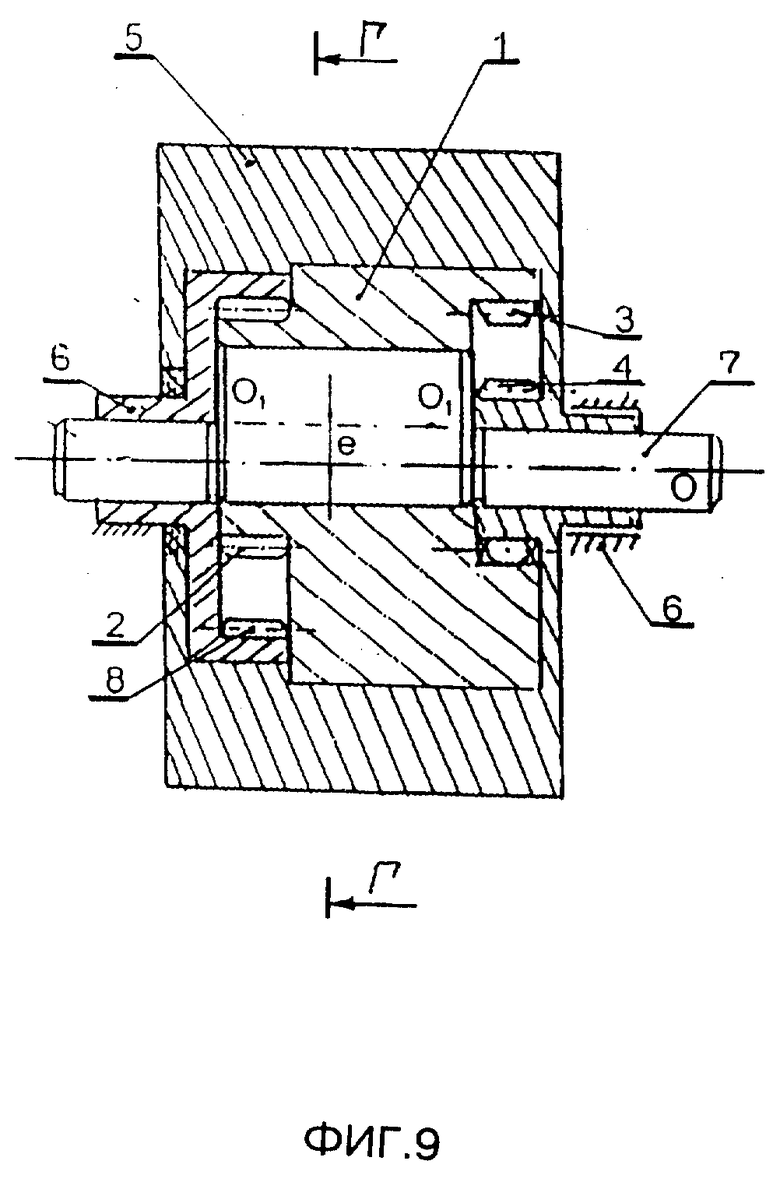
На фиг. 9 - продольный размер объемной машины с синхронизатором, выполненным в виде зубчатых колес с планетарным движением охватываемого элемента, профиль которого выполнен по внутренней огибающей.
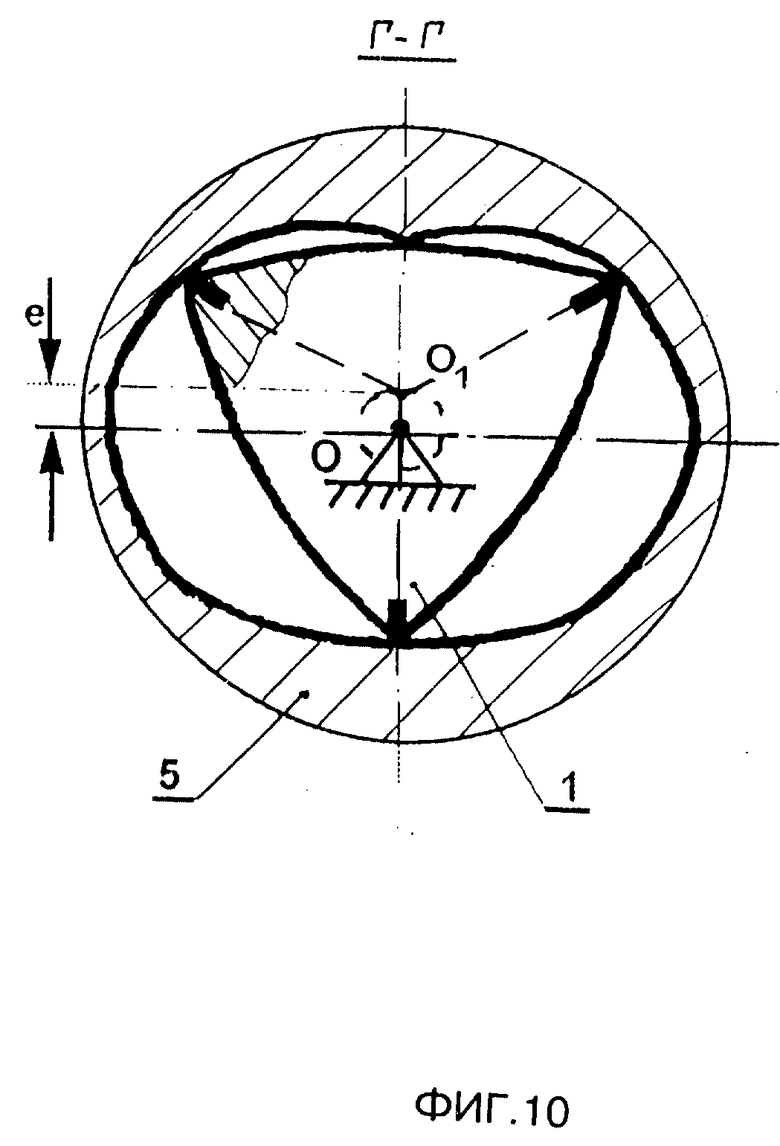
На фиг. 10 - сечение Г-Г по фиг.9.
Предложенный способ преобразования движения в объемной машине, выполненной с сопряженными элементами криволинейной формы, осуществляется следующим образом. Создается взаимосвязанное вращение с двумя степенями свободы вращательного движения кинематически сопряженных охватывающего и охватываемого элементов и звеньев синхронизации, создается или планетарное вращение одного из сопряженных элементов, или создается биротативное вращение обоих вышеупомянутых элементов, ограниченных взаимоогибающими поверхностями, выполненными на одном их сопряженных элементов в виде циклоиды или трохоиды, эквидистанты вышеупомянутых поверхностей, криволинейной поверхности, близкой к вышеупомянутым, либо в форме фрагментов вышеупомянутых поверхностей, а на другом в виде наружной или внутренней огибающей семейства вышеупомянутых криволинейных поверхностей и образующие рабочие /вытеснительные/ камеры.
На представленном иллюстрационном материале в качестве охватывающего и охватываемого элементв представлены соответственно ротор и статор объемной машины.
В качестве примера реализации способа представлена объемная машина, в которой охватываемый элемент выполнен в виде ротора 1 /фиг. 1/ трехугловой формы, профиль которого выполнен по внутренней огибающей, Z = 3, профиль рабочей полости охватывающего элемента - статора 5 выполнен по двухдуговой эпитрохоиде. Ротор 1 перемещают планетарно, т.е. с угловой скоростью ω по окружности на угол θ вокруг центра О по окружности, проходящей через Точку О1, а сам ротор вращают с угловой скоростью ω/3 вокруг своего центра О1 в направлении, совпадающем с перемещением его центра по окружности, так что его три вершины A1, A2, A3 скользят по эпитрохоиде статора, не отрываясь от нее. В планетарном режиме движения эпитрохоида статора 5 неподвижна.
Вводится дополнительная независимая степень свободы вращательного движения сопряженных элементов, например, осуществляют три вращательных движения, два из которых выбирают независимо, а именно при планетарном движении одного из сопряженных элементов осуществляют дополнительно вращение второго сопрягаемого элемента вокруг его оси, а при биротативном вращении обоих сопряженных элементов осуществляют дополнительно планетарное движение одного из сопряженных элементов вокруг оси другого элемента, при этом устанавливают начальную фазу и направление каждого из вращений, а величины угловых скоростей вращений вышеупомянутых сопряженных элементов выбирают в соответствии с зависимостями
где ω1 - угловая скорость вращения вокруг своей оси элемента, поверхность которого выполнена в форме вышеупомянутых криволинейных поверхностей, ω2 - угловая скорость вращения вокруг своей оси элемента, поверхность которого выполнена в форме внутренней или наружной огибающей семейства вышеупомянутых криволинейных поверхностей, ω3 - угловая скорость вращения звена синхронизирующей связи, ω0 - угловая скорость движения оси элемента, совершающего планетарное движение, K1, K2- постоянные коэффициенты связи, Z - число вершин огибающей вышеупомянутого семейства криволинейных поверхностей, любое целое число, большее 1, К - любое действительное число.
Добавляя к планетарному движению ротора биротативный вид движения, т.е. заставляем ротор и статор дополнительно вращаться вокруг своих центров О' и  в одном направлении, противоположном направлению планетарного движения ротора с угловыми скоростями - 2/3/ω /ротор/ и -ω /статор/.
в одном направлении, противоположном направлению планетарного движения ротора с угловыми скоростями - 2/3/ω /ротор/ и -ω /статор/.
Ротор в этом случае приобретает суммарную скорость собственного вращения вокруг своего центра, равную ω/3-2/3ω = -ω/3, и угол поворота ψ = -θ/n вокруг  центр ротора
центр ротора  сохранит свою скорость движения по окружности +ω и угол θ, а статор приобретает скорость -ω . Это говорит о том, что вершины
сохранит свою скорость движения по окружности +ω и угол θ, а статор приобретает скорость -ω . Это говорит о том, что вершины  треугольного ротора будут в этом случае описывать гипотрохоиду и скользить одновременно по вращающейся вокруг своего центра с угловой скоростью -ω эпитрохоиде статора, не отрываясь от нее. Цикл изменения одного замкнутого объема между ротором и статором уменьшается до - 45o угла поворота ротора вокруг своего центра или, что соответствует + 135o угла поворота центра ротора - и - 135o угла поворота корпуса вокруг центра эпитрохоиды, т.е. цикл сократился по сравнению с известным ближайшим планетарным аналогом с неподвижной эпитрохоидой и трехвершинным ротором в два раза /соответственно возросло в два раза количество циклов за оборот/, а по сравнению с биротативной вращательной схемой - в четыре раза, что свидетельствует о возможности интенсификации термодинамических циклов при таком преобразовании движения.
треугольного ротора будут в этом случае описывать гипотрохоиду и скользить одновременно по вращающейся вокруг своего центра с угловой скоростью -ω эпитрохоиде статора, не отрываясь от нее. Цикл изменения одного замкнутого объема между ротором и статором уменьшается до - 45o угла поворота ротора вокруг своего центра или, что соответствует + 135o угла поворота центра ротора - и - 135o угла поворота корпуса вокруг центра эпитрохоиды, т.е. цикл сократился по сравнению с известным ближайшим планетарным аналогом с неподвижной эпитрохоидой и трехвершинным ротором в два раза /соответственно возросло в два раза количество циклов за оборот/, а по сравнению с биротативной вращательной схемой - в четыре раза, что свидетельствует о возможности интенсификации термодинамических циклов при таком преобразовании движения.
Кроме того, центр ротора и статор вращаются в противоположных направлениях, т. е. контрроторно, что позволяет значительно уменьшить суммарный кинетический и реактивный моменты машины.
Цикл изменения рабочего объема в эпитрохоидной схеме с планетарным движением ротора /с внутренней огибающей/ с дополнительным вращением статора /эпитрохоиды/ на фиг. 1, равный 45o, может быть получен при Z = 3 и двухдуговой эпитрохоиде при различных угловых начальных фазах центра ротора и соотношениях угловых скоростей элементов и их центров, в частности, соотношений угловых скоростей вращения элементов вокруг своих центров к угловой скорости центра элемента, совершающего планетарное движение, т.е. ω1/ω0 и ω2/ω0
В частности, при внутренней огибающей ротора 1 и эпитрохоиде статора 5 или при исходной гипотрохоиде ротора 1 и внешней огибающей семейства трохоид статора 5 планетарное движение ротора 1 может быть описано соотношением eц.р.+1/Z ep, где eц.р. и ep - единичные орты векторов угловой скорости центра ротора 1 и ротора. Добавим к этому движению биротативное вращение, описываемое выражением
K eт.к.+K(Z-1)/Z ep, получим K eт.к+eц.р.+[1+K(Z-1)]/Z ep.
Из приведенного следует, что при выполнении поверхности элемента, совершающего планетарное движение, в форме внутренней или наружной огибающей семейства криволинейных поверхностей, а поверхности элемента, совершающего вращение вокруг своего неподвижного центра, в форме криволинейных поверхностей, отношения угловой скорости элемента, совершающего вращение вокруг своего неподвижного центра и угловой скорости вращения /вокруг своего центра/ элемента, совершающего планетарное движение, к угловой скорости движения центра элемента, совершающего планетарное движение, равны соответственно K и [(Z-1)K+1]/Z.
Так, например, Z = 3, планетарном движении охватываемого элемента ротора с внутренней огибающей и дополнительным вращением эпитрохоиды корпуса и ротора вокруг своих центров, имеем:
θ = 45°, K = -5, K1 = -5; K2 = -3; цикл γ = 45° поворота центра ротора.
θ = 135° K = - 1; K1 = -; K2 = -1/3; цикл γ = 45° поворота вокруг своего центра.
Предложенный способ преобразования движения в механизме с сопряженными элементами криволинейной формы осуществляется дифференциально связанным вращением этих элементов и звена синхронизирующей связи, причем скорости их вращения устанавливают в соответствии с зависимостью
K1ω1+K2ω2+ω3= 0,
где ω1,ω2/ - угловые скорости вращения вышеупомянутых элементов, ω3 - угловая скорость вращения звена синхронизации, К1, К2 - постоянные коэффициенты связи, при этом величины любых двух скоростей выбирают произвольно. При этакой зависимости, указывающей на наличие у механизма двух степеней свободы, он работает в качестве дифференциального механизма.
Возможны следующие варианты преобразование движения механизма: 1/ без передачи движения между охватывающим и охватываемым элементами, в этом случае их движения определяются звеньями синхронизации без взаимодействия самих сопряженных элементов; 2/ с передачей вращения взаимодействующими сопряженными элементами, в этом случае криволинейные поверхности охватывающего и охватываемого элементов приводят в механическое соприкосновение, образуя кинематическую пару, и осуществляют посредством последней передачу движения между охватывающим и охватываемым элементами.
В общем случае возможно осуществление кинематического сопряжения любого числа дополнительных охватывающих и охватываемых элементов, установленных в дополнительных устройствах синхронизации с возможностью вращательного и планетарного движений, при этом основные и дополнительные элементы могут быть расположены рядом и в полостях друг друга.
На фиг. 2 представлен пример реализации сопряжения шести криволинейных поверхностей четырех подвижных элементов. В этом варианте выполнения объемной машины на наружной поверхности охватывающего элемента - статора 5 выполнена дополнительная криволинейная поверхность 30. Причем, если внутренняя поверхность статора 5 выполнена в виде криволинейных поверхностей, то дополнительная наружная поверхность 30 охватывающего элемента - ротора 1 выполнена также в виде эквидистанты криволинейных поверхностей, а если внутренняя поверхность статора 5 выполнена в виде наружной огибающей семейства криволинейных поверхностей, то наружную поверхность ротора 1 выполняют в виде внутренней огибающей семейства криволинейных поверхностей. Дополнительно введен второй охватывающий элемент - ротор с поверхностями 27 и 31, коаксиально расположенный с первым охватываемым элементом - ротором 1. При этом внутренняя криволинейная поверхность 31 дополнительно охватывающего элемента выполнена сопряженной дополнительной пружиной поверхности 30 первого охватывающего элемента - статора 5.
В приведенном варианте некоторые элементы жестко соединены друг с другом. Так, один из элементов - статор 5 жестко соединен с дополнительным элементом с криволинейной поверхностью 30, эквидистантной поверхности элемента- статора 5, или с поверхностью, очерченной огибающей семейства криволинейных поверхностей; другой элемент с поверхностью 31 жестко соединен с другим дополнительным элементом, выполненным с поверхностью 27, при этом все элементы с поверхностями 30, 31, 27, 29 коаксиально установлены в полостях друг друга.
Способ преобразования движения в объемной машине по фиг. 2 осуществляется так же, как по фиг. 1, но с учетом одновременного кинематического взаимодействия трех пар сопряженных поверхностей.
Объемная машина, в которой реализован предложенный способ, представляет собой неподвижный корпус, содержащий охватывающий и охватываемый сопряженные элементы, выполненные соответственно в виде элементов с сопряженными поверхностями в форме циклоиды или трохоиды, или эквидистанты вышеупомянутых поверхностей, или криволинейной поверхности, близкой к вышеупомянутым, или в форме фрагментов названных поверхностей, при этом один из сопряженных элементов ограничен вышеупомянутой криволинейной поверхностью, а другой ограничен наружной или внутренней огибающей семейства вышеупомянутых криволинейных поверхностей, содержащий также корпус и устройство синхронизации - синхронизатор, механически связывающий между собой сопряженные элементы и неподвижный корпус. В этом механизме с двумя степенями свободы сопряженные элементы установлены с возможностью одновременного взаимосвязанного планетарного движения одного из вышеупомянутых элементов вокруг оси другого элемента и вращения шарнирно установленного в корпусе другого вышеупомянутого элемента вокруг своей оси.
Объемная машина снабжена дополнительным устройством синхронизации, дополнительно связывающим между собой: сопряженные элементы, основное устройство синхронизации и корпус.
На фиг. 3,4 схематично изображена двухстепенная трохоидная объемная машина, включающая охватывающий элемент в виде статора 5 с трохоидной внутренней поверхностью и плоскими торцевыми стенками /на чертеже не показаны/, неподвижный корпус 6, синхронизирующая связь - кривошип 7 с коренными шейками, шарнирно размещенными в неподвижном корпусе 6, охватываемый элемент в виде ротора 1 с криволинейной наружной поверхностью, размещенный шарнирно на коленной шейке кривошипа 7, синхронизирующий элемент, выполненный в виде параллельных кривошипов 22, коренные шейки которых шарнирно размещены в неподвижном корпусе 6, а коленные шейки шарнирно размещены в роторе 1, причем радиусы кривошипа 7 и кривошипов 22 выбраны равными, а статор 5 установлен шарнирно в неподвижном корпусе 6 с возможностью вращения вокруг своей оси и механически связан с дополнительным механизмом синхронизации. Кривошип 7 соединен со статором 5 и с коренными шейками параллельных кривошипов 22 через механизм передачи вращения, например, редуктор или мультипликатор, имеющий зубчатые колеса 23, 24, 25, 26. Ротор 1 выполнен по форме в виде трехугловой внутренней огибающей, а статор 5 - в виде двухдуговой трохоиды.
Работа в механизме происходит по схеме фиг.1, но с круговым поступательным движением ротора 1. При вращении кривошипа 7 кинематическая связь зубчатых колес 23, 24, 25, 26 обеспечивает вращение статора 5 с угловой скоростью, в два раза меньшей и в противоположном направлении по отношению к кривошипу 7. Ротор 1 благодаря параллельным кривошипам 22 совершает круговое поступательное движение. При Z = 3, трехугловом роторе 1 с внутренней огибающей и двухдуговой трохоиде статора 5 угловой цикл изменения замкнутых объемов равен γ = 90° по углу поворота статора 5, т.е. полный цикл, включающий четыре такта, работы объемной машины происходят за один оборот статора 5.
На фиг. 5 представлен вариант выполнения двухстепенной объемной машины, которая работает аналогично машине по фиг. 3, но в нем ротор 1 выполнен с наружной поверхностью в виде двухдуговой трохоиды, а статор 5 выполнен с внутренней поверхностью в виде трехдуговой наружной огибающей /Z=3/. В нем также ротор 1 размещен в кривошипе 22, обеспечивающем его круговое поступательное движение вокруг оси О, а статор 5 установлен шарнирно в корпусе с возможностью вращения. Однако в этом варианте ротор 1 и статор 5 образуют кинематическую пару, обеспечивающую самосинхронизацию, так как у него число формообразующих дуг /три/ на охватывающем элементе - статоре 5 больше, чем на охватываемом элементе - роторе 1, имеющем две дуги. В этом случае не требуется введение синхронизатора.
Объемная машина работает следующим образом.
При вращении кривошипа 7 /фиг.5/ ротор 1 совершает круговое поступательное движение в синхронизирующем элементе - системе параллельных кривошипов 22. При движении ротора 1 происходит самозацепление ротора 1 с внутренней поверхностью статора 5, вследствие чего статор 5 увлекается ротором 1 и вращается в ту же сторону, что и кривошип 7. Соотношение угловых скоростей вращения вала кривошипа 7 и статора 5 равно 3/1/.
В изменяющихся в процессе вращения вала кривошипа 7 замкнутых объемах между ротором 1, статором 5 и плоскими торцевыми стенками /не показаны/ могут быть осуществлены термодинамические циклы объемных машин. В частности, четырехтактный цикл двигателя внутреннего сгорания реализуется в механизме фиг. 5 за один оборот статора 5, что позволяет осуществлять газораспределение в замкнутых объемах представленной на фиг. 5 машины с помощью золотника /не показано/ на неподвижном корпусе.
На фиг. 7, 8 представлен другой вариант выполнения трохоидной машины с двумя степенями свободы, включающего двухдуговой статор 5 трохоидной формы с центром 0 и плоскими торцевыми стенками /не показаны/, трехдуговой ротор 1 с криволинейной поверхностью, установленный в полости статора 5, неподвижный корпус 6, механизм синхронизации движений ротора 1 и статора 5. Синхронизатор выполнен в виде параллельных кривошипов 22, коренные шейки которых шарнирно размещены в неподвижном корпусе 6, а коленные шейки шарнирно размещены в статоре 5, при этом статор имеет возможность совершать круговое поступательное движение, центр которого совмещен с осью О - О вала ротора 1, установленного шарнирно в неподвижном корпусе 6 с возможностью вращения вокруг своей оси О - О и кинематически связанного с синхронизирующим элементом в виде кривошипов 22 через механизм передачи вращения, например, редуктор или мультипликатор, имеющий зубчатые колеса 23, 24.
Работа объемной машины фиг. 7 проходит по схеме фиг.1, но при круговом поступательном движении статора 5. В этой машине при вращении ротора 1 зубчатые колеса 23,24 обеспечивают вращение коренных шеек одинарных кривошипов 22, жестко соединенных с зубчатыми колесами 24 с эксцентриситетом "e", с угловой скоростью, например, при Z=3, в три раза большей скорости вала ротора 1. Поскольку трохоидный корпус 5 шарнирно размещен, как в подвесе, в коленных шейках кривошипов 22, то при вращении кривошипов 22 статор 5 совершает круговое поступательное движение, что соответствует схеме фиг.1 в случае вращательного движения ротора 1 и кругового поступательного движения статора 5.
В вариантах выполнения машины, показанных на фиг. 3,5,7, выбор величины эксцентриситета "e" не влияет на величины диаметров синхронизирующих зубчатых колес 23,24,25, 26, что позволяет применять такие схемы при работе машины в режиме двигателя внутреннего сгорания с воспламенением сжатия, где величина e обычно мала.
На фиг 9,10 представлена трохоидная машина с двумя степенями свободы, включающая статор 5 трохоидной формы и плоскими торцевыми стенками /не показаны/, трехугловой ротор 1 с криволинейной наружной поверхностью, неподвижный корпус 6, синхронизирующую связь, выполненную в виде кривошипа 7, коренные шейки которого шарнирно размещены в неподвижном корпусе 6 с возможностью вращения, и пары зубчатых колес 3 и 4, находящихся в постоянном зацеплении, одно из которых соединено с ротором 1, а другое - со статором 5, дополнительный механизм синхронизации - синхронизатор, выполненный в виде зубчатых колес 2 и 8, последнее из которых -внутреннего зацепления, соединено с неподвижным корпусом 6, а другое - внешнего зацепления, установлено на роторе 1. Подвижные трохоидный статор 5, трехугловой ротор 1 на эксцентрике, два зубчатых колеса 2 и 3 на роторе 1, зубчатое колесо 4 на трохоидном статоре 5 и неподвижное зубчатое колесо 8 образуют контрроторную трохоидную объемную машину.
Работа трохоидной объемной машины происходит следующим образом. При вращении эксцентрикового вала кривошипа 7 зубчатое колесо 2 ротора 1 обкатывается по внутренней поверхности неподвижного зубчатого колеса 8 и заставляет ротор 1 совершать планетарное движение. Зубчатое колесо 3 вращает зубчатое колесо 4 трехоидного статора 5, который вращается контрроторно по отношению к валу кривошипа 7. Изменения рабочих объемов камер между ротором 1, статором 5 и плоскими торцевыми стенками статора 5 происходят в два раза чаше, чем в прототипе, а вершины ротора описывают гипотрохоиду и одновременно скользят по эпитрохоиде.
В данном случае использован синхронизатор, выполненный в виде пары зубчатых колес 2 и 8. Возможно выполнение синхронизатора в виде кулисного механизма с вращающейся кулисной или инвертора направления вращения /не показаны/.
Ротор 1 и статор 5 в других вариантах выполнения объемной машины могут быть выполнены в виде элементов цевочного зацепления, колеса с цилиндрическими цевками и зубчатого колеса с циклоидальной огибающей.
В общем случае два вращающихся элемента трохоидной машины, в том числе с контрроторным вращением, могут быть связаны посредством передаточных механизмов с вращающимися элементами внешних устройств или механизмов, при этом передача вращающихся моментов может осуществляться как от трохоидной машины к внешнему устройству, так и в обратном направлении. Такая связь может осуществляться, например, с контрроторной турбиной, компрессором или контрроторной электрической машиной.
Трохоидная машина может быть снабжена золотником, установленным с возможностью скольжения по торцевой или цилиндрической поверхности одного из сопряженных элементов /не показан/.
Преимущество изобретения заключается в уменьшении угловой протяженности термодинамических циклов, уменьшении махового результирующего момента и реакции на опорах машины, улучшении литровых удельных показателей машины при реализации двухстепенного контрроторного и других вариантов способа работы объемной машины и двухстепенной объемной машины по изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2134795C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В КУЛИСНОМ МЕХАНИЗМЕ И КУЛИСНЫЙ МЕХАНИЗМ ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2133832C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВО ВРАЩАТЕЛЬНОЙ ВИНТОВОЙ МАШИНЕ ОБЪЕМНОГО ТИПА | 2004 |
|
RU2331770C2 |
| ВРАЩАЮЩАЯСЯ ШНЕКОВАЯ МАШИНА И СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В НЕЙ | 2003 |
|
RU2336437C2 |
| РОТОРНАЯ ВИНТОВАЯ МАШИНА ОБЪЕМНОГО ТИПА И СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В ОБЪЕМНОЙ ВИНТОВОЙ МАШИНЕ | 2003 |
|
RU2336436C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2602938C1 |
| ОБЪЕМНАЯ МАШИНА | 2004 |
|
RU2267613C1 |
| Объемная роторная машина | 1983 |
|
SU1240934A1 |
| ОБЪЕМНАЯ МАШИНА | 2001 |
|
RU2199668C1 |
| УСТРОЙСТВО ОБЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2006 |
|
RU2322587C1 |
Способ преобразования движения в машине объемного расширения (вытеснения) и объемная машина могут быть использованы в редукторостроении, моторостроении, компрессоростроении, насосостроении и т.д., в таких механизмах, как редукторы, дифференциалы, инверторы и т.д., в таких машинах, как двигатели внутреннего сгорания, насосы, компрессоры и т.д. Способ преобразования движения в машине объемного расширения (вытеснения) заключается в том, что осуществляют дифференциально связанные вращения двух вышеупомянутых сопряженных элементов вокруг своих осей и звена синхронизирующей связи, два вращения из упомянутых выше являются независимыми друг от друга, причем угловые скорости вращений определяют из определенного соотношения. Одновременно с вращением сопряженных элементов вокруг своих осей осуществляют дополнительно планетарное вращение любого из сопряженных элементов вокруг оси другого элемента, а величины угловых скоростей вращений сопряженных элементов выбирают также из определенного соотношения. Особенностью выполнения машины объемного расширения (вытеснения) является то, что синхронизатор установлен в корпусе с возможностью вращения относительно основной оси, при этом по меньшей мере один из сопряженных элементов и синхронизатор или по меньшей мере два сопряженных элемента связаны между собой с образованием кинематической цепи, установленной с возможностью синхронизации вращений двух сопряженных элементов вокруг своих осей или вращения одного из сопряженных элементов вокруг своей оси и вращения оси сопряженного элемента, совершающего планетарное вращение, вокруг основной оси в соответствии с определенным соотношением. Обеспечивается возможность увеличения числа рабочих циклов за один оборот приводного вала. 2 с. и 11 з.п.ф-лы, 10 ил.
K1ω1+K2ω2+ω3= 0,
где ω1,ω2 - угловые скорости вращения вокруг своих осей вышеупомянутых сопряженных элементов;
ω3 - угловая скорость вращения звена синхронизирующей связи;
K1, K2 - постоянные коэффициенты связи,
при этом одновременно с вращением сопряженных элементов вокруг своих осей осуществляют дополнительно планетарное вращение любого из сопряженных элементов вокруг оси другого элемента, а величины угловых скоростей вращения сопряженных элементов выбирают из соотношения
(z-1)ω1-zω2+ω0= 0,
где ω1 - угловая скорость вращения вокруг своей оси элемента, поверхность которого выполнена в виде криволинейной поверхности;
ω2 - угловая скорость вращения вокруг своей оси элемента, поверхность которого выполнена в форме внутренней или наружной огибающей семейства поверхностей, образованного с помощью вышеупомянутой криволинейной поверхности;
ω0 - угловая скорость движения оси элемента, совершающего планетарное вращение;
z - целое число, z > 1.
K1ω1+K2ω2+ω0= 0,
ω1,ω2 - угловые скорости вращения вокруг своих осей вышеупомянутых сопряженных элементов;
ω0 - угловая скорость вращения оси элемента, совершающего планетарное движение;
K1, K2 - постоянные коэффициенты связи, при этом два из трех вышеупомянутых вращений ω0,ω1,ω2 независимы друг от друга.
| Способ получения гранул проппанта | 2019 |
|
RU2719874C1 |
| Сухомлинов Р.М | |||
| Трохоидные роторные компрессоры | |||
| - Харьков: Вища школа, 1975, с.70, 71 | |||
| Роторный насос | 1988 |
|
SU1681050A1 |
| Роторный насос | 1987 |
|
SU1694986A1 |
| РОТОРНО-ПОРШНЕВОЙ КОМПРЕССОР | 0 |
|
SU357371A1 |
