Изобретение относится к области электротехники и средствам автоматики и может быть использовано в качестве задатчика регулируемых перемещений преимущественно для прецизионного позиционирования исполнительных элементов приборов, машин и механизмов.
Известен способ управления магнитомеханическим преобразователем, включающим магнитную систему, сердечник, выполненный из магнитострикционного материала, а также исполнительный элемент, заключающийся в осуществлении процесса изменения координаты положения центра масс исполнительного элемента посредством создания в зоне сердечника основного магнитного поля и, по меньшей мере, однократного изменения величины напряженности основного магнитного поля в пределах от нулевого значения до значения напряженности, обеспечивающей магнитострикцию технического насыщения материала сердечника в направлении этого, основного магнитного поля, и последующем сохранении во времени технологически заданного положения координаты центра масс исполнительного элемента.
К основным недостаткам известного технического решения следует отнести высокое энергопотребление в процессе эксплуатации. Объясняется это тем, что использование в известном магнитомеханическом преобразователе источника магнитного поля в виде электрической обмотки возбуждения требует в процессе управления объектом постоянного электропотребления не только для осуществления процесса изменения координаты положения центра масс исполнительного элемента, но и для сохранения во времени технологически заданного положения координаты центра масс исполнительного элемента, что в значительной мере повышает расход электроэнергии в процессе эксплуатации.
Наиболее явно указанный недостаток проявляется в тех, наиболее часто встречающихся, условиях эксплуатации, где временной период процесса сохранения технологически заданного положения координаты центра масс исполнительного элемента в десятки раз превышает временной период процесса технологического изменения координаты положения упомянутого центра масс, так как в этом случае основная часть энергозатрат приходится именно на первый из упомянутых процессов, т. е. процесс сохранения во времени координаты технологически заданного положения центра масс исполнительного элемента.
Более того, для упомянутого известного технического решения характерен дополнительный нагрев магнитной системы и материала сердечника, что приводит к необходимости создания сложной управляемой (следящей) системы охлаждения и температурной компенсации изменения линейных размеров сердечника. Это является причиной увеличения массогабаритных показателей устройства в целом и не позволяет обеспечить достаточную точность при использовании известного способа управления данным известным магнитомеханическим преобразователем в системах прецизионного позиционирования.
В основу изобретения была положена задача создания такого способа управления магнитомеханическим преобразователем, конструктивные особенности которого позволили бы осуществлять управление данным магнитомеханическим преобразователем с минимальными энергозатратами за счет снижения энергопотребления в процессе изменения координаты положения центра масс исполнительного элемента и полного исключения энергопотребления от внешнего источника электроэнергии в процессе сохранения во времени технологически заданного положения координаты центра масс исполнительного элемента.
Решение поставленной задачи достигается тем, что в способе управления магнитомеханическим преобразователем, включающим магнитную систему, сердечник, выполненный из магнитострикционного материала, а также исполнительный элемент, осуществляют процесс изменения координаты положения центра масс исполнительного элемента посредством создания в зоне сердечника основного магнитного поля и, по меньшей мере, однократного изменения величины напряженности этого магнитного поля в пределах от нулевого значения до значения напряженности, обеспечивающей магнитострикцию технического насыщения материала сердечника в направлении этого основного магнитного поля, и сохраняют во времени заданное положение координаты центра масс исполнительного элемента, при этом согласно изобретению в зоне сердечника создают вспомогательное постоянное магнитное поле со значением напряженности, меньшим напряженности магнитного поля технического насыщения материала сердечника в направлении этого, вспомогательного, магнитного поля, основное магнитное поле в зоне сердечника создают в виде не совмещенных во времени импульсов основного магнитного поля, проекции векторов напряженности которых на ось сердечника, совпадающую с направлением перемещения исполнительного элемента, направлены в противоположные стороны, а сохранение во времени заданных положений центра масс исполнительного элемента осуществляют при нулевой напряженности основного магнитного поля в зоне сердечника в период времени между упомянутыми импульсами основного магнитного поля и в пределах максимального остаточного изменения линейного размера сердечника, возникающего вследствие наличия в материале сердечника гистерезиса магнитострикции, лимитируемого напряженностью вспомогательного постоянного магнитного поля.
Оптимально не совмещенные во времени импульсы основного магнитного поля создают таким образом, чтобы векторы напряженности основного магнитного поля в этих импульсах были расположены параллельно друг другу.
В ряде конкретных случаев целесообразно до начала осуществления процесса изменения координаты положения центра масс исполнительного элемента создавать в сердечнике механическим путем предварительное напряжение вдоль оси сердечника, совпадающей с направлением перемещения исполнительного элемента, причем знак упомянутого предварительного механического напряжения в сердечнике должен совпадать со знаком магнитострикции материала сердечника.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного объекта изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующихся признаками, идентичными всем существенным признакам заявленного изобретения, а выбранный из перечня выявленных аналогов прототип, как наиболее близкий по совокупности признаков аналог, позволил выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует критерию патентоспособности "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию критерия патентоспособности "изобретательский уровень" заявитель провел дополнительный поиск известных технических решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижение усматриваемого заявителем технического результата. В частности, заявленным изобретением не предусматриваются следующие преобразования известного объекта-прототипа:
дополнение известного объекта каким-либо известным признаком, присоединяемым к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно таких дополнений;
замена какого-либо признака известного объекта другим известным признаком для достижения технического результата, в отношении которого установлено влияние именно такой замены;
исключение какого-либо признака известного объекта с одновременным исключением обусловленной наличием этим признаком функции и достижением при этом обычного (известного из уровня техники) для такого исключения результата;
увеличение количества однотипных признаков в известном объекте для усиления технического результата, обусловленного наличием в данном объекте именно таких признаков;
создание объекта, включающего известные признаки, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами вышеупомянутых признаков этого объекта и связей между ними.
Следовательно, заявленное изобретение соответствует требованию критерия патентоспособности "изобретательский уровень" по действующему законодательству.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
объект, воплощающий заявленное изобретение при его осуществлении, предназначен для использования в промышленности, а именно в области электротехники и средств автоматики;
для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных на дату приоритета средств и методов;
объект, воплощающий заявленное изобретение при его осуществлении, способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию критерия патентоспособности "промышленная применимость" по действующему законодательству.
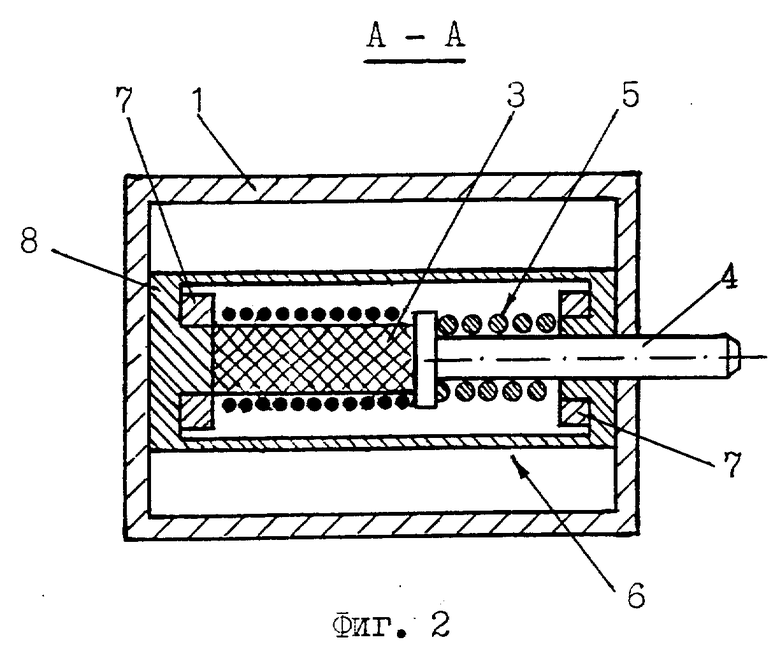
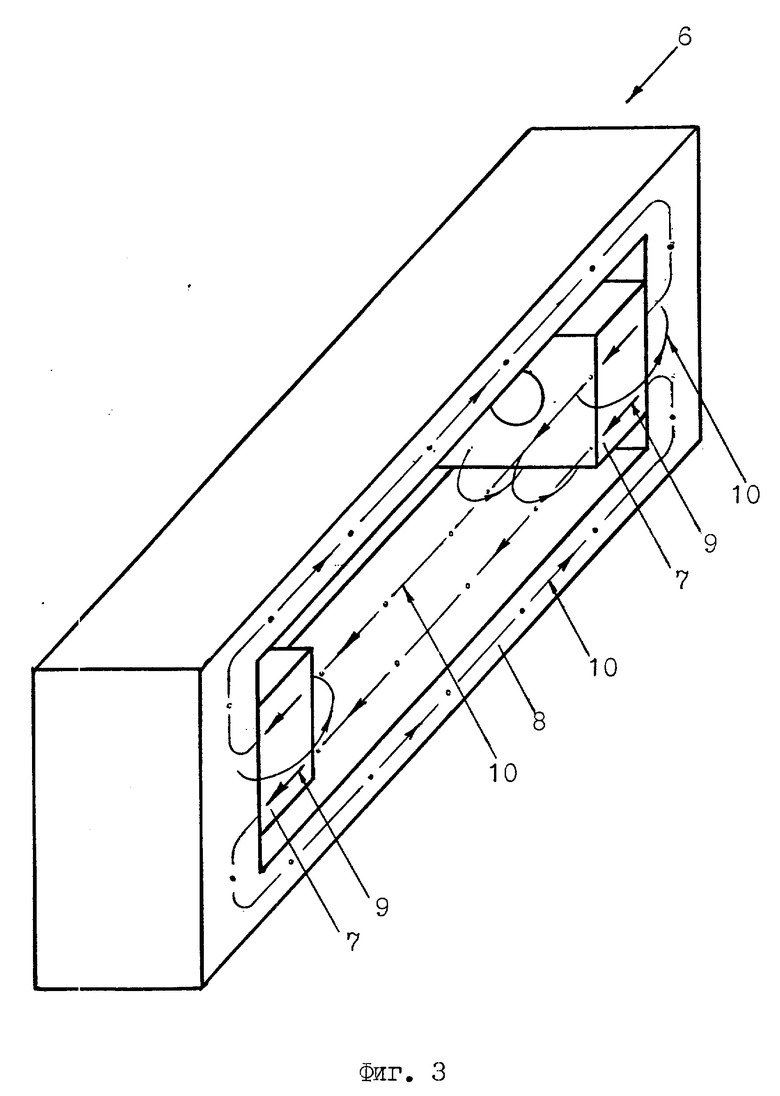
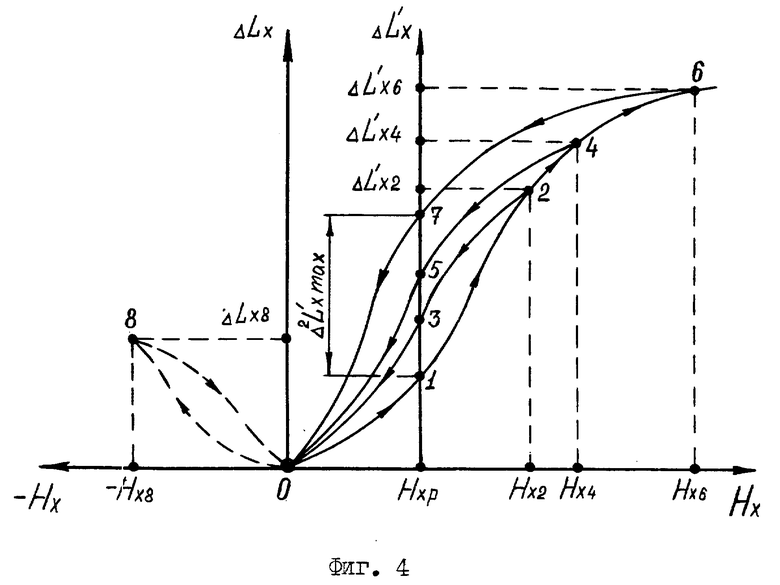
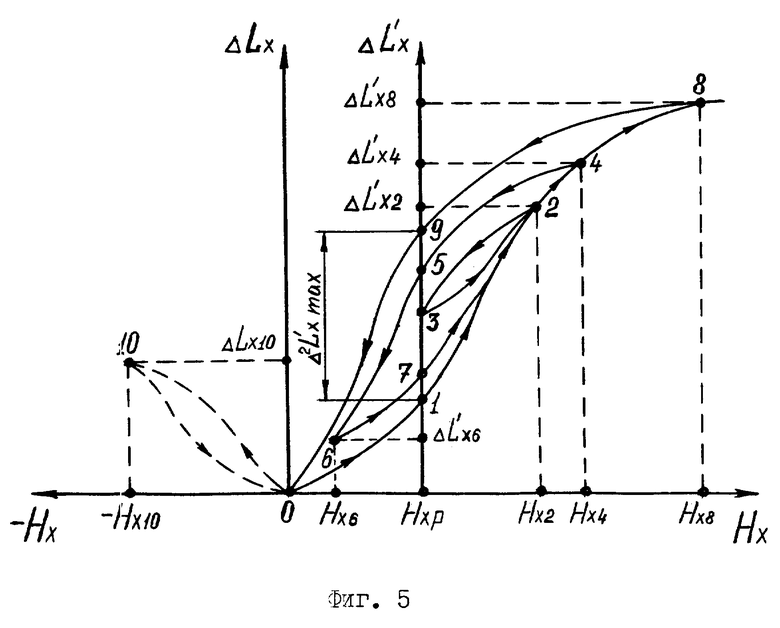
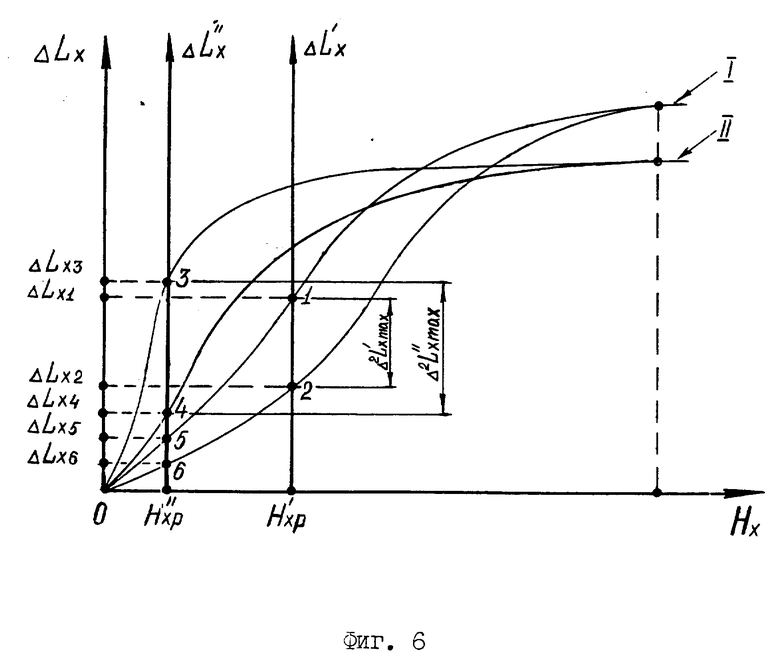
На фиг. 1 изображен один из возможных конструктивных вариантов выполнения магнитомеханического преобразователя, обеспечивающих практическую реализацию патентуемого способа управления; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 показан один из возможных вариантов выполнения вспомогательного источника постоянного магнитного поля магнитной системы; на фиг. 4 и 5 графически показаны петли гистерезиса зависимости магнитострикционного изменения длины сердечника или, что равнозначно, изменения координаты центра масс исполнительного элемента от напряженности основного магнитного поля в зоне сердечника при наличии вспомогательного магнитного поля для некоторых возможных (согласно общему принципу управления в соответствии с п.1 формулы изобретения) вариантов осуществления управления патентуемым магнитомеханическим преобразователем; на фиг. 6 показано изменение крутизны петли гистерезиса зависимости магнитострикционного изменения длины сердечника, который находится в предварительно напряженном (сжатом или растянутом) состоянии по отношению к ненапряженному состоянию сердечника, от напряженности основного магнитного поля в сердечнике.
Величина магнитострикционного сердечника вдоль оси X, совпадающей с направлением перемещения исполнительного элемента, строго соответствует изменению координаты центра масс исполнительного элемента вследствие наличия между сердечником и исполнительным элементом жесткой кинематической связи.
На основании этого все дальнейшие рассуждения в части осуществления способов управления магнитомеханическим преобразователем целесообразно производить применительно к изменению координаты положения центра масс исполнительного элемента.
Конкретный пример реализации способа управления магнитомеханическим преобразователем раскрывается применительно к варианту конкретного выполнения магнитомеханического преобразователя, изображенного на фиг. 1 и 2.
Данный магнитомеханический преобразователь содержит корпус 1, установленные в корпусе 1 магнитную систему с электрически соединенным с источником тока (который на фигурах не показан) основным управляемым источником 2 магнитного поля, сердечник 3, а также исполнительный элемент 4, выполненный преимущественно из магнитного материала, кинематически связанный с сердечником 3 с возможностью перемещения относительно корпуса 1 и подпружиненный относительно корпуса 1 посредством упругого элемента 5. Кроме того, магнитная система включает в себя вспомогательный источник 6 постоянного магнитного поля, выполненный, например, в виде по меньшей мере одного постоянного магнита 7. Основной управляемый источник 2 магнитного поля магнитной системы расположен с возможностью создания в зоне сердечника 3 основного магнитного поля в виде не совмещенных во времени импульсов основного магнитного поля, проекции векторов напряженности которых на ось сердечника 3, совпадающую с направлением перемещения исполнительного элемента 4, направлены в противоположные стороны.
Принципиальная схема коммутативной электрической связи основного источника 2 магнитного поля с источником питания (обеспечивающая вышеупомянутое создание в зоне сердечника 3 основного магнитного поля в виде не совмещенных во времени импульсов основного магнитного поля, проекции векторов напряженности которых на ось сердечника 3, совпадающую с направлением перемещения исполнительного элемента 4, направлены в противоположные стороны) в графических материалах не показана, поскольку она может быть реализована посредством общеизвестных из уровня техники устройств (см. Политехнический словарь. /Под ред. академика И.И. Артоболевского. М. Советская энциклопедия, 1976 г. стр. 219, 220, 227, 423, 424), и не является объектом патентования в рамках настоящей заявки на изобретение.
Кроме того, на фиг. 3 векторы 9 намагниченности постоянных магнитов 7 и линии 10 магнитной индукции магнитного поля, генерируемого вспомогательным источником 6 постоянного магнитного поля, показаны сплошными и штрихпунктирными соответственно стрелками.
До начала осуществления способа управления магнитомеханическим преобразователем согласно настоящему изобретению целесообразно предварительно (т. е. перед началом эксплуатации), экспериментальным путем определить оптимальное (для конкретных условии эксплуатации) положение сердечника 3 в окружном направлении относительно его продольной геометрической оси, совпадающей с направлением перемещения исполнительного элемента 4, и закрепить сердечник 3 в искомом, оптимальном положении перед началом реализации патентуемого способа управления магнитомеханическим преобразователем. Это позволяет обеспечить максимальный диапазон перемещений исполнительного элемента 4.
Непосредственно способ управления магнитомеханическим преобразователем согласно настоящему изобретению (в соответствии с общим физическими принципами его осуществления) заключается в следующем.
В магнитомеханическом преобразователе, включающем магнитную систему, сердечник 3, выполненный из магнитострикционного материала, а также исполнительный элемент 4, осуществляют следующую совокупность операций: изменение координаты положения центра масс исполнительного элемента 4 посредством создания в зоне сердечника 3 основного магнитного поля; по меньшей мере, однократное изменение величины напряженности этого основного магнитного поля в пределах от нулевого значения до значения напряженности, обеспечивающей магнитострикцию технического насыщения материала сердечника 3 в направлении этого, основного магнитного поля; сохранение во времени заданного положения координаты центра масс исполнительного элемента 4.
При этом в зоне сердечника 3 создают (посредством вспомогательного источника 6 постоянного магнитного поля) вспомогательное постоянное магнитное поле со значением напряженности, меньшим напряженности магнитного поля технического насыщения материала сердечника 3 в направлении этого, вспомогательного постоянного магнитного поля.
Основное магнитное поле в зоне сердечника 3 создают (посредством управляемого основного источника 2 магнитного поля) в виде не совмещенных во времени импульсов основного магнитного поля, проекции векторов напряженности которых на ось сердечника 3, совпадающую с направлением перемещения исполнительного элемента 4, направлены в противоположные стороны.
Сохранение во времени заданных положений центра масс исполнительного элемента 4 осуществляют при нулевой напряженности основного магнитного поля в зоне сердечника 3 в период времени между упомянутыми импульсами основного магнитного поля и в пределах величины Δ2L
Наиболее оптимально основное магнитное поле в зоне сердечника создавать в виде не совмещенных во времени импульсов параллельных между собой магнитных полей. Это обеспечивает упрощение конструкции магнитомеханического преобразователя и соответственно упрощение управления, поскольку импульсы основного магнитного поля в этом случае можно создавать посредством, например, одного соленоида.
Кроме того, целесообразно до начала осуществления процесса изменения координаты положения центра масс исполнительного элемента 4 в сердечнике 3 создавать механическим путем предварительное напряжение вдоль оси сердечника 3, совпадающей с направлением перемещения исполнительного элемента 4. Причем знак упомянутого предварительного механического напряжения в сердечнике 3 должен совпадать со знаком магнитострикции материала сердечника 3. Это позволяет в значительной степени увеличить диапазон перемещений исполнительного элемента 4 при минимальном значении напряженности вспомогательного магнитного поля, генерируемого вспомогательным источником 6 магнитного поля.
Более подробное описание патентуемого способа управления магнитомеханическим преобразователем и его различных типовых вариаций управления рассматривается ниже с отсылками на конкретное конструктивное исполнение магнитомеханического преобразования по фиг.1 и 2, обеспечивающего реализацию данного способа управления в процессе эксплуатации.
Магнитомеханическим преобразователем согласно варианту конструктивного исполнения по фиг.1 и 2 управляют следующим образом.
В исходном состоянии центр масс исполнительного элемента 4 находится в неопределенном положении, т. е. его координата может соответствовать любой произвольной точке в пределах отрезка 1-7 (см. фиг. 4), соответствующего величине Δ2L
Например, координата центра масс исполнительного элемента 4 соответствует точке 7.
Для осуществления перемещения центра масс исполнительного элемента 4 из положения, соответствующего точке 7, в положение, соответствующее точке 1, в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля создают импульс основного магнитного поля с величиной напряженности, равной напряженности -Hxp (или -Hxp-Hx8, не меньшей по своему абсолютному значению значения напряженности Hxp) вспомогательного постоянного магнитного поля, генерируемого в зоне сердечника 3 посредством вспомогательного источника 6 постоянного магнитного поля. При этом суммарная напряженность магнитного поля в зоне сердечника будет равна соответственно нулевому значению (или величине -Hx8).
При данном значении суммарной напряженности магнитного поля центр масс исполнительного элемента 4 переместится в положение, соответствующее точке 0 (или соответственно точке 8).
После уменьшения в зоне сердечника 3 основного магнитного поля (обеспечиваемого импульсом магнитного поля посредством основного управляемого источника 2 магнитного поля) до нулевого значения, т.е. при напряженности магнитного поля в зоне сердечника 3, равной напряженности Hxp вспомогательного постоянного магнитного поля, центр масс исполнительного элемента 4 самопроизвольно (в результате наличия в зоне сердечника 3 постоянного магнитного поля, генерируемого вспомогательным источником 6 магнитного поля) перемещается в положение, соответствующее точке 1, и будет находиться в этом фиксированном положении (т.е. в положении, соответствующем точке 1) неограниченно долгий промежуток времени.
На фиг.4 циклу перехода центра масс исполнительного элемента 4 из положения, соответствующего точке 7, в положение, соответствующее точке 1, через положение, соответствующее точке 0 (или положение, соответствующее точке 8), соответствует криволинейный отрезок 7-0-1 (или 7-0-8-0-1) соответственно петли гистерезиса изменения линейного размера сердечника 3 (соответствующего изменению координаты центра масс исполнительного элемента).
Цикл перемещения центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положение, соответствующее точке 3, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного направления по отношению к предыдущему импульсу основного магнитного поля) с величиной напряженности Hx2-Hxp. При этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению Hx2. При данном значении (Hx2) суммарной напряженности магнитного поля в зоне сердечника 3 центр масс исполнительного элемента 4 переместится в точку с координатой ΔL
После уменьшения в зоне сердечника 3 напряженности основного магнитного поля (обеспечиваемого импульсом основного магнитного поля посредством основного управляемого источника 2 магнитного поля) до нулевого значения, т.е. при суммарной напряженности магнитного поля в зоне сердечника 3, равной значению Hxp напряженности вспомогательного постоянного магнитного поля, центр масс исполнительного элемента 4 самопроизвольно перемещается в положение, соответствующее точке 3, и будет находиться в этом фиксированном положении (т.е. в положении, соответствующем точке 3) неограниченно долгий промежуток времени.
На фиг. 4 циклу перемещения центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положение, соответствующее точке 3 (через точку 2 с координатой ΔL
Процесс осуществления возврата центра масс исполнительного элемента 4 из положения, соответствующего точке 3, в положение, соответствующее точке 1 (исходное положение), осуществляется абсолютно идентично вышеописанному циклу перехода центра масс из положения, соответствующего точке 7, в положение, соответствующее точке 1 (т.е. через положение, соответствующее точке 0, или положение, соответствующее точке 8, с координатой ΔLx8) при создании в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного направления по отношению к предыдущему импульсу основного магнитного поля) с величиной напряженности -Hxp (или -Hx8-Hxp) и изменении значения напряженности этого импульса основного магнитного поля до нулевого значения. При этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна соответственно нулю или значению -Hx8, а затем увеличится до значения -Hxp.
На фиг. 4 циклу перехода центра масс исполнительного элемента 4 из положения, соответствующего точке 3, в положение, соответствующее точке 1, через положение, соответствующее точке 0 (или положение, соответствующее точке 8 с координатой ΔLx8) соответствует криволинейный отрезок 3-0-1 (или 3-0-8-0-1) соответственно петли гистерезиса изменения линейного размера сердечника 3 (или соответственно изменения координаты центра масс исполнительного элемента 4).
Процессы перемещения центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положения, соответствующие точкам 5 и 7, а также возврат упомянутого центра масс в исходное положение (положение, соответствующее точке 1) с физической точки зрения осуществляются аналогично вышеописанным циклам перемещения центра масс из положения, соответствующего точке 1, в положение, соответствующее точке 3, и его возврата из положения, соответствующего точке 3, в исходное положение (положение, соответствующее точке 1) соответственно. А именно
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положение, соответствующее точке 5, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного направления по отношению в предыдущему импульсу основного магнитного поля) с величиной Hx4 -Hxp напряженности и уменьшения напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению Hx4, а затем уменьшится до значения Hxp; указанный цикл осуществляется через положение, соответствующее точке 4 (с координатой ΔL
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положение, соответствующее точке 7, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного направления по отношению к предыдущему импульсу основного магнитного поля) с величиной Hx6-Hxp напряженности и уменьшения напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению -Hx6 а затем уменьшится до Hxp; указанный цикл осуществляется через положение, соответствующее точке 6 (с координатой ΔL
Таким образом, полный цикл перемещения центра масс исполнительного элемента 4 из положения, соответствующего точке 7, в положение, соответствующее точке 1, и обратно завершается, после чего может быть осуществлен неограниченное число раз повторно, причем величина шага перемещения центра масс (в пределах величины Δ2L
На фиг. 5 показана еще одна схема управления конструктивным вариантом выполнения магнитомеханическим преобразователем по фиг. 1 и 2, которая является более экономичной по сравнению со схемой управления по фиг. 4 и которая может быть использована в тех случаях, когда определяющим принципом управления магнитомеханическим преобразователем является лишь величина перемещения центра масс исполнительного элемента 4 безотносительно к какому-либо начальному (исходному) положению упомянутого центра масс.
То есть, согласно данной схеме управления для осуществления перемещения центра масс исполнительного элемента 4 (в пределах величины Δ2L
Управление магнитомеханическим преобразователем согласно схеме управления по фиг. 5 осуществляется следующим образом:
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положение, соответствующее точке 3, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля с величиной Hx2-Hxp напряженности и уменьшения напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению Hx2, а затем уменьшится до значения Hxp; указанный цикл осуществляется через положение, соответствующее точке 2 (с координатой ΔL
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 3, в положение, соответствующее точке 5, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля с величиной Hx4-Hxp напряженности и уменьшения величины напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению Hx4, а затем уменьшится до значения Hxp; указанный цикл осуществляется через положение, соответствующее точке 4 (с координатой ΔL
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 5, в положение, соответствующее точке 7, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного по направлению относительно вектора напряженности предыдущего импульса основного магнитного поля) с величиной Hx6-Hxp напряженности и изменения величины напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению Hx6, а затем увеличится до значения Hxp; указанный цикл осуществляется через положение, соответствующее точке 6 (с координатой ΔL
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 7, в положение, соответствующее точке 9, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного по направлению по отношению к вектору напряженности предыдущего импульса основного магнитного поля) с величиной Hx8-Hxp напряженности (не меньшей величины напряженности магнитного поля технического насыщения материала сердечника 3) и уменьшения напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна значению Hx8, а затем уменьшится до значения Hxp; указанный цикл осуществляется через положение, соответствующее точке 8 (с координатой ΔL
перемещение центра масс исполнительного элемента 4 из положения, соответствующего точке 9, в положение, соответствующее точке 1, осуществляется за счет создания в зоне сердечника 3 посредством основного управляемого источника 2 магнитного поля импульса основного магнитного поля (противоположного по направлению по отношению к вектору напряженности предыдущего импульса основного магнитного поля) с величиной -Hxp (или -Hx10-Hxp, не меньшей по абсолютному значению величины Hxp) напряженности и уменьшения величины напряженности этого импульса основного магнитного поля до нулевого значения, при этом суммарная величина напряженности магнитного поля в зоне сердечника 3 будет равна соответственно нулю или значению -Hx10, а затем увеличится до значения Hxp; указанный цикл осуществляется через положение, соответствующее точке 0 (или точке 10 с координатой ΔLx10) соответственно, и характеризуется криволинейным участком 9-0-1 (или 9-0-10-0-1) соответственно петли гистерезиса.
Таким образом, полный цикл перемещения центра масс исполнительного элемента 4 из положения, соответствующего точке 1, в положение, соответствующее точке 9, и обратно завершается, после чего может быть осуществлен неограниченное число раз повторно, причем величина шага перемещения центра масс исполнительного элемента 4 (в пределах величины Δ2L
Следует также отметить, что в варианте конструктивного выполнения магнитомеханического преобразователя по фиг. 1 и 2, согласно которому в зоне сердечника 3 создается (посредством вспомогательного источника постоянного 6 магнитного поля) постоянное вспомогательное магнитное поле подмагничивания, целесообразно обеспечивать (например, механическим путем) предварительно напряженное состояние сердечника 3.
в этом случае появляется возможность дополнительно искусственно увеличить величину Δ2L
То есть, на фиг. 6 показаны петли I и II гистерезиса магнитострикционного изменения линейного размера сердечника 3 в ненапряженном и предварительно напряженном состояниях соответственно, величины Δ2L
Из данной иллюстрации видно, что величина Δ2L
Однако необходимо учитывать, что при создании в сердечнике 3 предварительных напряжений должны быть соблюдены следующие условия:
при выполнении сердечника 3 из материала с положительной магнитострикцией в нем создают предварительное напряжение растяжения;
при выполнении сердечника 3 из материала с отрицательной магнитострикцией в нем создают предварительное напряжение сжатия.
Таким образом, патентуемое изобретение может быть использовано в области электротехники и средств автоматики, а именно может быть использовано, например, в качестве задатчика регулируемых перемещений для прецизионного позиционирования исполнительных элементов приборов, машин и механизмов, в том числе в прецизионных манипуляторах, в адаптивной оптике, для управления перемещением лазерного луча в обрабатывающих центрах, для перемещения обрабатывающего инструмента в станках, перемещения ножа микротома, поворота образца в прецизионных кристаллографических рентгеновских установках, перемещения иглы в туннельном микроскопе, перемещения предметного стола в туннельном и электронном микроскопах, в прецизионных дозаторах, в клапанах для управления расходом газообразных и жидких химических реагентов, при изготовлении шаблонов гибридных микросхем, в клапанах гидравлических и пневматических систем и прочих приборах, механизмах и устройствах, требующих обеспечения высокой точности позиционирования исполнительных органов.
Изобретение относится к области электротехники и средствам автоматики и может быть использовано в качестве задатчика регулируемых перемещений. Сущность изобретения: способ управления магнитомеханическим преобразователем, включающим магнитную систему, сердечник, выполненный из магнитострикционного материала, а также исполнительный элемент (ИЭ), предусматривает выполнение следующих операций: осуществление процесса изменения положения центра масс ИЭ за счет создания в зоне сердечника основного магнитного поля; по меньшей мере, однократное изменение напряженности основного магнитного поля в пределах от нулевого значения до значения, обеспечивающего магнитострикцию технического насыщения материала сердечника в направлении основного магнитного поля; сохранение во времени заданного положения центра масс ИЭ. При этом предварительно в зоне сердечника создают вспомогательное постоянное магнитное поле со значением напряженности, меньшим напряженности магнитного поля технического насыщения материала сердечника в направлении вспомогательного магнитного поля. Основное магнитное поле создают в виде не совмещенных во времени импульсов основного магнитного поля, проекции векторов напряженности которых на ось сердечника, совпадающую с направлением перемещения ИЭ, направлены в противоположные стороны. А сохранение во времени заданных положений центра масс ИЭ осуществляют при нулевой напряженности основного магнитного поля в период времени между упомянутыми импульсами основного магнитного поля и в пределах величины максимального остаточного магнитострикционного изменения линейного размера сердечника, лимитируемого величиной напряженности вспомогательного магнитного поля. 2 з.п. ф-лы, 6 ил.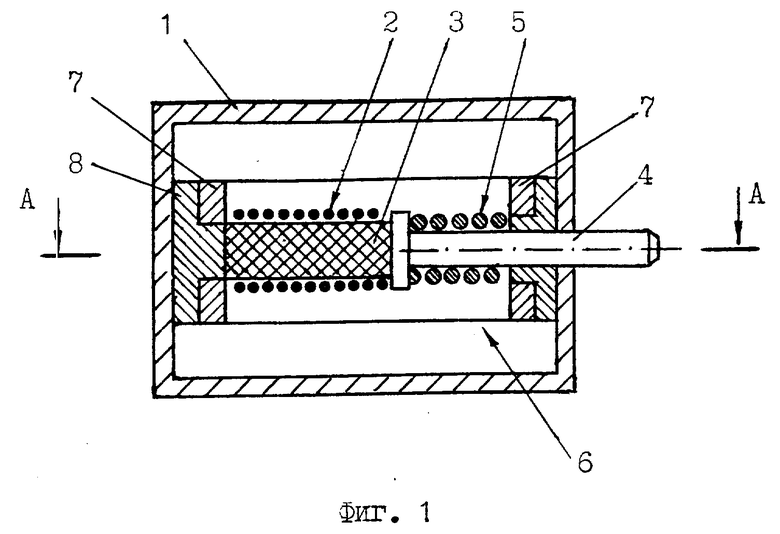
| SU, авторское свидетельство, 765913, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

