Изобретение относится к электротехнике и средствам автоматики и может быть использовано в качестве задатчика регулируемых перемещений преимущественно для прецизионного позиционирования исполнительных элементов машин и механизмов, а именно в прецизионных манипуляторах, в адаптивной оптике, для управления перемещением лазерного луча в обрабатывающих центрах, для перемещения обрабатывающего инструмента в станках, поворота образца в прецизионных кристаллографических рентгеновских установках, перемещения иглы в туннельном микроскопе, в прецизионных дозаторах, в клапанах для управления расходом газообразных и жидких химических реагентов, и т.д.
Известен магнитомеханический преобразователь, содержащий магнитную систему с источником магнитного поля в виде электрической обмотки возбуждения и сердечник из магнитострикционного материала с проходящей через его геометрический центр в направлении перемещения исполнительного элемента «механической» осью, расположенный с зазором относительно источника магнитного поля и состоящий по меньшей мере из одного элемента, при этом исполнительный элемент связан с сердечником с возможностью перемещения (см. авт.св. СССР № 765913, МПК Н01L 41/12, 1980 г.).
Известен магнитострикционный вибратор, имеющий магнитострикционный стержень в качестве генерирующего элемента и подвижный держатель, соединенный со стержнем, соленоид, создающий управляемое магнитное поле, и постоянный магнит, создающий подмагничивающее поле (см. заявку JP № 9075847).
К недостаткам известных технических решений следует отнести высокое энергопотребление источника магнитного поля, поскольку для поддержания необходимых параметров магнитного поля при установлении и сохранении заданных линейных размеров сердечника требуется постоянное пропускание электрического тока через обмотку возбуждения источника магнитного поля. Более того, для известных технических решений характерен дополнительный нагрев магнитной системы и материала сердечника, что приводит к необходимости создания сложной системы охлаждения и температурной компенсации изменения линейных размеров сердечника. Изложенное является причиной увеличения массогабаритных показателей устройства в целом и не позволяет обеспечить достаточную точность при использовании магнитомеханических преобразователей в системах прецизионного позиционирования.
Известны также магнитомеханические преобразователи, содержащие установленные в корпусе состоящую по меньшей мере из одной части магнитную систему с источником магнитного поля и сердечник с проходящей через его геометрический центр механической осью, расположенный с зазором относительно источника магнитного поля и состоящий по меньшей мере из одного элемента из магнитострикционного материала, а также исполнительный элемент, связанный с сердечником с возможностью перемещения относительно корпуса, при этом механическая ось сердечника ориентирована в направлении перемещения исполнительного элемента, в которых источник магнитного поля выполнен в виде по меньшей мере одного постоянного магнита, а сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью относительного перемещения (см. патенты РФ №№ 2032967 и 2075797).
В одном из указанных патентов осуществляется вращательное относительное перемещение сердечника и магнитной системы, а в другом - циклическое возвратно-поступательное перемещение.
В указанных патентах магнитомеханический преобразователь обеспечивает изменение координаты толкателя на 15-30 мкм при потребляемой мощности 5 Вт (мощность двигателя, обеспечивающего относительное перемещение сердечника), при этом поддержание этой координаты в течение любого промежутка времени не требует дополнительных энергозатрат.
В то же время в описанных в патентах преобразователях не представлены решения отдельных технических задач, без которых работа преобразователя будет сопровождаться элементами ненадежности и неточности.
Так в этих патентах не предусмотрено обеспечение управляемого перемещения магнитной системы в реальных условиях ее движения, при которых со стороны магнитострикционного сердечника на магнитную систему действуют пондеромоторные силы и их моменты, направление и величина которых может изменяться во время движения магнитной системы. Кроме того, на магнитную систему во время ее движения действуют силы трения и их моменты. Это может привести к неуправляемому линейному или угловому перемещению магнитной системы, например, к скачкообразному и/или колебательному движению с возможным кратковременным изменению направления движения.
В указанных патентах не рассматривается возможность предупреждения изменения положения магнитострикционного сердечника в пространстве, хотя со стороны магнитной системы на сердечник действуют пондеромоторные силы или их моменты, пытающиеся изменить положение сердечника, что нельзя допустить, т.к. изменение положения сердечника приведет к неуправляемому перемещению исполнительного элемента (толкателя), и даже, возможно, к выходу из строя преобразователя.
В патентах также не предусмотрено обеспечение постоянного силового замыкания между контактирующими поверхностями сердечника и корпуса, с одной стороны, и сердечника и толкателя, с другой, а размыкание такого контакта на каком-либо этапе перемещения приведет к неуправляемому перемещению толкателя при изменении внешней силы. Кроме того, при использовании магнитомеханического преобразователя с вращающейся магнитной системой в качестве вибратора размыкание указанных силовых контактов могут привести к разрушению сердечника. Указанные недостатки уменьшают надежность и стабильность работы преобразователя.
Задачей настоящего изобретения является создание магнитомеханического преобразователя, обладающего надежной и стабильной работой во всем диапазоне перемещений исполнительного элемента, изменений величины и направления сил и их моментов, действующих в преобразователе, а также воздействующих на исполнительный элемент преобразователя.
Другой задачей настоящего изобретения является создание магнитомеханического преобразователя, обладающего удобством и простотой в эксплуатации.
Еще одной задачей настоящего изобретения является создание магнитомеханического преобразователя, в котором осуществляется управляемое перемещение или вращение магнитной системы, а также стабильность положения магнитострикционного сердечника и исполнительного элемента с обеспечением постоянного силового контакта корпуса, сердечника и исполнительного элемента во всем диапазоне рабочих характеристик преобразователя.
Для достижения указанных и других задач предлагается магнитомеханический преобразователь, содержащий включающую в себя по меньшей мере одну часть магнитную систему с источником магнитного поля, выполненным в виде по меньшей мере одного постоянного магнита, установленный в корпусе сердечник с проходящей через его геометрический центр механической осью, контактирующий своей опорной поверхностью с опорной поверхностью корпуса, расположенный с зазором относительно источника магнитного поля и включающий в себя по меньшей мере один элемент из магнитострикционного материала, где сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью перемещения или вращения относительно друг друга, исполнительный элемент, связанный своей опорной поверхностью с опорной поверхностью сердечника с возможностью перемещения относительно корпуса, а механическая ось сердечника ориентирована в направлении перемещения исполнительного элемента, а также упругий элемент, прижимающий опорные поверхности сердечника и корпуса друг к другу и опорные поверхности сердечника и исполнительного элемента друг к другу, при этом указанная по меньшей мере одна часть магнитной системы выполнена с возможностью ее управляемого перемещения или вращения с помощью средства для перемещения или вращения, сердечник и исполнительный элемент установлены с ограничением их смещения в направлении, перпендикулярном направлению перемещения исполнительного элемента, а сила исходного натяжения упругого элемента выбрана с обеспечением постоянного, без размыкания, силового контакта указанных опорных поверхностей исполнительного элемента и сердечника, а также сердечника и корпуса, во всем рабочем диапазоне перемещения магнитной системы, и изменения величины; и направления сил, действующих на сердечник и исполнительный элемент.
Кроме того, сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью вращения относительно друг друга; или сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью перемещения относительно друг друга; или сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью перемещения и вращения относительно друг друга посредством двигателя для перемещения или вращения по меньшей мере одной части магнитной системы.
Дополнительно, магнитомеханический преобразователь может быть снабжен ограничителями смещения сердечника в направлении, перпендикулярном направлению перемещения исполнительного элемента, установленными между корпусом и сердечником и между сердечником и исполнительным элементом за пределами их опорных поверхностей;
или снабжен ограничителями смещения сердечника в направлении, перпендикулярном направлению перемещения исполнительного элемента, установленными между корпусом и сердечником и между сердечником и исполнительным элементом в пределах их опорных поверхностей.
Кроме того, указанный упругий элемент выполнен в виде тарельчатой пружины, действующей на исполнительный элемент в направлении к сердечнику.
Целесообразно, магнитомеханический преобразователь снабдить двигателем вращения, связанным с осью вращения магнитной системы, установленной в подшипниках корпуса, посредством муфты вращения с упругим элементом;
или снабдить двигателем вращения, связанным с осью вращения магнитной системы,
установленной в подшипниках корпуса, посредством жесткой муфты;
или снабдить двигателем вращения высокой жесткости, связанным с осью вращения магнитной системы посредством жесткой муфты;
или снабдить двигателем вращения, кинематически соединенным с осью вращения магнитной системы, установленной в подшипниках корпуса посредством муфты вращения с упругим элементом, связанной с указанной осью вращения через червячную передачу, при этом в корпусе установлена плоская кольцевая пружина для создания механического момента поджатия между элементами зацепления.
Дополнительно, магнитомеханический преобразователь может быть снабжен линейным двигателем, а магнитная система установлена в дополнительном корпусе, закрепленном в корпусе преобразователя в направляющих перемещения, при этом линейный двигатель связан с дополнительным корпусом магнитной системы посредством муфты перемещения с упругим элементом;
или снабжен линейным двигателем, а магнитная система установлена в дополнительном корпусе, закрепленном в корпусе преобразователя в направляющих перемещения, при этом линейный двигатель связан с дополнительным корпусом магнитной системы посредством жесткой муфты;
или снабжен линейным двигателем высокой жесткости, а магнитная система установлена в дополнительном корпусе, расположенном в корпусе преобразователя, при этом линейный двигатель высокой жесткости связан с дополнительным корпусом магнитной системы посредством жесткой муфты;
или может быть снабжен двигателем вращения, а магнитная система установлена в дополнительном корпусе, закрепленном в корпусе преобразователя на по меньшей мере одной направляющей перемещения, при этом двигатель вращения кинематически соединен с дополнительным корпусом магнитной системы посредством муфты вращения с упругим элементом, связанной с указанным дополнительным корпусом через винтовую передачу, при этом в корпусе установлена цилиндрическая пружина для создания силы поджатия между элементами зацепления.
Сущность настоящего изобретения будет более понятна при ознакомлении с последующим описанием предпочтительных вариантов выполнения устройства с учетом сопроводительных чертежей, на которых:
на фиг.1 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное вращение сердечника и магнитной системы осуществляется двигателем вращения с помощью муфты вращения с упругим элементом, а также направляющих вращения, выполненных в виде подшипников вращения;
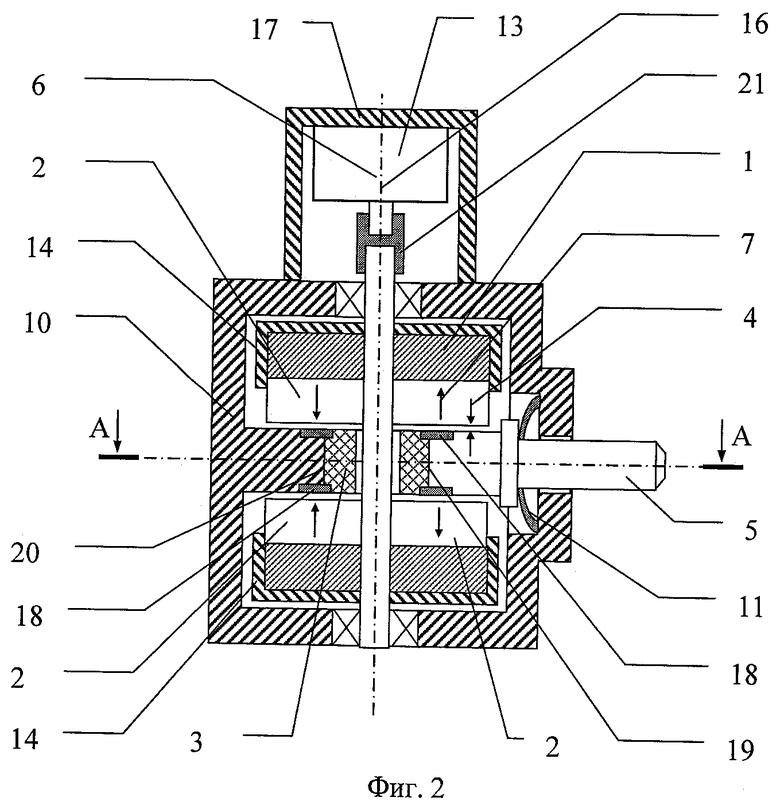
на фиг.2 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное вращение сердечника и магнитной системы осуществляется двигателем вращения с помощью жесткой муфты, а также направляющих вращения, выполненных в виде подшипников вращения;
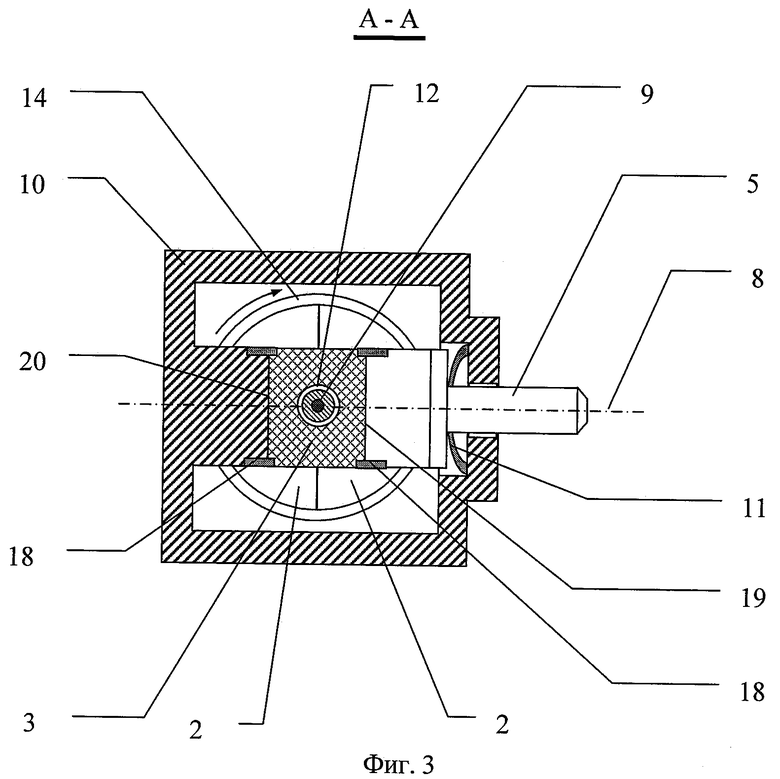
на фиг.3 представлено сечение А-А на фиг.1, 2, 6 и 9;
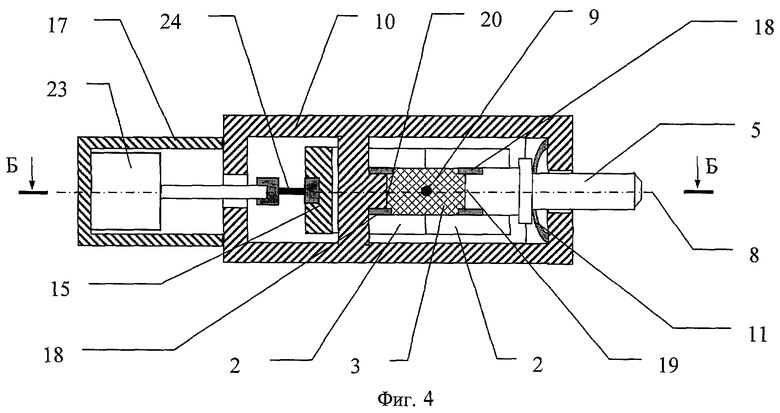
на фиг.4 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное возвратно-поступательное плоскопараллельное относительное перемещение сердечника и магнитной системы осуществляется линейным двигателем с помощью муфты перемещения с упругим элементом, а также направляющих линейного перемещения;
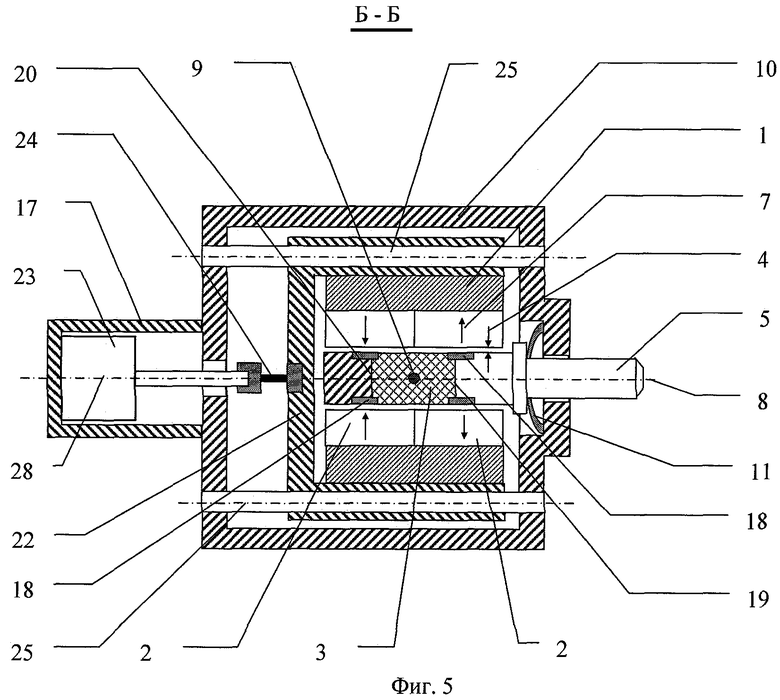
на фиг.5 представлено сечение Б-Б на фиг.4;
на фиг.6 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное вращение сердечника и магнитной системы осуществляется двигателем вращения, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования направляющих вращения преобразователя, выполненных в виде подшипников, и ось которого связана с осью магнитной системы с помощью жесткой муфты;
на фиг.7 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное возвратно-поступательное плоскопараллельное перемещение сердечника и магнитной системы осуществляется линейным двигателем, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования линейных направляющих преобразователя, и ось которого связана с магнитной системой с помощью жесткой муфты;
на фиг.8 представлено сечение В-В на фиг.7;
на фиг.9 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное вращение сердечника и магнитной системы осуществляется двигателем вращения с помощью муфты вращения с упругим элементом и червячной передачи;
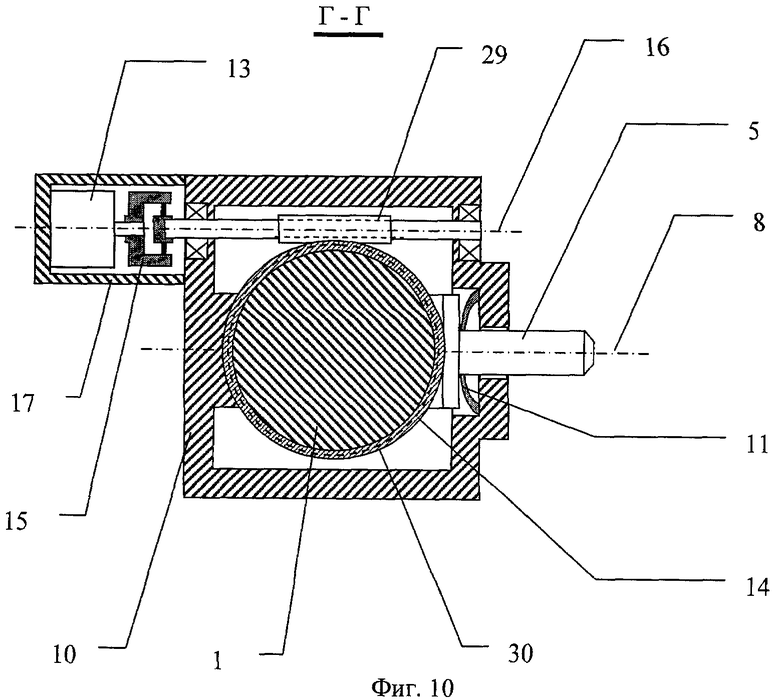
на фиг.10 представлено сечение Г-Г на фиг.9;
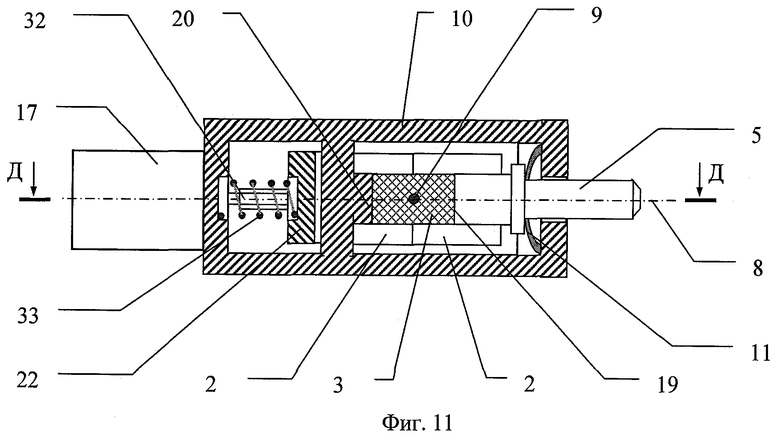
на фиг.11 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное возвратно-поступательное плоскопараллельное перемещение сердечника и магнитной системы осуществляется двигателем вращения с помощью муфты вращения с упругим элементом и винтовой передачи;
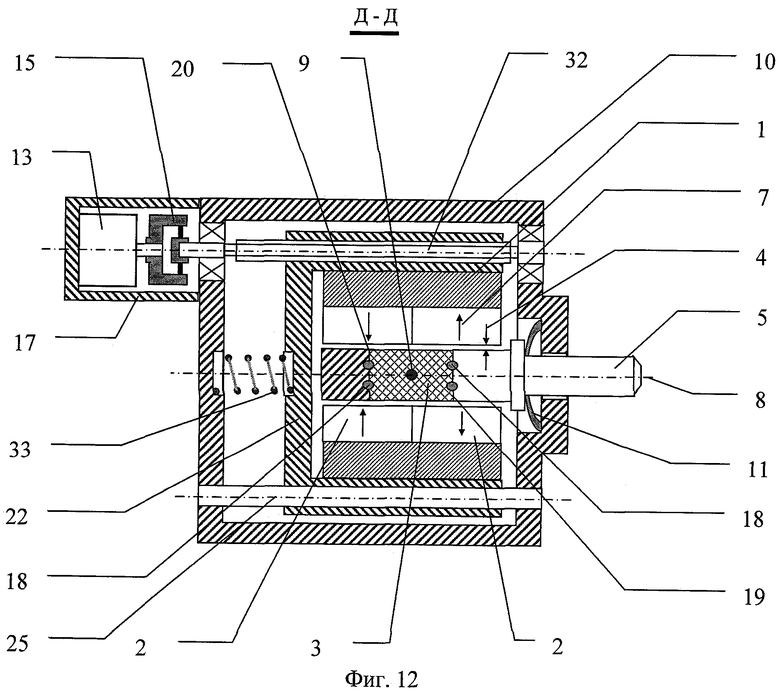
на фиг.12 представлено сечение Д-Д на фиг.11;
на фиг.13 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное вращение сердечника и по меньшей мере одной части магнитной системы осуществляется двигателем вращения с помощью муфты вращения с упругим элементом, а также направляющих вращения, выполненных в виде подшипников вращения;
на фиг.14 представлено сечение Е-Е на фиг.13 и 17;
на фиг.15 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное возвратно-поступательное плоскопараллельное перемещение сердечника и по меньшей мере одной части магнитной системы осуществляется линейным двигателем с помощью муфты вращения с упругим элементом и винтовой передачи;
на фиг.16 представлено сечение Ж-Ж на фиг.15;
на фиг.17 представлен магнитомеханический преобразователь в соответствии с настоящим изобретением, в котором относительное вращение сердечника и по меньшей мере одной части магнитной системы осуществляется двигателем вращения, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования направляющих вращения преобразователя, выполненных в виде подшипников, а относительное возвратно-поступательное плоскопараллельное перемещение сердечника и по меньшей мере одной части магнитной системы осуществляется линейным двигателем, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования линейных направляющих преобразователя, и ось которого связана с по меньшей мере одной частью магнитной системы с помощью жесткой муфты.
Настоящее изобретение будет рассмотрено на основе трех видов изменения взаимного расположения сердечника и магнитной системы: относительного вращения, относительного возвратно-поступательного плоскопараллельного перемещения, а также относительного вращения и относительного возвратно-поступательного плоскопараллельного перемещения.
На фиг.1 и 3 показан магнитомеханический преобразователь, в котором осуществляется относительное вращение сердечника и магнитной системы. Преобразователь содержит магнитную систему, состоящую из магнитопровода 1 и источника магнитного поля, выполненного в виде постоянных магнитов 2, а также сердечник 3, выполненный из магнитострикционного материала и установленный с зазором 4 относительно элементов магнитной системы, и исполнительный элемент в виде толкателя 5. Сердечник 3 и магнитная система установлены с возможностью относительного вращения вокруг оси 6 вращения посредством механизма вращения. Источник магнитного поля выполнен в виде оппозитно расположенных групп постоянных магнитов 2, по одной паре в каждой группе. Вектора 7 намагниченности постоянных магнитов 2 в каждой отдельно взятой группе, а также оппозитно расположенных магнитов 2 в противолежащих группах, ориентированы в противоположных направлениях. Магнитная система на упомянутой фигуре выполнена зеркально-симметричной относительно плоскости, проходящей через механическую ось 8 сердечника 3 (т.е. ось, совпадающую с направлением рабочего перемещения толкателя 5 и проходящую через геометрический центр 9 сердечника 3), при этом магнитная система может иметь как общую, так и индивидуальные для каждой группы оси 6 вращения в зависимости от конструктивного исполнения.
Сердечник 3 расположен в исходном рабочем положении, т.е. его геометрический центр 9 расположен в зоне максимума напряженности продольного по отношению к механической оси 8 магнитного поля магнитной системы. Сердечник 3 контактирует своей опорной поверхностью с опорной поверхностью корпуса 10. Толкатель 5 связан своей опорной поверхностью с опорной поверхностью сердечника 3 с возможностью перемещения относительно корпуса 10 посредством упругого элемента 11, который в данном случае может быть выполнен в виде тарельчатой пружины. Магнитная система смонтирована на оси 6 вращения, которая с зазором 12 может проходить внутри элементов сердечника 3 или между ними и кинематически связана с двигателем 13. Элементы магнитной системы могут быть установлены в корпусах 14, количество которых соответствует количеству оппозитно расположенных групп постоянных магнитов 2.
Сердечник состоит из одного или нескольких элементов, при этом в случае параллельного расположения элементов сердечника 3 симметрично относительно оси вращения указанные элементы выполняются из материала с одинаковой по знаку и величине магнитострикцией.
При последовательном расположении элементов сердечника их в ряде случаев целесообразно чередовать по знаку и величине магнитострикции в зависимости от конструктивного выполнения магнитной системы.
На фиг.1 и 3 сердечник 3 выполнен в виде прямоугольного параллелепипеда с отверстием, внутри которого с зазором 12 проходит ось 6 вращения, вращательное движение оси 6 осуществляется непосредственно от двигателя 13, ось 16 которого связана с осью вращения 6, установленной в подшипниках, через муфту вращения 15 с упругим элементом. Двигатель 13 с муфтой 15 смонтированы в дополнительном корпусе 17. Преобразователь снабжен ограничителями 18 смещения сердечника 3 в направлении, перпендикулярном направлению перемещения толкателя 5. Ограничители 18 смещения сердечника расположены за пределами опорных поверхностей корпуса сердечника и толкателя. Механические контакты опорных поверхностей сердечника и толкателя, а также корпуса и сердечника, обозначены позициями 19 и 20, соответственно.
В этом варианте осуществления настоящего изобретения магнитный преобразователь работает следующим образом.
Предварительно экспериментальным путем или с помощью модельных расчетов определяют положение экстремумов напряженности магнитного поля в рабочей зоне магнитной системы. Геометрический центр 9 сердечника 3 (или геометрический центр каждого элемента сердечника в случае выполнения последнего составным) размещают в одном из максимумов, например в максимуме напряженности продольного относительно механической оси сердечника магнитного поля. Далее для осуществления перемещения исполнительного элемента 5 осуществляют относительное вращение сердечника и магнитной системы, обеспечивая тем самым в геометрическом центре сердечника чередующиеся изменения напряженности магнитного поля от максимума напряженности продольного магнитного поля до максимума напряженности поперечного относительно механической оси сердечника магнитного поля и обратно по замкнутому циклу.
При включении электропитания двигатель 13 начинает вращаться и поворачивает ось 6 вращения со смонтированной на ней магнитной системой. В исходном положении магнитной системы напряженность магнитного поля ориентирована вдоль механической оси элементов сердечника 3 с положительной магнитострикцией и поперек механической оси элементов сердечника 3 с отрицательной магнитострикцией. При повороте магнитной системы на угол от 0° до 90° направление напряженности магнитного поля в каждом магнитострикционном элементе сердечника изменяется, и в конечном положении оно изменяется на 90° по отношению к механической оси каждого магнитострикционного элемента сердечника, что вызывает максимальное изменение длины сердечника 3 и, соответственно, перемещение толкателя 5.
В настоящем изобретении, как указывалось выше, магнитная система выполнена с обеспечением ее управляемого вращения в направляющих вращения, выполненных в виде подшипников качения, которые ограничивают относительное перемещение магнитной системы вращением вокруг заданной оси вращения. Максимальный момент вращения двигателя 13 значительно превосходит действующие на магнитную систему со стороны магнитострикционного сердечника моменты пондеромоторных сил, направление и величина которых может изменяться во время движения магнитной системы, а также моменты сил трения.
Направляющие вращения вследствие своей жесткости препятствуют движению магнитной системы под действием пондеромоторных сил и сил трения, отличному от вращения вокруг заданной оси вращения.
Кроме того, передача вращающего момента от двигателя 13 к оси вращения 6 магнитной системы осуществляется муфтой вращения 15 с упругим элементом, обладающей большой жесткостью при вращении вокруг заданной оси вращения и малой жесткостью в других направлениях. Такая муфта с упругим элементом, выполненным, например, в виде мембраны, позволяет плавно, без рывков, поворачивать магнитную систему даже при наличии небольших перекосов и смещений осей вращения двигателя и магнитной системы друг относительно друга в реально изготовленном магнитомеханическом преобразователе.
Перечисленные выше особенности преобразователя обеспечивают управляемое вращение магнитной системы.
В преобразователе установлены ограничители 18 смещения сердечника, которые во всем диапазоне перемещений и величин действующих на сердечник сил ограничивают смещение сердечника 3 в направлении, перпендикулярном направлению перемещения толкателя 5, чем обеспечивается заданное движение толкателя.
Кроме того, исходная сила натяжения упругого элемента 11 выбрана таким образом, что обеспечивается постоянный силовой контакт без его размыкания опорных поверхностей корпуса 10 и сердечника 3, а также сердечника 3 и толкателя 5, чем дополнительно поддерживается положение сердечника и ограничивается смещение толкателя. Выполнение упругого элемента 11 в виде тарельчатой пружины также дополнительно ограничивает смещение толкателя 5 от пондеромоторных сил, действующих на сердечник 3 в направлении, перпендикулярном направлению перемещения толкателя 5, и разнонаправленного воздействия исполнительного органа (на фиг.1 и 3 не показан), связанного с толкателем.
В преобразователе, используемом в качестве позиционирующего устройства, оптимальная исходная сила натяжения упругого элемента 11 может быть определена экспериментально, например, следующим образом.
Многократно реверсивно поворачивают магнитную систему во всем диапазоне углов поворота при постоянном значении исходной силы натяжения упругого элемента 11, измеряя при этом исходную силу натяжения упругого элемента 11, величину перемещения толкателя 5 и угол поворота магнитной системы. Измерения повторяют также и при других значениях исходной силы натяжения упругого элемента 11.
По результатам измерений строят графики зависимости перемещения толкателя 5 от угла поворота магнитной системы при различных значениях исходной силы натяжения упругого элемента 11. Из всех построенных графиков отбирают для дальнейшего изучения плавные без рывков повторяемые петли гистерезиса перемещения толкателя 5 от угла поворота магнитной системы, остальные графики, содержащие резкие перемещения толкателя 5, в дальнейшем изучении не используются. Для отобранных графиков определяют зависимость максимального во всем диапазоне углов поворота магнитной системы среднего квадратичного отклонения перемещения толкателя 5 от величины исходной силы натяжения упругого элемента 11.
Максимальное во всем диапазоне углов поворота магнитной системы среднее квадратичное отклонение перемещения толкателя 5 уменьшается при увеличении исходной силы натяжения упругого элемента 11, достигая минимального постоянного значения, практически не зависящего от величины исходной силы натяжения упругого элемента 11.
Величину исходной силы натяжения упругого элемента 11 в преобразователе устанавливают несколько больше ее наименьшего значения, при котором максимальное во всем диапазоне углов поворота магнитной системы среднее квадратичное отклонение перемещения толкателя 5 практически не зависит от величины исходной силы натяжения упругого элемента 11.
Не имеет смысла использовать в преобразователе исходную силу натяжения упругого элемента 11, значительно превышающую упомянутое ее наименьшее значение, т.к. при этом будет уменьшаться диапазон перемещения толкателя 5.
В преобразователе, используемом в качестве вибратора, оптимальная исходная сила натяжения упругого элемента 11 может быть определена экспериментально, например, следующим образом.
Преобразователь устанавливают в устройство, в котором его будут использовать в качестве вибратора, и закрепляют толкатель 5 в этом устройстве. Магнитную систему вращают во всем диапазоне частот, используемых в устройстве, при различных значениях исходной силы натяжения упругого элемента 11, обеспечивающего отсутствия механического размыкания механического контакта опорных поверхностей корпуса преобразователя и магнитострикционного сердечника, а также механического контакта опорных поверхностей магнитострикционного сердечника и, толкателя. Контроль отсутствия размыкания механического контакта может производиться многими известными способами, например, по изменению амплитуды акустической эмиссии из области механического контакта, по изменению электрических параметров механических контактов при пропускании через них слабого электрического тока, по изменению акустических параметров механических контактов при пропускании через них слабого ультразвука и т.д.
Величину исходной силы натяжения упругого элемента 11 в преобразователе устанавливают несколько больше ее наименьшего значения, при котором обеспечивается отсутствия размыкания указанных механических контактов во всем диапазоне частот вращения магнитной системы преобразователя.
Не имеет смысла использовать в преобразователе исходную силу натяжения упругого элемента 11, значительно превышающую упомянутое ее наименьшее значение, т.к. при этом будет уменьшаться амплитуда перемещения толкателя 5.
На фиг.2 и 3 показан магнитомеханический преобразователь, в котором также осуществляется относительное вращение сердечника и магнитной системы. Но в этом варианте исполнения магнитомеханического преобразователя передача вращающего момента от двигателя 13 к оси вращения 6 магнитной системы осуществляется жесткой муфтой 21.
Наличие жесткой муфты также позволяет обеспечить плавное, без рывков управляемое перемещение магнитной системы, однако в этом случае требуется высокая точность изготовления магнитомеханического преобразователя.
На фиг.4 и 5 показан магнитомеханический преобразователь, в котором осуществляется второй из рассматриваемых видов относительного перемещения, а именно возвратно-поступательное плоскопараллельное относительное перемещение сердечника и магнитной системы. В этом варианте в качестве корпуса магнитной системы используется корпус 22, а в качестве двигателя используется установленный в дополнительном корпусе 17 линейный двигатель 23. Этот двигатель 23 связан с корпусом 22 посредством муфты перемещения 24 с упругим элементом.
На фиг.4 и 5 сердечник 3 расположен в исходном рабочем положении, т.е. его геометрический центр расположен в зоне максимума напряженности продольного по отношению к «механической» оси 8 или поперечного относительно той же оси магнитного поля магнитной системы. Сердечник 3 контактирует своей опорной поверхностью с опорной поверхностью корпуса 10. Толкатель 5 связан своей опорной поверхностью с опорной поверхностью сердечника 3 с возможностью перемещения относительно корпуса 10 посредством упругого элемента 11. В ряде случаев для увеличения диапазона изменения линейных размеров сердечник выполняют из нескольких элементов из материалов с чередующейся по знаку магнитострикцией. Кроме того, между элементами с различной (положительной или отрицательной) магнитострикцией может быть расположен элемент с «нулевой» магнитострикцией и модулем упругости, не меньшим модуля упругости магнитострикционных элементов сердечника.
Элементы сердечника с положительной и отрицательной магнитострикцией размещают в экстремумах и «узлах» магнитного поля соответственно. При этом в исходном состоянии составной сердечник имеет свою максимальную длину. При перемещении сердечника его элементы перемещаются из «узлов» в экстремумы и из экстремумов в «узлы» соответственно, и при этом в конечном состоянии элементы с положительной магнитострикцией оказываются в «узлах», а с отрицательной, в экстремумах, т.е. каждый элемент укорачивается, поэтому сердечник в конечном положении имеет свою минимальную длину.
«Механическую» ось 8 сердечника 3 ориентируют (в процессе изготовления) преимущественно параллельно или перпендикулярно относительно оси легчайшего намагничивания сердечника, а последнюю - преимущественно параллельно относительно направления вектора напряженности магнитного поля в экстремуме, соответствующем исходному рабочему положению геометрического центра сердечника 3.
В настоящем изобретении, как указывалось выше, магнитная система выполнена с обеспечением ее управляемого перемещения. В данном варианте такое движение осуществляется при возвратно-поступательном плоскопараллельном перемещении магнитной системы вдоль линейных направляющих 25, которые ограничивают относительное перемещение магнитной системы в направлениях, перпендикулярных заданной оси перемещения.
Максимальная сила линейного двигателя 23 значительно превосходит действующие на магнитную систему со стороны магнитострикционного сердечника пондеромоторные силы, направление и величина которых может изменяться во время движения магнитной системы, а также силы трения.
Линейные направляющие 25 вследствие своей жесткости препятствуют перемещению магнитной системы под действием пондеромоторных сил и сил трения в направлениях, перпендикулярных заданной оси перемещения.
Кроме того, передача силы от линейного двигателя 23 к магнитной системе осуществляется муфтой перемещения 24 с упругим элементом, обладающей большой жесткостью вдоль заданной оси перемещения и малой жесткостью в других направлениях. Такая муфта с упругим элементом, выполненным, например, в виде стержня, позволяет плавно, без рывков, перемещать магнитную систему даже при наличии небольших перекосов и смещений оси 28 перемещения линейного двигателя и линейных направляющих 25 магнитной системы друг относительно друга в реально изготовленном магнитомеханическом преобразователе.
В то же время, возможен вариант осуществления преобразователя с линейными направляющими, в котором передача силы от линейного двигателя 23 к магнитной системе осуществляется посредством жесткой муфты, аналогичной представленной на фиг.2 при вращательном движении.
Перечисленные выше особенности преобразователя обеспечивают управляемое перемещение магнитной системы.
Экспериментальное определение оптимальной исходной силы натяжения упругого элемента 11 проводят так же, как для преобразователя, представленного на фиг.1 и используемого в качестве позиционирующего устройства. При этом магнитную систему перемещают возвратно-поступательно во всем диапазоне ее перемещения.
На фиг.6 и 2 показан магнитомеханический преобразователь, в котором относительное вращение сердечника и магнитной системы осуществляется двигателем вращения 26 высокой жесткости, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования направляющих вращения преобразователя, выполненных в виде подшипников, и ось которого связана с осью магнитной системы с помощью жесткой муфты 21. В этом варианте в качестве направляющих вращения преобразователя, способствующих управляемому вращению магнитной системы, используются подшипники вращения двигателя 26 высокой жесткости.
На фиг.7 и 8 показан магнитомеханический преобразователь, в котором относительное возвратно-поступательное плоскопараллельное перемещение сердечника и магнитной системы осуществляется линейным двигателем 27 высокой жесткости, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования линейных направляющих преобразователя, и ось которого связана с магнитной системой с помощью жесткой муфты 21. В этом варианте в качестве линейных направляющих преобразователя, способствующих управляемому перемещению магнитной системы по вдоль заданной оси, используются линейные направляющие двигателя 27 высокой жесткости.
На фиг.9, 10 и 2 показан магнитомеханический преобразователь, в котором связь двигателя с магнитной системой обеспечивается с помощью механической передачи, в данном случае относительное вращение сердечника и магнитной системы осуществляется с помощью червячной передачи. Двигатель 13 соединен через муфту 15 вращения, имеющую упругий элемент, с червячным винтом 29, который через червячную шестерню 30 передает момент сил от двигателя 13 к оси вращения 6 магнитной системы. Для обеспечения постоянного контакта элементов зацепления в указанной системе передачи механического момента дополнительно введена плоская кольцевая пружина 31, обеспечивающая при предварительном закручивании механический момент поджатия между элементами зацепления. Этот механический момент поджатия превосходит действующие на магнитную систему со стороны магнитострикционного сердечника моменты пондеромоторных сил, направление и величина которых может изменяться во время движения магнитной системы, а также моменты сил трения.
Направление механического момента поджатия обычно выбирают совпадающим с направлением проекции максимального момента пондеромоторных сил, действующих на магнитную систему при ее перемещении, на ось вращения магнитной системы. Использование постоянного силового контакта элементов зацепления обеспечивает плавное, без рывков, управляемое вращение магнитной системы.
Постоянный силовой контакт элементов зацепления на фиг.10 может быть создан и другими известными способами, например, с использованием червячной шестерни, включающей в себя две прижатые друг к другу одинаковые червячные шестерни, первая из которых неподвижно закреплена на оси вращения, а вторая свободно надета на ось вращения и соединена с первой с помощью плоской кольцевой пружины. Перед началом контакта с червячным винтом вторую червячную шестерню закручивают на некоторый угол, и после этого всю систему подводят к червячному винту.
На фиг.11 и 12 показан магнитомеханический преобразователь, в котором связь двигателя с магнитной системой обеспечивается с помощью механической передачи, в данном случае относительное возвратно-поступательное плоскопараллельное, перемещение сердечника и магнитной системы осуществляется с помощью винтовой передачи. Двигатель 13 соединен через муфту 15 вращения, имеющую упругий элемент, с ходовым винтом 32, при вращении которого перемещается корпус 22 с магнитной системой.
Ограничители 18 смещения сердечника выполнены в виде вкладышей, расположенных в пределах опорных поверхностей корпуса, сердечника и толкателя.
Для обеспечения постоянного контакта элементов зацепления в указанной системе передачи силы дополнительно введена цилиндрическая пружина 33, обеспечивающая при предварительном натяжении силу поджатия между элементами зацепления. Эта сила поджатия превосходит действующие на магнитную систему со стороны магнитострикционного сердечника пондеромоторные силы, направление и величина которых может изменяться во время движения магнитной системы, а также силы трения. Направление силы поджатия обычно выбирают совпадающим с направлением проекции пондеромоторных сил, действующих на магнитную систему при ее перемещении, на ось перемещения магнитной системы.
Использование постоянного силового контакта элементов зацепления обеспечивает плавное, без рывков, управляемое перемещение магнитной системы вдоль заданной оси. Постоянный силовой контакт элементов зацепления может быть создан и другими известными способами, например, с использованием ходовой гайки, включающей в себя две гайки с одинаковой ходовой резьбой, первая из которых неподвижно закреплена на корпусе магнитной системы, а вторая прикреплена к первой с помощью плоской пружины, при этом вторая подвижная гайка может перемещаться вдоль оси ходовой резьбы, но не может поворачиваться вокруг этой оси. Ходовой винт ввинчивают во вторую подвижную гайку, натягивают пружину вдоль винта, и после этого ходовой винт ввинчивают в первую ходовую гайку.
На фиг.13 и 14 показан магнитомеханический преобразователь, в котором осуществляется относительное вращение сердечника и по меньшей мере одной части магнитной системы. Преобразователь содержит магнитную систему, состоящую из неподвижной и подвижной частей. Сердечник 3 выполнен в виде прямоугольного параллелепипеда. Неподвижная часть магнитной системы установлена в корпусе преобразователя 10. Подвижная часть магнитной системы смонтирована на оси 6 вращения, которая кинематически связана с двигателем 13. Вращательное движение оси 6 осуществляется непосредственно от двигателя 13, ось 16 которого связана с осью вращения 6, установленной в подшипниках, через муфту вращения 15 с упругим элементом. Двигатель 13 с муфтой 15 смонтированы в дополнительном корпусе 17. Преобразователь снабжен ограничителями 18 смещения сердечника 3 в направлении, перпендикулярном направлению перемещения толкателя 5. Ограничители 18 смещения сердечника расположены за пределами опорных поверхностей корпуса сердечника и толкателя. Механические контакты опорных поверхностей сердечника и толкателя, а также корпуса и сердечника, обозначены позициями 19 и 20 соответственно.
В этом варианте осуществления настоящего изобретения магнитный преобразователь работает следующим образом.
Для осуществления перемещения исполнительного элемента 5 осуществляют относительное вращение сердечника и по меньшей мере одной части магнитной системы, обеспечивая тем самым в геометрическом центре сердечника чередующиеся изменения напряженности магнитного поля от максимума напряженности продольного магнитного поля до максимума напряженности поперечного относительно механической оси сердечника магнитного поля и обратно по замкнутому циклу.
При включении электропитания двигатель 13 начинает вращаться и поворачивает ось 6 вращения со смонтированной на ней подвижной частью магнитной системы. В исходном положении подвижной части магнитной системы напряженность магнитного поля ориентирована вдоль механической оси сердечника 3. При повороте подвижной части магнитной системы на угол от 0° до 180° направление напряженности магнитного поля в магнитострикционном сердечнике изменяется, и в конечном положении оно изменяется на 90° по отношению к механической оси сердечника, что вызывает максимальное изменение длины сердечника 3 и, соответственно, перемещение толкателя 5.
На фиг.15 и 16 показан магнитомеханический преобразователь, в котором связь двигателя с магнитной системой обеспечивается с помощью механической передачи, в данном случае относительное возвратно-поступательное плоскопараллельное перемещение сердечника и по меньшей мере одной части магнитной системы осуществляется с помощью винтовой передачи. Преобразователь содержит магнитную систему, состоящую из неподвижной и подвижной частей. Сердечник 3 выполнен в виде прямоугольного параллелепипеда. Неподвижная часть магнитной системы установлена в корпусе преобразователя 10. Двигатель 13 соединен через муфту 15 вращения, имеющую упругий элемент, с ходовым винтом 32, при вращении которого перемещается корпус 22 с подвижной частью магнитной системы вдоль линейной направляющей 25. Ограничители 18 смещения сердечника выполнены в виде вкладышей, расположенных в пределах опорных поверхностей корпуса, сердечника и толкателя.
Для обеспечения постоянного контакта элементов зацепления в указанной системе передачи силы дополнительно введена цилиндрическая пружина 33, обеспечивающая при предварительном натяжении силу поджатия между элементами зацепления. Эта сила поджатия превосходит действующие на подвижную часть магнитной системы со стороны магнитострикционного сердечника пондеромоторные силы, направление и величина которых может изменяться во время движения подвижной части магнитной системы, а также силы трения.
Направление силы поджатия обычно выбирают совпадающим с направлением проекции пондеромоторных сил, действующих на подвижную часть магнитной системы при ее перемещении, на ось перемещения подвижной части магнитной системы. Использование постоянного силового контакта элементов зацепления обеспечивает плавное, без рывков, управляемое перемещение подвижной части магнитной системы вдоль заданной оси.
При исходном положении подвижной части магнитной системы геометрический центр сердечника с положительной или отрицательной магнитострикцией наводится в максимуме напряженности магнитного поля, продольного относительно механической оси 8 сердечника. При перемещении подвижной части магнитной системы в конечное положение геометрический центр сердечника оказывается в нуле напряженности магнитного поля, поперечного относительно механической оси 8 сердечника, а максимум и минимум напряженности этого магнитного поля оказываются около опорных торцов сердечника. В результате длина сердечника максимально изменяется.
На фиг.17 и 14 показан магнитомеханический преобразователь, в котором осуществляется относительное вращение и относительное возвратно-поступательное плоскопараллельное перемещение сердечника и по меньшей мере одной части магнитной системы. Относительное вращение осуществляется двигателем вращения 26 высокой жесткости, относительное возвратно-поступательное плоскопараллельное перемещение осуществляется линейным двигателем 27 высокой жесткости. Преобразователь содержит магнитную систему, состоящую из неподвижной и подвижной частей. Сердечник 3 выполнен в виде прямоугольного параллелепипеда. Неподвижная часть магнитной системы установлена в корпусе преобразователя 10. Подвижная часть магнитной системы смонтирована на оси 6 вращения, которая кинематически связана с двигателем вращения 26 высокой жесткости, который за счет размеров и жесткости своей конструкции обеспечивает заданное положение магнитной системы преобразователя в пространстве без использования направляющих вращения преобразователя, выполненных в виде подшипников, и ось которого связана с осью вращения 6 подвижной части магнитной системы с помощью жесткой муфты 21. В этом варианте выполнения преобразователя в качестве направляющих вращения преобразователя, способствующих управляемому вращению подвижной части магнитной системы, используются подшипники вращения двигателя 26 высокой жесткости. Корпус двигателя вращения 26 высокой жесткости закреплен непосредственно на оси линейного двигателя 27 высокой жесткости, корпус которого смонтирован в дополнительном корпусе 17. Сердечник 3 расположен с зазором 2 относительно неподвижной части магнитной системы и с регулируемым зазором 34 относительно подвижной части магнитной системы. Преобразователь снабжен ограничителями 18 смещения сердечника 3 в направлении, перпендикулярном направлению перемещения толкателя 5. Ограничители 18 смещения сердечника расположены за пределами опорных поверхностей корпуса сердечника и толкателя. Механические контакты опорных поверхностей сердечника и толкателя, а также корпуса и сердечника, обозначены позициями 19 и 20, соответственно.
В этом варианте осуществления настоящего изобретения магнитный преобразователь работает следующим образом.
Для осуществления перемещения исполнительного элемента 5 осуществляют относительное вращение сердечника и по меньшей мере одной части магнитной системы, обеспечивая тем самым в сердечнике чередующиеся изменения напряженности магнитного поля от продольного магнитного поля до поперечного относительно механической оси сердечника магнитного поля и обратно по замкнутому циклу, а также относительное возвратно-поступательное плоскопараллельное перемещение сердечника и по меньшей мере одной части магнитной системы, обеспечивая тем самым в сердечнике изменения величины напряженности магнитного поля.
При включении электропитания двигатель вращения 26 высокой жесткости начинает вращаться и поворачивает ось 6 вращения со смонтированной на ней подвижной частью магнитной системы. В исходном положении подвижной части магнитной системы напряженность магнитного поля ориентирована вдоль механической оси сердечника 3. При повороте подвижной части магнитной системы на угол от 0° до 180° направление напряженности магнитного поля в магнитострикционном сердечнике изменяется, и в конечном положении оно изменяется на 90° по отношению к механической оси сердечника, что вызывает максимальное изменение длины сердечника 3 и соответственно перемещение толкателя 5.
При включении электропитания линейный двигатель 27 высокой жесткости начинает перемещать двигатель вращения 26 высокой жесткости со смонтированной на нем подвижной частью магнитной системы в пределах от максимального зазора 34 между сердечником 3 и подвижной частью магнитной системы до минимального зазора 2. При перемещении подвижной части магнитной системы изменяется величина напряженности магнитного поля в сердечнике происходит изменение длины сердечника 3 и, соответственно, перемещение толкателя 5.
При использовании преобразователя в качестве позиционирующего устройства относительное возвратно-поступательное плоскопараллельное перемещение подвижной части магнитной системы приводит к изменению диапазона перемещения толкателя 5. При использовании преобразователя в качестве вибратора относительное возвратно-поступательное плоскопараллельное перемещение подвижной части магнитной системы приводит к изменению амплитуды колебаний перемещения толкателя 5.
Во всех представленных вариантах осуществления настоящего изобретения предусмотрены усовершенствования, повышающие рабочие характеристики преобразователя. Преобразователь выполнен таким образом, что в нем обеспечивается ограничение смещения сердечника 3 в направлении, перпендикулярном направлению перемещения исполнительного элемента (толкателя 5). Эту функцию могут выполнять ограничители 18 смещения сердечника, закрепленные за пределами или в пределах опорных поверхностей корпуса 10, исполнительного элемента 5 и/или сердечника 3. Дополнительно, упругий элемент 11 имеет такие характеристики, что его сила исходного натяжения выбрана с обеспечением постоянного, без размыкания, силового контакта указанных опорных поверхностей толкателя 5 с сердечником 3 и сердечника 3 с корпусом 10 во всем рабочем диапазоне перемещения магнитной системы и изменения величины и направления сил, действующих на сердечник и толкатель. Таким образом, упругий элемент 11, обеспечивая постоянный контакт опорных поверхностей указанных элементов, дополнительно способствует стабильному положению сердечника 3 и толкателя 5 в пространстве. Необходимая характеристика упругого элемента подбирается известными в данной области техники способами.
Кроме того, преобразователь выполнен так, чтобы перемещение или вращение указанной по меньшей мере одной части магнитной системы было управляемым, т.е. плавным, повторяемым и в заданном направлении.
Эффект управляемости магнитной системы, как указано выше, в настоящем изобретении можно достичь, если:
- при перемещении по меньшей мере одной части магнитной системы ограничивать ее относительное перемещение в направлениях, перпендикулярных заданной оси перемещения;
- ограничивать относительное вращение по меньшей мере одной части магнитной системы вращением вокруг заданной оси вращения;
- использовать элементы с высокой жесткостью для передачи силы или момента сил при перемещении магнитной системы;
- использовать для перемещения магнитной системы силу или момент вращения двигателя, значительно превосходящий действующие на магнитную систему пондеромоторные силы и их моменты, а также силы трения и их моменты.
Эффект управляемости магнитной системы в случае применения механической передачи для перемещения магнитной системы достигается при дополнительном к перечисленному выше использовании постоянного силового контакта элементов зацепления механической передачи.
При конкретной реализации предпочтительных вариантов постоянные магниты выполнялись из материала типа Nd-Fe-B, магнитопровод из стали 3, сердечник вытянутой формы был выполнен в виде одного или двух элементов в форме параллелепипеда из материала TbFe2. Габаритные размеры из четырех магнитов: 30×20×10 мм3. Габаритные размеры каждого из двух элементов сердечника: длина 20 мм, ширина 4-8 мм, высота 8 мм. Зазор между сердечником и каждой из двух частей магнитной системы составляет по 1,5 мм. Величина напряженности магнитного поля в геометрическом центре составного сердечника (в максимуме напряженности) равнялась 360 кА/м. Мощность двигателя, осуществляющего относительное перемещение сердечника при позиционировании, составляла 5 Вт. Относительное перемещение сердечника осуществлялось таким образом, что продольная ось сердечника совпадала с его «механической» осью, осью легчайшего намагничивания и направлением вектора напряженности магнитного поля в исходном положении магнитной системы.
Как видно из описания представленных предпочтительных вариантов осуществления настоящего изобретения, введение в магнитомеханический преобразователь указанных новых конструктивных особенностей способствует созданию преобразователя, имеющего высокую надежность в работе во всем диапазоне перемещений исполнительного элемента, изменений величины и направления действующих сил. Эксплуатация преобразователя становится более понятной и ожидаемой.
В данном описании раскрыты предпочтительные варианты выполнения магнитомеханического преобразователя, но следует понимать, что, не отходя от сущности изобретения, можно предложить и другие модификации, которые находятся в рамках заявленного в предложенной формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (ВАРИАНТЫ) | 1997 |
|
RU2120177C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1993 |
|
RU2032967C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1993 |
|
RU2075797C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ МАГНИТОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 1997 |
|
RU2120693C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ МАГНИТОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 1996 |
|
RU2102829C1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ | 1996 |
|
RU2102830C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ МЕХАНИЧЕСКОГО НАГРУЖЕНИЯ В ЭНЕРГИЮ ЦИКЛИЧЕСКОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2143170C1 |
| Магнитомеханический преобразователь | 1978 |
|
SU765913A1 |
| ВАКУУМНОЕ УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ИЗДЕЛИЙ | 1998 |
|
RU2139179C1 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 1997 |
|
RU2118247C1 |
Изобретение относится к прецизионному позиционированию исполнительных элементов машин и механизмов с использованием магнитострикционного эффекта. Сущность: магнитомеханический преобразователь содержит магнитную систему с источником магнитного поля, выполненным в виде по меньшей мере одного постоянного магнита, установленный в корпусе сердечник с проходящей через его геометрический центр механической осью, контактирующий своей опорной поверхностью с опорной поверхностью корпуса. Сердечник расположен с зазором относительно источника магнитного поля и включает в себя по меньшей мере один элемент из магнитострикционного материала. Сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью перемещения или вращения относительно друг друга. Исполнительный элемент связан своей опорной поверхностью с опорной поверхностью сердечника с возможностью перемещения относительно корпуса. Опорные поверхности сердечника и корпуса и опорные поверхности сердечника и исполнительного элемента прижаты друг к другу с помощью упругого элемента. Сердечник и исполнительный элемент установлены с ограничением их смещения в направлении, перпендикулярном направлению перемещения исполнительного элемента. Сила исходного натяжения упругого элемента выбрана с обеспечением постоянного, без размыкания, силового контакта указанных опорных поверхностей исполнительного элемента с сердечником и сердечника с корпусом во всем рабочем диапазоне перемещения магнитной системы и изменения величины и направления сил, действующих на сердечник и исполнительный элемент. Технический результат: обеспечение надежной и стабильной работы во всем диапазоне перемещений исполнительного элемента, изменений величины и направления сил, действующих в преобразователе. 13 з.п. ф-лы, 12 ил.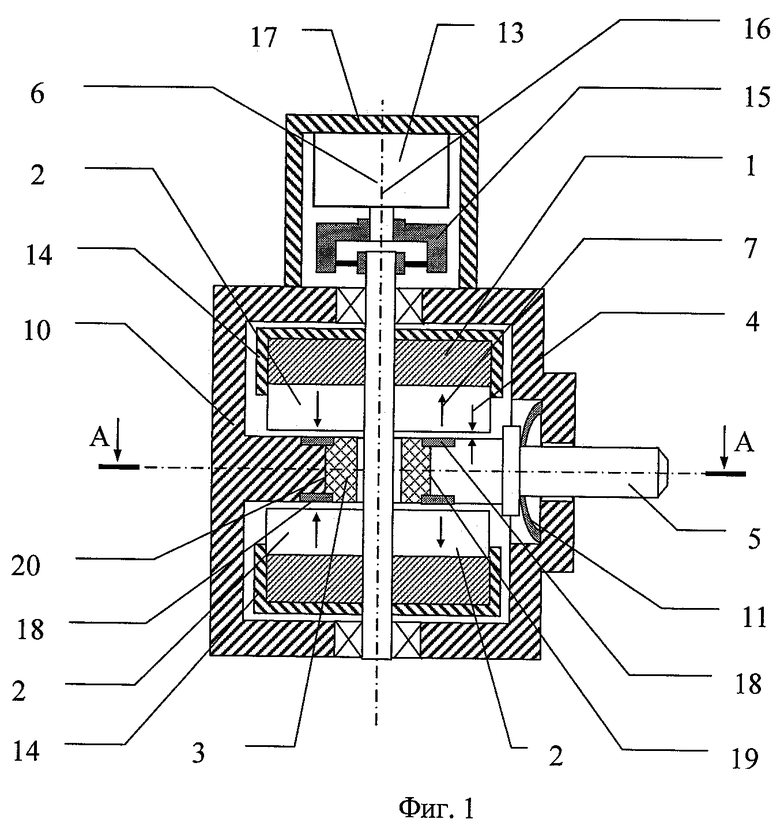
1. Магнитомеханический преобразователь, содержащий
включающую в себя по меньшей мере одну часть магнитную систему с источником магнитного поля, выполненным в виде по меньшей мере одного постоянного магнита,
установленный в корпусе сердечник с проходящей через его геометрический центр механической осью, контактирующий своей опорной поверхностью с опорной поверхностью корпуса, расположенный с зазором относительно источника магнитного поля и включающий в себя по меньшей мере один элемент из магнитострикционного материала, причем сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью перемещения или вращения относительно друг друга,
исполнительный элемент, связанный своей опорной поверхностью с опорной поверхностью сердечника с возможностью перемещения относительно корпуса, а механическая ось сердечника ориентирована в направлении перемещения исполнительного элемента, и
упругий элемент, прижимающий опорные поверхности сердечника и корпуса друг к другу и опорные поверхности сердечника и исполнительного элемента друг к другу,
указанная по меньшей мере одна часть магнитной системы выполнена с обеспечением ее управляемого перемещения или вращения с помощью средства для перемещения или вращения,
сердечник и исполнительный элемент установлены с ограничением их смещения в направлении, перпендикулярном направлению перемещения исполнительного элемента,
сила исходного натяжения упругого элемента выбрана с обеспечением постоянного без размыкания силового контакта указанных опорных поверхностей исполнительного элемента с сердечником и сердечника с корпусом во всем рабочем диапазоне перемещения магнитной системы и изменения величины и направления сил, действующих на сердечник и исполнительный элемент.
2. Магнитомеханический преобразователь по п.1, в котором сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью вращения относительно друг друга.
3. Магнитомеханический преобразователь по п.1, в котором сердечник и по меньшей мере одна часть магнитной системы установлены с возможностью перемещения относительно друг друга.
4. Магнитомеханический преобразователь по п.1, который снабжен ограничителями смещения сердечника в направлении, перпендикулярном направлению перемещения исполнительного элемента, установленными между корпусом и сердечником и между сердечником и исполнительным элементом за пределами их опорных поверхностей.
5. Магнитомеханический преобразователь по п.1, который снабжен ограничителями смещения сердечника в направлении, перпендикулярном направлению перемещения исполнительного элемента, установленными между корпусом и сердечником и между сердечником и исполнительным элементом в пределах их опорных поверхностей.
6. Магнитомеханический преобразователь по п.1, в котором указанный упругий элемент выполнен в виде тарельчатой пружины, действующей на исполнительный элемент в направлении к сердечнику.
7. Магнитомеханический преобразователь по п.2, который снабжен двигателем вращения, связанным с осью вращения магнитной системы, установленной в подшипниках корпуса, посредством муфты вращения с упругим элементом.
8. Магнитомеханический преобразователь по п.2, который снабжен двигателем вращения, связанным с осью вращения магнитной системы, установленной в подшипниках корпуса, посредством жесткой муфты.
9. Магнитомеханический преобразователь по п.2, который снабжен двигателем вращения высокой жесткости, связанным с осью вращения магнитной системы посредством жесткой муфты.
10. Магнитомеханический преобразователь по п.2, который снабжен двигателем вращения, кинематически соединенным с осью вращения магнитной системы, установленной в подшипниках корпуса, посредством муфты вращения с упругим элементом, связанной с указанной осью вращения через червячную передачу, при этом в корпусе установлена плоская кольцевая пружина для создания механического момента поджатия между элементами зацепления.
11. Магнитомеханический преобразователь по п.3, который снабжен линейным двигателем, а магнитная система установлена в дополнительном корпусе, закрепленном в корпусе преобразователя в направляющих перемещения, при этом линейный двигатель связан с дополнительным корпусом магнитной системы посредством муфты перемещения с упругим элементом.
12. Магнитомеханический преобразователь по п.3, который снабжен линейным двигателем, а магнитная система установлена в дополнительном корпусе, закрепленном в корпусе преобразователя в направляющих перемещения, при этом линейный двигатель связан с дополнительным корпусом магнитной системы посредством жесткой муфты.
13. Магнитомеханический преобразователь по п.3, который снабжен линейным двигателем высокой жесткости, а магнитная система установлена в дополнительном корпусе, расположенном в корпусе преобразователя, при этом линейный двигатель высокой жесткости связан с дополнительным корпусом магнитной системы посредством жесткой муфты.
14. Магнитомеханический преобразователь по п.3, который снабжен двигателем вращения, а магнитная система установлена в дополнительном корпусе, закрепленном в корпусе преобразователя на по меньшей мере одной направляющей перемещения, при этом двигатель вращения кинематически соединен с дополнительным корпусом магнитной системы посредством муфты вращения с упругим элементом, связанной с указанным дополнительным корпусом через винтовую передачу, при этом в корпусе установлена цилиндрическая пружина для создания силы поджатия между элементами зацепления.
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1993 |
|
RU2032967C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1993 |
|
RU2075797C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

