Изобретение относится к электротехнике и может быть использовано для регулирования частоты вращения m-фазного электродвигателя переменного тока.
Известен способ управления частотой вращения асинхронных электродвигателей, заключающийся в превращении переменного тока в постоянный путем выпрямления с последующим обратным инвертированием в переменный ток управляемой частоты [1]
Недостатком указанного способа является необходимость двойного преобразования электроэнергии, обуславливающего уменьшение КПД преобразовательных устройств и высокую сложность электронных тиристорных схем, а следовательно, невысокую надежность в работе, большие массогабаритные показатели и высокую стоимость. Кроме того, в диапазоне низких и "ползучих" угловых скоростей электродвигателя данный способ преобразования частоты становится неэффективным из-за неустойчивой работы тиристорных преобразователей на низких частотах, а также из-за невозможности достижения очень низких частот. Так, например, нижний предел регулирования частоты для тиристорных преобразователей типа ЭКГ составляет 1 Гц, что даже для шестиполюсной машины соответствует 10 об/мин. Для достижения меньшей угловой скорости необходимо обеспечить частоту питающего напряжения в доли герца, что при данном способе физически весьма затруднительно.
Наиболее близким к заявляемому способу является способ регулирования частотой вращения трехфазного асинхронного электродвигателя [2] при котором электродвигатель периодически, с заданным периодом, подключают к питающей сети, причем заданный период подключения электродвигателя устанавливают равным  путем циклической смены фаз питающей сети, подключаемых к каждой фазной обмотке электродвигателя, где T1 период напряжения сети; K 1, 2, 3. n 1, 2. Наиболее близким устройством к заявляемому является устройство [2] реализующее известный способ, которое содержит непосредственный преобразователь частоты, включающий три группы тиристоров, трехканальный распределитель импульсов, блок задания угла управления, систему импульсно-фазового управления и блок задания коэффициента счета.
путем циклической смены фаз питающей сети, подключаемых к каждой фазной обмотке электродвигателя, где T1 период напряжения сети; K 1, 2, 3. n 1, 2. Наиболее близким устройством к заявляемому является устройство [2] реализующее известный способ, которое содержит непосредственный преобразователь частоты, включающий три группы тиристоров, трехканальный распределитель импульсов, блок задания угла управления, систему импульсно-фазового управления и блок задания коэффициента счета.
Недостатками известных способа и устройства являются необходимость применения специальных тиристорных преобразователей, стоимость каждого из которых в 5 10 раз выше, а надежность на порядок ниже самого электродвигателя, за счет применения большого числа силовых коммутирующих элементов. Кроме того, известные способ и устройство не устраняют такие проблемы, как перегревание электродвигателя, пульсирующий вращающий момент, избыточное напряжение на обмотке.
Целью данного изобретения является расширение диапазона управления частоту вращения трехфазного асинхронного двигателя как вверх, так и вниз от синхронной частоты, улучшение энергетических характеристик, повышение надежности.
Указанная цель достигается тем, что в способе управления частотой вращения m-фазного электродвигателя, при котором осуществляют периодическое подключение обмоток статора m-фазного электродвигателя к питающей сети напряжением U0 и частотой ω в момент переключения обмоток статора смещают фазы токов одновременно во всех обмотках статора со скоростью
и изменяют в подключенной обмотке статора мгновенное значение подводимого напряжения по закону ,
,
где
n частоты вращения ротора; скорость смещения фаз токов в обмотках статора;
скорость смещения фаз токов в обмотках статора;
w частоты сети.
Указанная цель достигается также тем, что в устройстве для управления частотой вращения, содержащим m регуляторов амплитуды напряжения, силовые входы которых соединены с фазами сети, блок управления, составленный из задатчика частоты вращения и распределителя импульсов, выходами подключенного к управляющим входам регуляторов амплитуды напряжения, введены три инвертора, последовательно соединенные делитель частоты и распределитель импульсов, выходами подключенный к управляющим входам инверторов, силовые входы которых соединены с выходами регуляторов амплитуды напряжения, а выходы с соответствующими обмотками m-фазного электродвигателя, а блок управления снабжен последовательно соединенными датчиками тока одной из обмоток m-фазного электродвигателя и двухвходовым регулятором тока, выходом соединенных с первым входом распределителя импульсов блока управления, а вторым входом с выходом задатчика тока, и управляемым генератором импульсов, входом подключенным к выходу задатчика частоты вращения, а выходом к второму входу распределителя импульсов блока управления и входу делителя частоты.
Указанная цель достигается также тем, что в устройстве для управления частотой вращения m-фазного электродвигателя, содержащем m регуляторов амплитуды напряжения, силовые входы которых соединены с фазами сети, блок управления, составленный из задатчика частоты вращения и распределителя импульсов, выходами подключенного к первым управляющим входам регуляторов амплитуды напряжения, регуляторы амплитуды напряжения выполнены в виде модуляторов напряжения и введены m-сумматоров, первые силовые входы которых подключены к выходам соответствующих модуляторов напряжения, а вторые силовые к фазам сети, блок управления снабжен управляемым генератором импульсов, задатчиком тока, последовательно соединенными датчиком тока одной из обмоток статора m-фазного электродвигателя, двухвходовым регулятором тока и двухвходовым формирователем закона модуляции, выходы которого образуют выходы распределителя импульсов блока управления, второй вход упомянутого формирователя через управляемый генератор импульсов подключен к задатчику частоты вращения, а выход задатчика тока ко второму входе регулятора тока.
Указанная цель достигается также тем, что в устройстве для управления частотой вращения электродвигателя, содержащем m регуляторов амплитуды напряжения, силовые входы которых соединены с фазами сети, а выходы с соответствующими обмотками m-фазного электродвигателя, а также блок управления, составленный из задатчика частоты вращения и распределителя импульсов, выходы которого подключены к первым управляющим входам регуляторов амплитуды напряжения, регуляторы напряжения выполнены в виде ключей переменного тока, и в него введены m трансформаторов напряжения, а блок управления снабжен задатчиком тока и генератором опорной частоты, последовательно соединенными управляемым генератором импульсов и делителем и последовательно соединенными датчиком тока одной из обмоток m-фазного электродвигателя, двухвходовым регулятором тока и двухвходовым ШИМ-преобразователем, выходы которого подключены к вторым управляющим входам соответствующих ключей переменного тока, выходами подключенными к первичным обмоткам трансформаторов напряжения, вторые выводы которых соединены с нейтралью сети, а вторичные обмотки упомянутых трансформаторов соединены между собой последовательно согласно в замкнутый контур, причем выход задатчика тока соединен со вторым входом регулятора тока, выход задатчика частоты вращения - со входом управляемого генератора, выход делителя частоты подключен ко входу распределителя импульсов блока управления, а выход генератора опорной частоты ко второму входу ШИМ-преобразователя.
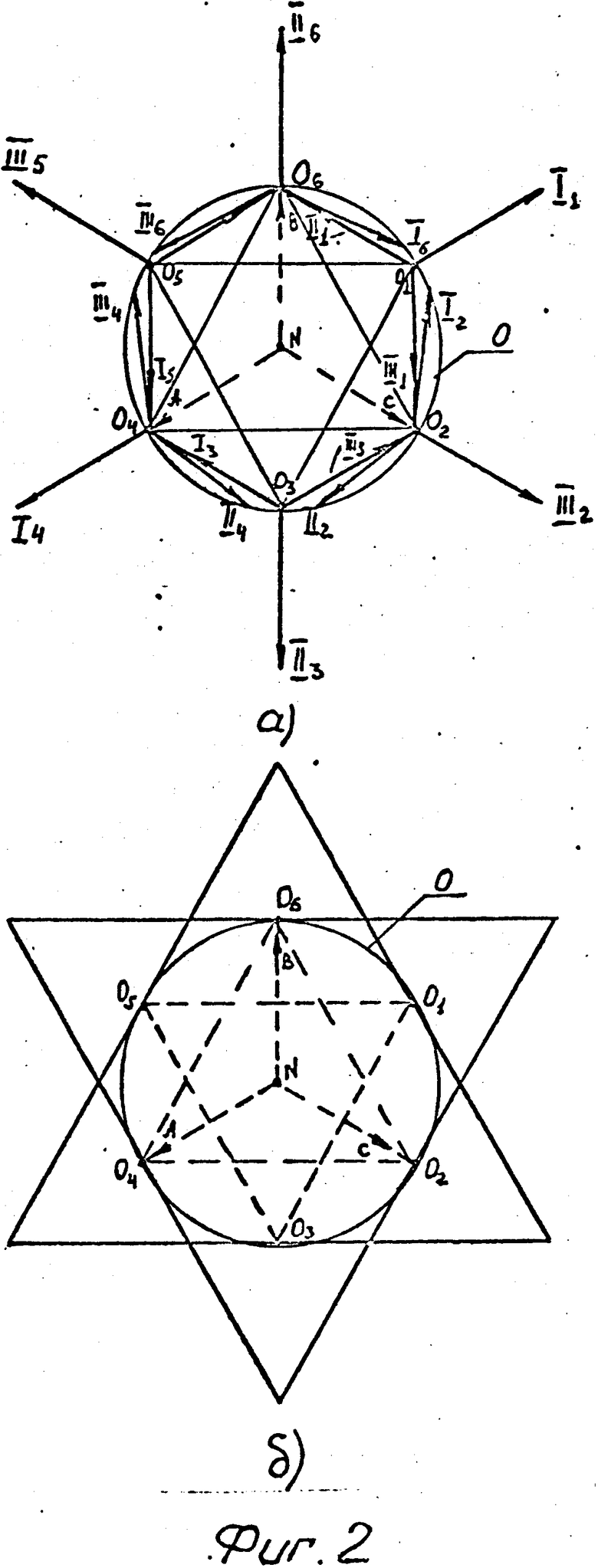
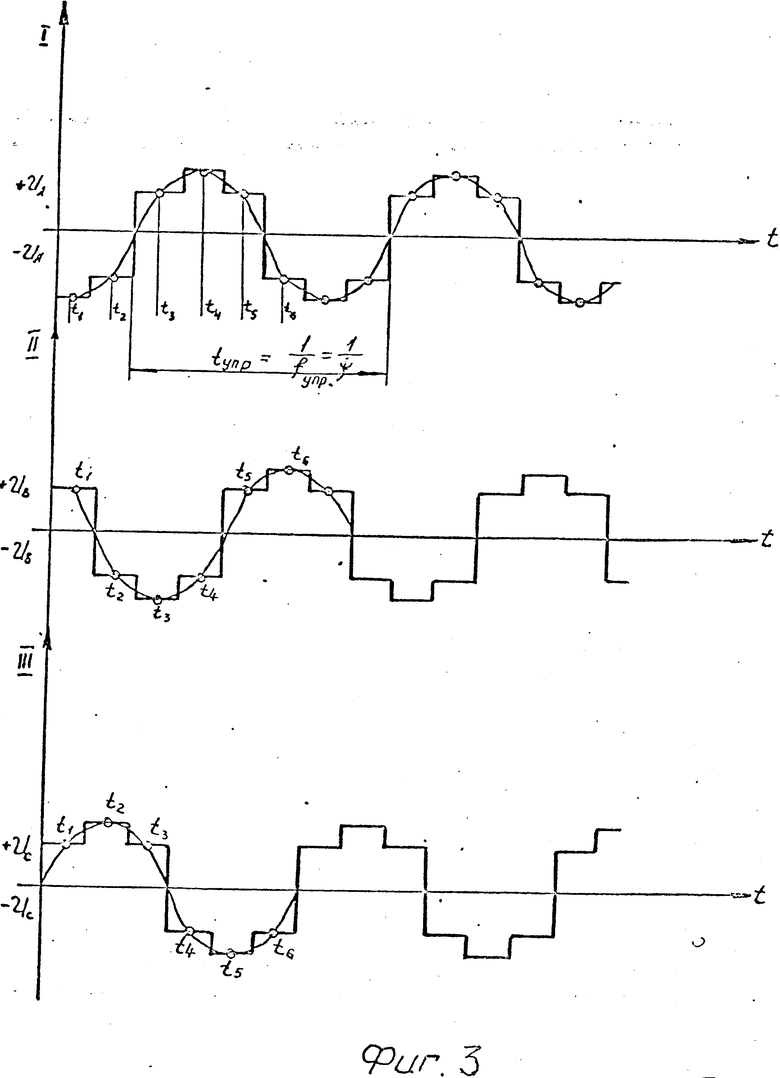
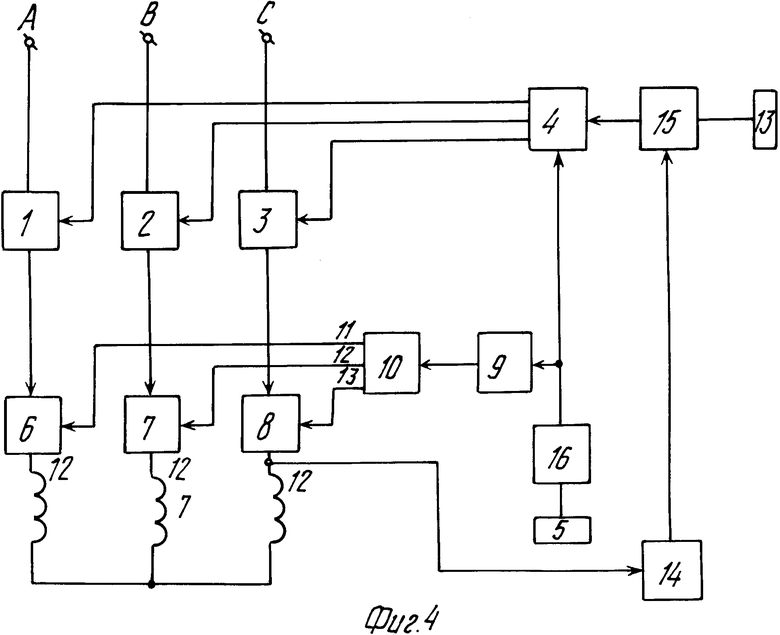
На фиг. 1а представлено графическое изображение статора и ротора, на фиг. 1б график зависимости частоты вращения магнитного поля ротора электродвигателя от частоты принудительного вращения статора; на фиг. 2 - векторная диаграмма напряжений процесса поворота статора в электродвигателе при соединении статорных обмоток звездой и треугольником; на фиг. 3 - временные диаграммы, поясняющие алгоритм управления работой электродвигателя; на фиг. 4 6 структурные схемы устройств, реализующих способ управления частотой вращения трехфазного асинхронного электродвигателя.
Сущность заявляемого способа заключается в следующем.
С целью сохранения оптимальных энергетических характеристик электродвигателя необходимо поддерживать номинальное значение его скольжения во всем диапазоне регулирования скорости. В таком случае воздействие на электродвигатель должно происходить со стороны статора и затрагивать процесс пространственно-временного преобразования исходного трехфазного напряжения во вращающееся магнитное поле.
Последнее условие учитывает связь геометрии электрической машины частоты питающего напряжения и частоты вращения магнитного поля электродвигателя:
где
n0 синхронная частоты вращения магнитного поля (1/с);
f0 частота сети (Гц);
P число полюсов машины.
Поскольку частоты вращения магнитного поля n0 однозначно определяет частоту вращения ротора через значение скольжения, то в дальнейшем будет рассматривать только физику получения вращающегося магнитного поля. Зависимость (1) дает возможность определить для каждой электрической машины, зная параметры обмотки, частоту вращения магнитного поля n0, создаваемого неподвижными обмотками, соединенными с источником, например, трехфазного (A, B, C) исходного симметричного переменного напряжения частотой f0 (см. фиг. 1а):
где
ia, ib, ic мгновенные значения фазных токов электродвигателя;
I0 амплитудное значение токов.
Известно, что вращающееся магнитное поле можно также создать принудительным вращением самих проводников с током или в данном случае статорных обмоток. Осуществить это можно, например, при помощи контактных колец со щетками, принудительно вращая статор рассматриваемого электродвигателя посторонним приводом с возможностью регулирования угловой скорости статора nc. Обмотки статора создают в этом случае вращающееся магнитное поле с частотой вращения nc, которое может совпадать и не совпадать с направлением вращающего магнитного поля n0 (фиг. 1а). В результате в воздушном зазоре электродвигателя появится вращающее магнитное поле с частотой вращения n, равной сумме или разности частот вращения магнитного поля неподвижных обмоток n0 и принудительного вращения статора nc:
n n0±nc. (5)
Тогда, изменяя угловую скорость принудительного вращения статора, можно управлять частотой вращения n суммарного магнитного поля по зависимости (5). Подавая разные значения nc, можно не только изменять частоту вращения n суммарного магнитного поля вверх и вниз от синхронной n0, но и останавливать его (nc n0), а также изменять направление вращения (nc>n0) эффект реверса (см. фиг. 1б).
Для получения математической модели вращения обмоток статора и нахождения физического эквивалента вращения статора в пространстве рассмотрим изменение электрических параметров обмоток статора в неподвижном пазу (фиг. 1а), вращая мысленно обмотки статора против часовой стрелки с угловой скоростью.
В начальный момент времени в обмотке А течет ток, обусловленный напряжением этой фазы в соответствии с зависимостью (2):
i1= i
Пусть к моменту времени t1 обмотки статора повернутся на угол nc• Δ t1, равный зубцовому делению статора (фиг. 1а), таким образом, что в пазу 1 окажется обмотка B. В обмотке B течет ток, обусловленный напряжением этой фазы в соответствии с (3):
iI= i
Сравнивая (6) и (7), нетрудно заметить, что поворот обмоток статора на зубцовое деление соответствует смещению фазы кривой тока обмотки в непосредственном пазу 1 на 120o. Следующий поворот обмоток на зубцовое деление сдвинет фазу кривой тока в пазу 1 еще на 120o или в соответствии с (4) по отношению к начальному моменту всего на 240o:
iI= i
Находим в общем виде, что вращение обмоток статора с угловой скоростью nc соответствует смещению фазы кривой тока в обмотке в неподвижном пазу со скоростью 

Знак "плюс" в выражении (9) соответствует "вращению" статора в противоположном направлении.
Учитывая, что в неподвижном пазу 1 всегда находится неподвижная обмотка A, и перенося свои рассуждения на остальные фазные обмотки B и C, получаем математическую модель электромеханического эквивалентного вращения обмоток статора:
Анализ (10) (12) позволяет сделать следующие выводы:
1. Одновременное смещение фаз кривой электрического тока в обмотках статора асинхронного двигателя со скоростью  эквивалентно вращению обмоток статора в пространстве с частотой вращения ± nc.
эквивалентно вращению обмоток статора в пространстве с частотой вращения ± nc.
2. Смещение фазы кривой переменного тока с частотой f0 в обмотках со скоростью  приводит соответственно к уменьшению или увеличению частоты кривой тока в этих же обмотках по закону
приводит соответственно к уменьшению или увеличению частоты кривой тока в этих же обмотках по закону 
3. Изменяя скорость вращения обмоток статора можно добиться (фиг. 1 б):
увеличения частоты вращения магнитного поля выше синхронной
уменьшения частоты вращения магнитного поля вниз от синхронной
остановки магнитного поля в пространстве 
увеличения частоты вращения от нуля до синхронной и выше в противоположную сторону эффект реверса  Эффект реверса вращения достигается за счет того, что в точке
Эффект реверса вращения достигается за счет того, что в точке  фазы кривых токов во всех обмотках в соответствии с (10) (12) переворачиваются на 180o, в связи с чем электродвигатель как бы получает питание от инверсной трехфазной симметричной системы напряжений. В этом заключается физический смысл отрицательной частоты (см. фиг. 1б). На самом деле абсолютные значения результирующей частоты при
фазы кривых токов во всех обмотках в соответствии с (10) (12) переворачиваются на 180o, в связи с чем электродвигатель как бы получает питание от инверсной трехфазной симметричной системы напряжений. В этом заключается физический смысл отрицательной частоты (см. фиг. 1б). На самом деле абсолютные значения результирующей частоты при  находятся выше оси абсцисс и показаны пунктирной линией;
находятся выше оси абсцисс и показаны пунктирной линией;
резкого уменьшения амплитуды кривой токов в обмотках статора до нуля при  провал токов (фиг. 1б).
провал токов (фиг. 1б).
4. Изменение частоты кривой фазных токов обмотки по способу Муляра принципиально отличается от способа управления путем изменения частоты питающего напряжения, в связи с чем у первого появляется много дополнительных функциональных возможностей эффект реверса, провал токов, а также обратная логика работы силовых ключей на участке  Чем меньше частота коммутации силовых цепей, тем выше частота вращения магнитного поля.
Чем меньше частота коммутации силовых цепей, тем выше частота вращения магнитного поля.
С учетом вышеизложенного докажем возможность осуществления управления скоростью вращения обмоток статора электродвигателя простыми техническими средствами.
Для этого найдем координаты (параметры) воздействия на электродвигатель и алгоритм управления ими. Запишем в общем виде уравнение исходной симметричной m-фазной системы согласно (2) (4):
где
U
U0 амплитудное значение напряжения.
Положим, что статорные обмотки электродвигателя соединены звездой и векторная диаграмма его напряжений представлена на фиг. 2а (вектора NA, NB и NC). В этом случае напряжение каждой статорной обмотки определяется разностью напряжений на соответствующей клемме электродвигателя U
Um= U
При этом напряжение общей точки UN равно сумме напряжений mфаз и, следовательно, в соответствии с (14) можно записать:
В нашем случае при симметричной системе, когда сдвиг фаз  UN= ∑ U
UN= ∑ U
Um= U
Действительно, из векторной диаграммы видно, что напряжения обмоток статора равны фазным напряжениям трехфазной исходной системы: NA, NB, NC.
Запишем в общем виде и преобразуем полученную математическую модель (10) (12) электромеханического эквивалента вращения фазных обмоток статора:
Приравняв выражения (19) и (15), получим:
Анализ уравнения (20) показывает, что управляющим воздействием при реализации процесса вращения статора может быть амплитудная модуляция напряжений исходной трехфазной симметричной системы по закону косинуса  При этом смещение напряжений Um обмоток статора по закону (18) будет осуществляться лишь при соблюдении равенства (21). Тогда с учетом выражения (16) доказательством правильности наших предположений является выполнение следующего условия:
При этом смещение напряжений Um обмоток статора по закону (18) будет осуществляться лишь при соблюдении равенства (21). Тогда с учетом выражения (16) доказательством правильности наших предположений является выполнение следующего условия:
Условие (22) выполняется при симметричной модуляции трехфазного исходного напряжения, т.е. при 

Кривую напряжения на клемме электродвигателя (23) можно рассматривать как синусоиду с частотой сети F0, амплитуда которой изменяется по закону:
Таким образом, получен искомый алгоритм (см. фиг. 3). Т.к. амплитуда есть величина положительная, а величина  меняет знак в моменты перехода ее через нуль, то это означает скачкообразное изменение в эти моменты времени фазы синусоидальных колебаний с частотой fo на угол π (инверсия фазы).
меняет знак в моменты перехода ее через нуль, то это означает скачкообразное изменение в эти моменты времени фазы синусоидальных колебаний с частотой fo на угол π (инверсия фазы).
Знак в скобке аргумента определяет порядок чередования фаз, т.е. направление вращения ротора. Скорость  частоту его вращения в соответствии с (1) и (13)
частоту его вращения в соответствии с (1) и (13)
На фиг. 2а показана векторная диаграмма напряжений процесса вращения статора. Вектор напряжения общей точки обмоток UN в данном случае уже не равен нулю: он вращается по или против часовой стрелки вокруг точки N с различной скоростью в зависимости от  в соответствии с (21), имеет амплитуду, равную U0 и, следовательно, описывает окружность "О". На этой окружности условно зафиксированы по часовой стрелке шесть точек O1-О6, соответствующие моментам времени t1-t6 на кривой управляющего напряжения (фиг. 3). В этих же точках изображены мгновенные векторные диаграммы напряжений статорных обмоток I, II, III (см. фиг. 2а). Видно, что вектора напряжений обмоток Um в соответствии с (18) и (19) одновременно смещают фазы при переходе с одной точки на другую на одинаковый угол (в данном случае
в соответствии с (21), имеет амплитуду, равную U0 и, следовательно, описывает окружность "О". На этой окружности условно зафиксированы по часовой стрелке шесть точек O1-О6, соответствующие моментам времени t1-t6 на кривой управляющего напряжения (фиг. 3). В этих же точках изображены мгновенные векторные диаграммы напряжений статорных обмоток I, II, III (см. фиг. 2а). Видно, что вектора напряжений обмоток Um в соответствии с (18) и (19) одновременно смещают фазы при переходе с одной точки на другую на одинаковый угол (в данном случае  ), сохраняя симметричную системы напряжений. Это эквивалентно вращению статора с обмотками в пространстве. При этом вектора напряжений вращаются в противоположную сторону, т.е. против часовой стрелки, что означает увеличение (уменьшение) частоты напряжения в общей точке обмоток UN в процессе уменьшения (увеличения) частоты напряжений в обмотках статора Um. Действительно, в формулах (18) и (21) знаки в скобках аргумента противоположны.
), сохраняя симметричную системы напряжений. Это эквивалентно вращению статора с обмотками в пространстве. При этом вектора напряжений вращаются в противоположную сторону, т.е. против часовой стрелки, что означает увеличение (уменьшение) частоты напряжения в общей точке обмоток UN в процессе уменьшения (увеличения) частоты напряжений в обмотках статора Um. Действительно, в формулах (18) и (21) знаки в скобках аргумента противоположны.
На фиг. 3 показано дискретное приближение алгоритма управления (24), соответствующее выбранному интервалу t1-t6. Знак минус при величинах UA, UB, UC означают смену фазы питающего напряжения на π
Таким образом, эффективно управлять частотой вращения ротора асинхронного электродвигателя можно с помощью регуляторов переменного напряжения, изменяя его амплитуду по алгоритму (24), что приводит к изменению частоты вращения по закону (25). Т.е. такая система значительно проще и надежней известных частотных преобразователей, слуужащих для этих же целей. Причем в данном случае с регуляторами напряжения очень легко реализуется поддержание соотношения (25) с целью ограничения тока электродвигателя и оптимизации его энергетических характеристик.
Рассмотрим возможные варианты построения устройств для реализации способа Муляра на примере устройства регулирования частоты вращения трехфазного электродвигателя (m 3).
Устройство для реализации способа Муляра регулирования частоты вращения трехфазного электродвигателя по первому варианту содержит три регулятора 1 3 амплитуды напряжения (фиг. 4), силовые входы которых соединены с соответствующими фазами A, B и C сети, блок управления, снабженный распределителем импульсов 4, первый, второй, третий выходы которого подключены к управляющим входам первого, второго и третьего регуляторов 1 3 амплитуды напряжения, и задатчиком 5 частоты вращения. В устройство введены три инвертора 6 8 и последовательно соединенные делитель 9 частоты и распределитель 10 импульсов, выходами 11 подключенный к управляющим входам инверторов 6 8, силовые входы которых соединены с выходами регуляторов 1 3 амплитуды напряжения, а выходы с соответствующими выводами 12 статорной обмотки 7 электродвигателя. Блок управления снабжен задатчиком 13 тока и последовательно соединенными датчиком 14 одной из статорной обмотки 7 электродвигателя и двухвходовым регулятором 15 тока, выходом подключенным к первому входу распределителя 4 импульсов, а вторым входом к выходу задатчика 12 тока, и управляемым генератором 16 импульсов, входом подключенным к выходу задатчика 5 частоты вращения, а выходом к входу делителя 9 частоты и второму входу распределителя 4 импульсов блока управления.
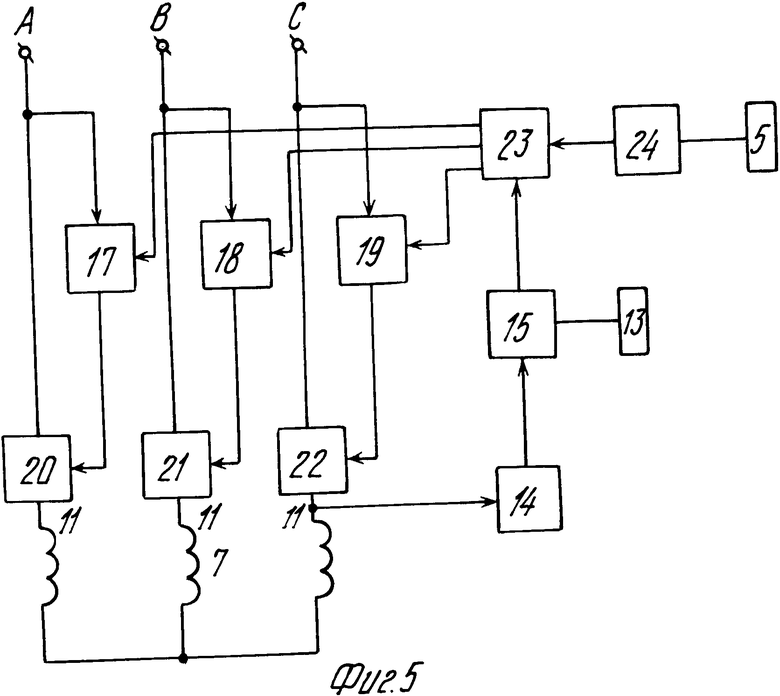
В соответствии со вторым вариантом в устройстве для реализации способа Муляра регулирования частоты вращения регуляторы амплитуды напряжения выполнены в виде трех модуляторов 17 19 напряжения, (фиг. 5), силовые входы которых соединены с фазами A, B и C сети. В устройство введены три сумматора 20 22, первые силовые входы которых соединены с фазами A, B, C сети соответственно, вторые силовые входы с выходами модуляторов 17 19 напряжения, а выходы с выводами 12 статорной обмотки 7 электродвигателя. В блоке управления устройства распределитель импульсов выполнен в виде двухвходового формирователя 23 закона модуляции напряжения. Кроме того блок управления снабжен управляемым генератором 24 импульсов, задатчиком частоты вращения 5, задатчиком тока 13, последовательно соединенными датчиками 14 тока одной из обмоток статора электродвигателя и двухвходовым регулятором 15 тока. Первый вход формирователя 23 закона модуляции напряжения через управляемый генератор 24 импульсов подключен к выходу задатчика 5 частоты вращения, второй вход к выходу регулятора тока 15, второй вход которого соединен с выходом задатчика 13 тока.
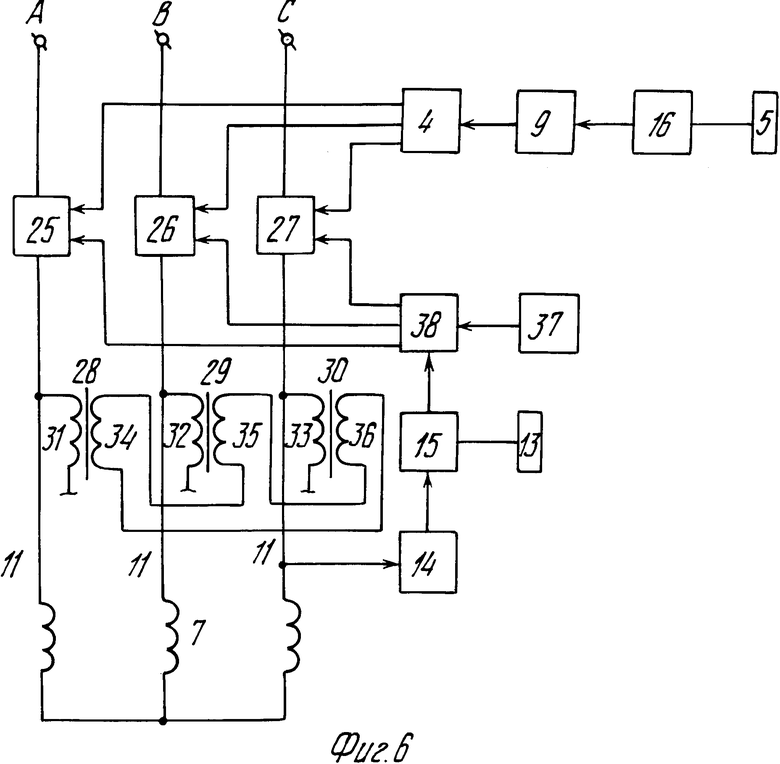
В устройстве для реализации способа Муляра регулирования частоты вращения электродвигателя согласно третьему варианту регуляторы амплитуды напряжения выполнены в виде трех ключей 25 27 переменного тока с двумя управляющими входами, силовые входы которых соединены с соответствующими фазами A, B и C сети, а выходы с соответствующими выводами 12 статорной обмотки 7 электродвигателя. Блок управления снабжен задатчиком частоты 5 вращения и распределителем 4 импульсов, выходы которого подключены к первым управляющим входам ключей 25 27 переменного тока. В устройство введены три трансформатора 28 30 с первичными обмотками 31 33 и вторичными обмотками 34 36. Первые выводы первичных обмоток 31 33 соединены с выходами ключей переменного тока 25 27, а их вторые выводы с нейтралью сети. Вторичные обмотки 34 36 указанных трансформаторов соединены последовательно согласно в замкнутый контур. Блок управления снабжен последовательно соединенными управляемыми генератором 16 импульсов и делителем 9 частоты, задатчиком скорости 5, задатчиком тока 13, генератором 37 опорной частоты, последовательно соединенным датчиком 14 тока одной из обмоток 7 электродвигателя, двухвходовым регулятором 15 тока и двухвходовым ШИМ-преобразователем 38, выходы которого подключены ко вторым управляющим входам ключей 25 27 переменного тока. Выход задатчика 13 тока соединен со вторым входом регулятора 15 тока, выход задатчика 5 частоты со входом управляемого генератора 16 импульсов, выход делителя 9 частоты со входом распределителя 4 импульсов, а выход генератора 37 опорной частоты подключен ко второму входу ШИМ-преобразователя 38.
Устройство (фиг. 4) работает следующим образом.
Работой регуляторов 1 3 амплитуды напряжения управляет распределитель 4 импульсов, который может быть выполнен на базе постоянного запоминающего устройства, на один вход которого поступает корректирующий сигнал с выхода регулятора 15 тока, который сравнивает два синусоидальных сигнала: один от датчика 14 тока, т. е. реальную кривую переменного тока, протекающего по одной из обмоток 7, а другой от задатчика 13 тока сформированную кривую заданного значения тока правильной синусоидальной формы и необходимой амплитуды. На второй вход распределителя импульсов поступает последовательность импульсов, которую вырабатывает управляемый генератор 16 импульсов с частотой, которая определяется задатчиком 5 скорости. При этом включение и выключение инверторов 6 8 посредством распределителя 10 импульсов, в качестве которого может быть использован регистр, например, 155 ИР1, осуществляется согласованно с переключением регуляторов 1 3 амплитуды напряжения, благодаря синхронизации от управляемого генератора 16 импульсов. Следует отметить, что при отключенной цепи управления, куда входят блоки 4, 5, 13, 14, 15, 16, электродвигатель имеет синхронную угловую скорость. Легко видеть, что с помощью упомянутых блоков регуляторы 1 3 амплитуды напряжения и инверторы 6 7 позволяют изменить амплитуду питающего напряжения по алгоритму (24), что ведет к изменению частоты вращения электродвигателя по закону (25).
Принцип работы устройства по второму варианту (фиг. 5) аналогичен предыдущему. Отличие заключается в том, что процесс дискретного переключения обмоток 7 электродвигателя решается путем модуляции напряжения в модуляторах 17 19 сигналом, поступающим из формирователя 23 закона модуляции с последующим суммированием промодулированного сигнала с сигналом питающего напряжения в сумматорах 20 22, что в итоге позволяет исключить инверторы из устройства.
Принцип работы третьего (фиг. 6) устройства аналогичен двум предыдущим. Отличие заключается лишь в том, что процесс реализации изложенного выше алгоритма, описанного выражениями (23) (25), осуществляется дискретно во времени за счет применения дискретного включения и выключения ключей 25 27 переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1985 |
|
SU1309243A1 |
| Способ управления частотой вращения трехфазного асинхронного электродвигателя и устройство для его осуществления | 1986 |
|
SU1709488A1 |
| Электропривод переменного тока | 1987 |
|
SU1494192A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |
| Способ управления непосредственным преобразователем частоты для регулируемого электропривода с широтно-импульсным регулированием (шир) выходного напряжения и непосредственный преобразователь частоты для регулируемого электропривода | 1978 |
|
SU858200A1 |
| Вентильный электродвигатель | 1986 |
|
SU1328891A2 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
| Автоматический регулятор возбуждения для асинхронного электродвигателя с фазным ротором | 1980 |
|
SU928595A1 |
Использование: для регулирования частоты вращения m-фазного электродвигателя. Сущность: в способе управления m-фазным асинхронным электродвигателем, обмотки статора которого подключают через регуляторы амплитуды напряжения к сети напряжения Vо и частотой ω , в момент переключения обмоток статора одновременно смещают фазы токов в обмотках статора со скоростью, определяемой из выражения: ±ψ = n - ω и изменяют в подключенной обмотке статора мгновенное значение подводимого к ней напряжения по закону Um = 2Uosin(ωt - 2πm/3)cos(ψt ∓ 2πm/3), где n - частота вращения ротора; ψ - скорость смещения фаз токов в обмотках статора; Vm - мгновенное значение подводимого к обмоткам статора напряжения; ω - частота напряжения питающей сети. 4 с.п.ф-лы. 6 ил.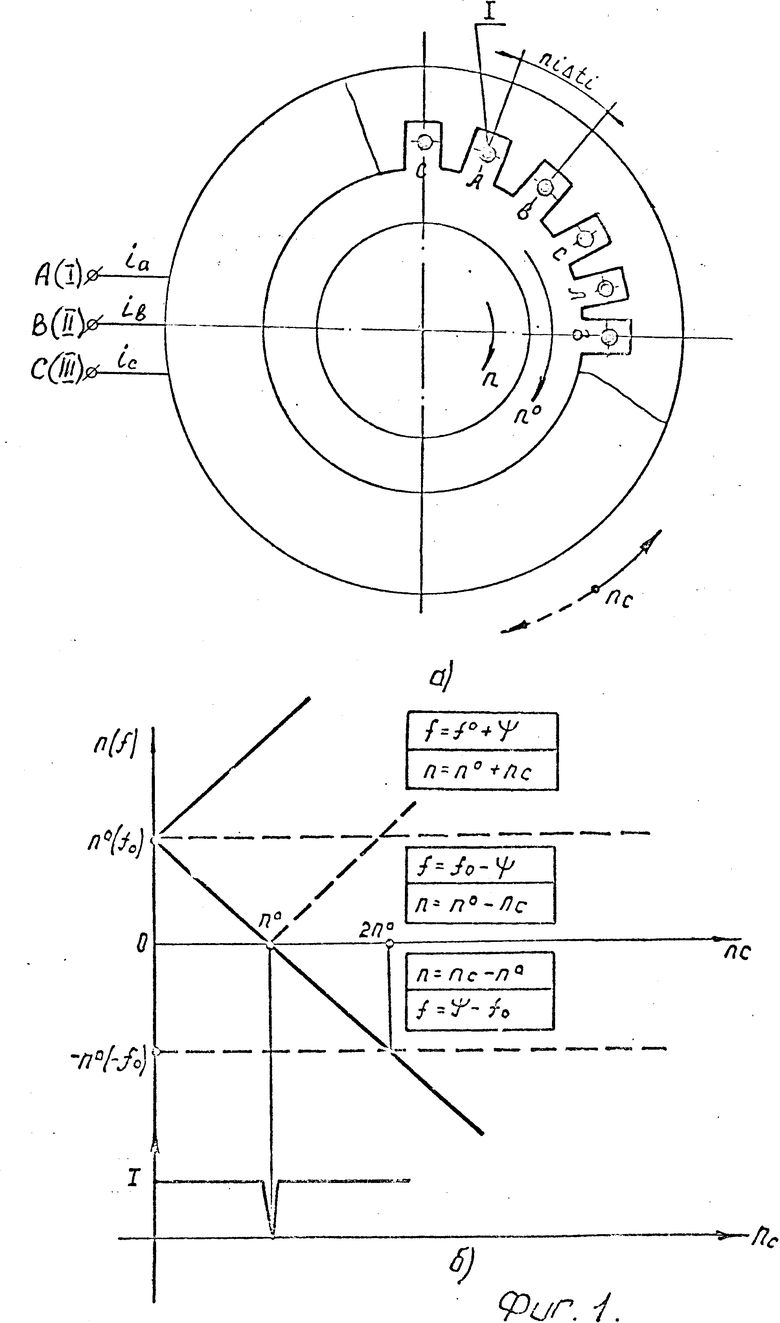

и изменяют в подключенной обмотке статора мгновенное значение подводимого к ней напряжения по закону
где n частота вращения ротора; скорость смещения фаз токов в обмотках статора;
скорость смещения фаз токов в обмотках статора;
Um мгновенное значение подводимого к обмоткам статора напряжения;
w частота напряжения питающей сети;
U0 амплитудное значение подводимого к обмоткам статора напряжения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М.Г.Чиликин, Л.С.Сандлер | |||
| Общий курс электропривода, М., Энергия, 1981, с.170 - 171 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N | |||
