1
ИзобретеЕ1ие относится к электротехнике, может быть использовано в
электроприводах с вентильными электродвигателями на основе асинхронных машин с фазньм ротором и является усовершенствованием устройства по авт.св. № 1267545.
Цель изобретения - повышение перегрузочной способности за счет компен- сации реакции якоря в обоих направлениях вращения.
На чертеже изображена блок-схема вентильного электродвигателя.
Вентильньй электродвигатель содержит асинхронную машину 1 с фазньм
ротором, статорные обмотки 2-4 которой соединены в звезду или треугольник. Роторные выводы асинхронной машины подключены к преобразователю 5 частоты, который питается от сети. Преобразователь 5 частоты может быть выполнен со звеном постоянного тока или с непосредственной связью. На вход преобразователя 5 частоты включен выход системы 6 импульсно-фазово- го управления, вход которой соединен с выходом датчика 7 положения ротора.
Источник напряжения возбуждения электродвигателя представляет собой управляемый трехфазный мостовой выпряМИТ ель 8, имекиций два раздельных канала 9 и 10 системы импульсно-фазо- вого управления, выходы которых подключены к управляющим электродам, соответственно, анодной и катодной групп вентилей. Выходные зажимы выпрямителя подключены к выводам обмоток 2 и 3 статора, а вывод статорной обмотки 4 подключен к нулевой точке сети или трансформатора, питающего выпрямитель.В состав вентильного электродвигателя входит также система регулирования,состоящая из датчика 11 частоты вращения, регулятора 12 частоты Вращения, датчика 13 тока якоря, регулятора 14 тока якоря, за- датчика 15 начальных токов фаз статора, регуляторов 16 и 17 тока фаз статора, датчиков 18 и 19 тока фаз статора и задатчика 20 частоты вращения. Дополнительно вентильный электродвигатель содержит блок 21 вьще- ения модуля, пороговьй элемент 22, D-триггер 23, датчик 24 нулевого тока якоря, датчик- 25 направления враения, два суммирунлцих масштабных силителя 26 и 27 и два управляемых кюча 28 и 29 с двумя силовыми входа1328891
0
5
0
ми каждый.Система 6 импульсно-фазо- вого управления преобразователем 5 частоты допо/у1И л ельно снабжена входом 30 реверса, подключенным к выходу D-триггера 23, к В- входу которого подключен выход порогового элемента 22, а к входу синхронизации подключен выход датчика 24 нулевого тока, вход которого подключен к датчику 13 тока якоря. Вход порогового элемента 22 подключен к выходу регулятора 12 частоты вращения.Первые входы суммирующих масштабных усилителей 26 и 27 соединены с выходом задатчика 15 начальных токов фаз, их вторые входы - с выходом блокг 21 выделения модуля, а выход каждого усилителя 26(27) - с соответствую11р1м силовым входом пе-с реключателей 2Н и 29, выход переключателя 28 соединен с входом регулятора 16 тока, выход переключателя 29 - с входом регулятора 17 тока.
Управляющие входы переключателей 5 28 и 29 объединены и подключены к выходу датчика 25 направления вращения, вход которого подключен к выходу датчика 11 частоты вращения; вторые входы суммирующих масштабных усилителей 26 и 27 объединены и подключены к выходу блока 21 выделения модуля, который включен в цеп1 регулирования частоты вращения последовательно с выходом регулятора 12 частоты вращения.
Вентильный электродвигатель работает следующим образом.
Сигнал заданной частоты вращения от задатчика 20 подается на вход регулятора 12 частоты вращения, на выходе которого формируется сигнал задания тока якоря, поступающий через блок 21 выделения модуля на вход регулятора 14 тока якоря. На входы указанных регуляторов подаются сигналы с обратных связей, соответственно с датчика 11 частоты вращения и датчика 13 тока якоря. Выходное напряжение последнего имеет всегда одну полярность. Этим объясняется необходимость установки на входе контура регулирования тока якоря блока 21 вьщеления модуля.
Таким образом, управление частотой вращения электродвигателя осуществляется в системе подчиненного регулирования по рассогласованию между действительной и заданной частотами вращения. Сигнал с выхода регулятора 13 тока якоря, поступая на один
0
5
0
0
5
313
из входов системы 6 импульсно-фазово- го управления, задает угол отпирания вентилей преобразователя 5 частоты относительно напряжения сети. Угол /Sj опережения отпирания вентилей преобразователя 5 частоты относительно. ЭДС холостого хода якоря задается также системой 6 импульсно-фазового управления в функции сигнала датчика 7 положения ротора.
Компенсацию реакции якоря в вентильном электродвигателе обеспечивают два независимых контура регулирования токов фаз обмоток 2 и 3 стато- ра, при этом ток в третьей фазе формируется как алгебраическая сумма (с обратным знаком) токов в двух других фазах.
Токи в фазных обмотках 2-4 за- висят от величины углов управления вентилями анодной и катодной групп выпрямителя 8. Эти углы формируют два канала 9 и 10 системы импульсно- фазового управления выпрямителя 8 в функции выходных сигналов регуляторов 16 и 17. Последние могут иметь пропорциональную или интегрально-пропорциональную структуру и выполняются на базе операционных усилителей, охваченных обратными связями.
Задающие сигналы дпя каждого из регуляторов 16 и 17 форьшруются на выходах суммирующиХ). масштабных усилителей 26 и 27 как алгебраическая сумма сигналов задания тока якоря и задания начального тока фаз статора. Указанные задающие сигналы поступают на входы регуляторов 1б и 17 через управляемые ключи 28 и 29. Следова- тельно, ток каждой из фаз статора также содержит две составляющие, одна из которых постоянна, а другая пропорциональна току якоря. Результирующая МДС статора, равная геометри- ческой сумме сдвинутых друг относительно друга на 120 эл.град. МДС трех фаз также содержит две составляющие: постоянную МДС возбуждения, определяемую задат Шком 15, и изменяющуюся пропорционально амплитуде тока якоря МДС компенсации реакции якоря. При этом направления векторов МДС возбуждения И ВДС компенсации не совпадают, они сдвинуты в пространстве друг относительно друга на постоянный угол, величина которого определяется соотношением коэффициентов передачи мгцпстабных операционных усилителей
1. 26л 27. При управлении преобразователем частоты вентильного электродвигателя по закону /Зв const угол сдвига фазы основной гармоники МДС реакции якоря относительно МДС воз- бз ждения постоянен и равен ftc (без учета угла коммутации j ). Следовательно, подобрав соответствующим образом коэффициенты передачи усилителей 26 и 27, можно добиться того, что МДС компенсации будет гравна по величине и противоположна по направлению МДС реакции якоря.
Предлагаемая схема обеспечивает возможность работы вентильного двигателя в реверсивном режиме. При реверсе изменяется полярность выходного сигнала регулятора 12 частоты вращения, при этом происходит изменение логического сигнала на выходе порогового элемента 22. Этот логический сигнал подается на D-вход триггера 23. После снижения тока якоря до нуля и появления логической единицы с выхода датчика 24 дулевого тока на .синхронизирующем входе D-триггера 23 . последний перебрасывается. Его выходной сигнал поступает в систему 6 импульсно-фазового управления, обеспечивая требуемый порядок подачи управляющих импульсов на тиристоры преобразователя 5 частоты. При этом привод переходит в режим рекуперативного торможения, а затем разгоняется в другую сторону.
Управление ключами 28 и 29 осуществляется от выходного сигнала датчика 25 направления вращения. Например, при вращении вперед выходной сигнал усилителя 26 поступает на вход регулятора 16 тока фазной обмотки 3 статора, а выходной сигнал усилителя
27- на вход регулятора 17 тока фазной обмотки 2 статора. При вращении назад, наоборот, выходной сигнал
..усилителя 26 подается на вход регулятора 17, а усилителя 27 .- на вход регулятора 16. Это позволяет обеспе- - чить один и тот же требуемый закон регулирования МДС индуктора независимо от направления вращения.
Таким образом, в вентильном электродвигателе обеспечивается компенсация реакции якоря и по амплитуде, и по фазе в обоих направлениях вращения. Это приводит к существенному расширению области применения вентильного электродвигателя, поскольку
.513288916
позволяет использовать его в реве.р-ты снабжена входом реверса, подклюсивных электроприводах.ценным к выходу D-триггера, к D-входу
которого подключен выход порогового
Формула изобретенияэлемента, а к входу синхронизации
сподключен выход датчика нулевого тоВентильньй электродвигатель пока, вход которого соединен с датчиком
авт.св. N 1267545, отличаю-тока якоря, вход порогового элемента
щ и и с я тем, что, с целью повыше-подключен к выходу регулятора частония перегрузочной способности за счетты вращения, первые входы суммируюкомпенсации реакции якоря в обоих fOщих масштабных усилителей соединены
направлениях вращения, в него допол-с выходом задатчика начальных токов
нительно введены блок вьщеления но-фаз статора,их вторые входы - с выходуля, включенный между регуляторомдом блока выделения модуля, выход кажчастоты вращения и регулятором токакаждого из указанных усилителей соеякоря, пороговый :шемент, D-триггер, 15динен с соответствующим входом- упомядатчик нулевого тока якоря, датчикнутых переключателей, а управляющие
направления вращения, два суммирующихвходы этих переключателей объединены
масштабных усилителя, два управляе-и подключены к выходу датчика направмых переключателя с двумя силовымиления вращения, вход которого подклювходами, а система импульсно-фазово- . 20чей к выходу датчика частоты вращего управления преобразователем часто-ния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
| Вентильный электродвигатель | 1984 |
|
SU1267545A1 |
| Вентильный электродвигатель | 1987 |
|
SU1415347A2 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Электропривод переменного тока | 1988 |
|
SU1615856A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Способ подключения асинхронного электродвигателя к резервному преобразователю частоты | 1989 |
|
SU1683129A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
Изобретение относится к электротехнике. Целью изобретения является човышенне перегрузочной способности. Указанная цель достигается введением в вентильный электродвигатель блока 21 выделения модуЛя, включенного в канал регулирования частоты вращения асинхронного двигателя (АД) 1 с фазным ротором, порогового элемента 22, D-триггера 23, датчика 24 нулевого тока якоря АД 1, обеспечивающих формирования сигнала реверса АД 1, двух суммирукщих масштабных усилителей 26, 27 с управляемыми переключателями 28, 29, включенными в соответствующие каналы 9, 10 системы импульсно- фазового управления выпрямителем 8 в цепи статорной обмотки АД 1. Введение указанных узлов обеспечивает компенсацию реакции якоря как по амплитуде, так и по фазе в обоих направлениях вращения. 1 ил. ARCO. (Л с 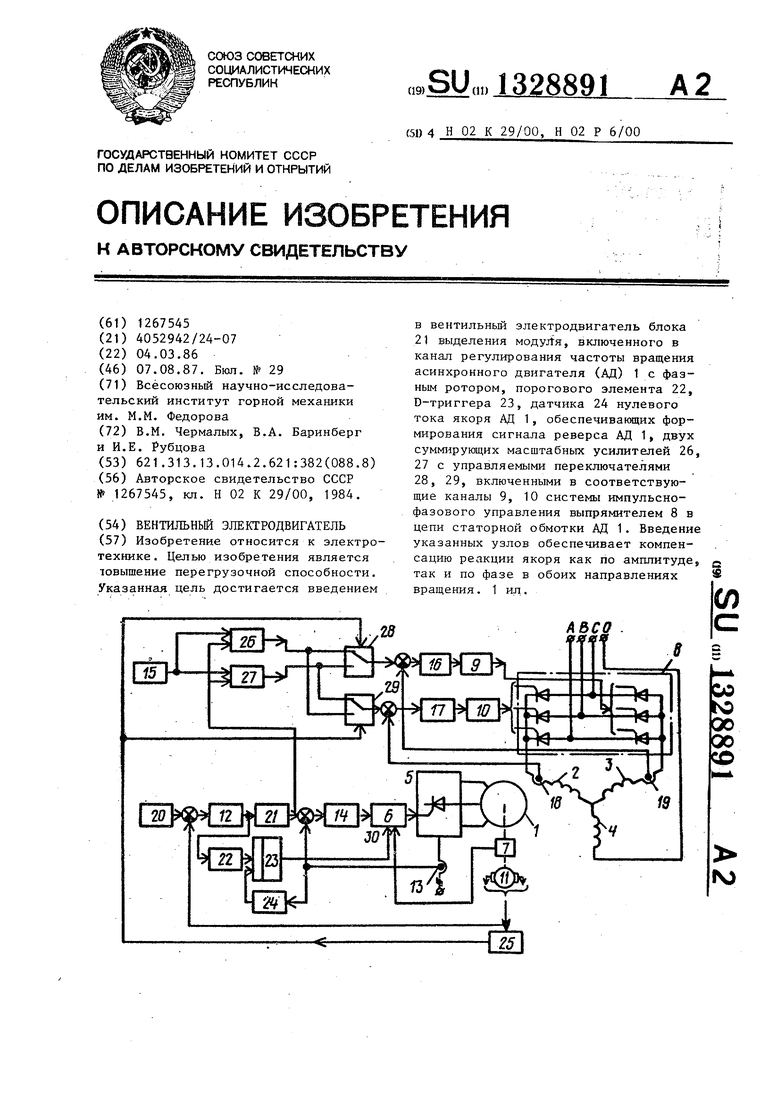
| Вентильный электродвигатель | 1984 |
|
SU1267545A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
