Изобретение относится к транспортному машиностроению, в частности к судовым движителям, и может найти применение в конструкциях осевых насосов, бесшумных осевых вентилятора и в авиации.
Известен принятый в качестве ближайшего аналога судовой движитель, содержащий приводимый во вращение от вала привода ротор, имеющий жестко связанную с валом привода ступицу с обтекателем и закрепленные на ступице гидродинамические поверхности в виде аксиально расположенных одна в другой и разделенных промежуточными обечайками лопаточных решеток с расположенным на периферии гидродинамических поверхностей и закрепленным на них профилированным в меридиональном сечении кольцом (SU, авторское свидетельство N 1283155, кл. B 63 H 1/16, 1987).
Известная конструкция судового движителя имеет недостатки, заключающиеся в низкой кавитационной устойчивости, в пониженном КПД, в высоком акустическом шуме и низком ресурсе.
Предложенное изобретение предназначено для устранения недостатков, присущих ближайшему аналогу.
Технический результат достигается тем, что в судовом движителе с признаками, присущими ближайшему аналогу, лопаточные решетки выполнены оседиагональными со степенью диагональности, увеличивающейся от периферии к центру, а количество лопаток, имеющих в пределах отдельной решетки постоянную толщину и заостренные входные и выходные кромки, выполнено увеличивающимся от центра к периферии, при этом образованные поверхностями кольца, обечаек, ступицы и лопаток межлопаточные каналы имеют площадь поперечного сечения, увеличивающуюся от входа к выходу, а текущий угол установки лопаток в пределах отдельной решетки, равный для расчетного режима работы движителя углу натекания потока на входе решетки при соблюдении коллинеарности вектора абсолютного ускорения среды вектору ее относительной скорости, выполнен постоянным по своей величине по всей длине канала.
Дополнительно технический результат достигается за счет того, что профилированное кольцо, промежуточные обечайки и поверхность ступицы ротора имеют по осевой длине после лопаток продолжения, образующие в комплексе радиально-спрямляющий аппарат и оканчивающиеся цилиндрическими участками, образующими друг с другом попарно кольцевые щели, площадь поперечного сечения каждой из которых меньше площади поперечного сечения входа соответствующей решетки и равными в сумме величине, при которой объемный расход потока, протекающего на расчетном режиме работы через движитель, равен произведению площади поперечного сечения входа в движитель на скорость движения судна.
Для расширения диапазона бескавитационной работы по расходу среды через движитель при фиксированном числе оборотов ротора последний может быть установлен в цилиндрическую насадку, имеющую на входе перед ротором неподвижный или регулируемый направляющий аппарат, за ротором - неподвижный радиально-спрямляющий и спрямляющий в окружном направлении аппараты, а также устройство регулирования площади сечения кольцевого выхода из движителя, образованного цилиндрической обечайкой и поверхностью обтекателя ступицы кольцевого выхода из движителя, выполненного в виде отклоняющих щитков, кинематически связанных с исполнительным механизмом для установки нулевого угла атаки входных кромок лопаток решеток ротора.
Кроме того, для снижения сопротивления кормового обтекателя ступицы и исключения кавитации на ней при высокой скорости движения судна и малом заглублении движителя по крайней мере один из радиально расположенных элементов спрямляющего аппарата, либо другого силового элемента может быть выполнен полым, а образованный этой полостью канал сообщен с атмосферой и с полостью кормового обтекателя ступицы, сообщающейся со средой с задней стороны обтекателя.
Настоящее изобретение поясняется конкретными примерами, которые, однако, не являются единственно возможными, но наглядно иллюстрируют изобретение. На приведенных чертежах изображено:
на фиг. 1 - схема рабочего процесса обтекания крылевого профиля лопасти обычного винта, показаны переносная и абсолютная скорости;
на фиг. 2 - то же, что на фиг. 1, приведена совмещенная схема треугольников скоростей на входе и выходе обычного винта;
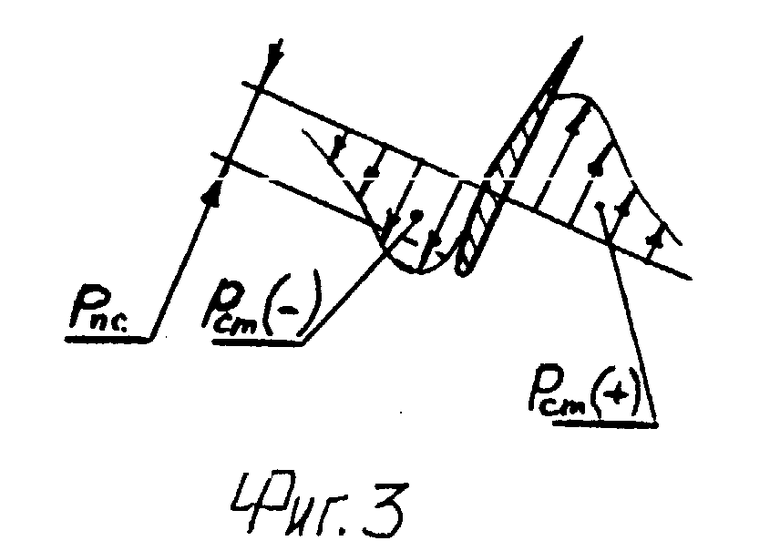
на фиг. 3 - для обычного винта показана неравномерность распределения потенциальной энергии, подводимой к различным частям потока;
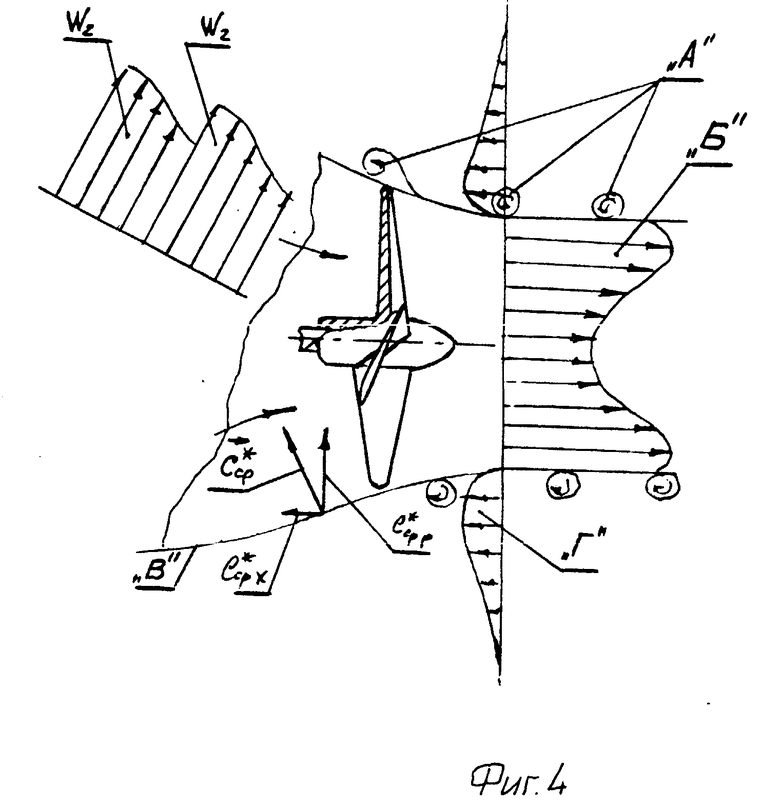
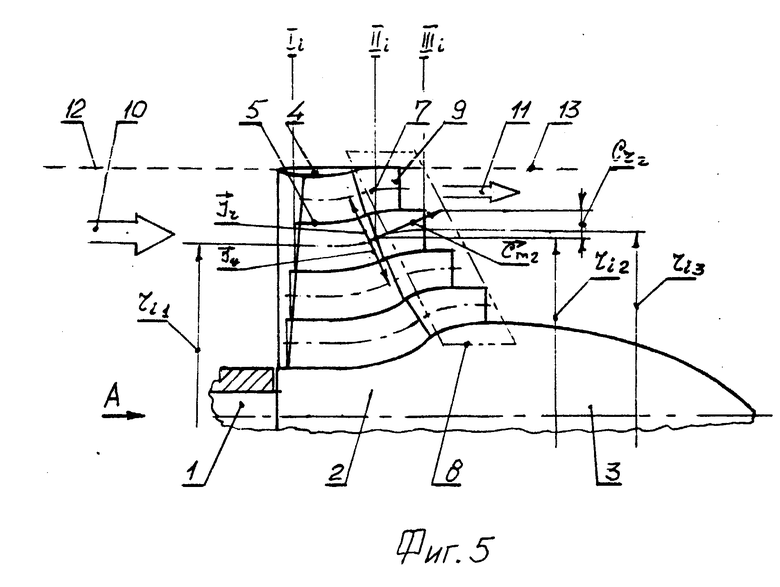
на фиг. 4 - для обычного винта показаны зоны концевых вихрей и типичная форма струи открытого винта; на фиг. 5 представлена конструкция некавитирующего движителя согласно изобретению, первый пример;
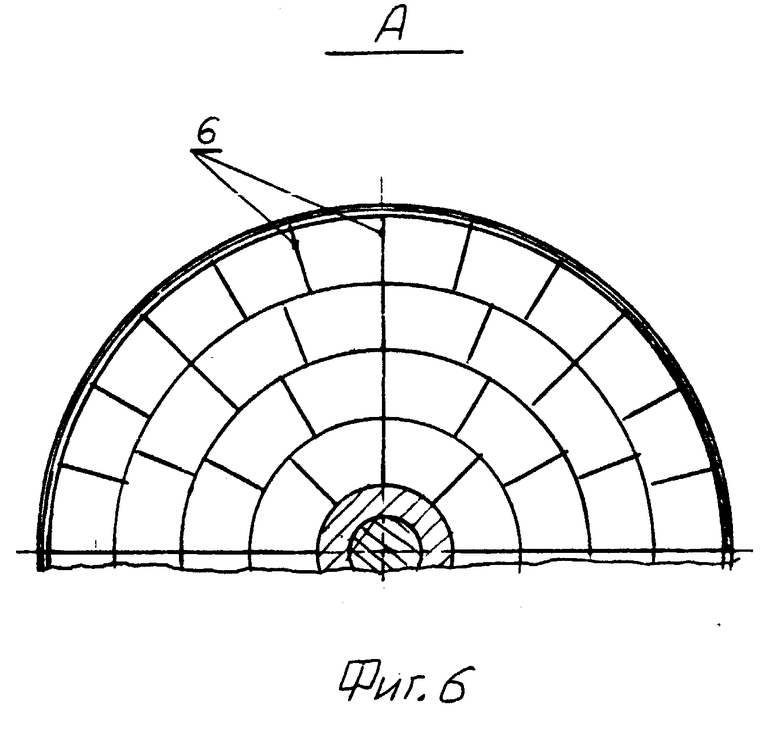
на фиг. 6 - вид А по фиг. 5;
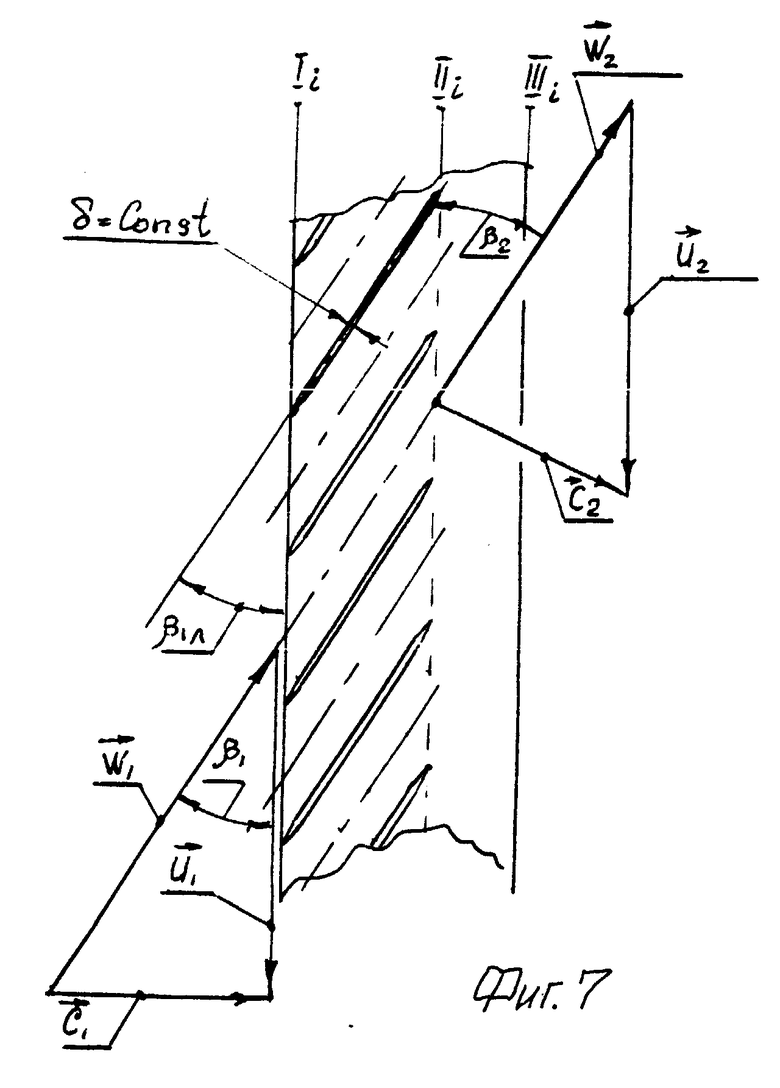
на фиг. 7 представлена развертка лопаточной решетки ротора движителя по фиг. 5;
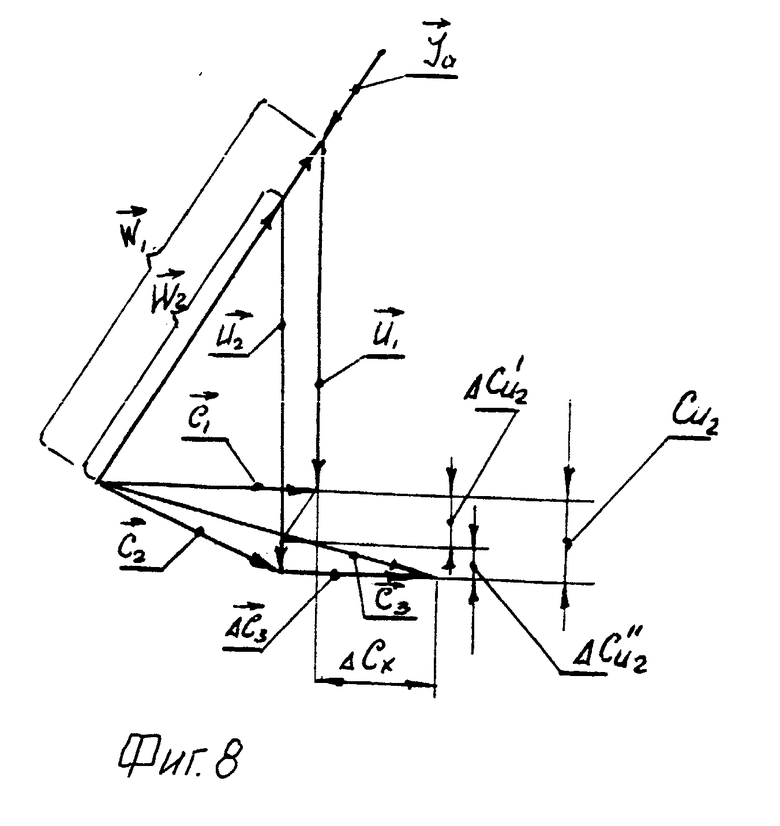
на фиг. 8 показана схема организации рабочего процесса движителя по изобретению;
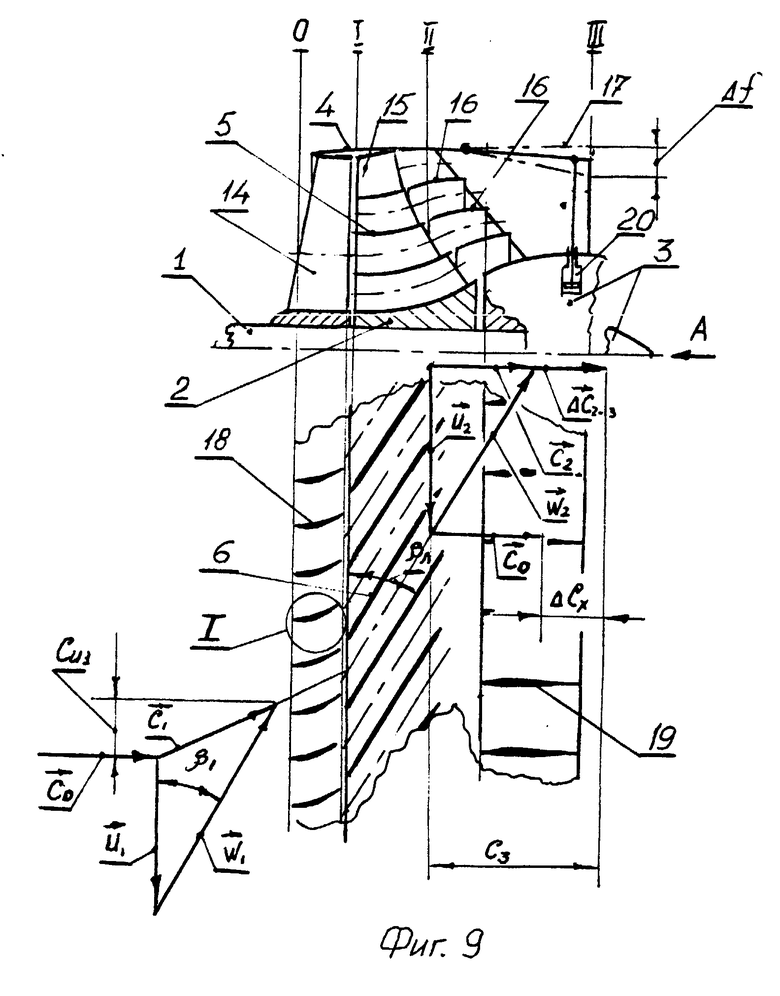
на фиг. 9 представлена конструкция движителя согласно изобретению с регулированием режима работы при переменной нагрузке, второй пример;
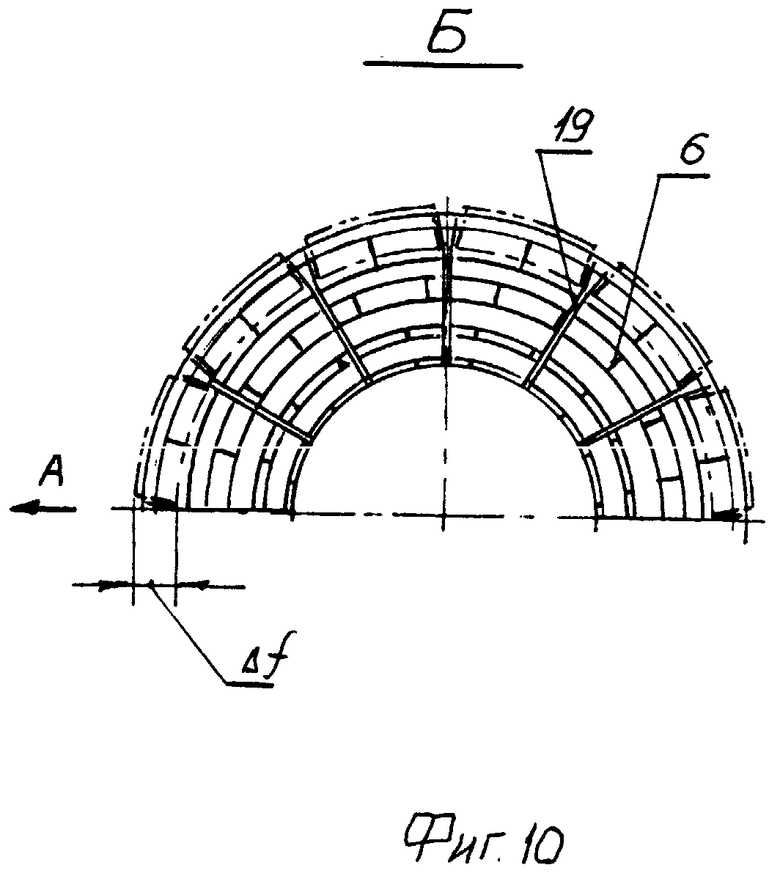
на фиг. 10 - вид Б по фиг. 9;
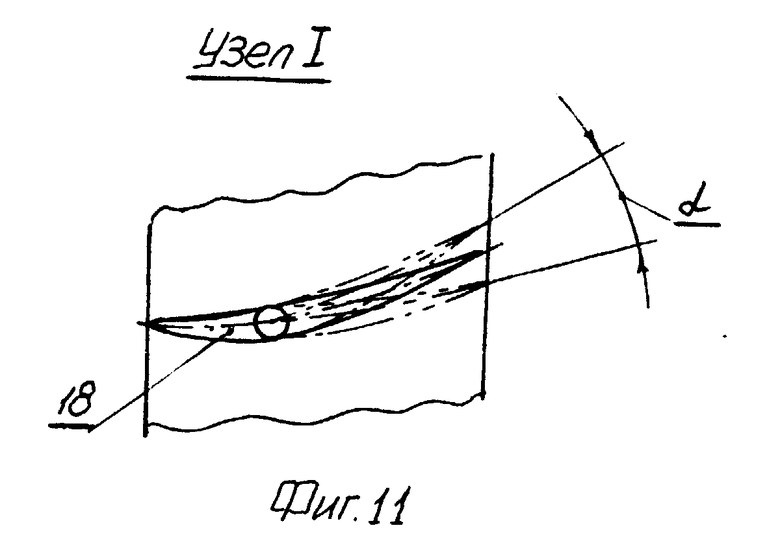
на фиг. 11 - узел 1 на фиг. 9;
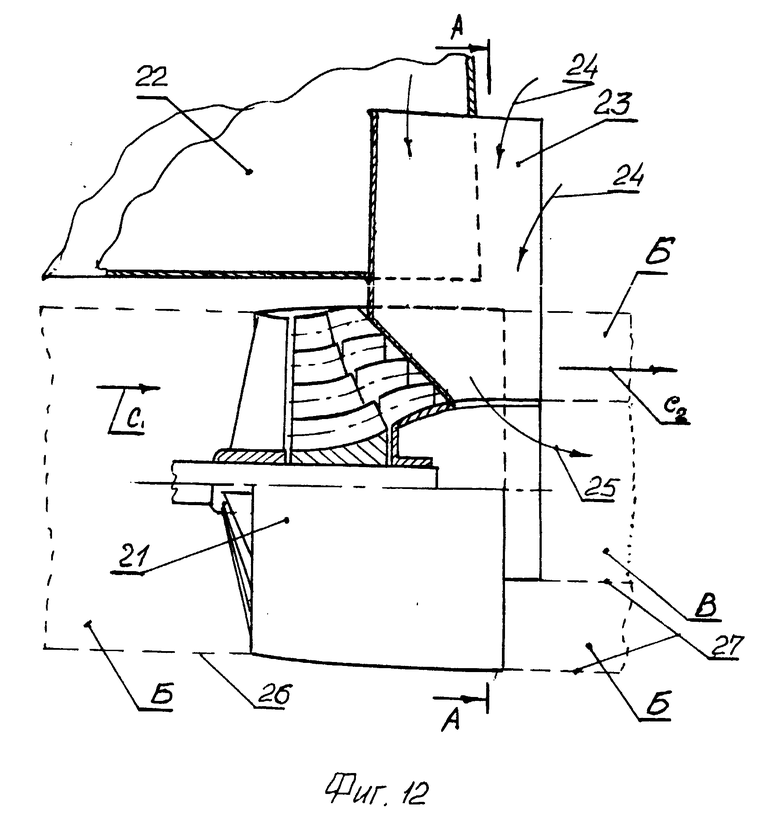
на фиг. 12 - третий пример конструкции движителя по изобретению для скоростного глиссирующего судна с малой глубиной погружения движителя;
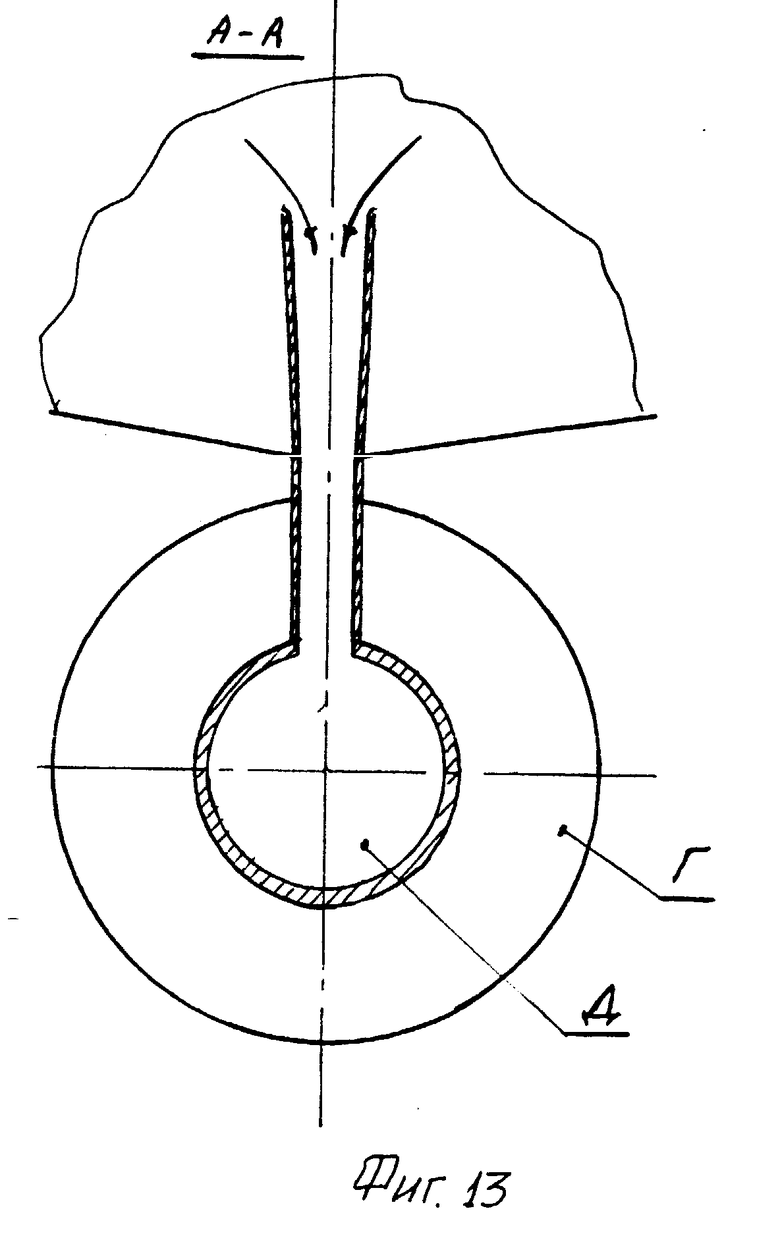
на фиг. 13 - сечение А-А по фиг. 12.
Судовой движитель является осевой лопаточной машиной, поэтому для его анализа применимы уравнения и методы описания лопаточных машин.
Поток (фиг. 1) в сумме двух движений - переносного с окружной скоростью  и абсолютной скоростью
и абсолютной скоростью  - натекает на переднюю кромку лопасти с относительной скоростью
- натекает на переднюю кромку лопасти с относительной скоростью  под углом β1 к плоскости вращения винта. При этом относительно профиля лопасти поток имеет угол атаки δ . Ввиду наличия кривизны профиля лопасти и угла атаки δ направление относительной скорости изменяется от угла β1 до угла β2 к плоскости вращения винта без существенного изменения среднего значения величины относительной скорости
под углом β1 к плоскости вращения винта. При этом относительно профиля лопасти поток имеет угол атаки δ . Ввиду наличия кривизны профиля лопасти и угла атаки δ направление относительной скорости изменяется от угла β1 до угла β2 к плоскости вращения винта без существенного изменения среднего значения величины относительной скорости  .
.
На фиг. 2 приведена совмещенная схема треугольников скоростей на входе и выходе винта. Благодаря развороту вектора  на угол Δβ абсолютная скорость
на угол Δβ абсолютная скорость  получает приращение
получает приращение  , обуславливая величину и направление вектора скорости
, обуславливая величину и направление вектора скорости  . При этом поток в проекции на направление движения - оси X - получит приращение скорости ΔCx , а в проекции на плоскость вращения - приращение окружной скорости CU2. Приращение скорости ΔCx обуславливает величину упора винта, а CU2 - величину закрутки потока на рассматриваемом радиусе. При этом удельная энергия Hэ, подведенная к потоку, определяется уравнением Эйлера:
. При этом поток в проекции на направление движения - оси X - получит приращение скорости ΔCx , а в проекции на плоскость вращения - приращение окружной скорости CU2. Приращение скорости ΔCx обуславливает величину упора винта, а CU2 - величину закрутки потока на рассматриваемом радиусе. При этом удельная энергия Hэ, подведенная к потоку, определяется уравнением Эйлера:
Hэ = U2CU2 - U1CU1.
В рассматриваемом случае при отсутствии закрутки потока на входе CU1 = 0, U1 = U2 и Hэ = U2CU2.
При развороте вектора относительной скорости потока в направлении приращения скорости  на поток накладывается абсолютное ускорение
на поток накладывается абсолютное ускорение  вдоль направления приращения скорости ΔC то есть по нормали к вектору
вдоль направления приращения скорости ΔC то есть по нормали к вектору  . При этом в потоке в зависимости от его положения относительно воздействующего на поток профиля возникают положительный P(+) и отрицательный P(-) градиенты давления (фиг. 3), обуславливая неравномерность потенциальной энергии, подводимой к различным частям потока. На выходе профиля у задней кромки лопасти в зоне равномерного статического давления избыточное давление в потоке соответственно знаку реализуется в соответствующее положительное или отрицательное приращение скорости
. При этом в потоке в зависимости от его положения относительно воздействующего на поток профиля возникают положительный P(+) и отрицательный P(-) градиенты давления (фиг. 3), обуславливая неравномерность потенциальной энергии, подводимой к различным частям потока. На выходе профиля у задней кромки лопасти в зоне равномерного статического давления избыточное давление в потоке соответственно знаку реализуется в соответствующее положительное или отрицательное приращение скорости  (фиг. 3), обуславливая как потери энергии на выравнивание скоростей в процессе смешения, так и колебательное воздействие на внешний поток - акустический шум. На концах лопастей наличие градиентов давления разного знака обуславливает наличие концевых вихрей "А" (фиг. 4). Там же показана эпюра скорости потока на выходе винта, характеризующая радиальную неравномерность "Б". Кроме того, на фиг. 4 показана типичная форма струи открытого винта в осевом сечении "В" и энергетическая составляющая ее сопротивления формы - спутная струя внешнего потока "Г". Спутная струя образуется вследствие деформации внешнего потока движущейся формой струи движителя. При этом на границе взаимодействия скорость деформации внешнего потока определяется вектором
(фиг. 3), обуславливая как потери энергии на выравнивание скоростей в процессе смешения, так и колебательное воздействие на внешний поток - акустический шум. На концах лопастей наличие градиентов давления разного знака обуславливает наличие концевых вихрей "А" (фиг. 4). Там же показана эпюра скорости потока на выходе винта, характеризующая радиальную неравномерность "Б". Кроме того, на фиг. 4 показана типичная форма струи открытого винта в осевом сечении "В" и энергетическая составляющая ее сопротивления формы - спутная струя внешнего потока "Г". Спутная струя образуется вследствие деформации внешнего потока движущейся формой струи движителя. При этом на границе взаимодействия скорость деформации внешнего потока определяется вектором  , который раскладывается на осевую C
, который раскладывается на осевую C
На основании приведенного описания процесса энергообмена винта и среды можно видеть, что кавитация и окружная неравномерность потока присущи самому способу энергообмена типичного крылевого профиля лопасти винта со средой и не могут быть исключены известными способами, обуславливая таким образом наличие определенного предела окружной скорости винта и, как следствие, предела скорости движения судна.
Если в межлопаточных каналах рабочего колеса лопаточной машины на расчетном режиме течения в плоскости действия рабочих ускорений исключить градиентное течение по нормали к траектории движения потока, то исключаются условия возникновения окружной неравномерности потока и зон с пониженным статическим давлением в среде. Это приводит к исключению кавитации. Этот эффект может быть достигнут за счет соблюдения в межлопаточных каналах рабочего колеса условия коллинеарности вектора абсолютного ускорения  , действующего в процессе энергообмена, вектору относительной скорости потока
, действующего в процессе энергообмена, вектору относительной скорости потока  .
.
Некавитирующий судовой движитель по фиг. 5 согласно изобретению содержит вал 1 привода, ступицу 2 ротора, обтекатель 3 ступицы, профилированное кольцо 4, промежуточную обечайку 5, лопатки 6, ось 7 межлопаточного канала в меридиональном сечении, радиально спрямляющий аппарат 8, цилиндрический участок 9 выхода кольцевой щели. Позицией 10 показан вход потока в движитель, а позицией 11 - выход потока из движителя. Граница струи движителя на входе в него на расчетном режиме работы обозначена позицией 12, а граница струи движителя на выходе из него на расчетном режиме работы обозначена позицией 13.
Ii, IIi, IIIi - расчетные сечения соответственно входа, выхода из лопаточной части решетки, выхода i-й решетки; - меридиональная составляющая абсолютной скорости потока на входе лопаток;
- меридиональная составляющая абсолютной скорости потока на входе лопаток;
Ci2 - радиальная составляющая вектора абсолютной скорости на выходе лопаток; - центростремительное ускорение потока вследствие наличия окружной скорости;
- центростремительное ускорение потока вследствие наличия окружной скорости; - центростремительное ускорение потока вследствие разворота вектора Cm в радиальном направлении.
- центростремительное ускорение потока вследствие разворота вектора Cm в радиальном направлении.
На фиг. 7 представлена развертка лопаточной решетки ротора, где βπ - угол установки лопатки, а δ - толщина лопатки.
На фиг. 8 представлена совмещенная схема треугольников скоростей, иллюстрирующая процесс энергообмена движителя со средой. На расчетном режиме поток среды поступает в движитель с абсолютной скоростью C1, равной по величине скорости движения судна. В результате вращения ротора с окружной скоростью i-й решетки  поток входит в межлопаточные каналы с относительной скоростью
поток входит в межлопаточные каналы с относительной скоростью  под углом β1 к плоскости вращения, равным углу β1n установки лопаток, вследствие увеличения площади канала от входа к выходу и диагональности лопаточной решетки на поток накладывается сложная система ускорения, приводимая к единому вектору абсолютного ускорения
под углом β1 к плоскости вращения, равным углу β1n установки лопаток, вследствие увеличения площади канала от входа к выходу и диагональности лопаточной решетки на поток накладывается сложная система ускорения, приводимая к единому вектору абсолютного ускорения  . Благодаря постоянству угла установки лопаток и наличию диагональности направление вектора
. Благодаря постоянству угла установки лопаток и наличию диагональности направление вектора  коллинеарно вектору относительной скорости потока как в окружном, так и в радиальном направлениях. При этом в объеме канала в потоке под воздействием
коллинеарно вектору относительной скорости потока как в окружном, так и в радиальном направлениях. При этом в объеме канала в потоке под воздействием  возрастает статическое давление, что обеспечивает равномерность подвода потенциальной энергии по сечению канала. В результате этого процесса поток на выходе лопаточного участка решетки (сечение II) приобретает скорость
возрастает статическое давление, что обеспечивает равномерность подвода потенциальной энергии по сечению канала. В результате этого процесса поток на выходе лопаточного участка решетки (сечение II) приобретает скорость  , окружную составляющую скорости Cu2, радиальную составляющую скорости Cr2 (фиг. 5) и повышенное статическое давление. При этом окружная скорость является суммой двух составляющих - приращение данной скорости
, окружную составляющую скорости Cu2, радиальную составляющую скорости Cr2 (фиг. 5) и повышенное статическое давление. При этом окружная скорость является суммой двух составляющих - приращение данной скорости  за счет торможения относительной скорости потока в канале и за счет увеличения окружной скорости
за счет торможения относительной скорости потока в канале и за счет увеличения окружной скорости  решетки с U1 и U2 за счет диагональности решения (ri2 > ri1). Удельная энергия, подведенная решеткой к среде, в данном случае выражается уравнением Эйлера для незакрученного потока Hэ = U2CU2, а приращение статического давления - уравнением Бернулли:
решетки с U1 и U2 за счет диагональности решения (ri2 > ri1). Удельная энергия, подведенная решеткой к среде, в данном случае выражается уравнением Эйлера для незакрученного потока Hэ = U2CU2, а приращение статического давления - уравнением Бернулли:  , где ρ - плотность среды, а hr1-2 - потери удельной энергии на участке 1 - 2. На участке радиально-спрямляющего аппарата радиальная составляющая абсолютной скорости Cr2 потока за счет разворота его в меридиональной плоскости в осевое направление на спрямляющих поверхностях дает дополнительное повышение статического давления, обуславливающее некоторое приращение упора движителя. В зоне кольцевых щелей радиально-спрямляющего аппарата вследствие того, что площадь каждой щели меньше площади входа соответствующей решетки, поток преобразует избыточное статическое давление в осевое приращение скорости
, где ρ - плотность среды, а hr1-2 - потери удельной энергии на участке 1 - 2. На участке радиально-спрямляющего аппарата радиальная составляющая абсолютной скорости Cr2 потока за счет разворота его в меридиональной плоскости в осевое направление на спрямляющих поверхностях дает дополнительное повышение статического давления, обуславливающее некоторое приращение упора движителя. В зоне кольцевых щелей радиально-спрямляющего аппарата вследствие того, что площадь каждой щели меньше площади входа соответствующей решетки, поток преобразует избыточное статическое давление в осевое приращение скорости  , в результате которого поток приобретает скорость
, в результате которого поток приобретает скорость  . Разница проекции скорости
. Разница проекции скорости  на ось движения и скорости
на ось движения и скорости  дает приращение ΔCx , обуславливающее упор движителя.
дает приращение ΔCx , обуславливающее упор движителя.
Благодаря тому, что с момента поступления потока в межлопаточные каналы начинается его торможение в относительном движении, а коллинеарность векторов  обеспечивает равномерность этого процесса, в потоке отсутствуют зоны понижения давления независимо от величины окружной скорости решетки. Это обуславливает бескавитационность рабочего процесса движителя на расчетном режиме работы, то есть, когда угол атаки передней кромки лопаток равен нулю (независимо от величины окружной скорости лопаточной решетки). Окружная и радиальная равномерность потока на выходе движителя, отсутствие концевых вихрей вследствие замкнутости периметра канала, а также отсутствие собственного сопротивления формы струи движителя и ее влияния на корпус судна обеспечивают высокий КПД движителя и его низкий акустический шум.
обеспечивает равномерность этого процесса, в потоке отсутствуют зоны понижения давления независимо от величины окружной скорости решетки. Это обуславливает бескавитационность рабочего процесса движителя на расчетном режиме работы, то есть, когда угол атаки передней кромки лопаток равен нулю (независимо от величины окружной скорости лопаточной решетки). Окружная и радиальная равномерность потока на выходе движителя, отсутствие концевых вихрей вследствие замкнутости периметра канала, а также отсутствие собственного сопротивления формы струи движителя и ее влияния на корпус судна обеспечивают высокий КПД движителя и его низкий акустический шум.
Вследствие узкого диапазона бескавитационной работы движителя, определяемого малым отклонением угла атаки входной кромки от нулевого положения, предложенный движитель может иметь кавитацию на входных кромках на нерасчетных и переходных режимах. Кроме того, на скоростных судах с малой глубиной погружения движителя возможно возникновение кавитации на обтекателе ступицы движителя. Указанные недостатки могут быть устранены известными техническими решениями: обеспечение широкого диапазона бескавитационной работы движителя при фиксированных оборотах ротора и изменении нагрузки на него может осуществляться управлением расходом среды, проходящей через движитель, и/или изменением закрутки потока на входе в ротор движителя с помощью известных устройств и систем регулирования. Снижение сопротивления центральной части и исключение кавитации на кормовом обтекателе ступицы ротора при высокой скорости движения судна и малом заглублении движителя обеспечивается подачей воздуха либо продуктов сгорания в полость за ступицей ротора.
Градиентное по нормали к потоку течение как в окружном, так и в радиальном направлениях в проточной части движителя по изобретению исключается за счет того, что процесс энергообмена среды и движителя организован не на профилированных гидродинамических поверхностях лопастей либо лопаток, а в объеме межлопаточных каналов, аксиально расположенных одна в другой и разделенных промежуточными обечайками оседиагональных лопаточных решеток. При этом повышение статического давления в потоке осуществляется не в результате торможения осевой скорости набегания потока, как, например, в диффузоре водометного движителя, а торможением относительной скорости потока в диффузорных межлопаточных каналах лопаточных решеток ротора. Последнее обеспечивается тем, что площадь поперечного сечения межлопаточных каналов лопаточных решеток увеличивается от входа к выходу. Соблюдение условия коллинеарности векторов абсолютного ускорения и относительной скорости потока в этом процессе достигается:
а) в окружном направлении - за счет того, что текущий угол установки лопаток, равный в пределах отдельной решетки на расчетном режиме работы движителя углу натекания потока на лопатки на входе в соответствующую решетку, сохраняется по своей величине по всей длине канала;
б) в радиальном направлении - за счет диагональности решеток, вследствие которой центростремительное ускорение закрученного в радиальной плоскости потока уравновешивается центростремительным ускорением противоположного знака, возникающим в потоке в результате разворота его осевой составляющей скорости на некоторый угол в радиальном направлении.
Поддержка высокой степени окружной равномерности потока на выходе за счет решеток на нерасчетных и переходных режимах работы движителя, а также малая осевая длина решеток, влияющая на величину площади смоченной поверхности движителя, обеспечивается тем, что количество лопаток решеток увеличивается от центра к периферии. Таким образом, приведенные технические решения профиля проточной части лопаточных решеток обеспечивают равномерность поля скоростей на выходе межлопаточных каналов отдельной взятой решетки как в окружном, так и в радиальном направлениях, а отсутствие в потоке зон понижения статического давления исключает явление кавитации на расчетном режиме работы (угол атаки входных кромок равен нулю) независимо от величины окружной скорости ротора движителя.
Снижение степени общей радиальной неравномерности потока, являющейся следствием понижения энергетики решеток от периферии к центру, достигается тем, что степень диагональности решеток увеличивается от периферии к центру, а также тем, что профилированное кольцо, промежуточные обечайки и поверхность втулки ротора имеют после лопаток по осевой длине продолжения, образующие в комплексе радиально-спрямляющий аппарат и оканчивающиеся цилиндрическими участками. Повышение степени диагональности решеток центральной части приводит к повышению энергетики центральных решеток тем больше, чем ближе решетка отстоит от центра. Радиально-спрямляющий аппарат снижает величину градиента давления на обечайках в радиальном направлении, создавая дополнительный упор движителю за счет реакции потока при развороте его вектора абсолютной скорости, имеющего радиальную составляющую, в осевое направление.
На фиг. 9 представлена схема движителя с регулированием режима работы при переменной нагрузке, например, грузового судна с изменяющимся водоизмещением.
Движитель состоит из вала 1 привода, ступицы 2 ротора, обтекателя 3 ступицы, неподвижного цилиндрического кольца 4 с профилированным входом, неподвижного либо с поворотными лопатками направляющего аппарата 14, ротора 15 движителя без радиально-спрямляющего аппарата, обечайки 16 неподвижного радиально-спрямляющего аппарата, промежуточной обечайки 5, отклоняющего щитка 17 регулирования площади сечения сопловой части движителя. Позицией 18 показан профиль лопасти направляющего аппарата в неповоротном варианте исполнения, узел 1 представляет вариант с регулированием угла закрутки входящего потока в диапазоне угла α за счет, например, поворотной части лопаток направляющего аппарата 14. Позицией 6 обозначена лопатка ротора, а позициями 19 и 20 показаны соответственно пилон сопловой части ротора и исполнительный элемент поворота щитков 17, перемещающихся в диапазоне Δf .
На фиг. 9 также показана в проекционной связи развертка проточной части движителя с изображениями треугольников скоростей в сечениях I и II, а также вектор приращения скорости потока ΔC2-3 в сопловой части движителя на участке II - III.
Поток со скоростью C0, равной скорости движения судна, входит в направляющий аппарат 14 движителя, где под воздействием неподвижных или подвижных лопаток направляющего аппарата поток приобретает окружную скорость CU1, направленную, например, в сторону, противоположную окружной скорости  ротора. В межлопаточных каналах решеток ротора 15 поток тормозится до нулевого значения, обуславливая отсутствие закрутки потока на выходе лопаточных решеток ротора 15. На участке II - III поток разворачивается в радиально-спрямляющем аппарате в осевое направление и в сопловой части движителя разгоняется со скорости C2 до скорости C3 без закрутки потока. Приращение осевой скорости ΔCx обуславливает упор движителя. В этом процессе к среде подводится удельная энергия, равная Hэ = CU1U1.
ротора. В межлопаточных каналах решеток ротора 15 поток тормозится до нулевого значения, обуславливая отсутствие закрутки потока на выходе лопаточных решеток ротора 15. На участке II - III поток разворачивается в радиально-спрямляющем аппарате в осевое направление и в сопловой части движителя разгоняется со скорости C2 до скорости C3 без закрутки потока. Приращение осевой скорости ΔCx обуславливает упор движителя. В этом процессе к среде подводится удельная энергия, равная Hэ = CU1U1.
при измерении нагрузки на движитель изменится в ту или иную сторону скорость движения судна, что при постоянных оборотах ротора приведет к изменению угла натекания потока β1 на лопатках ротора. В результате этого появится некоторый угол атаки входных кромок (положительный или отрицательный) и, как следствие, градиентное их обтекание потоком. При остаточно большой окружной скорости ротора возможно появление кавитации на передних кромках лопаток. Для исключения нерасчетного режима обтекания входных кромок путем перемещения щитков 17 в ту или иную сторону изменяется площадь сечения выхода движителя, что приводит к соответствующему изменению расхода потока через движитель и, следовательно, к изменению скорости входа его в движитель. При этом соответственно изменяется угол β1 натекания потока на лопатки.
Для расширения диапазона регулирования, как вариант, одновременно можно менять угол закрутки потока путем изменения угла установки α , например, задней части лопаток (фиг. 11). Характерной особенностью данной схемы является то, что дополнительные потери трения, связанные с установкой направляющего аппарата и пилонов сопловой части движителя, компенсируются исключением закрутки струи за счет предварительной закрутки потока в направляющем аппарате навстречу вращению ротора. Однако в этой схеме закрутка потока на входе связана с понижением статического давления, что в некоторых случаях нежелательно. Поэтому раскрутка потока в данном случае может осуществляться профилированными пилонами сопловой части движителя без входного направляющего аппарата.
На фиг. 12 представлен вариант схемы движителя скоростного глиссирующего судна с малой глубиной погружения движителя. Движитель 21 смонтирован в кормовой части 22 корпуса судна в силовом пилоне 23, выполненном с полостью для подвода атмосферного воздуха. Позициями 24 и 25 показаны соответственно вход и выход воздуха. Позициями 26 и 27 показаны параллельные границы потока среды, взаимодействующей с движителем на расчетном режиме движения соответственно на входе и выходе. Потоки среды и воздуха на фиг. 12 обозначены соответственно "Б" и "В", а буквами "Г" и "Д" обозначены сечения потоков среды и воздуха соответственно. C1 и C2 - скорость среды на входе и выходе движителя соответственно.
На расчетном режиме движения поток среды с параллельными границами (цилиндрическая струя) входит в движитель со скоростью C1, где к потоку подводится энергия в безградиентном течении. Поток со скоростью C2 (которая больше скорости C1) выходит из движителя с меньшим сечением. Это уменьшение сечения при сохранении внешней границы потока достигается за счет увеличения диаметра обтекателя ступицы. С целью исключения деформации выходящей струи, связанной с понижением статического давления в зоне обтекателя ступицы и, как следствие последнего, повышением потерь и появлением кавитации на обтекателе, в образующуюся за обтекателем полость в потоке среды через полый пилон подводится атмосферный воздух. Таким образом, понижение давления за ступицей не может быть больше величины статического давления на глубине расположения ступицы движителя, что значительно меньше возможного понижения давления при обтекании обычного обтекателя ступицы движителя. Цилиндрическая граница взаимодействующего с движителем потока исключает воздействие последнего на корпус судна. Подвод воздуха в полость за ступицей может осуществляться, например, через полое перо руля, выполненное с соответствующими отверстиями в зоне полости струи.
Формирование цилиндрической формы потока среды струи, взаимодействующего с движителем, на расчетном режиме работы движителя достигается тем, что образованные концевыми цилиндрическими участками поверхностей радиально-спрямляющего аппарата кольцевые щели имеют площади поперечного сечения, равные в сумме величине, при которой объемный расход потока, протекающего через движитель на расчетном режиме работы, равен произведению площади сечения входа в движитель на скорость судна. В этом случае статическое давление в струе как на входе в движитель, так и на выходе из движителя равно статическому давлению во внешнем по отношению струи потоке. Это исключает воздействие на корпус судна и обеспечивает цилиндрическую форму самой струи. Последнее исключает деформацию внешнего потока струей движителя и, следовательно, исключает сопротивление формы собственно струи движителя.
Повышение технологичности изготовления движителя и его ремонтопригодности достигается за счет того, что межлопаточные каналы образованы поверхностями обечаек и лопаток, которые в пределах отдельной решетки имеют постоянную толщину и заостренные входные и выходные кромки. Это позволяет изготавливать движитель из листового материала в виде отдельных деталей, соединяемых, например, сваркой. Такая технология изготовления движителя не требует сложного и уникального оборудования, что позволяет осуществить реализацию движителя в условиях любого машиностроительного завода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРГАНИЗАЦИИ ЭНЕРГООБМЕНА РАБОЧЕЙ СРЕДЫ И РАБОЧЕГО КОЛЕСА ЛОПАТОЧНОЙ МАШИНЫ | 1995 |
|
RU2100657C1 |
| ТЕПЛОВОЙ КАВИТАЦИОННЫЙ ГЕНЕРАТОР | 2010 |
|
RU2422733C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ТЯГИ БЕЗЛОПАСТНЫМ РОТОРОМ | 2020 |
|
RU2767858C2 |
| УНИВЕРСАЛЬНЫЙ СУДОВОЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ЗАЩИЩЕННОСТИ | 2013 |
|
RU2523862C1 |
| ВИНТОРУЛЕВАЯ КОЛОНКА С ЭЛЕКТРОДВИЖИТЕЛЕМ | 2024 |
|
RU2834489C1 |
| ВЕНТИЛЯТОРНАЯ СТУПЕНЬ КОМПРЕССОРА (ВАРИАНТЫ) | 2005 |
|
RU2294461C1 |
| СУДОВАЯ ТУННЕЛЬНАЯ ВИНТОВАЯ ВОДОМЕТНАЯ ДВИЖИТЕЛЬНАЯ СИСТЕМА | 2014 |
|
RU2666983C2 |
| КАМЕРА СГОРАНИЯ ТЕПЛОВОГО ДВИГАТЕЛЯ | 2002 |
|
RU2212589C1 |
| ВОДОМЕТНОЕ УСТРОЙСТВО | 2011 |
|
RU2492104C2 |
| СТУПЕНЬ ЦЕНТРОБЕЖНОГО КОМПРЕССОРА | 2007 |
|
RU2334901C1 |

Использование: транспортное машиностроение, в частности судовые движители. Сущность изобретения: в судовом движителе, содержащем ротор, ступицу с обтекателем и закрепленные на ней гидродинамические поверхности с расположенным по периферии последних кольцом, гидродинамические поверхности выполнены в виде аксиально расположенных одна в другой и разделенных промежуточными обечайками оседиагональных лопаточных решеток, степень диагональности которых увеличивается от периферии к центру, а количество лопаток выполнено увеличивающимся от центра к периферии. Образованные поверхностями кольца, обечаек, втулки и лопаток межлопаточные каналы имеют площадь поперечного сечения, увеличивающуюся от входа к выходу, а текущий угол установки лопаток в пределах отдельной решетки выполнен постоянным по всей длине канала. Использование изобретения повышает КПД движителя и исключает появление кавитации. 3 з.п. ф-лы, 13 ил.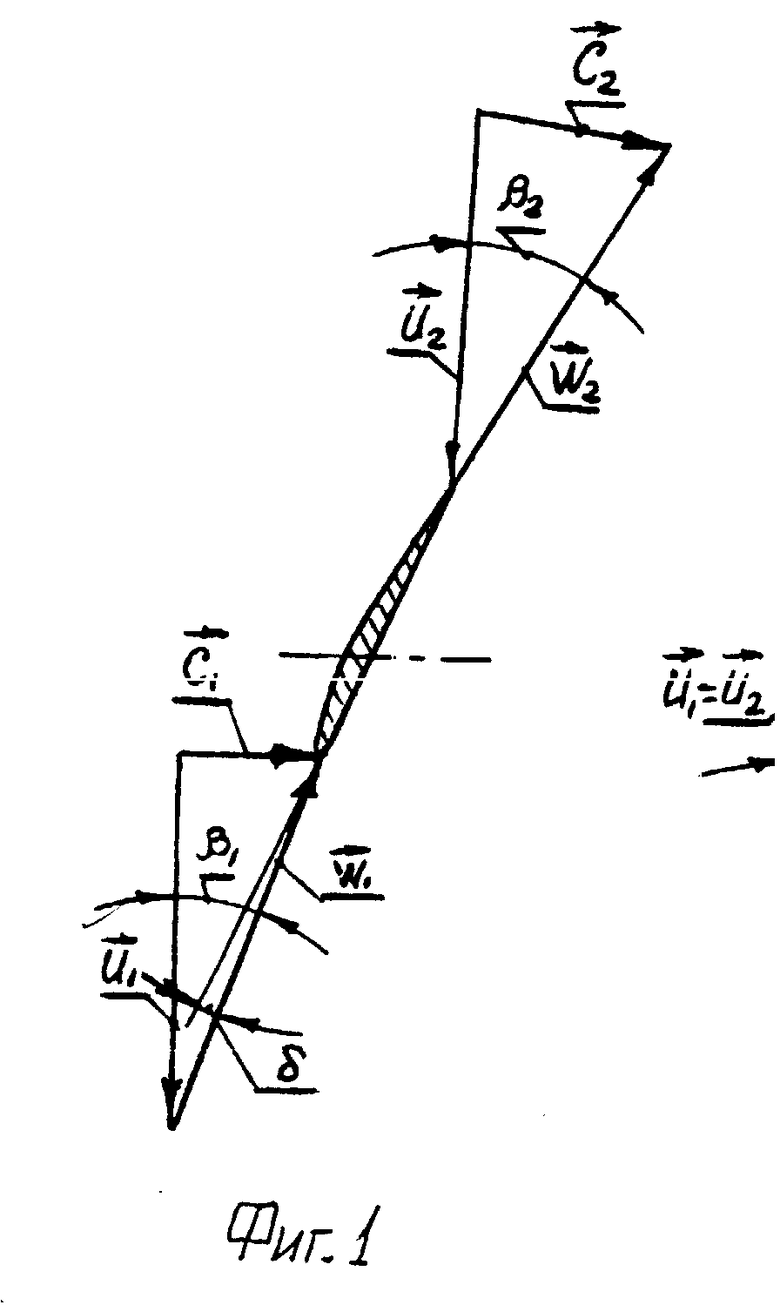
| SC, авторское свидетельство N 1283155, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |

