Изобретение относится к средствам гашения вибраций различных технических объектов.
Наиболее близким по технической сущности и достигаемым результатам к предложенному изобретению является виброгаситель, содержащий заполненный демпфирующей жидкостью корпус, размещенную в нем подвижную массу и упругий элемент, связывающий подвижную массу с корпусом [1].
Недостаток виброгасителя заключается в низкой эффективности виброгашения в широком частотном диапазоне вследствие возможности его предварительной настройки лишь на одну рабочую частоту, поэтому виброгашение в области других частот, особенно при случайных возмущениях, не обеспечивается, так как невозможна его поднастройка.
Изобретение направлено на повышение эффективности виброгашения за счет расширения диапазона рабочих частот виброгашения.
Это достигается тем, что в предлагаемом магнитореологическом виброгасителе (МРВГ) используются катушки управления, расположенные на корпусе, который одновременно является магнитопроводом и магнитореологической суспензией (МРС), которая помещается в зазоре между подвижной массой МРВГ и катушками управления. Подача сигнала управления приводит к возникновению магнитного поля вокруг магнитопровода, что вызывает изменение вязкожесткостных свойств МРС. В магнитном поле частицы МРС образуют вдоль силовых магнитных линий прочные цепи и МРС как бы "затвердевает". Степень "затвердевания" МРС зависит от величины сигнала, подаваемого на катушки управления, что позволяет значительно расширить диапазон рабочих частот виброгасителя. При колебаниях подвижной массы МРВГ, выполненной из магнитомягкого материала, магнитный поток катушек управления, взаимодействуя с подвижной массой, изменяет диссипативно-жесткостные свойства МРС, что и приводит к изменению частотных характеристик самого МРВГ. Для предотвращения ударов и залипания подвижная масса МРВГ покрыта слоем резины.
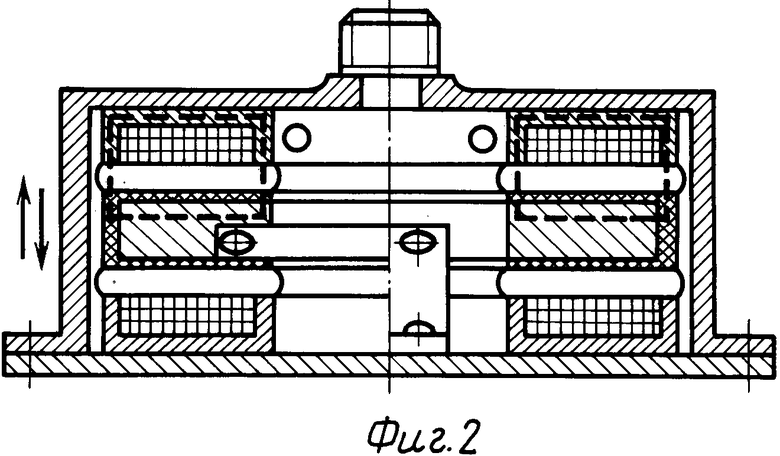
На фиг. 1 представлен разрез вдоль продольной оси МРВГ; на фиг. 2 - принцип работы катушек управления.
На фиг. 1 и 2 обозначено; 1 - корпус из магнитомягкого материала, являющийся одновременно магнитопроводом; 2 - катушки управления; 3 - магнитореологическая суспензия (МРС); 4 - подвижная масса; 5 - пружина; 6 - покрытие из резины; 7 - полюсные наконечники.
МРВГ состоит из герметичного корпуса 1, в котором на пружине 5 подвешена кольцеобразная подвижная масса 4 из магнитомягкого материала, покрытая тонким слоем резины 6. Сверху и снизу от подвижной массы размещены катушки управления 2 с полюсными наконечниками 7.
Катушки управления размещены в полюсных наконечниках 7, такое размещение позволяет сформировать магнитный поток Ф (фиг. 2) таким образом, что в кольцевом зазоре между полюсными наконечниками 7 и подвижной массой 4 магнитная индукция имеет достаточно высокое значение, порядка 0,5 Тл, где и концентрируется МРС. Наконечники выполнены из магнитомягкого материала (например, Армко-железо), так как при высоких частотах работы виброгасителя порядка 30-2000 Гц недопустимо остаточное намагничивание полюсных наконечников. Корпус 1 виброгасителя также выполнен из магнитного материала с целью шунтирования потоков рассеивания и защиты виброгасителя от внешних магнитных потоков.
Для осуществления управления частотными характеристиками МРВГ применяется МРС из карбонильного железа с размерами частиц от 10 до 100 мкм. При колебаниях подвижной массы МРВГ в области резонансных частот зазор между подвижной массой 4 и корпусом каждой из катушек управления может быть равен толщине резинового покрытия. При этом магнитная индукция в зазоре будет максимальной, что приведет к возрастанию МРС до максимального значения при одновременном изменении ее диссипативно-жесткостных характеристик. Это, в свою очередь, вызовет изменение частотных характеристик МВРГ.
Пояснение основных свойств МРВГ лучше всего провести на математической модели МРС, где четко показывается, какие характеристики МРС оказывают влияние на диссипативно-жесткостные свойства МРВГ. В виду того, что свойства МРС, используемой в качестве рабочей жидкости МРВГ, являются физически нелинейными, поэтому существует множество математических моделей МРС, отражающих ту или иную характеристику. Перечислим основные математические модели: модель Шведова-Бингама, модель Кроули-Китца, модель Кессона, обобщенная модель Шульмана, модель Кутателадзе-Хабаспашевой. Применение той или иной реологической модели для отражения свойств МРС заключается в замене истинной реологической зависимости ,
,
где
τ - напряжение сдвига, МПа;
γ - скорость течения МРС,
некоторым управлением, которое достаточно точно представляет кривую течения МРС в выбранном диапазоне скоростей течения.
МРС с точки зрения колебательного процесса, характеризующего ее диссипативно-жесткостные свойства, обладает как вязким, так и гистерезисным трением, поэтому реологическая модель течения МРС с точки зрения колебательного процесса должна интерпретироваться как зависимость силы сопротивления от скорости движения виброизолируемого объекта.
 ,
,
где
Pсм - сила сопротивления, обусловленная диссипативными свойствами МРС; - скорость движения виброизолируемого объекта, м/с.
- скорость движения виброизолируемого объекта, м/с.
Перемещение МРВГ при виброзащите объекта происходят при относительном движении виброизолируемого объекта от основания. Переносчиком колебательного движения является МРС, поэтому динамические свойства МРС и определяют динамику поведения МРВГ.
Управление движения МРВГ записывается следующим образом:
где
m - масса виброизолируемого объекта, кг;
c - жесткость виброизолируемого объекта, H/M;
P(t) сила возмущения, H.
При движении подвижной массы в канале корпуса МРС в своем движении ограничена внутренним R1 и внешним R2 радиусами. Запишем коэффициент потерь, характеризующий вязкие свойства МРС
где
R1,2 - внутренний и внешний радиусы канала движения МРС, м;
m - масса виброизолируемого объекта, кг;
ρ - плотность МРС, кг/с;
λ - длина волны при работе на некоторой фиксированной частоте, м; - частота внешнего возмущения, c-1.
- частота внешнего возмущения, c-1.
Для каждой частоты коэффициент потерь имеет свое значение. Так, как этот коэффициент пропорционален частоте  , то вязкое демпфирование МРС более эффективно на высоких частотах, чем на низких.
, то вязкое демпфирование МРС более эффективно на высоких частотах, чем на низких.
В гистерезисном демпфировании МРС можно выделить линейную составляющую (эллиптический гистерезис) и нелинейную (неэллиптический гистерезис). В случае эллиптического гистерезиса зависимость между напряжением и деформацией представляется в виде
где
α,β - эмпирические коэффициенты;
σ - нормальное напряжение МРС, МПа;
E - модуль упругости МРС, МПа;
ε - относительная деформация МРС.
Решением уравнения (5) являются следующая зависимость:
σ = (E1+jE2)ε, (6)
где
j - мнимая единица,
а также
Соотношения (6)-(8) отражают ту особенность МРС, что в случае нелинейного гистерезиса зависимость между напряжением и деформацией имеет характер комплексный. В случае неэллиптического гистерезиса зависимость модуля упругости от частоты представляется более сложной зависимостью
где
a, b, c, d - коэффициенты, определяемые из полиномиальных зависимостей
Таким образом, виброизолированный объект с использованием МРВГ данного типа на базе МРС представляет собой сложную физически нелинейную систему. Однако управляемые диссипативно-жесткостные свойства гасителя позволяют осуществлять эффективное виброгашение в широком диапазоне рабочих частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАСИТЕЛЬ КОЛЕБАНИЙ | 1999 |
|
RU2188349C2 |
| ПОРШНЕВОЙ МАГНИТОЖИДКОСТНЫЙ АМОРТИЗАТОР | 2012 |
|
RU2506476C1 |
| ВИБРООПОРА (ВАРИАНТЫ) | 2022 |
|
RU2787901C1 |
| СТЕНД ДЛЯ ВИБРОДИАГНОСТИКИ ИЗДЕЛИЙ | 1994 |
|
RU2111467C1 |
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| ТЕРМОУПРАВЛЯЕМОЕ МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ | 2000 |
|
RU2186275C2 |
| ИНЕРЦИОННЫЙ МАГНИТОЖИДКОСТНЫЙ ДЕМПФЕР (ВАРИАНТЫ) | 2013 |
|
RU2549592C1 |
| МАГНИТОЖИДКОСТНОЕ УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ | 1990 |
|
RU2145394C1 |
| Регулируемый магнитореологический пневматический амортизатор | 2021 |
|
RU2764210C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
Использование: для гашения вибраций различных приборов и устройств. Сущность изобретения: магнитореологический виброгаситель содержит корпус, заполненный демпфирующей средой с размещенными в нем электромагнитной системой и подвижной массой, закрепленной на гибкой связи с корпусом. Использование в качестве демпфирующей среды магнитореологической суспензии позволяет регулировать частотные характеристики самого магнитореологического виброгасителя, изменяя напряжение на катушках электромагнитной системы. 2 з.п. ф-лы, 2 ил.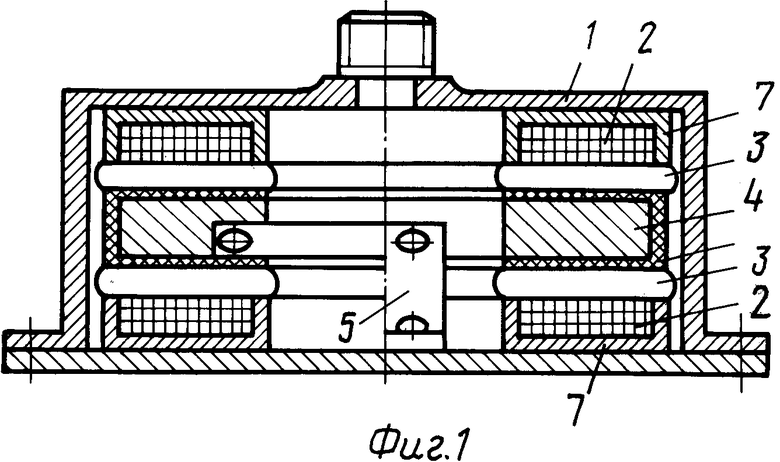
| SU, авторское свидетельство, 970006, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
