Изобретение относится к электротехнике, в частности к способам управления многодвигательными электроприводами с индивидуальными силовыми преобразователями и упругими механическими передачами от электродвигателей к общей массе, применяемыми в опорно-поворотных устройствах, а также в рабочих машинах прессовой группы бумагоделательного, химического, текстильного и другого оборудования.
Основными требованиями, предъявляемыми к указанным многодвигательным электроприводам, наряду с точностью и быстродействием в управлении движением общей массы, равномерным распределением нагрузок электродвигателей и механических передач в условиях вариаций параметров системы являются высокая надежность, простота и низкая стоимость, в значительной мере определяемые использованием минимального количества измерительных устройств.
Известен способ управления многодвигательным электроприводом [1, рис. 1.2, б (с. 15)] , основанный на раздельном формировании управляющих воздействий на каждый электродвигатель в зависимости от значений его тока и скорости по принципу подчиненного регулирования и формировании дополнительных управляющих воздействий на каждый ведомый электродвигатель в зависимости от величины его тока. При этом обеспечивается равномерная загрузка двигателей и механических передач.
Способ требует использования только измерителей тока и скорости. Однако из-за наличия упругих механических передач и взаимных связей электроприводов при его применении не может быть достигнуто высокое качество управления движением общей массы, сохраняется высокая чувствительность системы к вариациям внутренних параметров.
Известен также способ управления электроприводами [2] путем формирования основного управляющего воздействия на электроприводы в зависимости от полного вектора состояния ведущего канала, включающего электропривод и n-ную часть общей массы, где n - количество электродвигателей, и формирования дополнительных управляющих воздействий на ведомые электроприводы в зависимости от результатов сравнения одноименных координат ведущего и соответствующего ведомого электропривода, причем темп формирования дополнительных управляющих воздействий устанавливается выше темпа основного управляющего воздействия.
Под вектором состояния понимают [3, стр. 158-162] набор физических величин (координат или переменных состояния), однозначно определяющих состояние объекта в каждый момент времени. В случае электропривода с упругой передачей от вала двигателя к общей массе координатами состояния будут: напряжение силового преобразователя, ток якорной цепи (или пропорциональный ему электромагнитный момент), скорость двигателя, разность углов поворота вала двигателя и общей массы (или упругий момент) и скорость общей массы. Их набор и будет составлять вектор состояния.
Применение принципа разделения темпов движений при отработке основного и дополнительных управляющих воздействий и реализация управления по координатам состояния системы позволяют получить малоколебательные быстропротекающие процессы и равномерно распределить нагрузку на электродвигатели при условии соответствия параметров каналов тем значениям, которые приняты при настройке системы или их незначительном отклонении.
Однако при изменении значений параметров системы в большом диапазоне, в особенности в ведущем электроприводе, качественные показатели системы резко ухудшаются. Недостатком данного способа является и необходимость использования измерительных устройств по всем координатам состояния, что увеличивает сложность и снижает надежность системы.
Наиболее близким техническим решением является способ [4] управления многодвигательным электроприводом путем формирования основного управляющего воздействия на электроприводы в зависимости от полного вектора состояния эталонной модели локального канала, включающего электропривод и n-ную часть общей массы, где n - количество электродвигателей, и формирования дополнительных управляющих воздействий на электроприводы на основе полного вектора состояния, определяемого разностью значений одноименных координат модели и соответствующего локального канала, в предположении, что локальные каналы независимы, причем темп формирования дополнительных управляющих воздействий устанавливается выше темпа основного управляющего воздействия.
В этом случае скорость общей массы можно считать одинаковой для всех локальных каналов.
Данный способ позволяет получить высокое качество в управлении движением общей массы, равномерно распределить нагрузку на электродвигатели и механические передачи при значительных отклонениях значений параметров системы от принятых при настройке.
Однако реализация управления многодвигательным электроприводом по указанному способу требует использования большого количества измерительных устройств (по всем координатам состояния) и применения детализированной эталонной модели локального канала, определяющей законы изменения как выходной, так и всех промежуточных координат состояния, а также отражающей их взаимосвязи, то есть повторяющей своей структурой структуру канала.
Это приводит к существенному повышению сложности и стоимости системы управления, снижает надежность ее работы.
Техническим результатом является упрощение, удешевление и повышение надежности системы управления многодвигательным электроприводом при сохранении высокой точности, быстродействия и равномерной загрузки каналов в условиях вариаций внутренних параметров.
Технический результат обеспечивается тем, что основное управляющее воздействие формируют, суммируя величины, пропорциональные первой и старшим производным по времени выходной координаты эталонной модели, а дополнительные управляющие воздействия формируют путем сложения величин, пропорциональных первой и старшим производным по времени от результатов сравнения выходной и промежуточной координат состояния эталонной модели, с одноименными координатами соответствующего локального канала.
С целью упрощения детализированная эталонная модель локального канала может быть заменена упрощенной эталонной моделью такого же порядка, определяющей законы изменения и взаимосвязь лишь выходной координаты и одной из промежуточных координат состояния канала.
Дополнительное упрощение аппаратной или программной реализации может быть достигнуто на основе редуцирования (снижения размерности) эталонной модели с сохранением законов изменения и взаимосвязи выходной и одной из промежуточных координат состояния. Например, силовой преобразователь может быть представлен безынерционным (усилительным) звеном вместо апериодического и т. п.
Применение упрощенной эталонной модели (редуцированной эталонной модели) локального канала, а также формирование основного и дополнительных управляющих воздействий на электроприводы не по полным векторам состояния эталонной модели и локальных каналов, а лишь по выходным и промежуточным координатам и их производным по времени позволяет использовать гораздо меньшее количество измерительных устройств и тем самым существенно упростить и удешевить реализацию системы, повысить надежность ее работы при сохранении высоких показателей качества управления многодвигательным электроприводом.
Количество старших производных при формировании основного и дополнительных управляющих воздействий определяется соответственно порядком эталонной модели (редуцированной эталонной модели) и размерностью локального канала (степенью описывающего ее дифференциального уравнения), а также требованиями, предъявляемыми к качеству управления (например, требованием астатизма и т.п.).
Применение упрощенной эталонной модели (редуцированной эталонной модели) для упрощения всей системы управления, а также формирование управляющих воздействий по выходной координате объекта и набору ее производных по времени [5] взамен управляющих воздействий по полному вектору состояния с целью снижения количества измерительных устройств являются известными техническими решениями в теории автоматического управления.
Однако в условиях многодвигательного электропривода, когда выходные координаты всех локальных каналов оказываются одинаковыми и равными скорости общей массы, традиционное применение известных принципов управления не позволяет обеспечить синхронизацию локальных каналов и их равномерную загрузку. Это приводит к существенному ухудшению всех показателей качества системы управления.
Поэтому в данном случае локальные каналы предлагается синхронизировать с упрощенной эталонной моделью локального канала (редуцированной эталонной моделью) не только по выходной, но и по одной из промежуточных координат состояния (току. скорости электродвигателя, упругому моменту механической передачи и др.) с использованием набора их производных по времени.
Это позволяет использовать лишь по одному измерительному устройству в каждом локальном канале электропривода при сохранении желаемого качества работы системы управления.
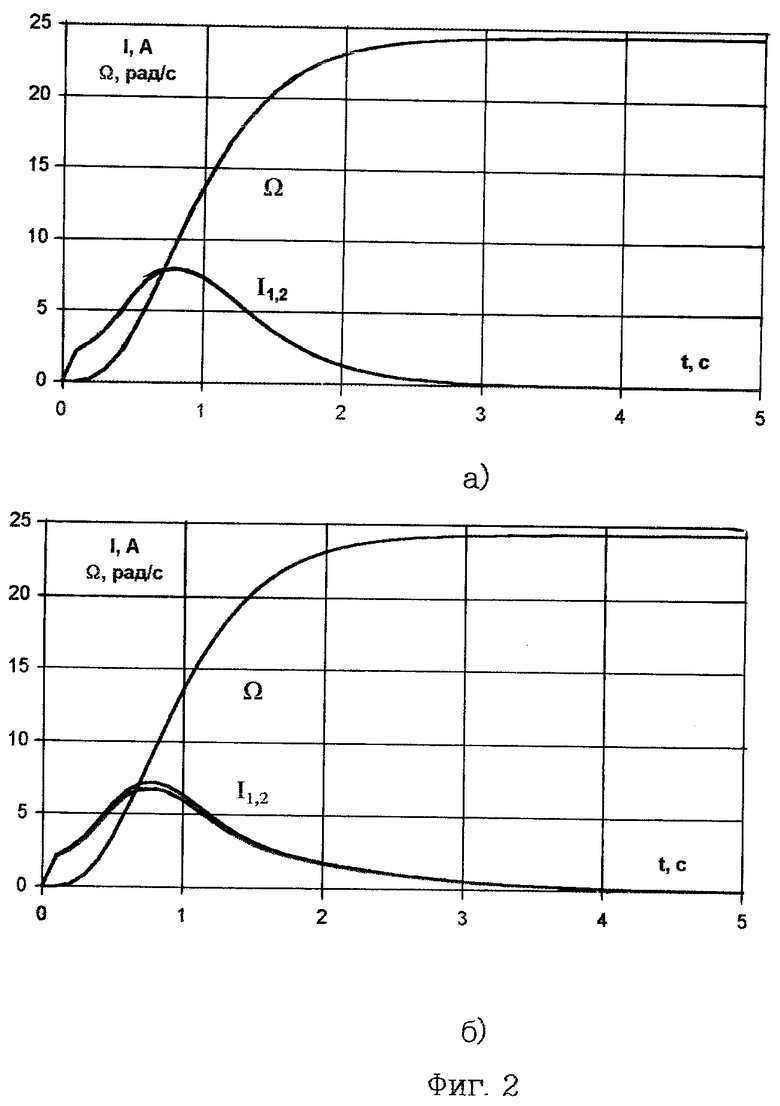
На фиг. 1 представлена функциональная схема многодвигательного электропривода, реализующая предложенный способ, а на фиг.2 - диаграммы изменения основных координат состояния прототипа (а) и предлагаемого решения (б) при изменении жесткости упругой передачи в три раза.
Многодвигательный электропривод имеет общую массу 1 и локальные каналы 2, 3, состоящие из электродвигателя и механической передачи от его вала к общей массе. Задатчик скорости 4 подключен к входу основного регулятора скорости 5. Выход регулятора 5 подключен к входам эталонной модели (редуцированной эталонной модели) 6 и локальных каналов 2, 3. Первый выход эталонной модели (редуцированной эталонной модели) подключен к входу основного регулятора 5 и первому входу элемента сравнения 7, на второй вход которого поступает сигнал скорости с выхода общей массы 1. Выход элемента сравнения 7 подключен к входу дополнительного регулятора скорости 8, выход которого соединен с входами локальных каналов 2 и 3. Сигнал со второго выхода модели сравнивается с соответствующими сигналами локальных каналов на элементах сравнения 9 и 10, выходы которых подключены к входам локальных регуляторов 11 и 12. Выходы последних подключены к входам локальных каналов 1 и 2.
Основной, дополнительный и локальные регуляторы могут быть выполнены в виде дифференцирующих звеньев на операционных усилителях или на основе микропроцессорного контроллера с заменой производных конечными разностями. Такие регуляторы называется полиномиальными, так как представляют собой динамические звенья с передаточными функциями, числители и знаменатели которых являются полиномами от оператора Лапласа. Их коэффициенты выбираются таким образом, чтобы обеспечить замкнутой системе заданные динамические показатели. Синтез таких регуляторов ведется методами полиномиальной алгебры на основе решения диофантовых уравнений [5].
Эталонная модель 6 представляет собой динамическое звено с передаточной функцией, обеспечивающей необходимые динамические характеристики наиболее простым образом. Например, на фиг.1 эталонная модель представлена в виде вход-выходных соотношений для реализации на аналоговых элементах в непрерывном времени (s - оператор Лапласа). Звено с передаточной функцией H1(s)= B(s)/A(s) позволяет получить выходной сигнал, соответствующий одной из промежуточных переменных состояния, а соединенное с ним последовательно звено H2(s)= K/B(s) - сигнал, эквивалентный скорости общей массы. Эталонная модель может быть выполнена и в любой из канонических форм представления динамических объектов в пространстве состояний (в форме управляемости или наблюдаемости). Для цифровой реализации модель должна быть представлена в дискретной форме от оператора z=еTs, где Т - такт квантования по времени.
Устройство работает следующим образом.
Основной регулятор 5 на основе сигналов от задатчика 4 и выходного сигнала модели 6 и его производных формирует основное управляющее воздействие на электроприводы локальных каналов 2 и 3, задавая эталонную траекторию движения, не зависящую от изменений параметров объекта управления.
При появлении отклонений траекторий выходных координат модели 6 и общей массы 1 или промежуточных координат модели 6 и локальных каналов 2 и 3 дополнительный регулятор 8 или локальные регуляторы 11 и 12 соответственно формируют дополнительные управляющие воздействия на локальные каналы, устраняющие данные отклонения. Компенсация отклонений выполняется на основе сравнения значений как самих сигналов, так и их производных по времени с более высоким темпом, чем темп основного движения и поэтому заканчивается прежде, чем происходит сколь-либо существенное искажение траектории движения общей массы.
В результате система сохраняет высокое качество переходных процессов и равномерную загрузку локальных электроприводов, как и в случае прототипа, но достигается это значительным упрощением и повышением надежности системы управления.
Источники информации
1. Шестаков В.М. Системы электропривода бумагоделательного производства. - М.: Лесная промышленность, 1989, 240 с.
2. Патент 1767692 Способ управления многодвигательным электроприводом. Тарарыкин С.В., Тютиков В.В.
3. Попов Е. П. Теория линейных систем автоматического регулирования и управления: Учеб. Пособие для втузов. - 2-е изд., перераб. и доп. - М.: Наука. Гл. Ред. Физ. - мат. лит., 1989. - 304 с.
4. Патент 2007836 Способ управления многодвигательным электроприводом. Тарарыкин С.В., Тютиков В.В.
5. Волгин Л. Н. Оптимальное дискретное управление динамическими системами. - М.: Наука. Гл. ред. физ. - мат. лит., 1986. - 240 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1992 |
|
RU2007836C1 |
| Способ управления многодвигательным электроприводом | 1990 |
|
SU1767692A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЗАИМОСВЯЗАННЫМИ ЭЛЕКТРОПРИВОДАМИ (ВАРИАНТЫ) | 2006 |
|
RU2316886C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ КАЧЕСТВА (ВАРИАНТЫ) | 2003 |
|
RU2261466C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2138903C1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| ЭЛЕКТРОПРИВОД | 1996 |
|
RU2127940C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
Изобретение относится к электротехнике и может быть использовано в опорно-поворотных устройствах, а также в рабочих машинах прессовой группы бумагоделательного, химического, текстильного и другого оборудования. В способе управления многодвигательным электроприводом основное управляющее воздействие формируют, суммируя величины, пропорциональные первой и старшим производным по времени выходной координаты эталонной модели, определяющей законы изменения и взаимосвязь лишь выходной координаты и одной из промежуточных координат состояния локального канала, включающего n-ную часть общей массы, где n - количество электродвигателей. Дополнительные управляющие воздействия формируют путем сложения величин, пропорциональных первой и старшим производным по времени от результатов сравнения выходной и промежуточной координат состояния эталонной модели, с одноименными координатами состояния соответствующего локального канала в предположении, что локальные каналы независимы, причем темп формирования дополнительных управляющих воздействий устанавливается выше темпа основного управляющего воздействия. Техническим результатом является упрощение, удешевление и повышение надежности системы управления многодвигательным электроприводом при сохранении высокой точности, быстродействия и равномерной загрузки каналов в условиях вариаций внутренних параметров. 1 з.п.ф-лы, 2 ил.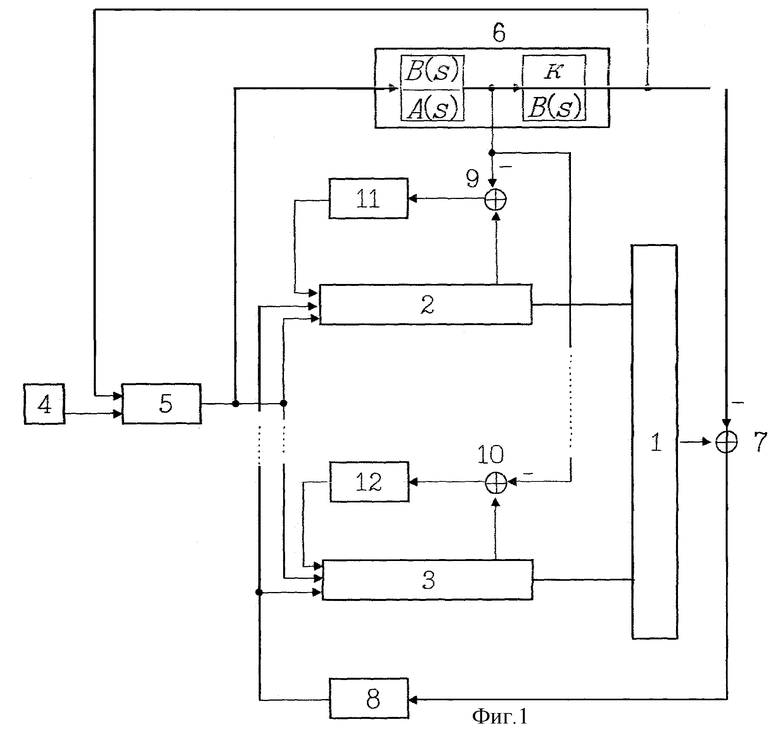
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1992 |
|
RU2007836C1 |
| Способ управления многодвигательным электроприводом | 1990 |
|
SU1767692A1 |

