Изобретение относится к измерительной технике и может быть использовано в отраслях народного хозяйства для коммерческого учета расхода и объема нефтепродуктов и других жидкостей.
Известна аппаратура для измерения скорости потока движущейся среды, включающая измерительный участок с двумя приемно-передающими пьезопреобразователями, два контура автоматического регулирования с формирователем зондирующих импульсов, коммутатором, селектором, усилителем-формирователем, управляемым генератором и управляемой линией задержки в каждом, а также выделитель разностной частоты, масштабирующий блок и дисплей (см. патент США N 4389899, кл. G 01 F 1/66, 1983). В устройстве автоматически компенсируются задержки в формирователях зондирующих импульсов.
Известное устройство не позволяет учесть влияние твердотельных задержек в протекторах пьезопреобразователей, а также учесть влияние задержек, возникающих при регистрации приемного сигнала. Работа двух управляемых генераторов в едином конструктивном исполнении вызывает их неизбежную взаимную подсинхронизацию на близких частотах и связанную с ней аддитивную погрешность измерения на малых расходах.
Известен также ультразвуковой измеритель скорости потока, содержащий измерительный участок с двумя приемно-передающими пьезопреобразователями, плоским и скошенным отражателями, формирователь зондирующих импульсов, три коммутатора, два селектора приемных сигналов, два усилителя-формирователя, дискриминатор времени, ждущий преобразователь напряжение - время с обратной зависимостью, задающий генератор, источник опорного напряжения, сумматор, два интегратора и блок вычислений (см. авторское свидетельство СССР N 1296942, кл. G 01 F 1/66, 1987).
Известное устройство автоматически компенсирует твердотельные задержки в протекторах пьезопреобразователей и устраняет взаимную подсинхронизацию двух контуров автоматического регулирования за счет применения единого элемента для нахождения обратных величин.
Известное устройство также не позволяет произвести учет и компенсацию задержек, возникающих при регистрации приемных сигналов из-за изменений амплитуды и деформации формы. Эти задержки зависят от скорости контролируемой среды, ее физико-химического состава, температурного дрейфа и стабильности во времени пьезопреобразователей.
Наиболее близким к заявляемому изобретению по своей физической сущности являются теплосчетчики UTC-1 и UTC-1a по ТУ 4218-001-11459018, 1993, АО "Пирамида", г. Смоленск и АО "Теплоприбор", г. Рязань.
Известное устройство содержит измерительный участок трубы, первый и второй приемно-передающие пьезопреобразователи и закрепленные на одной образующей на расстоянии S друг от друга два скошенных отражателя, диаметрально противоположных пьезопреобразователям соответственно, третий передающий пьезопреобразователь и плоский отражатель, закрепленные в двух плоскостях поперечного сечения измерительного участка, делящих расстояние S на три равных отрезка, и на образующих, которые проходят через две вершины равностороннего вписанного в поперечное сечение треугольника с третьей вершиной, принадлежащей образующей скошенных отражателей, и четвертый приемный пьезопреобразователь, закрепленный диаметрально противоположно третьему пьезопреобразователю, причем угол скоса и пространственная ориентация отражателей обеспечивают распространение УЗК от первого пьезопреобразователя ко второму и в обратном направлении по траектории, проходящей через отражатели и третий пьезопреобразователь, а также формирователь зондирующих импульсов, коммутатор, селекторы, усилители-формирователи, дискриминатор времени, ждущий преобразователь напряжение - время с обратной зависимостью, источник опорного напряжения, сумматор, цифроаналоговый преобразователь, программируемые таймер и параллельный интерфейс, микропроцессорную систему с дисплеем и клавиатурой и их связи.
В измерительном участке формируется опорная акустическая база длиной L1, которая перпендикулярна потоку, и информационная база длиной L2, имеющая угол с осью потока.
При одновременном попарном возбуждении третьего и первого пьезопреобразователей в тактах по потоку, а также третьего и второго пьезопреобразователей в тактах против потока в опорной акустической базе возникают многократные отражения (рециркуляции), и известное устройство определяет разность между обратными значениями времени между приемом опорных сигналов четвертых рециркуляций на четвертом пьезопреобразователе и соответствующими информационными сигналами. Полученная разность является мерой скорости потока.
Время распространения УЗК как в информационной, так и в опорной траекториях увеличены на две твердотельные задержки в протекторах пьезопреобразователей. При одинаковых протекторах всех пьезопреобразователей в известном устройстве как и в аналоге осуществляется автоматической компенсация твердотельных задержек.
При компенсации твердотельных задержек при изменениях амплитуд опорных и информационных сигналов применен способ детектирования по нуль-переходам (см. книгу Киясбейли А.Ш. и др. Частотно-временные ультразвуковые расходомеры и счетчики. - М. : Машиностроение, 1984, с. 88, также патент США N 4483202, кл. G 01 F 1/66, 1984 и др.).
Однако известное устройство не позволяет производить автоматическую компенсацию задержек при воздействии факторов, искажающих форму приемных сигналов. К их числу относятся температурные коэффициенты емкости и резонансной частоты пьезоматериалов и дрейф их во времени. Наибольшее влияние оказывают индивидуальные различия этих характеристик пьезопреобразователей. Даже в чистых средах нарушение симметрии картины распространения УЗК по направлению потока и против вызывают импульсные дифракционные явления (см., например, статью Гитис М.Б., Серегин Е.И. О дифракционных поправках при ультразвуковых измерениях в импульсном режиме. - Дефектоскопия, 1978, N 3, с. 90-93). Прямая погрешность от этой несимметрии может превышать единицы процентов (см. , например, статью Антонов Н. Н., Колмаков И. А. О времени распространения звукового сигнала в ультразвуковом расходомере. - Измерительная техника, 1978, N 7, с. 55-56) и она непосредственно привносится в погрешность измерения известного устройства.
В диспергирующих средах, например с повышенной концентрацией пузырьков газа или механических примесей, из-за обеднения спектра в высокочастотной области форма приемного сигнала "расползается", образуя "синусоиду", вдоль которой изменяются амплитуды, фазы и частота заполнения (см., например, книгу Ультразвук: Маленькая энциклопедия/ Гл. ред. И.П.Голямина. - М.: Сов. энциклопедия, 1979, с. 98). Деформация формы приемных сигналов при воздействии описанных факторов сводится в общем случае к изменениям их огибающих, фаз и частот заполнения, теоретический расчет которых очень сложен, и на практике они непредсказуемы. Кроме того, деформация формы индивидуальна для каждого передающего пьезопреобразователя, поэтому определение поправок и их учет в сигнальных задержках в рамках способа, на котором реализовано известное устройство, неосуществимы.
Технический результат, создаваемый изобретением, - повышение точности измерения за счет автоматической компенсации ошибок при определении временных интервалов.
Указанный результат достигается тем, что в предлагаемый ультразвуковой расходомер введены управляемая линия задержки, первый и второй распределители импульсов, дешифратор, второй цифроаналоговый преобразователь, второй и третий формирователи зондирующих импульсов, а длина траектории распространения ультразвуковых колебаний от первого пьезопреобразователя ко второму и в обратном направлении через поверхности отражателей и третьего пьезопреобразователя, выполненного приемно-передающим, составляет 5,5 внутренних диаметров трубы, при этом выходы всех формирователей зондирующих импульсов подключены соответственно к первому, второму и третьему сигнальным входам коммутатора, первая микроконтроллерная шина вывода через управляемую линию задержки подключена ко входу третьего формирователя зондирующих импульсов, вторая микроконтроллерная шина вывода соединена с первым входом второго распределителя импульсов, первый и второй выходы которого подключены соответственно ко входам первого и второго формирователей зондирующих импульсов, второй управляющий вход второго распределителя импульсов соединен с третьей микроконтроллерной шиной вывода и подключен к первому входу дешифратора, второй вход которого соединен с четвертой микроконтроллерной шиной вывода, а его первый и второй выходы подключены к соответствующим управляющим входах коммутатора, выход которого через усилитель-формирователь соединен с первым входом первого распределителя импульсов, второй вход которого подключен к седьмой микроконтроллерной шине вывода, его первый выход соединен с первым входом ждущего преобразователя напряжение - время и подключен к третьему входу дешифратора, второй выход первого распределителя импульсов подключен к первому входу дискриминатора времени, входы первого цифроаналогового преобразователя соединены с соответствующими входами второго цифроаналогового преобразователя, выход которого подключен ко второму входу управляемой линии задержки.
На фиг. 1 представлена блок-схема ультразвукового расходомера; на фиг. 2 и 3 - временные диаграммы, поясняющие его работу.
Ультразвуковой расходомер содержит измерительный участок 1 трубы, на первой образующей которого располагаются первый и второй приемно-передающие пьезопреобразователи 2 и 3 на расстоянии S друг от друга. На второй образующей диаметрально противоположно первой, напротив первого пьезопреобразователя 2 закреплен скошенный отражатель 4, а напротив второго пьезопреобразователя 3 скошенный отражатель 5. В каждой из двух плоскостей поперечного сечения трубы на расстоянии S/3 и 2S/3 от первого пьезопреобразователя закреплены третий приемно-передающий пьезопреобразователь 6 и плоский отражатель 7. Место крепления пьезопреобразователя 6 на трубе определяется пересечением плоскости поперечного сечения трубы с третьей образующей, проходящей через первую вершину вписанного в поперечное сечение равностороннего треугольника, а место крепления плоского отражателя 7 определяется пересечением плоскости поперечного сечения с четвертой образующей, проходящей через вторую вершину треугольника, причем третья вершина треугольника принадлежит второй образующей. Диаметрально против пьезопреобразователя 6 на расстоянии, равном внутреннему диаметру D трубы, закреплен четвертый приемный пьезопреобразователь 8. Угол скоса и осевая ориентация отражателей 4 и 5 обеспечивают распространение УЗК от пьезопреобразователя 2 к пьезопреобразователю 3 и в обратном направлении через отражатели 4, 5, 7 и поверхность пьезопреобразователя 6, используя эффект отражения, а длина этой ломаной пространственной траектории составляет пять с половиной диаметров D. Пьезопреобразователи 2, 3 и 6 соединены соответственно с выходами первого, второго и третьего формирователей 11, 10 и 9 зондирующих импульсов и подключены к первому, второму и третьему сигнальным входам коммутатора 12 приемных сигналов, выход которого через усилитель-формирователь 13 подключен ко входу первого стробируемого распределителя 14 импульсов. Приемный пьезопреобразователь 3 подключен к четвертому сигнальному входу коммутатора 12. Микроконтроллер 24 с дисплеем и клавиатурой 25 имеет порт вывода, состоящий из семи шин вывода, и порт ввода, включающий одну шину ввода. Первая микроконтроллерная шина вывода через управляемую линию 15 задержки соединена с входом третьего формирователя 9, а вторая шина вывода соединена с первым входом второго распределителя 16 импульсов, первый выход которого подключен к входу формирователя 11, а второй выход ко входу формирователя 10. Второй управляющий вход распределителя 16 импульсов соединен с третьей микроконтроллерной шиной вывода и подключен к первому входу дешифратора 17, два выхода которого соединены с соответствующими управляющими входами коммутатора 12. Источник 18 опорного напряжения через второй вход сумматора 19 подключен ко второму входу ждущего преобразователя 20 напряжение - время, первый вход которого соединен с первым выходом распределителя 14 импульсов и подключен к третьему входу дешифратора 17. Четвертая микроконтроллерная шина вывода подключена ко второму входу дешифратора 17, а пятая и шестая шины вывода подключены к входам второго ЦАП 21 и первого ЦАП 22. Выход второго ЦАП 21 подключен к управляющему входу линии 15 задержки, а выход первого ЦАП 22 соединен с первым входом сумматора 19. Седьмая микроконтроллерная шина вывода подключена ко второму стробирующему входу распределителя 14, второй выход которого подключен к первому входу дискриминатора 23 времени, второй вход которого соединен с выходом преобразователя 20 напряжение - время, а микроконтроллерная шина ввода подключена к выходу дискриминатора 23 времени. Так же как и в прототипе, пространственная траектория от пьезопреобразователя 2 к пьезопреобразователю 3 длиной L2 является информационной, а ее активная часть L'2 состоит из трех равнодлинных наклонных хорд, проходящих через середину радиуса R измерительного участка и имеющих одинаковый угол с осью потока. Зондирование по описанной информационной траектории позволяет застабилизировать значение гидродинамического коэффициента в широком диапазоне чисел Рейнольдса на осесимметричных потоках и наиболее полно учесть перераспределение локальных скоростей на периферии трубы при деформированных потоках, то есть увеличить точность измерения.
Ультразвуковой расходомер работает в два цикла - с опережающим и отстающим опорными сигналами. В циклах используются разные акустические базы опорных сигналов и одинаковые для информационных сигналов. Циклы состоят из двух тактов - по потоку и против, а в каждом такте обработке подлежат два приемных сигнала - опорный и информационный.
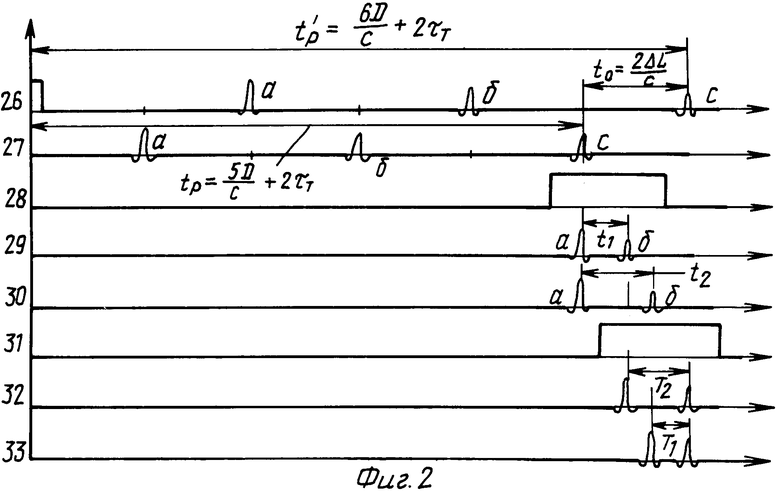
В любом цикле после возбуждения приемно-передающего пьезопреобразователя 6 импульсом 26 (фиг. 2) УЗК, распространяясь перпендикулярно потоку в направлении приемного пьезопреобразователя 8, создают у его поверхности однонаправленный импульс 27, а акустического давления, который схемой устройства не воспринимается. Отразившись от плоской поверхности пьезопреобразователя 8, УЗК распространяются в направлении пьезопреобразователя 6 и создают у его поверхности импульс 26, а акустического давления первой рециркуляции, который также не воспринимается схемой. Рециркулируя между поверхностями пьезопреобразователей до полного затухания, УЗК создают у поверхности пьезопреобразователя 8 последовательность импульсов акустического давления, состоящую из однонаправленного 27, а и импульсов 27,б, 27,с четных рециркуляций второй, четвертой и т.д., а у поверхности пьезопреобразователя 6 последовательность нечетных рециркуляций, то есть первой, третьей, пятой и т.д. В цикле с опережающим опорным сигналом аналогично прототипу полезным опорным является импульс 27, с четвертой рециркуляции, а в цикле с отстающим опорным сигналом - импульс 26,с пятой рециркуляции, которые и воспринимаются схемой.
В отличие от прототипа в заявленном устройстве при обработке временных интервалов циклично и поочередно используются два опорных сигнала - опережающий с акустической базой L1 = 5D и отстающий с акустической базой L'1 = 6D. Разность между интервалами времени распространения опережающего и отстающего опорных импульсов t0 = 2 Δ L/C=D/C зависит только от скорости C звука в контролируемой среде. При одинаковых протекторах пьезопреобразователей 6 и 8 разность времен свободна от твердотельных задержек и, так как источником УЗК и их рециркуляций является единый пьезопреобразователь 3, сигнальная задержка и ее дрейф, связанные с изменениями амплитуды опорных сигналов и искажением их формы, взаимно компенсируются.
В цикле с опережающим опорным сигналом и такте по потоку осуществляется возбуждение пьезопреобразователей 6 и 2. В этом такте пьезопреобразователь 2 является передающим, а возбужденные им УЗК, достигая скошенного отражателя 4, направляются к поверхности пьезопреобразователя 6, выполняющего роль отражателя для информационной траектории. Претерпев последовательные отражения от пьезопреобразователя 6, плоского отражателя 7, скошенного отражателя 5, УЗК достигают пьезопреобразователя 3, являющегося в этом такте приемным.
Заявленное устройство, вырабатывая импульс 28 временной селекции (строб), воспринимает опережающий опорный импульс 29,а и по истечении времени t1 - информационный импульс 29,б. В том же цикле, в такте против потока формирование опережающего опорного импульса 30, а производится так же, а информационного импульса 30,б аналогично, с той разницей, что приемным является пьезопреобразователь 2, а передающим - пьезопреобразователь 3, УЗК, генерируемые им, претерпевают те же отражения, но в зеркальной последовательности, а интервал времени между опережающим опорным и информационным импульсами составляет t2.
В цикле с отстающим опорным сигналом селекция "дуплета" из информационного и опорного импульсов осуществляется за счет изменения временного расположения строба 31. Формирование опорного импульса в такте по потоку осуществляется аналогично, с той разницей, что интервал времени между информационным импульсом 32, б и опережающим опорным импульсом 32, а составляет T2, а в такте против потока этот интервал времени между информационным и опорным импульсами 33,а и 33,б соответственно составляет T1.
Длина акустической базы информационных импульсов во всех циклах и тактах одинаковая и составляет 5,5 D, а во времени их распространения, так же как и в случае опорных сигналов, присутствуют две твердотельные задержки, которые автоматически компенсируются в каждом времени t1, t2, T1 и T2 выбором одинаковых протекторов всех пьезопреобразователей. Составляющие сигнальных задержек δτ2 и δτ3 , вызванные колебаниями амплитуды информационных импульсов, устраняются детектированием по нуль переходам, а автоматическая компенсация задержек от искажения формы осуществляется следующим образом.
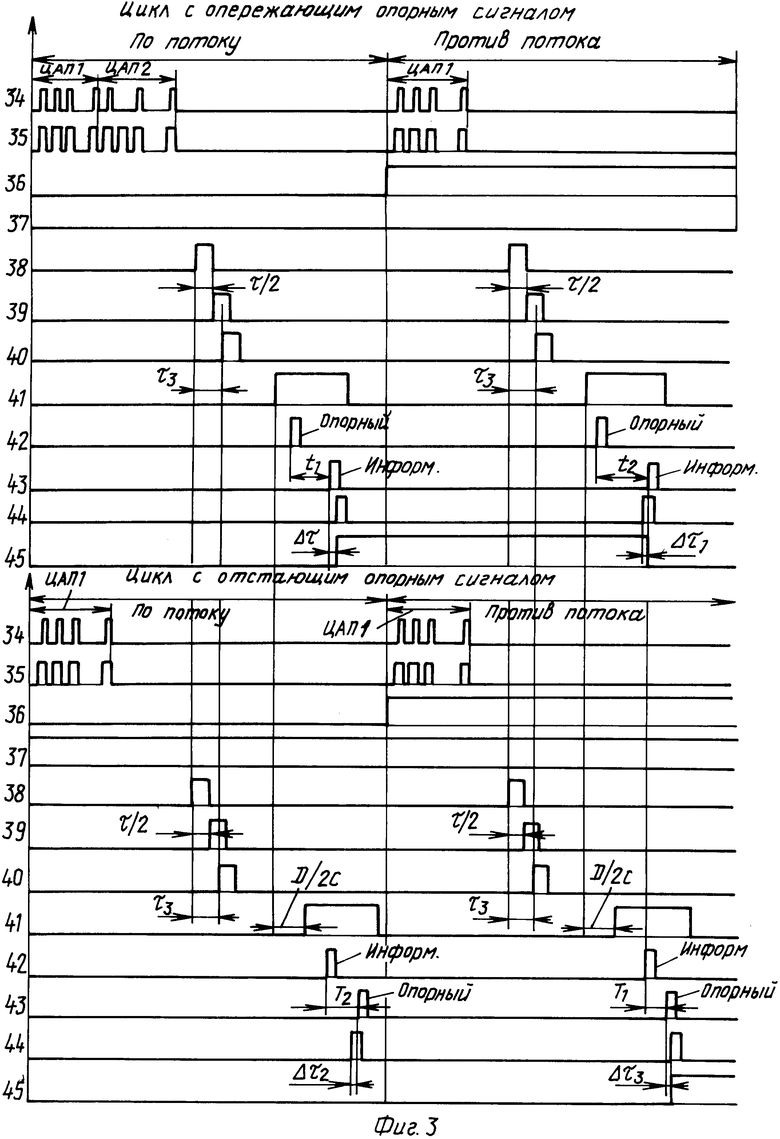
В цикле с опережающим опорным сигналом в такте по потоку перед зондированием среды по пятой и шестой шинам вывода, образующим последовательный интерфейс, осуществляется выбор первого ЦАП 22, при этом по пятой шине для его инициализации подается адресная кодовая посылка, а вслед за ней - рабочий код k1 (фиг. 3, поз. 34), а по шестой шине подается синхронизирующая частота 35.
Инициализация второго ЦАП 21 производится аналогично, с той разницей, что подается его адрес и вводится корректирующий код k3. На третьей и четвертой шинах устанавливаются логические 0 (поз. 36 и 37), а определяемое текущим кодом k3 выходное напряжение второго ЦАП 21 поступает на управляющий вход линии 15 задержки и определяет ее значение τ3 , диапазон изменения которого находится в пределах от 0 до τ в зависимости от напряжения на управляющем входе. После подготовительных операций на первой шине вывода формируется импульс возбуждения 38, а на второй шине с задержкой τ/2 импульс возбуждения 39. В зависимости от напряжения на управляющем входе линии 15 задержки фронт импульса 40 на ее выходе _может опережать или отставать от фронта импульса 39 на время τ/2 , совпадать с ним или занимать какое-либо промежуточное положение. Импульсы 39 и 40, поступая на входы соответственно формирователей 11 и 9, умощняются и возбуждают пьезопреобразователи 2 и 6 соответственно. Дешифратор 17 устанавливает на управляющих входах коммутатора 12 кодовую комбинацию, которая подключает его четвертый сигнальный вход к выходу для приема опережающего опорного импульса с пьезопреобразователя 8. После возбуждения пьезопреобразователей 2 и 6 УЗК распространяются по информационной траектории вдоль потока и в опорной траектории, причем приемные однонаправленный 27, а и импульсы 27,б; 27,с второй, четвертой и т.д. рециркуляций поступают на вход усилителя-формирователя 13, усиливаются и детектируются по нуль-переходам. Зарегистрированные приемные сигналы, действующие на первом входе первого распределителя 14 не выводятся на его выходы до поступления разрешающего строба 41, который формируется на седьмой шине вывода в момент времени, предшествующий поступлению опережающего опорного импульса. Длительность строба 41 позволяет выделять из рассмотренных последовательностей только опережающий опорный и информационный. Распределитель 14 импульсов при стробировании двух импульсов первый из них направляет по первому входу, а второй - по второму.
Опережающий опорный импульс 42 на первом выходе распределителя 14 поступает на первый вход ждущего преобразователя 20 и третий вход дешифратора 17, который формирует на управляющих входах коммутатора 12 другую кодовую комбинацию, соединяющую его второй сигнальный вход с выходом, для приема информационного импульса. Одновременно осуществляется запуск ждущего преобразователя 20, причем на его первом входе действует сумма напряжений от источника 18 опорного напряжения и ЦАП 22, определяемая текущим кодом k1. При поступлении информационного импульса 43, отстоящего от опорного на время t1, со второго выхода распределителя 14 дискриминатор 23 времени сопоставляет временное расположение его фронта с фронтом выходного импульса 44 ждущего преобразователя 20 и вырабатывает логическое управляющее воздействие 45, которое поступает в микроконтроллер 24 по шине ввода и осведомляет его о направлении коррекции кода k1. Таким образом, шина ввода замыкает первый контур регулирования.
В том же цикле в такте против потока работа ультразвукового расходомера аналогичная, с той разницей, что задействован второй контур регулирования, загружается кодом k2 только первый ЦАП 22, на третьей шине вывода устанавливается логическая 4, импульс 39 поступает на вход формирователя 10 и возбуждаются пьезопреобразователи 3 и 6, последовательные кодовые комбинации на выходах дешифратора 17 обеспечивают прием информационного импульса 43 против потока, отстоящего от опорного на время t2, а микроконтроллер 24 получает осведомление о направлении его коррекции кода k2.
В цикле с отстающим опорным импульсом в такте по потоку работа ультразвукового расходомера аналогичная, с той разницей, что задействован третий контур регулирования, загружается кодом K2 только первый ЦАП 22, на третьей шине вывода устанавливается логический 0, а на четвертой шине вывода - логическая 1, импульс 39 поступает на формирователь 11 и возбуждаются пьезопреобразователи 2 и 6, формирование строба 41 задерживается микроконтроллером 24 на время D/2C. последовательные кодовые комбинации на выходах дешифратора 17 обеспечивают прием информационного импульса 42 с пьезопреобразователя 3 и опорного импульса 43 с пьезопреобразователя 6, отстающего от информационного на время T2, сопоставляются фронты импульса 44 с ждущего преобразователя 20 и опорного импульса 43, а микроконтроллер 24 получает осведомление 45 о направлении коррекции кода K2.
В том же цикле в такте против потока работа устройства аналогичная, с той разницей, что задействован четвертый контур регулирования, загружается кодом K1 только первый ЦАП 22, на третьей и четвертой шинах вывода устанавливаются логические 1, импульс 39 поступает на формирователь 10, возбуждая пьезопреобразователи 3 и 6, формирование строба 41 осуществляется с задержкой D/2C, последовательно образующиеся кодовые комбинации на выходах дешифратора 17 обеспечивают прием информационного импульса 42 с пьезопреобразователя 2 и опорного импульса 43 с пьезопреобразователя 6, отстающего от информационного на время T1, сопоставляются фронты импульса 44 с ждущего преобразователя 20 и опорного импульса 43, а результат сопоставления 45 осведомляет микроконтроллер 24 о направлении коррекции кода K1.
При значении задержки τ3= τ/2 в линии 15 задержки происходит одновременное возбуждение опорных и информационных сигналов. В этом случае, как и в прототипе, абсолютные значения задержек в формирователях зондирующих импульсов автоматически компенсируются, так как обрабатываются разностные интервалы времени, а функция преобразования устройства по скорости V потока в циклах с опережающим опорным сигналом, как и в прототипе, имеет вид
где
Δ L = L2 - L1 = D/2 - разность длин информационной и первой опорной акустических баз.
Мерой скорости потока является разность Δ k = k1 - k2 между кодом, формируемым в такте по потоку и кодом против потока. При тех же условиях функция преобразования устройства по скорости V потока в циклах с отстающим опорным сигналом, имеет вид
где
δ L = L'1 - L2 = D/2 - разность длин второй опорной и информационной акустических баз, а мерой скорости потока является разность Δ K = K1 - K2 между кодом против потока и кодом по потоку.
Так как время t0 между опережающим и отстающим опорными импульсами свободно от инструментальных искажений и неизменно в двух последовательных циклах, то любые ошибки при определении времен t1 и t2 и соответствующая им погрешность измерения Δ k в циклах с опережающим опорным импульсом приведут к таким же ошибкам и погрешности измерения Δ K в циклах с отстающим опорным сигналом, но с противоположным знаком. Смысл автоматической компенсации этих ошибок заключается в том, что микроконтроллер после коррекции текущих кодов определяет полусумму  и после соответствующего масштабирования с помощью клавиатуры выводит ее на дисплей 25 как скорость потока, объемный расход или объем.
и после соответствующего масштабирования с помощью клавиатуры выводит ее на дисплей 25 как скорость потока, объемный расход или объем.
Источниками нескомпенсированных задержек при τ3≠ τ/2 информационных импульсов являются следующие:
- задержки в формирователях 9, 10 и 11 зондирующих импульсов;
- начальная асимметрия опорных и информационных траекторий ΔL = δL , которая возникает из-за технологической невозможности точного установления расстояния D между пьезопреобразователями 6 и 8 и длины информационной акустической базы, равной 5,5 D;
- искажения формы приемных сигналов на потоке, приводящие к сигнальным задержкам.
Описанные источники приводят к рассимметрированию во временном расположении информационных сигналов в циклах относительно опорных как в неподвижной среде, так и на потоке: t1≠T1 и t2≠T2.
Компенсация всех задержек, то есть симметрирование информационных сигналов в циклах, осуществляется за счет создания опережений или задержек τ3 возбуждения формирователя 9 в опорных каналах, что эквивалентно сдвигу импульсных последовательностей 26 и 27 рециркулируемых сигналов (фиг. 2) соответственно влево или вправо.
Автоматическую компенсацию задержек осуществляет пятый контур регулирования, содержащий второй ЦАП 21, управляемую линию 15 задержки и дискриминатор 23 ошибки, реализованный в микроконтроллере 24, который работает следующим образом.
После каждых двух циклов работы микроконтроллер сопоставляет откорректированные текущие коды k1, k2, K1 и K2. Если k1 > K1 и k2 > K2, то микроконтроллер уменьшает код k3, которым загружается второй ЦАП 21, его выходное напряжение и задержка линии 15 уменьшаются и осуществляется симметрирование информационных импульсов за счет сдвига последовательностей 26 и 27 влево. Если k1 < K1 и k2 < K2, то микроконтроллер увеличивает код k3, выходное напряжение ЦАП 21 и задержка τ3 увеличиваются, что обеспечивает симметрирование за счет сдвига последовательностей 26 и 27 вправо. Регулирование осуществляется до установления равенства кодов k1 = K1 и k2 = K2, при котором код k3 остается без изменений. Случаи, когда k1 > K1; k2 < K2 и k1 < K1; k2 > K2 используются для диагностики неисправности устройства. Таким образом пятый контур осуществляет автоматическую компенсацию погрешностей измерений, вызванных нарушением заданной геометрии измерительного участка, неустраненных задержек в контурах регулирования и сигнальных задержек δτ2 и δτ3 от искажения формы информационных сигналов, что повышает точность измерения.
Неодновременность возбуждения в циклах и тактах опорных и информационных импульсов вызывает мультипликативную составляющую погрешности
где Δτ = τ3-τ/2 ,
а изменение соотношения задержек при старении или от температуры приводит к аддитивной составляющей погрешности
что не превышает тысячные доли процента, в то время как в прототипе аналогичные задержки предопределяют погрешности, исчисляемые единицами и даже десятками процентов.
Предложенное устройство не имеет специальных калибровочных тактов каждый такт является рабочим, а результаты обработки в нем учитываются в выходной измерительной информации. Способ, на котором реализовано устройство, предполагает создание отсчетной временной базы между двумя опорными сигналами в двух циклах и симметричное расположение информационных импульсов в ней за счет геометрии измерительного участка, одинаковую чувствительность преобразования в циклах с равными, но противоположными по знаку погрешностями измерения от ошибок в определении времен распространения всех сигналов, автоматический перенос этих ошибок без определения их абсолютных величин во время распространения опорных сигналов с помощью пятого контура регулирования и автоматическую компенсацию погрешности измерения из-за сигнальных задержек за счет предложенной методики обработки текущих кодов в циклах.
Как и в прототипе, предложенное устройство для стабилизации ждущего преобразователя 20 напряжение - время с обратной зависимостью и возможности самодиагностики предполагает использование калибровочного устройства по патенту РФ N 2082951, кл. G 01 F 1/66.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАЛИБРОВОЧНОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО РАСХОДОМЕРА | 1995 |
|
RU2082951C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА | 1998 |
|
RU2152597C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА ПОВЫШЕННОЙ ТОЧНОСТИ | 1998 |
|
RU2152596C1 |
| СПОСОБ ПОЛУЧЕНИЯ И ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2097940C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР | 2002 |
|
RU2210062C1 |
| ЭНЕРГЕТИЧЕСКАЯ ЭЛЕКТРОЯДЕРНАЯ УСТАНОВКА | 1993 |
|
RU2035072C1 |
| ФОРМИРОВАТЕЛЬ СИГНАЛОВ ДЛЯ УСТРОЙСТВ НИЗКОЧАСТОТНОЙ ФИЗИОТЕРАПИИ | 1995 |
|
RU2113248C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ СИГНАЛОВ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1997 |
|
RU2111504C1 |
| СИСТЕМА СИНХРОННОГО ВРЕМЕННОГО ГРУППООБРАЗОВАНИЯ | 1995 |
|
RU2096916C1 |
Изобретение содержит измерительный участок, включающий один приемный 8 и три приемопередающих 2, 3, 6 пьезопреобразователя, и три отражателя 4, 5, 7, микроконтроллер 24, три формирователя зондирующих импульсов 9, 10, 11, коммутатор 12, усилитель-формирователь 13, два распределителя импульсов 14, 16, управляемую линию задержки 15, дешифратор 17, источник опорного напряжения 18, сумматор 19, ждущий преобразователь напряжение - время с обратной зависимостью 20, дискриминатор времени 23 и два цифроаналоговых преобразователя 21, 22. Измерительный участок имеет заданные геометрические соотношения информационной и опорной траекторий распространения ультразвуковых колебаний (УЗК). В двух рабочих циклах расходомера - с опережающим и отстающим опорными сигналами используются разные акустические базы опорных сигналов и одинаковые для информационных сигналов. Циклы состоят из двух тактов: по и против потока. В каждом такте обработке подлежат два приемных сигнала - опорный и информационный. Определенная методика обработки текущих кодов в циклах обеспечивает автоматическую компенсацию ошибок при определении интервалов времени распространения УЗК. 3 ил.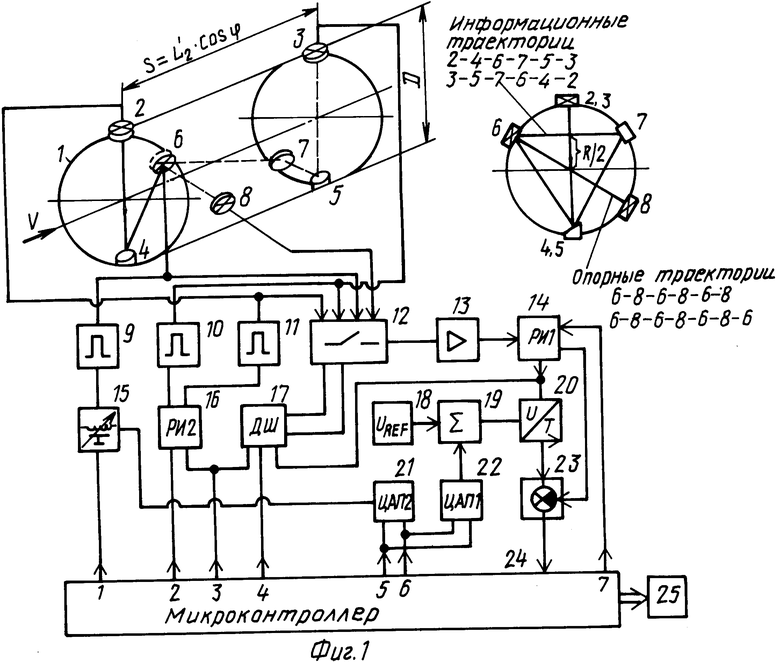
Ультразвуковой расходомер, включающий измерительный участок трубы с закрепленными на первой образующей на расстоянии S друг от друга первым и вторым приемно-передающим пьезопреобразователями и диаметрально противоположными им двумя скошенными отражателями на второй образующей, третьим пьезопреобразователем и плоским отражателем соответственно в точках пересечения первой и второй плоскостей поперечного сечения трубы, делящих расстояние S на три равные части, с третьей и четвертой образующими, проходящими через две вершины вписанного в поперечное сечение равностороннего треугольника, третья вершина которого принадлежит второй образующей, и четвертым приемным пьезопреобразователем, диаметрально противоположным третьему пьезопреобразователю, а также микроконтроллер с портами ввода и вывода, дисплеем и клавиатурой, подключенный к пятой и шестой микроконтроллерным шинам вывода первый цифроаналоговый преобразователь, выход которого через первый вход сумматора соединен с вторым входом ждущего преобразователя напряжение - время с обратной зависимостью, выход которого через второй вход дискриминатора времени подключен к микроконтроллерной шине ввода, источник опорного напряжения, подключенный к второму входу сумматора, первый формирователь зондирующих импульсов, коммутатор, сигнальные входы которого подключены соответственно к первому, второму, третьему и четвертому пьезопреобразователям, и усилитель-формирователь, отличающийся тем, что в него введены управляемая линия задержки, первый и второй распределители импульсов, дешифратор, второй цифроаналоговый преобразователь, второй и третий формирователь зондирующих импульсов, а длина траектории распространения ультразвуковых колебаний от первого пьезопреобразователя к второму и в обратном направлении через поверхности отражателей и третьего пьезопреобразователя, выполненного приемно-передающим, составляет 5,5 внутренних диаметров трубы, при этом выходы всех формирователей зондирующих импульсов подключены соответственно к первому, второму и третьему сигнальным входам коммутатора, первая микроконтроллерная шина вывода через управляемую линию задержки подключена к входу третьего формирователя зондирующих импульсов, вторая микроконтроллерная шина вывода соединена с первым входом второго распределителя импульсов, первый и второй выходы которого подключены соответственно к входам первого и второго формирователей зондирующих импульсов, второй управляющий вход второго распределителя импульсов соединен с третьей микроконтроллерной шиной вывода и подключен к первому входу дешифратора, второй вход которого соединен с четвертой микроконтроллерной шиной вывода, а его первый и второй выходы подключены к соответствующим управляющим входам коммутатора, выход которого через усилитель-формирователь соединен с первым входом первого распределителя импульсов, второй вход которого подключен к седьмой микроконтроллерной шине вывода, его первый выход соединен с первым входом ждущего преобразователя напряжение - время и подключен к третьему входу дешифратора, второй выход первого распределителя импульсов подключен к первому входу дискриминатора времени, входы первого цироаналогового преобразователя соединены с соответствующими входами второго цифроаналогового преобразователя, выход которого подключен к второму входу управляемой линии задержки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

