Изобретение относится к устройствам для исследования неоднородности материалов и может быть использовано для ультразвуковой интроскопии вещества.
Известен акустический микроскоп [1], содержащий акустический объектив, генератор зондирующих импульсов, циркулятор, усилитель, детектор, осциллограф и блок сканирования. Акустический объектив представляет собой цилиндр, выполненный из хорошо проводящего ультразвук материала, например, сапфира, на одном торце которого помещен плоский пьезопреобразователь, а на другом имеется сферическое углубление, играющее роль фокусирующей акустической линзы. Выводы пьезопреобразователя образуют вход-выход акустического объектива. Если к нему приложены электрические колебания, пьезопреобразователь излучает плоскую волну, падающую на поверхность акустической линзы, помещенной в каплю иммерсионной жидкости, например, воды. Акустическая линза превращает плоскую волну в фокусированный пучок. Наоборот, если в окрестности фокуса линзы поместить излучатель ультразвуковых колебаний, он будет преобразован линзой в плоские волны, которые, падая на поверхность пьезопреобразователя, частично преобразуются в электрические колебания. В данном устройстве выход генератора зондирующих импульсов соединен со входом циркулятора, вход-выход которого соединен со входом-выходом акустического объектива, а выход подключен ко входу усилителя. Усилитель, детектор и осциллограф (вход Z) соединены последовательно. Исследуемый объект закрепляют в держателе блока сканирования, который связан со входами X и Y осциллографа.
Микроскоп работает следующим образом. В область фокуса акустического объектива помещают исследуемый объект. Генератор зондирующих импульсов периодически генерирует одиночные электрические импульсы или пакеты импульсов, которые преобразуются акустическим объективом в акустические импульсы, падающие на исследуемый объект и частично отражаемые им. Отраженные ультразвуковые колебания через некоторое время попадают обратно на акустический объектив и преобразуются им в электрические колебания, которые затем приходят на вход усилителя. Циркулятор выполняет роль коммутатора акустического объектива, препятствующего попаданию сигнала с выхода генератора зондирующих импульсов на вход усилителя, но пропускающего выходной сигнал генератора на акустический объектив и принятый объективом сигнал на вход усилителя. Усиленные и продетектированные импульсы попадают на вход Z (вход модулятора яркости) осциллографа, таким образом, яркость луча на экране пропорциональна амплитуде отраженного объектом излучения и связана с неоднородностью структуры объекта в области фокуса микроскопа. Чтобы получить двумерное акустическое изображение объекта, блок сканирования производит быстрые колебания исследуемого объекта вдоль одного направления при медленном непрерывном движении в перпендикулярном направлении, сканируя фокусом микроскопа выбранную плоскость внутри объекта. Луч на экране осциллографа движется по такой же траектории. Таким образом, на экране строится акустическое изображение, яркость точки которого пропорциональна коэффициенту отражения соответственной точки исследуемого объекта.
К числу недостатков указанного устройства относится отсутствие автоматического управления процессом исследования, а также невозможность обрабатывать полученную информацию до ее отображения на экране электронно-лучевой трубки.
Известен также акустический микроскоп [2], в котором усиленный выходной сигнал акустического объектива дискретизуется и запоминается, затем может быть обработан и отображен в реальном времени исследования объекта. Микроскоп содержит электромеханический блок развертки по двум координатам. В качестве генератора зондирующих импульсов используют последовательно соединенные кварцевый генератор, делитель частоты, счетчик и усилитель-формирователь. Выход усилителя-формирователя соединен со входом-выходом акустического объектива. Для усиления и регистрации принятого акустическим объективом сигнала микроскоп содержит последовательно соединенные усилитель-ограничитель, вход которого соединен с входом-выходом акустического объектива, усилитель с регулируемым коэффициентом усиления, аналоговый ключ, детектор с программируемым сдвигом постоянной составляющей, видеоусилитель с регулируемым коэффициентом усиления, блок хранения и выборки (БХВ), аналого-цифровой преобразователь (АЦП). Микроскоп также содержит блок управления и обработки (БУО), блок отображения информации (БОИ), блок хранения информации (БХИ), блок ввода и вывода информации (БВВИ), цифроаналоговый преобразователь (ЦАП), шаговый двигатель и блок памяти. Причем БОИ, БХИ и БВВИ подключены к БУО, ЦАП включен между выходом смещения нуля БУО и управляющим входом детектора, блок памяти соединен с БУО, делителем частоты и счетчиком, усилитель с регулируемым коэффициентом усиления, шаговый двигатель и видеоусилитель также подключены к БУО, выход АЦП соединен с информационным входом БУО, второй, третий и четвертый выходы счетчика соединены с входами управления БХВ, АЦП и аналогового ключа, второй вход счетчика подключен к выходу кварцевого генератора.
Акустический микроскоп работает следующим образом.
В область фокуса акустического объектива помещают исследуемый объект.
Кварцевый генератор выдает опорные импульсные сигналы с частотой 100 или 200 МГц. В делителе частоты путем деления частоты следования этих импульсов формируются импульсы с заданным интервалом времени, которые затем используются для синхронизации работы устройства. Коэффициент деления делителя частоты задается блоком памяти, содержимое которого в каждом цикле работы устройства обновляется с помощью БУО. Счетчик формирует на своих выходах зондирующий сигнал, а также сигналы управления аналоговым ключом, УВХ и АЦП.
С выхода счетчика зондирующий сигнал подается на усилитель-формирователь, где из него формируется импульс специальной формы, который преобразуется акустическим объективом в ультразвуковой сигнал, излучается в исследуемый объект и принимается акустическим объективом после отражения от объекта.
Отраженный импульс предварительно усиливается и ограничивается до уровня, не превышающего порогового значения в усилителе-ограничителе. Величина порога ограничения выбирается из условия обеспечения защиты усилителя-ограничителя от пробоя выходным сигналом усилителя-формирователя.
Далее в усилителе с программируемым коэффициентом усиления Ку он усиливается и подается на аналоговый ключ. Величина Ку программируется в БУО так, что максимальный принимаемый сигнал не приводит к переполнению АЦП. Аналоговый ключ осуществляет выборку принятого импульса в интервале времени, задаваемом стробом от счетчика.
В детекторе происходит детектирование входного сигнала со сдвигом постоянной составляющей на величину, задаваемую БУО через ЦАП. Сдвиг постоянной составляющей необходим для улучшения изображения, если принимаемый сигнал искажен шумом и помехами от посторонних объектов.
После детектирования сигнал усиливается видеоусилителем, коэффициент усиления которого задается БУО.
БХВ запоминает поступивший на него сигнал на заданный стробом от счетчика временной интервал, который определяется временем аналого-цифрового преобразования в АЦП.
Информация, преобразованная с помощью АЦП из аналоговой в цифровую, затем поступает в БУО, который управляет процессом получения и отображения информации. В течение одного цикла БУО изменяет параметры приемопередающего тракта, адаптируя его работу к параметрам объекта в зависимости от его свойств, задает все временные интервалы, коэффициенты усиления усилителей, а также величину сдвига постоянной составляющей детектора.
Для исследования всей поверхности объекта акустический объектив установлен с возможностью перемещения по трем координатам с помощью шагового двигателя, при этом шаг сканирования задается с помощью сигналов от БУО.
Полученное изображение структуры объекта при сканировании отображается на БОИ. Блок ввода и вывода информации позволяет вручную выбирать режим работы микроскопа и распечатывать полученное изображение.
Недостатками акустического микроскопа являются:
- наличие непосредственной электрической связи между выходом усилителя-формирователя и входом усилителя-ограничителя, что может приводить к проникновению шумов усилителя-формирователя на вход усилителя-ограничителя;
- отсутствие датчиков положения акустического объектива и, следовательно, невозможность измерения его координат в процессе исследования объекта;
- отсутствие независимых приводов по всем трем координатам, вследствие чего невозможно, например, корректировать расстояние между акустическим объективом и объектом в процессе сканирования.
Указанное устройство выбрано в качестве прототипа предложенного решения, как совпадающее с ним по максимальному количеству признаков.
Техническая задача заключается в расширении функциональных возможностей, повышении надежности и снижении погрешности измерений. А именно, заявляемое устройство, в отличие от прототипа, позволяет реализовать ряд методик объемного сканирования исследуемого объекта, включающих контроль текущего положения акустического объектива, при этом точность дискретизации отраженного от объекта сигнала в пространстве и времени повышается за счет контроля положения акустического объектива и устранения шума усилителя-формирователя зондирующих импульсов во время приема этого сигнала. Малогабаритный акустический микроскоп содержит электромеханический блок, состоящий из привода X, сопряженного с кареткой, установленной на первых направляющих; привод Y, установленный на каретке и сопряженный с рамкой, установленной на вторых направляющих; акустический объектив, установленный на рамке, устройство формирования потока жидкости и блок управления сканированием, первичной обработки и регистрации информации. Блок управления сканированием, первичной обработки и регистрации информации содержит генератор зондирующих импульсов, усилитель-формирователь, малошумящий усилитель, стробирующий ключ, устройство выборки-хранения и аналого-цифровой преобразователь, причем выход генератора зондирующих импульсов соединен со входом усилителя-формирователя, а малошумящий усилитель, стробирующий ключ, устройство выборки-хранения и аналого-цифровой преобразователь соединены последовательно. Для решения технической задачи в малогабаритный акустический микроскоп введен привод Z акустического объектива, датчик перемещения X, датчик перемещения Y, датчик перемещения Z и блок включения и выключения потока жидкости, при этом привод Z состоит из пьезоэлементов с толкателями и прижимами и держателя с акустическим объективом, причем упругие толкатели и прижимы установлены с возможностью взаимодействия с держателем, при этом вторые направляющие выполнены в виде плоских пружин, а привод Y кинематически развязан с рамкой в плоскости, перпендикулярной оси перемещения рамки. В блок управления сканированием, первичной обработки и регистрации информации введены первый и второй электронные коммутаторы (ключи) акустического объектива, первый и второй узлы задержки, первый и второй генераторы импульсов и контроллер, при этом вход первого ключа объектива подключен к выходу усилителя-формирователя, выход первого ключа объектива и вход второго ключа объектива подключены к входу-выходу акустического объектива блока, выход второго ключа объектива соединен со входом малошумящего усилителя, первый узел задержки, первый генератор импульсов, второй узел задержки и второй генератор импульсов соединены последовательно, выходы первого и второго генераторов импульсов соединены со входами управления устройства выборки-хранения и аналого-цифрового преобразователя соответственно, выход управления генератором зондирующих импульсов контроллера соединен с входом управления генератора зондирующих импульсов, выходы управления первым и вторым ключами объектива и выход управления стробирующим ключом контроллера соединены со входами управления первого и второго ключей объектива и стробирующего ключа соответственно, выход управления дискретизацией контроллера соединен со входом сигнала первого узла задержки, выход задержки контроллера соединен со входом управления первого узла задержки, вход данных контроллера подключен к выходу данных аналого-цифрового преобразователя, вход-выход интерфейса IBM PC/AT - совместимой ЭВМ контроллера образует одноименный вход-выход блока, выход управления приводом X, выход управления приводом Y, выход управления приводом Z и выход управления потоком жидкости контроллера образуют одноименные выходы блока, а входы координат X, Y и Z образуют одноименные входы блока соответственно.
На фиг. 1 изображена блок-схема акустического микроскопа; на фиг. 2 - электромеханический блок с приводами; на фиг. 3 - сечение А-А на фиг.2; на фиг. 4 - пьезопривод; на фиг. 5 - профиль образующей винта; на фиг. 6 - пьезопривод в разрезе; на фиг. 7 - муфта; на фиг. 8 - прижим; на фиг. 9 - привод Y; на фиг. 10 - устройство формирования потока жидкости; на фиг. 11 - блок включения и выключения потока жидкости; на фиг. 12 - датчик перемещения Z; на фиг. 13 - функциональная схема блока управления и обработки данных; на фиг. 14 - принципиальная схема контроллера; на фиг. 15 - принципиальная схема генератора импульсов; на фиг. 16 - принципиальная схема усилителя-формирователя; на фиг. 17 - принципиальная схема первого узла задержки; на фиг. 18 - принципиальная схема второго узла задержки; на фиг. 19 - принципиальная схема блоков управления приводами X и Y; на фиг. 20 - принципиальная схема блока управления приводом Z.
Акустический микроскоп (фиг.1) состоит из электромеханического блока 1 с акустическим объективом 2, привода 3 по координате X, привода 4 по координате Y, привода 5 по координате Z, датчиков перемещения 6, 7 и 8 соответственно по координатам X, Y и Z, блоков управления 9, 10 и 11 соответствующими приводами, блока включения и выключения потока жидкости 12, а также из блока управления и обработки данных 13. Посредством интерфейсных средств блока управления и обработки данных 13 акустический микроскоп подключен к IBM PC/AT - совместимой микроЭВМ (ЭВМ), в сопряжении с которой работает данный микроскоп.
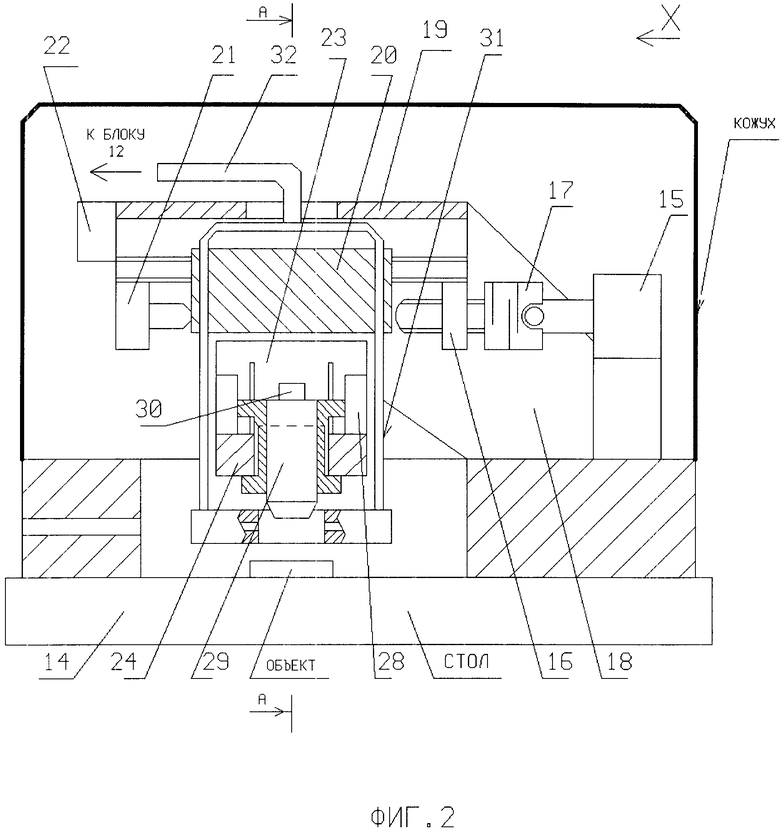
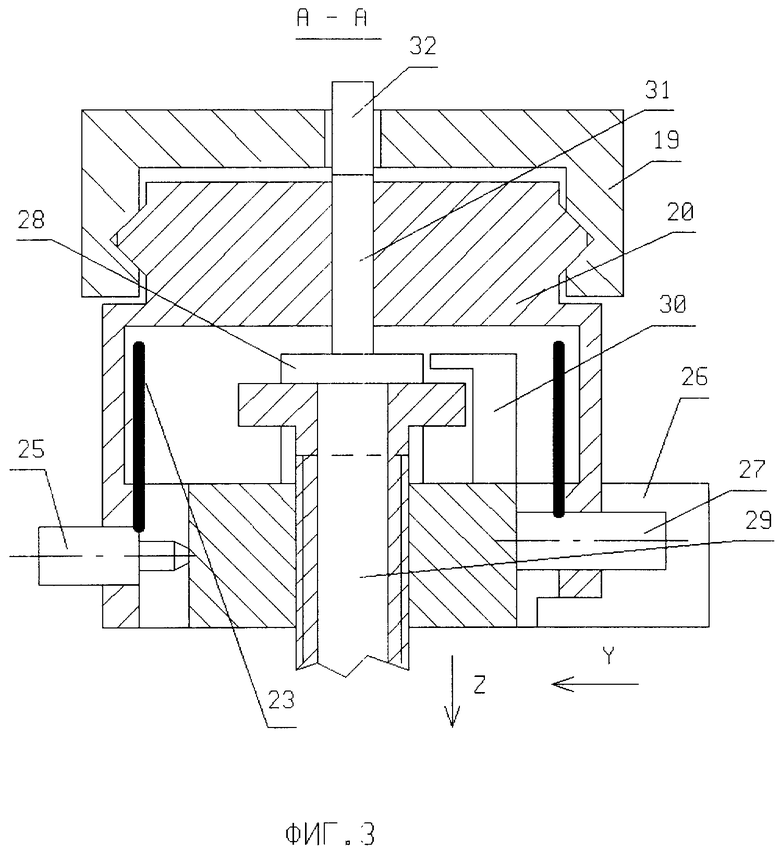
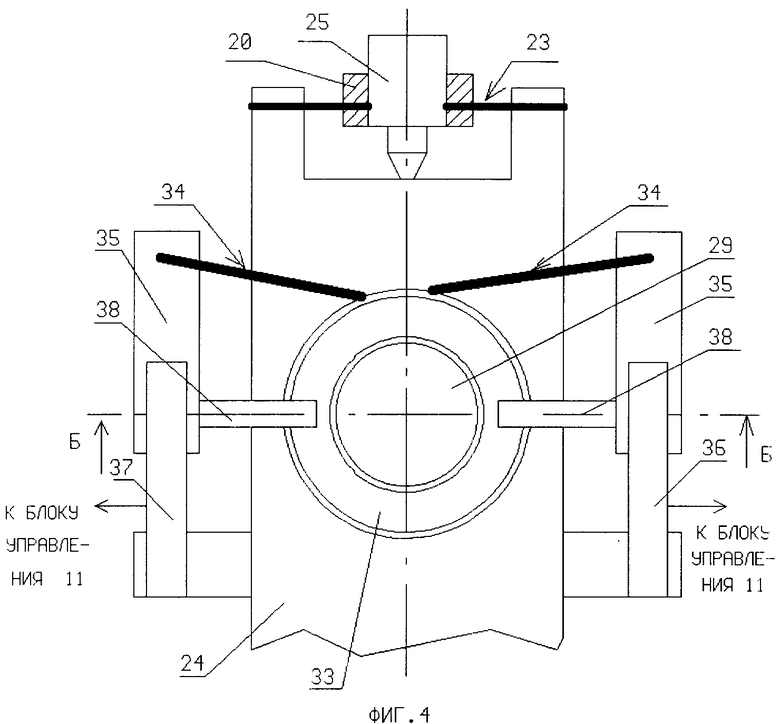
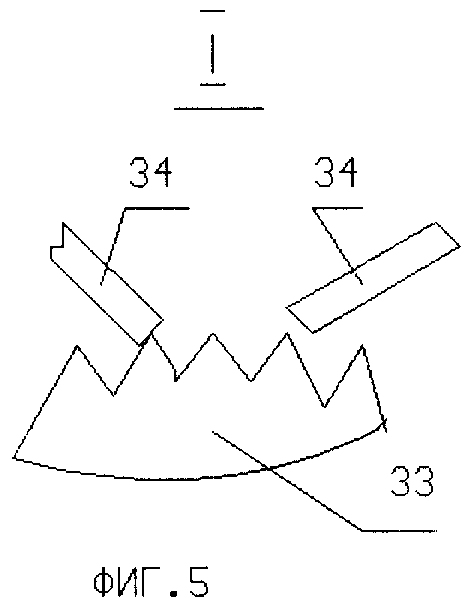
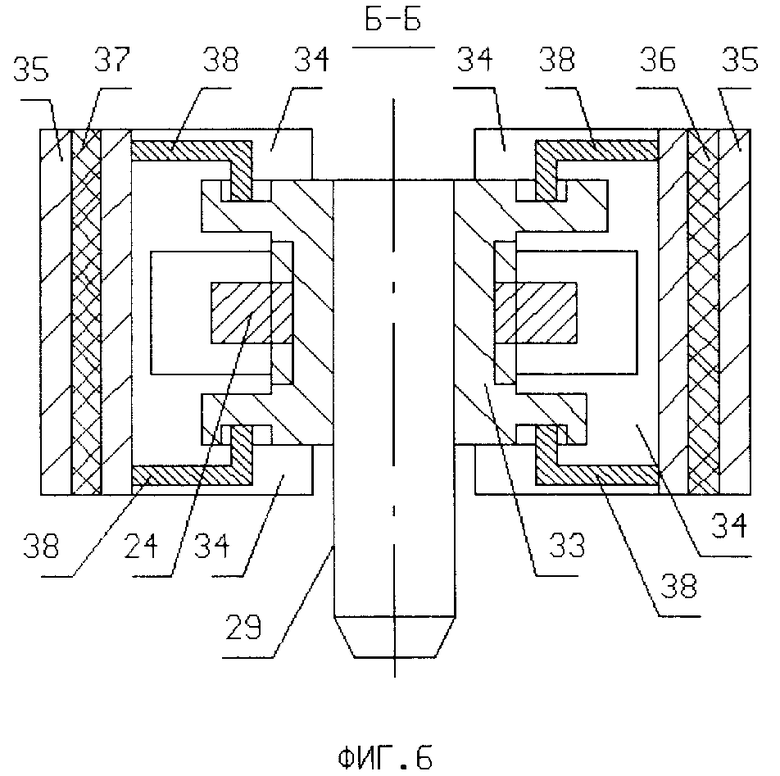
Электромеханический блок с приводами и датчиками (фиг. 2 - 4) состоит из основания 14, на котором установлены двигатель 15 (см., например, [3]) и передаточный механизм 16, например, бронзовая гайка, сопряженные с винт-муфтой 17. На основании 14 посредством кронштейна 18 закреплены также направляющие 19, которые могут представлять собой направляющие качения, скольжения и т. п. (см., например, [4]). На направляющих 19 установлена с возможностью перемещения по координате X платформа 20, сопряженная с прижимом 21 и датчиком перемещения X 22 (см., например, [5]). На платформе 20 посредством упругих направляющих 23 (например, Ш-образных, см. [6]) с возможностью перемещения по координате Y установлена рамка 24, сопряженная с прижимом 25, датчиком перемещения Y 26 (см. например, [5]) и приводом 27. Направляющие 23 могут быть закреплены на рамке 24 и платформе 20 посредством накладок, шпонок, клея, сварки и т.п. На рамке 24 посредством привода Z 28 установлен акустический объектив 29, сопряженный с датчиком перемещения Z 30. На платформе 20 установлено также устройство формирования потока жидкости 31, соединенное гибким трубопроводом 32 с блоком включения и выключения потока жидкости 12. При необходимости электромеханический блок может быть защищен кожухом. Привод Z 28 (фиг. 4 - 6) состоит из держателя с наружной резьбой 33, в котором установлен акустический объектив 29. Пропорции на указанных фигурах несколько искажены для выделения функциональных элементов. Держатель 33 сопряжен резьбой с рамкой 24, а также с упругими толкателями 34, закрепленными посредством держателей 35 на пьезобиморфах 36 и 37 (см., например, [7]), установленных в свою очередь на рамке 24. Образующая держателя 33 (фиг.5) представляет собой зубчатый профиль. На держателях 35 закреплены также Г-образные фиксаторы 38, находящиеся во взаимодействии с пазами держателя 33.
Пьезопривод в разрезе (фиг.6) выглядит следующим образом. Держатель 33 имеет кроме осевой симметрии симметрию относительно плоскости, перпендикулярной его оси. Относительно этой же плоскости имеют симметрию упругие толкатели 34, которые находятся во взаимодействии с симметричными зубчатыми профилями держателя 33, и Г-образные фиксаторы.
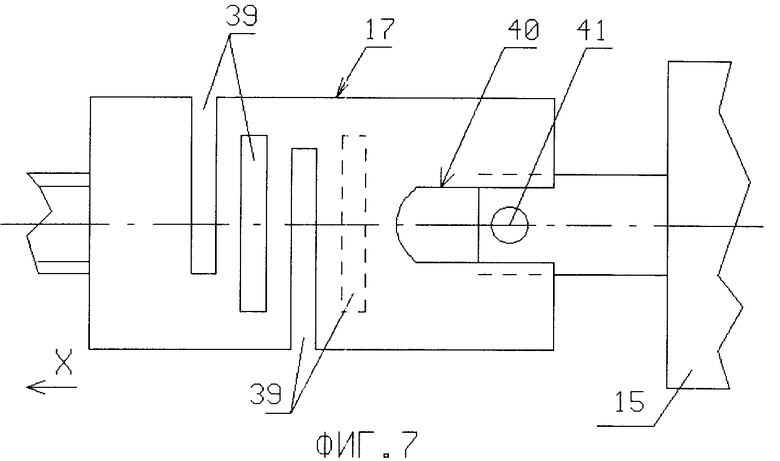
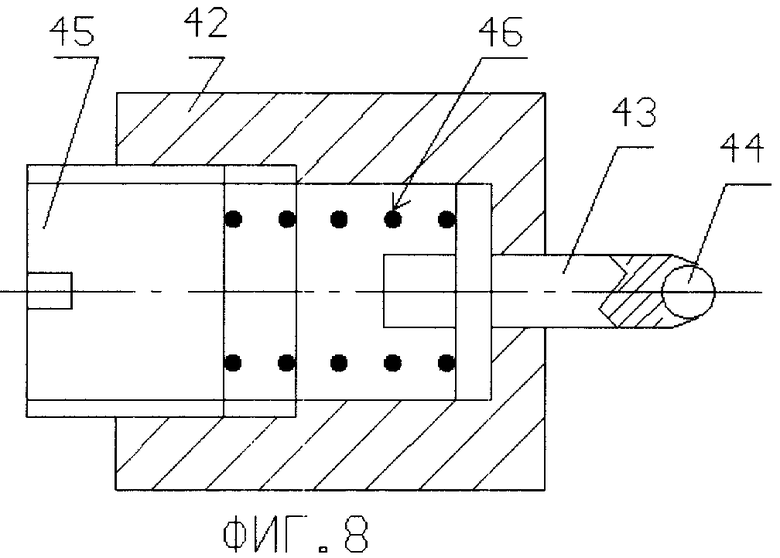
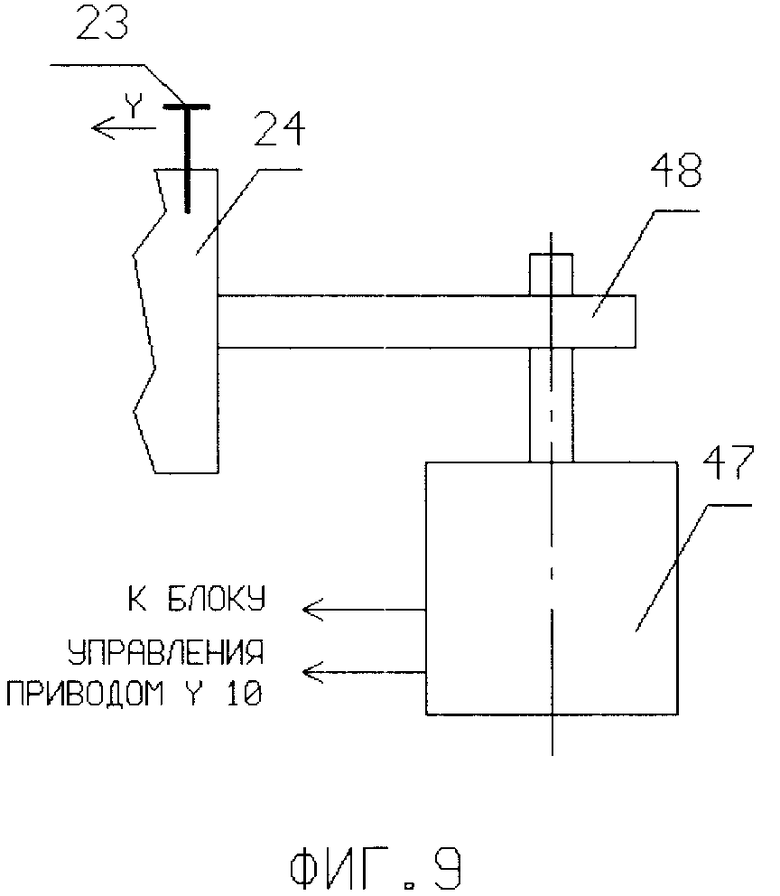
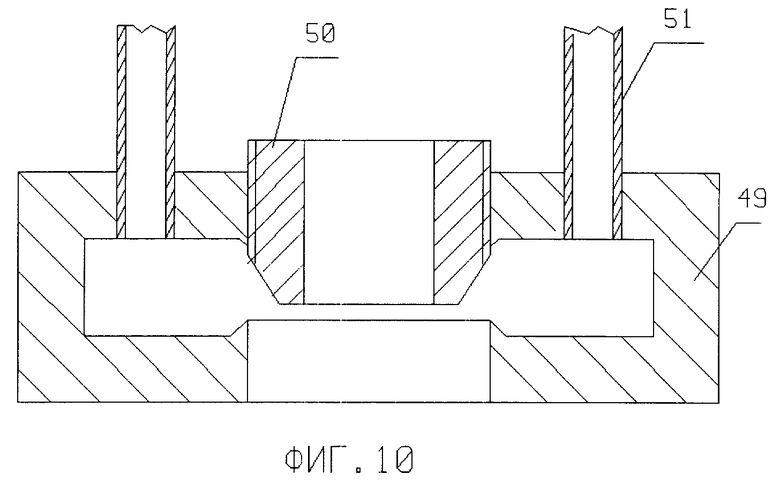
Винт-муфта 17 (фиг. 7) может быть выполнена в виде пружинной втулки с разрезами 39 по двум координатам и пазом 40, находящимся в сопряжении со штифтом 41 штока двигателя 15. Прижим 21 или 25 (фиг.8) может состоять из корпуса 42, в котором установлен шток 43 с шариком 44. Шток 43 сопряжен с регулируемой винтом 45 пружиной 46. Привод Y 27 (фиг.9) может представлять собой, например, двигатель 47 (см., например, [3]) с кулачком 48, находящимся во взаимодействии с рамкой 24. Привод Y 27 может быть также бесконтактным (см. , например, [8]). Устройство формирования потока жидкости 31 (фиг. 10) может быть выполнено в виде кольцевого инжектора 49 с подвижной шторкой 50, соединенного с трубопроводом 51.
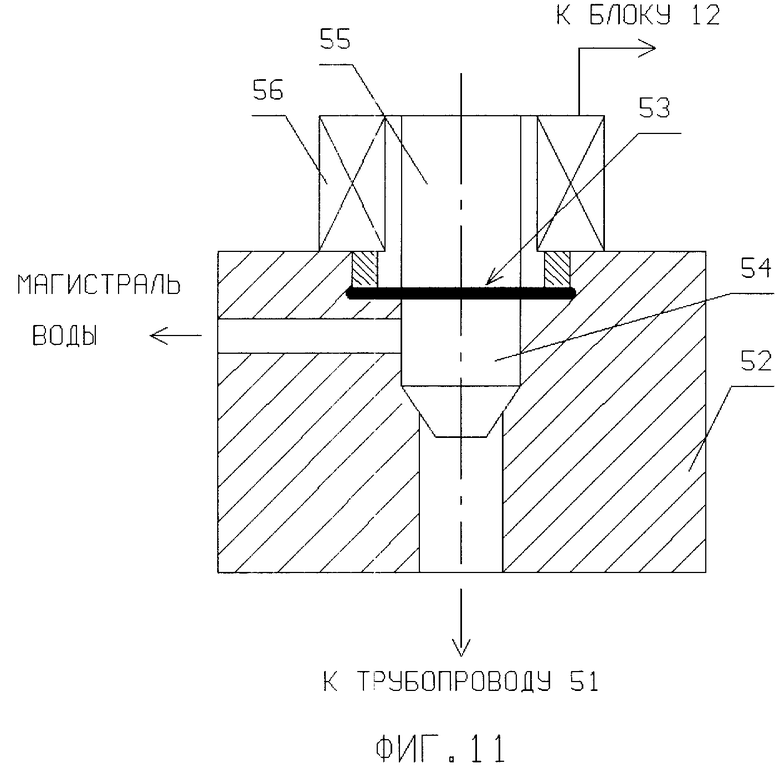
Блок включения и выключения потока жидкости (фиг.11) может быть выполнен в виде корпуса 52, в котором через упругую мембрану 53 установлена конусная пробка 54, сопряженная с сердечником 55 магнита 56.
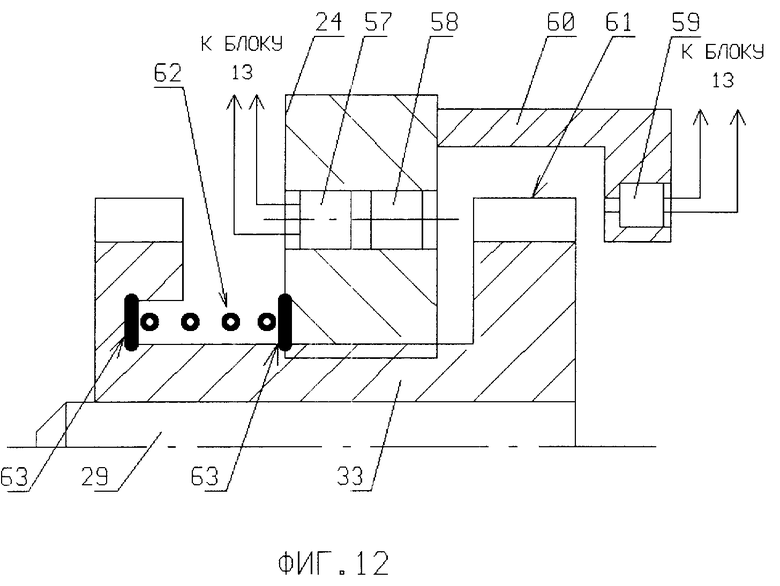
Датчик перемещения по координате Z (фиг.12) может состоять из светодиода 57 с оптическим блоком 58, установленных в рамке 24, а также фотодиода 59, закрепленного на кронштейне 60. Фотодиод 59 и светодиод 57 оптически сопряжены с зубцами 61 держателя 33. Оптический блок 58 может состоять из линз, формирующих параллельный пучок излучения, либо фокусирующих пучок в зоне перемещения зубцов 61. С целью уменьшения люфтов между держателем 33 и рамкой 24 установлена пружина 62 с фрикционными втулками 63.
Использование единого основания и компактных направляющих и приводов позволяет выполнить электромеханический блок малогабаритным с возможностью его адаптирования к различным системам и объектам измерения.
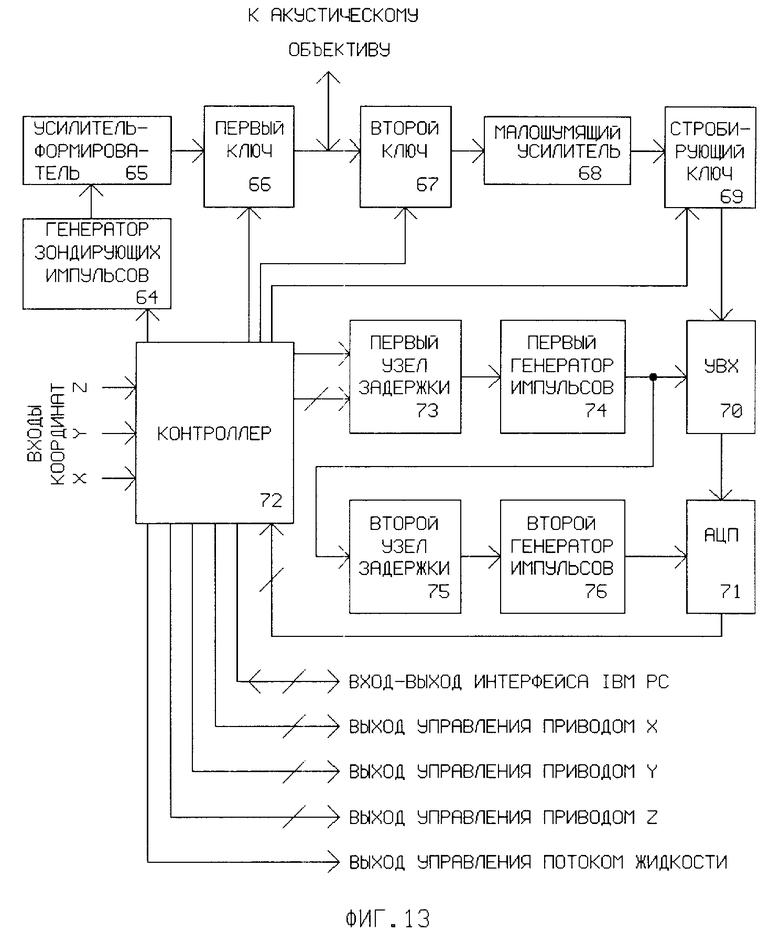
Блок управления сканированием, первичной обработки и регистрации информации (БУСПОРИ) 13 (фиг.13) состоит из генератора импульсов 64, усилителя-формирователя 65, первого и второго электронных коммутаторов (ключей) акустического объектива 66 и 67 соответственно, малошумящего усилителя 68, стробирующего ключа 69, устройства выборки-хранения (УВХ) 70, аналого-цифрового преобразователя (АЦП) 71, контроллера 72, первого узла задержки 73, первого генератора импульсов 74, второго узла задержки 75, второго генератора импульсов 76. Причем генератор импульсов 64, усилитель-формирователь 65, первый и второй ключи 66 и 67, малошумящий усилитель 68, стробирующий ключ 69, УВХ 70 и АЦП 71 соединены последовательно и при этом соединенные между собой выход первого ключа 66 и вход второго ключа 67 образуют вход/выход акустического объектива блока. Первый узел задержки 73, первый генератор импульсов 74, второй узел задержки 75, второй генератор импульсов 76 соединены последовательно, причем выходы первого и второго генераторов импульсов 74 и 76 соединены со входами управления УВХ 70 и АЦП 71 соответственно. Выход управления генератором зондирующих импульсов контроллера 72 соединен со входом управления генератора зондирующих импульсов 64, выходы управления первым, вторым и стробирующим ключами контроллера 72 соединены со входами управления соответствующих ключей, выход управления дискретизацией контроллера 72 соединен с входом сигнала первого узла задержки 73, выход задержки контроллера 72 соединен со входом управления первого узла задержки 73, вход данных контроллера 72 подключен к выходу АЦП 71, вход-выход интерфейса IВМ РС-совместимой ЭВМ, выходы управления приводами X, Y и Z, а также входы координат X, Y и Z контроллера 72 образуют одноименные вход-выход, выходы и входы БУСПОРИ 13 соответственно.
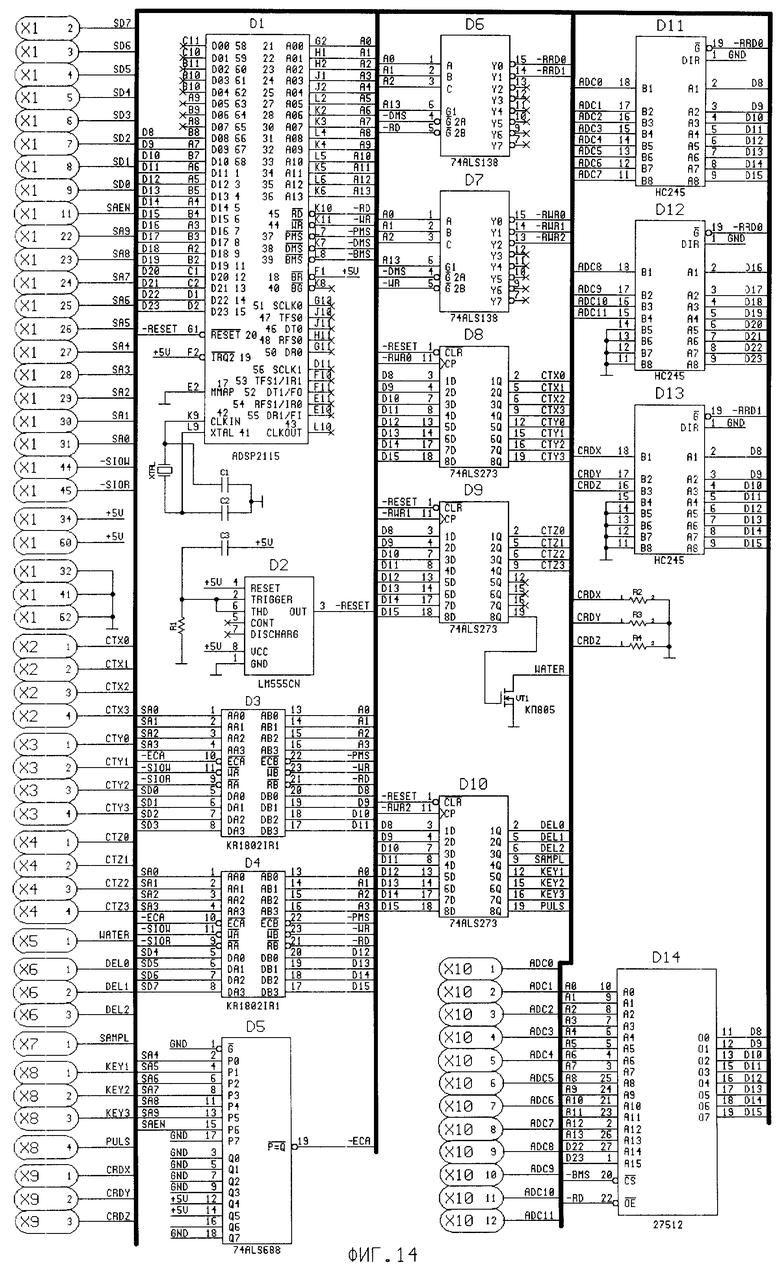
Контроллер 72 (фиг. 14) содержит процессор цифровой обработки сигналов (ПЦОС) ADSP-2115 D1, генератор сигнала начального сброса на микросхеме LM555CN (отечественный аналог - КР1006ВИ1) D2, двухпортовую память с организацией 16х8 на микросхемах двухпортовой памяти КР1802ИР1 D3 и D4 и компараторе адреса D5, формирователи стробов чтения и записи на микросхемах D6 и D7 соответственно, выходные регистры D8, D9 и D10, приемники входных сигналов на микросхемах шинных формирователей D11, D12 и D13, а также постоянное перепрограммируемое запоминающее устройство (ППЗУ) для начальной загрузки математического обеспечения 27С512 D14. Двухпортовая память контроллера 72 одновременно доступна как ПЦОС D1, так и ЭВМ, к которой подключен акустический микроскоп, и выполняет функции интерфейса между ПЦОС D1 и ЭВМ. Выходные регистры D8, D9 и D10 используются для формирования выходных сигналов управления, причем выходы 1Q, 2Q, 3Q, 4Q регистра D8 образуют выход управления приводом X, выходы 5Q, 6Q, 7Q, 8Q регистра D8 образуют выход управления приводом Y, выходы 1Q, 2Q, 3Q, 4Q регистра D9 образуют выход управления приводом Z, выходы 1Q, 2Q, 3Q регистра D10 образуют выход задержки, выход 4Q регистра D10 образует выход управления дискретизацией, выходы 5Q, 6Q, 7Q регистра D10 образуют выходы управления первым, вторым и третьим ключами соответственно, выход 8Q регистра D10 образует выход управления генератором зондирующих импульсов. Шинные формирователи D11 и D12 используются для приема данных от АЦП 71. Шинный формирователь D13 используется для приема данных отдатчиков координат, причем входы/выходы B1, B2, B3 формирователя D13 используются в качестве входов координат X, Y и Z соответственно. Дешифратор D6 формирует стробы чтения входных данных для шинных формирователей D11, D12, D13, а дешифратор D7 формирует стробы записи регистров D8, D9, D10 при обращении ПЦОС D1 к указанным регистрам. Разъемы X1 - X10 используются следующим образом. Разъем X1 служит для подключения контроллера 72 к интерфейсу ISA IBM PC - совместимой ЭВМ, Х2 - выхода управления приводом X, Х3 - выхода управления приводом Y, Х4 - выхода управления приводом Z, Х5 - выхода управления подачей жидкости, Х6 - выхода задержки, Х7 - выхода управления дискретизацией, Х8 - выходов управления ключами и генератором зондирующих импульсов, Х9 - входов координат X, Y и Z, X10 - входа данных контроллера 72.
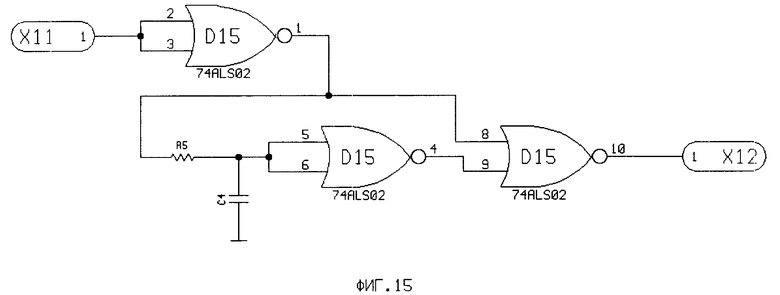
Генератор зондирующих импульсов 64, а также первый 74 и второй 76 генераторы импульсов могут быть выполнены по схеме, приведенной на фиг.15. Длительность импульсов определяется сопротивлением R5 и емкостью C4. В данном устройстве для всех генераторов она может находиться в пределах ориентировочно от десяти до ста наносекунд, при этом величины сопротивления и емкости находятся в пределах ориентировочно 100-500 Ом и 100-500 пФ (подбираются экспериментально).
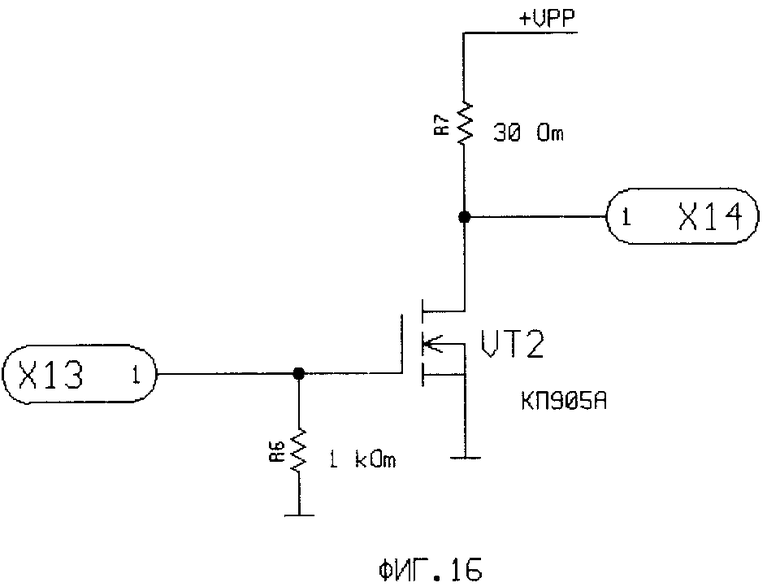
Усилитель-формирователь 65 (фиг. 16) представляет собой инвертирующий усилитель на полевом транзисторе КП907А.
Первый, второй и стробирующий ключи 66, 67 и 69 соответственно выполнены на микросхемах ADG201A (см., например, [9]), причем входы/выходы S и D образуют вход и выход ключа соответственно, а вход IN - вход управления.
Малошумящий усилитель может быть выполнен на микросхеме ОР-160, включенной по типовой схеме [10].
УВХ 70 выполнен на микросхеме AD9100, включенной по типовой схеме, приведенной в [9] , причем вход CLOCK INPUT является входом управления, а вход Vin и выход Vout являются входом и выходом данных УВХ 70.
АЦП 71 выполнен на микросхеме AD9005A, включенной по типовой схеме, приведенной в [9], причем вход ANALOG IN и выходы D0-D11 образуют вход и выход данных АЦП 71 соответственно, а вход ENCODE является входом управления АЦП 71.
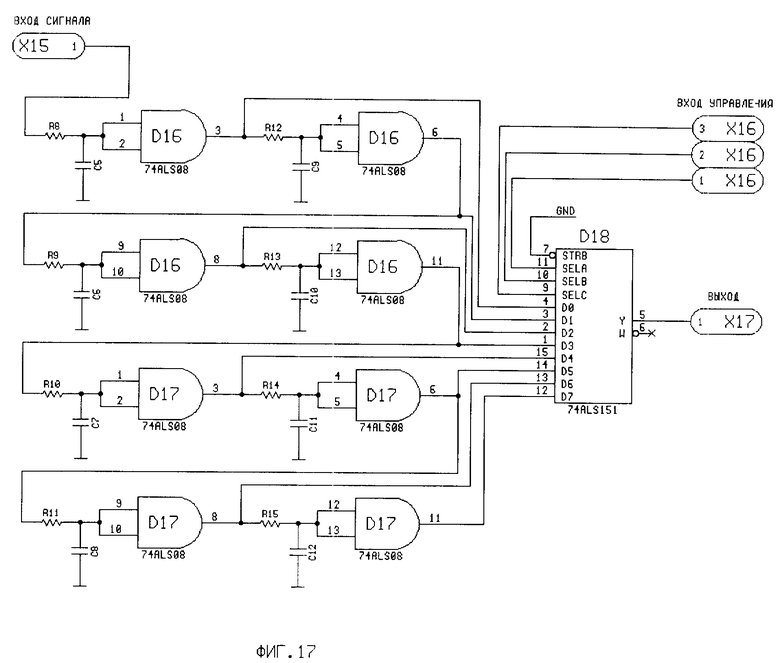
Первый узел задержки 73 (фиг.17) содержит линию задержки из восьми одинаковых секций, выполненных на элементах R8-R15, С5-С12, D16, D17. Вход этой линии (разъем X15) является входом сигнала узла. Задержка сигнала на одной секции линии задержки составляет 5-10 нс, номиналы резисторов и конденсаторов при этом составляют 50-100 Ом и 30-80 пФ соответственно (подбираются экспериментально). Узел также содержит мультиплексор D18, подключающий один из промежуточных выходов линии задержки к выходу узла. Входы номера канала мультиплексора D18 образуют вход управления узла.
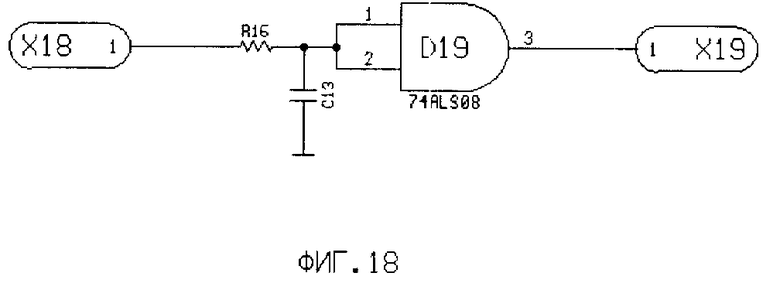
Второй узел задержки 75 может быть выполнен по схеме, приведенной на фиг.18. Величина задержки и номиналы элементов такие же, как и в первом узле задержки.
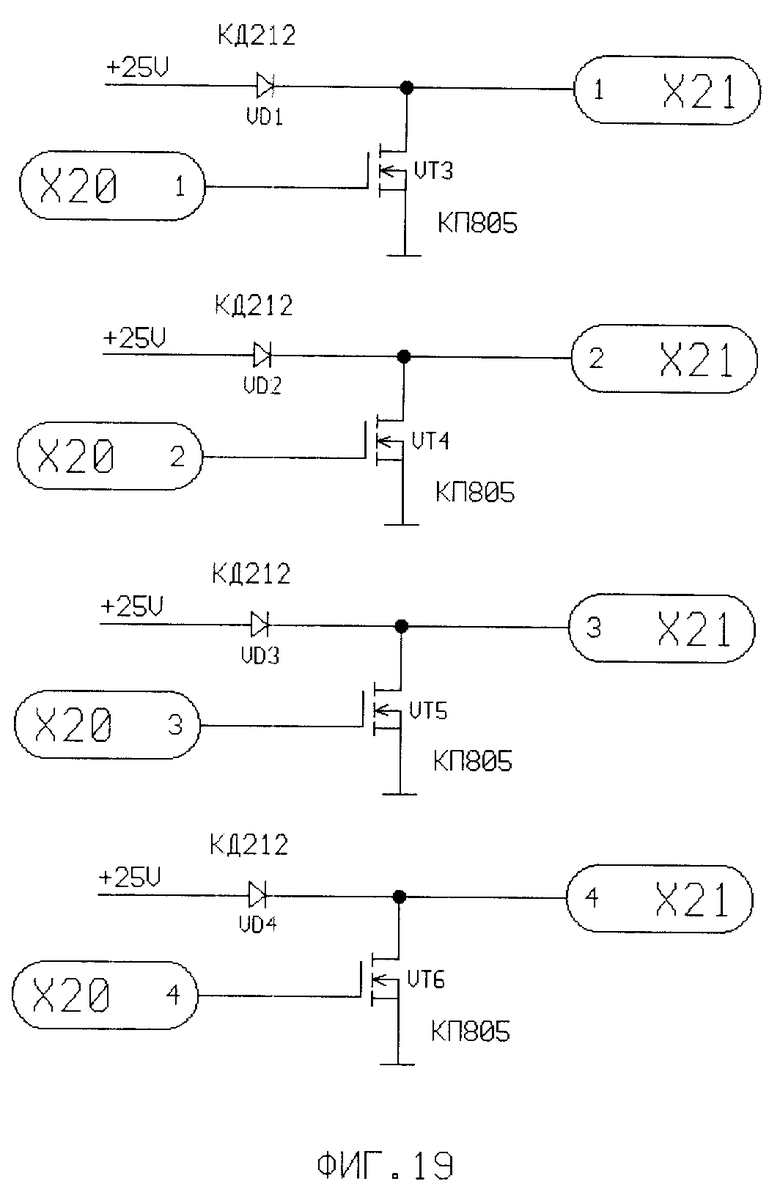
Блоки управления приводами X и Y могут быть выполнены по схеме, приведенной на фиг.19. Каждый такой блок содержит по четыре мощных ключевых усилителя на полевых транзисторах с изолированным затвором, предназначенных для подключения к потенциалу земли четырех обмоток шаговых двигателей приводов X и Y. Для блока управления приводом X контакты 1-4 входного разъема X20 подключены соответственно к контактам 1-4 разъема X2 контроллера 72, а для блока управления приводом Y они должны быть подключены соответственно к контактам 1-4 разъема X3 контроллера 72. Независимые выводы обмоток 1-4 шаговых двигателей подключают соответственно к контактам 1-4 выходного разъема X21 блока, а общий вывод всех обмоток подключают при этом к источнику питания, в данном примере +25 В.
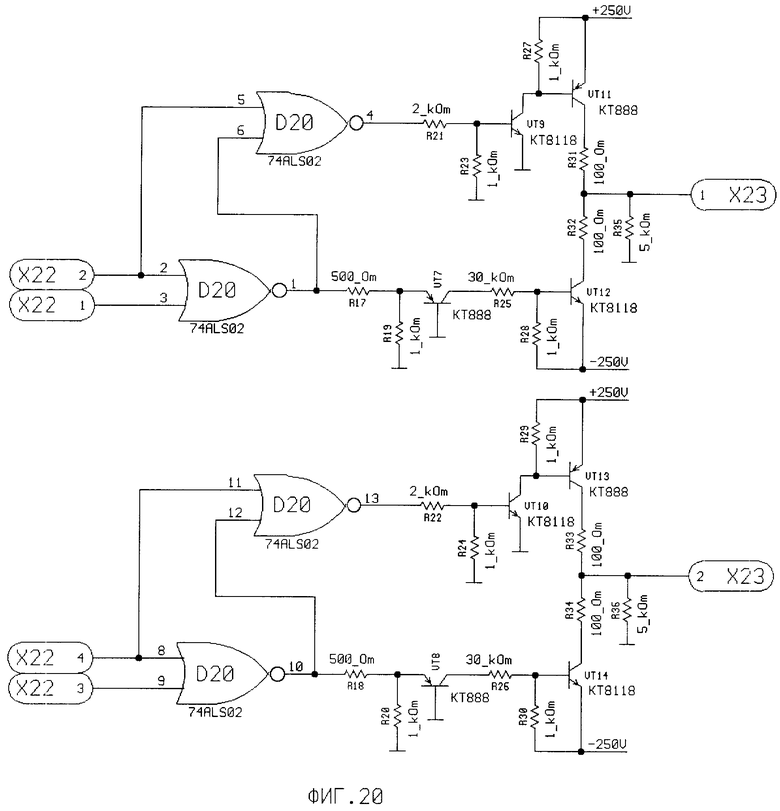
Блок управления приводом Z (фиг.20) содержит два ключевых усилителя-формирователя биполярного сигнала, на выходе которых формируется либо нулевой потенциал, либо потенциалы, близкие к напряжениям положительного или отрицательного источников питания. Контакты 1-4 входного разъема X22 блока подключены соответственно к контактам 1-4 разъема X4 контроллера 72. Контакты 1 и 2 выходного разъема X23 подключены к пъезобиморфам 36 и 37 соответственно.
Акустический микроскоп работает следующим образом. Функции управления распределены между БУСПОРИ 13 и ЭВМ, к которой подключен микроскоп, следующим образом: БУСПОРИ 13 осуществляет функции технического управления процессом сканирования объекта, регистрации принимаемого сигнала и его предварительной обработки, а ЭВМ поддерживает интерфейс оператора, формирует акустическое изображение, отображает его на экране, при необходимости записывает его на диск и таким образом предоставляет пользователю возможность любой последующей обработки акустических изображений, которая поддерживается на ЭВМ данного класса. После включения питания акустического микроскопа и ЭВМ в память ПЦОС D1 контроллера 72 и указанной ЭВМ загружается необходимое программное обеспечение. Перед началом исследования объект устанавливают в области фокуса акустического объектива 2 (фиг.1). Посредством блока 12 формируют поток жидкости между акустическим объективом 2 и объектом, после чего осуществляют сканирование объекта и регистрацию принимаемого сигнала, при этом указанный сигнал в реальном времени работы прибора передается в память ЭВМ и отображается на экране ее дисплея. После формирования изображения полностью оно может быть записано на диск. Исследование объекта можно также проводить, устанавливая акустический объектив неподвижно над заданной зоной объекта.
Рассмотрим более подробно работу акустического микроскопа.
На столе закрепляют объект и устанавливают микроскоп таким образом, чтобы акустический объектив находился над интересующим оператора участком объекта. Электромеханический блок (фиг. 2, 3) работает следующим образом. Посредством двигателя 15, передачи винт - гайка 16, муфты 17, прижима 21 и направляющих 19 платформой 20 осуществляют сканирование по координате X. Одновременно сканирование можно осуществлять по координате Y посредством привода 27 и прижима 25. Перемещение по координате Z осуществляют с помощью привода Z 28 и передачи винт - гайка (винт 33, гайка рамки 24). Датчики 22, 26 и 30 контролируют перемещение акустического объектива 29.
Привод Z (фиг. 4) работает следующим образом. На пьезобиморф 36 подают напряжение, в результате чего его конец изгибается в сторону рамки 24 и соответственно происходит перемещение конца толкателя 34, который, взаимодействуя с зубцом держателя 33, осуществляет перемещение последнего против часовой стрелки. Пьезобиморф 37 при этом находится в нейтральном положении. С целью уменьшения перекоса держателя 33 взаимодействие упругих толкателей 34 с ним осуществляют одновременно с верхней и нижней его части (см. фиг.6). Движение винта по часовой стрелке осуществляют аналогично пьезобиморфом 37.
Фиксаторы 38 могут использоваться при подаче напряжения противоположной полярности, например, на биморф 37 для фиксации держателя 33 при обратном движении противоположного пьезобиморфа 36 (в сторону от рамки) для уменьшения вероятности обратного проворота винта. Фиксаторы 38 могут также фиксировать держатель 33 при сканировании. Пьезопривод рассчитан таким образом, что в нейтральном положении пьезобиморфов толкатели 34 и фиксаторы 38 разомкнуты от держателя 33. Таким образом, благодаря резьбовому сопряжению держателя 33 с рамкой 24 происходит осевое перемещение акустического объектива 29. Длину кабелей объектива 29 выбирают в зависимости от перемещения Z с учетом их закручивания.
Пружинная муфта (фиг.7) позволяет посредством пазов 39 исключить заклинивание штифта 41 при их относительном перемещении по координате X. Шарик 44 (фиг.8), установленный с возможностью вращения, уменьшает поперечные силовые воздействия на перемещающийся объект. Кулачок 48 (фиг.9) позволяет перемещать рамку 24 с проскальзыванием в зоне контакта, а плоские пружины 23 обеспечивают линейное перемещение рамки 24. Устройство формирования потока жидкости (фиг.10) обеспечивает наличие жидкости между акустическим объективом 29 и объектом. Подвижная шторка 51 позволяет регулировать поток жидкости. Блок включения и выключения потока жидкости позволяет, изменяя посредством магнита 56 положение пробки 54, производить включение и выключение потока. Датчик перемещения по координате Z (фиг.12) фиксирует угловое перемещение держателя 33 относительно рамки 24 посредством подсчета световых импульсов фотодиодом 59 при периодическом перекрытии светового потока от светодиода 57 зубцами 61.
БУСПОРИ 13 является многофункциональным программируемым устройством, позволяющим реализовать большой набор разнообразных методик работы микроскопа. Рассмотрим вариант работы БУСПОРИ 13 с версией программного обеспечения, поддерживающей выполнение пяти основных команд: "управление потоком жидкости", "зондирование объекта", "шаг по X", "шаг по Y" и "шаг по Z". Любая методика исследования объекта, реализуемая в данном приборе, может быть представлена в виде последовательности указанных команд.
Команды поступают в контроллер 72 БУСПОРИ 13 через двухпортовую память (фиг.14, микросхемы D3 и D4) от ЭВМ. Содержимое ячеек указанной памяти имеет следующий смысл:
- байт 0 содержит код команды (устанавливается ЭВМ): 0 - нет операции, 1 - управление потоком жидкости, 2 - зондирование объекта, 3 - шаг по X, 4 - шаг по Y, 5 - шаг по Z;
- байт 1 содержит признак завершения (устанавливается ЭВМ в 0 при инициализации выполнения команды, при окончании выполнения команды ПЦОС D1 устанавливает соответствующий код): 0 - команда выполняется, 255 - команда выполнена без ошибок, 1-244 - коды ошибок;
- байты 2 и 3 содержат слово параметра команды (устанавливается ЭВМ);
- байты 4 и 5 содержат данные, возвращаемые командой "зондирование объекта" (устанавливаются ПЦОС D1).
Для инициализации команды ЭВМ помещает необходимые данные в байты 0-3 двухпортовой памяти. ПЦОС D1 в промежутках между выполнением команд в цикле опрашивает признак завершения команды. Обнаружив нуль, ПЦОС D1 считывает код команды и ее параметр и выполняет ее. После успешного или неуспешного выполнения команды ПЦОС D1 устанавливает признак завершения и возвращаемые данные, если это необходимо. ЭВМ после инициализации команды в цикле опрашивает признак завершения команды и, обнаружив ненулевое число, считывает признак завершения и данные, если они имеются. На этом выполнение команды завершается.
В команде "управление потоком жидкости" ПЦОС D1 опрашивает значение параметра (больше единицы - открыть, меньше единицы - закрыть клапан подачи жидкости) и выполняет требуемую операцию, соответственно устанавливая либо сбрасывая старший (седьмой) бит регистра D9 (фиг.14). Потенциал логической единицы открывает, а потенциал логического нуля запирает транзистор VT1, что вызывает срабатывание или отпускание электромагнита в блоке формирования потока жидкости 12, который при срабатывании открывает клапан подачи жидкости.
В команде "зондирование объекта" оборудование БУСПОРИ 13 последовательно выполняет следующие операции:
- контроллер 72 генерирует сигнал управления первым ключом 66, согласно которому ключ 66 замыкается;
- через две микросекунды, что достаточно для срабатывания первого ключа 66, контроллер 72 генерирует сигнал управления генератором зондирующих импульсов 64, согласно которому указанный генератор вырабатывает на выходе зондирующий импульс, который затем усиливается усилителем-формирователем 65 и через первый ключ 66 поступает на акустический объектив 2;
- контроллер 72 снимает сигнал управления первым ключом 66, согласно чему указанный ключ размыкается;
- через две микросекунды контроллер 72 генерирует сигнал управления вторым ключом 67, согласно которому он замыкается;
- через две микросекунды контроллер 72 генерирует сигнал управления стробирующим ключом 69, согласно которому он замыкается, причем указанная задержка необходима для отсечения коммутационной помехи второго ключа 67;
- из параметра команды (время дискретизации принятого сигнала в наносекундах, отсчитываемое от момента генерации зондирующего импульса) контроллер 72 (то есть ЦПОС D1, работающий под управлением программы) определяет число полных машинных циклов ПЦОС D1, а также величину дополнительной задержки, обеспечиваемой первым узлом задержки 73, которые должны пройти до запуска процедуры дискретизации принятого сигнала, выдает величину задержки на выход задержки и после окончания требуемого количества циклов вырабатывает сигнал управления дискретизацией;
- через время, определяемое первым узлом задержки 73, запускается первый генератор импульсов 74, сигнал которого стробирует вход УВХ 70;
- с задержкой, определяемой вторым узлом задержки и достаточной для срабатывания УВХ 70, запускается второй генератор импульсов, стробирующий вход АЦП 71;
- примерно через 200 нс после генерации сигнала управления дискретизацией, что заведомо больше, чем необходимо для выполнения процедуры дискретизации, данные с выхода АЦП 71 читаются контроллером 72 и помещаются в двухпортовую память вместе с кодом выполнения команды 255;
- на все выходы управления подаются уровни пассивных сигналов, что приводит к размыканию всех ключей и остановке всех процессов в БУСПОРИ 13.
Алгоритмы выполнения команд перемещений по всем трем координатам в общем одинаковы. Параметр команды содержит величину смещения относительно текущего положения в микронах. Контроллер 72 запускает вращение соответствующего шагового двигателя в нужном направлении и следит за изменением соответствующей координаты. При достижении требуемого перемещения двигатель останавливается и в первый байт двухпортовой памяти помещается код завершения 255. Если за время около одной секунды требуемое перемещение не было получено (достигнута граница поля сканирования), команда прерывается и формируется код завершения 1. Отслеживание изменений координат производится с помощью подсчета импульсов, генерируемых датчиками координат. Все используемые в данном устройстве датчики при перемещении на величину элемента разрешения датчика (0.3-0.8 мкм) генерируют импульс, регистрируемый ПЦОС D1, который в это время постоянно опрашивает биты 0-2 шинного формирователя D13 (входы сигналов от датчиков координат). Управление шаговыми двигателями приводов X и Y рассмотрим на примере привода X. Чтобы шаговый двигатель привода X начал вращаться, ПЦОС D1 последовательно посылает в младший полубайт регистра D8 следующие кодовые комбинации: 0011, 0110, 1100, 1001, затем снова 0011 и т. д. При этом замыкаются те транзисторные ключи, на затворах которых оказывается потенциал логической единицы, что приводит к подаче тока на обмотки 1 и 2, затем 2 и 3, затем 3 и 4, затем 4 и 1 и так далее. Чтобы шаговый двигатель начал вращаться в противоположном направлении, ПЦОС D1 генерирует обратную последовательность кодовых комбинаций: 0011, 1001, 1100, 0110, затем снова 0011 и т.д. Таким образом, обмотки двигателя будут подключаться в обратном порядке. Для запуска шагового двигателя привода Y выполняются те же операции со старшим полубайтом регистра D8. Управление приводом Z осуществляется следующим образом. Вращение против часовой стрелки осуществляется путем последовательных посылок кодовых комбинаций 1011, 1001 в младший полубайт регистра D9. При этом на контакте 2 выходного разъема X23 блока управления приводом Z 5 присутствует нулевой потенциал, а на контакте 1 - импульсы положительной полярности, заставляющие пьезобиморф 36 вращать зубчатое колесо 33. Вращение по часовой стрелке осуществляется посредством последовательных посылок кодовых комбинаций 1110, 1110 в тот же полубайт. При этом на контакте 1 выходного разъема X23 блока управления приводом Z 5 присутствует нулевой потенциал, а на контакте 2 - импульсы положительной полярности, и работает пьезобиморф 37. При окончании перемещения ПЦОС D1 посылает код 0000, что приводит к появлению отрицательного потенциала на обоих выходных контактах блока управления приводом Z 5 и фиксации координаты Z акустического объектива.
Таким образом, для реализации какой-либо методики исследования объекта на данном микроскопе ЭВМ, к которой он подключен, должна последовательно сгенерировать набор команд контроллеру 72, выполнение которых и осуществит данную методику. Рассмотрим пример работы акустического микроскопа во взаимодействии с ЭВМ. Одна из программ управления акустическим микроскопом для данной ЭВМ под названием BISCAN работает следующим образом. Программа имеет два режима работы: A-скан и C-скан, переключаемые нажатием на клавиши A и C клавиатуры ЭВМ соответственно.
В режиме A-скан (режим цифрового осциллографа) при неподвижном акустическом объективе регистрируется и отображается на экране дисплея весь участок сигнала микроскопа, в котором вероятно появление эхо-сигнала от какой-либо неоднородности структуры объекта. С этой целью программа циклически запускает команду "зондирование исследуемого объекта", последовательно перебирая значения момента дискретизации сигнала микроскопа в интервале, например, от 9 до 90 мкс с шагом 10 нс, что достаточно при работе с акустическими объективами данного микроскопа, диапазон рабочих частот которых не превышает 50 МГц. При этом ЭВМ запоминает в своей памяти все регистрируемые данные. Таким образом регистрируется весь полезный участок принимаемого микроскопом сигнала при фиксированном положении акустического объектива. Затем этот участок сигнала отображается на дисплее ЭВМ. При этом программа позволяет изменять положение акустического объектива, для чего необходимо сначала нажать на одну из клавиш X, Y или Z (выбор координаты перемещения), а затем один или несколько раз нажать на клавиши < и > (левая и правая угловые скобки). При каждом нажатии на клавиши < и > программа после завершения текущей команды "зондирование исследуемого объекта" посылает в контроллер 72 команды "шаг по X", "шаг по Y" и "шаг по Z" согласно установленной координате перемещения. Величина перемещения составляет 25 мкм по координатам X и Y и 1 мкм по координате Z. Клавише < соответствует перемещение в отрицательном направлении (вращение двигателей против часовой стрелки), а клавише > - в положительном. Таким образом, оператор может наблюдать весь отраженный объектом сигнал при различных положениях акустического объектива. Чем глубже от поверхности объекта находится неоднородность структуры, тем позже приходит отраженный ей импульс. Оператор может определить момент времени (задержку относительно зондирующего импульса), соответствующий той плоскости под поверхностью исследуемого объекта, которая содержит интересующие его элементы структуры.
В режиме C-скан осуществляется построение двумерного акустического изображения, соответствующего выбранной в режиме A-скан плоскости, находящейся внутри исследуемого объекта. После нажатия на клавишу C программа BISCAN задает вопрос оператору о величине задержки момента дискретизации сигнала относительно зондирующего импульса. После ответа оператора программа поочередно 256 раз генерирует последовательность команд "зондирование объекта" и "шаг по Y". Величина шага составляет 25 мкм, задержка, определяющая момент дискретизации и соответственно исследуемую плоскость внутри объекта, определяется ответом оператора на упомянутый запрос. Таким образом регистрируется 256-точечная строка акустического изображения. Затем генерируется команда "шаг по Y" с величиной перемещения - 256•25 = -6400 мкм, возвращающая акустический объектив к началу строки, далее генерируется команда "шаг по X" с величиной перемещения 25 мкм для перехода к новой строке. После этого вновь повторяется регистрация строки изображения и т.д. до тех пор, пока не будет просканировано 256 строк. Все полученные при этом отсчеты сигнала микроскопа запоминаются в памяти ЭВМ в виде двумерного массива, индексы которого соответствуют номерам строки и столбца квадратного растра, к которым относится данная точка. После завершения сканирования программа отображает этот массив на экране дисплея в виде двумерного полутонового изображения таким образом, чтобы максимальному сигналу соответствовала наиболее яркая точка, а наименьшему сигналу - уровень черного. Для перехода в режим A-скан или повторения всех перечисленных операций режима C-скан необходимо нажать одну из клавиш A или C соответственно.
Литература
1. Кайно Г. Акустические волны. Устройства, визуализация и аналоговая обработка сигналов. -М.: Мир, 1990, с.215-225.
2. Патент РФ N 2011194, кл. G 01 N 29/04, 1994.
З. ДШИ-200-1-2 ГОСТ 15150-69. ТУ 3.595.057.
4. Авторское свидетельство СССР N 1598357, кл. G 03 F 7/20, 1990.
5. Авторское свидетельство СССР N 1598457, кл. G 01 B 9/02, 1990.
6. Авторское свидетельство СССР N 1354978, кл. G 03 F 7/20, 1987.
7. Авторское свидетельство СССР N 1550457, кл. G 02 B 26/04, 1989.
8. Авторское свидетельство СССР N 1385843, кл. G 03 F 7/20, 1987.
9. Data converter reference manual. Volume II. Analog Devices, Inc., 1992.
10. Amplifier reference manual. Analog Devices, Inc., 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2101754C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103723C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 1996 |
|
RU2105344C1 |
| СПОСОБ ПОЛУЧЕНИЯ И ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2097940C1 |
| СПОСОБ ДИСТАНЦИОННОГО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2108617C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ОБЪЕКТ УПРАВЛЕНИЯ | 1996 |
|
RU2096821C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА ПОВЫШЕННОЙ ТОЧНОСТИ | 1998 |
|
RU2152596C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА | 1998 |
|
RU2152597C1 |
| ЭХОЛОТ | 1997 |
|
RU2123191C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
Акустический микроскоп содержит акустический объектив, установленный с возможностью перемещения по трем координатным осям, устройство формирования потока жидкости, блок управления сканированием, первичной обработки и регистрации информации, приводы для перемещения объектива, датчики перемещения и блок включения и выключения потока жидкости, в блок управления сканированием, первичной обработки и регистрации информации введены узлы задержки, электронные коммутаторы, генераторы импульсов и выполненный с возможностью сопряжения с интерфейсом совместимой электронной вычислительной машиной контроллер, предназначенный для формирования сигналов включения первого коммутатора, включения генератора зондирующих импульсов, выключения первого и включения второго коммутатора, считывания данных, команд перемещения акустического объектива с отслеживанием изменений его координат. Технический результат изобретения заключается в расширении функциональных возможностей, повышении надежности и снижении погрешности измерений. 20 ил.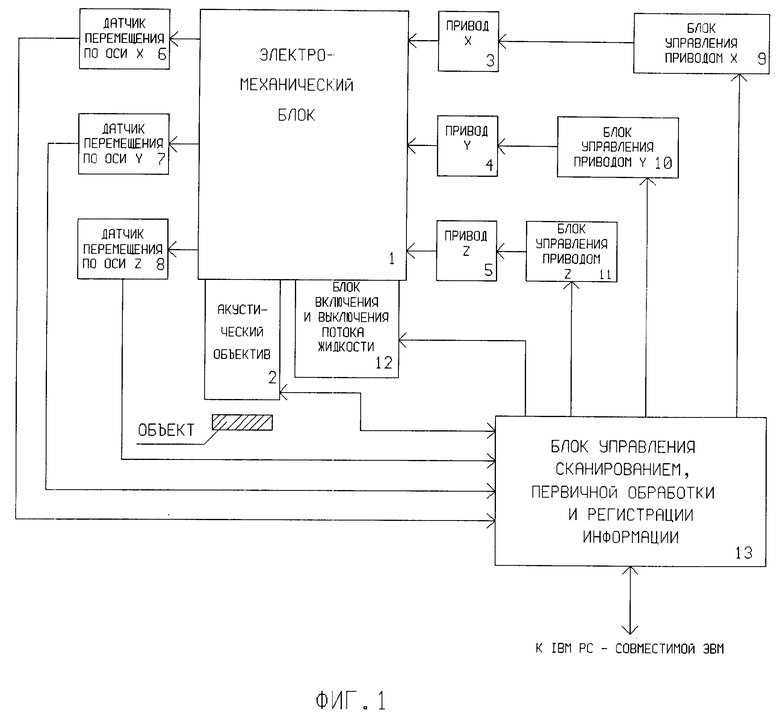
Акустический микроскоп, содержащий акустический объектив, установленный с возможностью перемещения по трем координатным осям на рамке, устройство формирования потока жидкости и блока управления сканированием, первичной обработки и регистрации информации, состоящего из усилителя-формирователя, малошумящего усилителя, стробирующего ключа, устройства выборки-хранения, аналого-цифрового преобразователя и генератора зондирующих импульсов, выход которого соединен с входом усилителя-формирователя, а малошумящий усилитель, стробирующий ключ, устройство выборки-хранения и аналого-цифровой преобразователь соединены последовательно, отличающийся тем, что в него введены независимые приводы, предназначенные для перемещения акустического объектива по координатным осям X, Y и Z, датчик перемещения по координатной оси X, датчик перемещения по координатной оси Y, датчик перемещения по координатной оси Z и блок включения и выключения потока жидкости, причем привод, предназначенный для перемещения акустического объектива по координатной оси X, закреплен на основании и сопряжен с кареткой, установленной на смонтированных на упомянутом основании первых направляющих, привод, предназначенный для перемещения акустического объектива по координатной оси Y, установлен на каретке и сопряжен с рамкой, установленной на закрепленных на каретке и выполненных в виде плоских пружин вторых направляющих, а привод, предназначенный для перемещения акустического объектива по координатной оси Z, включает в себя установленные на рамке пьезоэлементы, на которых закреплены упругие толкатели и фиксаторы, сопряженные с держателем акустического объектива, который связан посредством резьбы с упомянутой рамкой, при этом привод, предназначенный для перемещения акустического объектива по координатной оси Y, кинематически развязан с рамкой в плоскости, перпендикулярной к упомянутой координатной оси, в блок управления сканированием, первичной обработки и регистрации информации введены узлы задержки, электронные коммутаторы, генераторы импульсов и контроллер, предназначенный для формирования сигналов включения первого коммутатора, включения генератора зондирующих импульсов, выключения первого и включения второго коммутаторов, считывания данных с выхода аналого-цифрового преобразователя, команд перемещения акустического объектива с отслеживанием изменений его координат по сигналам, поступающим с выходов упомянутых датчиков перемещения, и сигналов включения и выключения потока жидкости, вход первого электронного коммутатора подключен к выходу усилителя-формирователя, а выход - к входу второго электронного коммутатора, выход которого соединен с входом малошумящего усилителя, первый узел задержки, первый генератор импульсов, второй узел задержки и второй генератор импульсов соединены последовательно, выходы первого и второго генераторов импульсов соединены соответственно с входами управления устройства выборки-хранения и аналого-цифрового преобразователя, контроллер выходом управления генератором зондирующих импульсов, выходами управления первым и вторым коммутаторами и выходом управления стробирующим ключом соединен с входами управления указанных узлов, выход контроллера, предназначенный для управления дискретизацией, соединен с входом первого узла задержки, вход управления которого соединен с выходом контроллера, предназначенным для задания величины задержки, вход данных контроллера подключен к выходу данных аналого-цифрового преобразователя при этом контролллер выполнен с возможностью сопряжения с интерфейсом IBM PC/AT - совместимой электронной вычислительной машиной и имеет выход управления приводом, предназначенным для перемещения акустического объектива по координатной оси X, выход управления приводом, предназначенным для перемещения акустического объектива по координатной оси Y, выход управления приводом, предназначенным для перемещения акустического объектива по координатной оси Z, и выход управления потоком жидкости, которыми образованы выходы блока, подключенные к указанным приводам и входу блока включения и выключения потока жидкости, а выходом первого и входом второго электронных коммутаторов образованы вход и выход блока, соединенные с входом-выходом акустического объектива.
