Изобретение относится к оборудованию, применяемому при подземном ремонте нефтяных и газовых скважин и используется для захвата колонны насосно-компрессорных труб (НКТ) и удержания их на весу в процессе спуско-подъемных операций (СПО).
Известно несколько модификаций трубных элеваторов, предназначенных для захвата колонны НКТ и удержания на весу в процессе СПО. Трубные элеваторы содержат корпус, серьгу, захват, замок и предохранитель [1, 2].
Из известных наиболее близких к заявляемому является элеватор типа ЭТА, содержащий корпус, шарнирно соединенный с серьгой, выдвижной захват для труб и поворотную рукоятку, соединенную с замковой поворотной втулкой. Предохранитель расположен в рукоятке и выполнен в виде пружинной защелки [2].
Недостатком известного элеватора является склонность его к самопроизвольному раскрытию замка, выходу захвата из корпуса и падению НКТ на рабочую площадку. Это происходит вследствие неконтролируемого износа рабочих граней замка или несрабатывания предохранительной защелки. Рабочие грани замка спрятаны в корпусе и для оценки степени их износа необходима полная разборка элеватора. Такая разборка на практике выполняется крайне редко, поэтому риск самопроизвольного раскрытия захвата со временем возрастает. Принудительный перевод предохранительной защелки в закрытое положение также является фактором риска, т.к. по разным причинам рабочий может просто не довести защелку до момента. фиксации.
Технической задачей, решаемой изобретением, является повышение надежности элеватора с точки зрения предотвращения самопроизвольного размыкания замка.
Поставленная задача решается тем, что трубный элеватор для захвата и удержания на весу колонны насосно-компрессорных труб, содержащий корпус с серьгой, поворотные сегментные захваты и рукоятку управления с фиксаторами, отличается тем, что сегментные захваты снабжены опорными кулачками, опирающимися в закрытом положении на рукоятку управления, выполненную в виде двух Г-образных шарнирно соединенных подвижных тяг, при этом рукоятка управления снабжена двумя фиксаторами, шарнирно соединенными подпружиненным рычагом коромыслового типа, а фиксаторы установлены в вертикальных глухих отверстиях корпуса с глухим дном, арсположенным над фиксаторами.
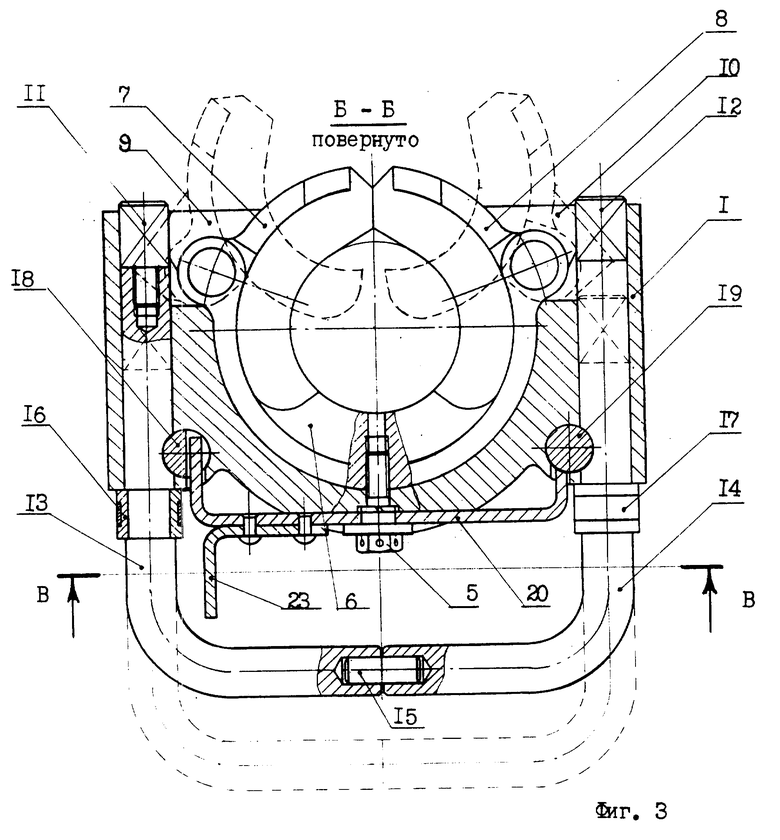
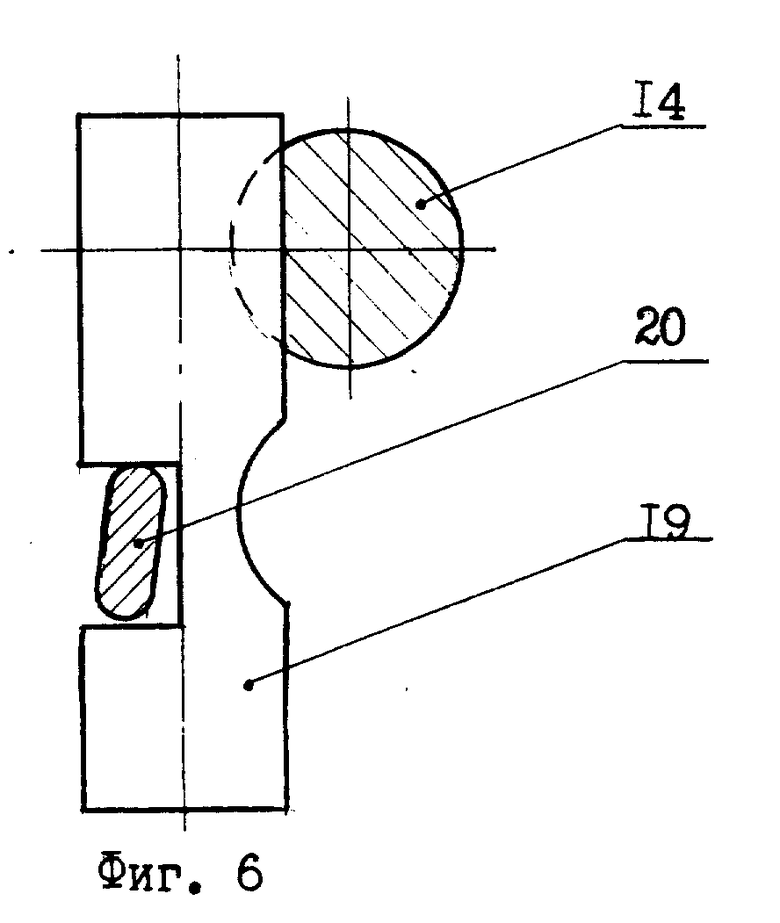
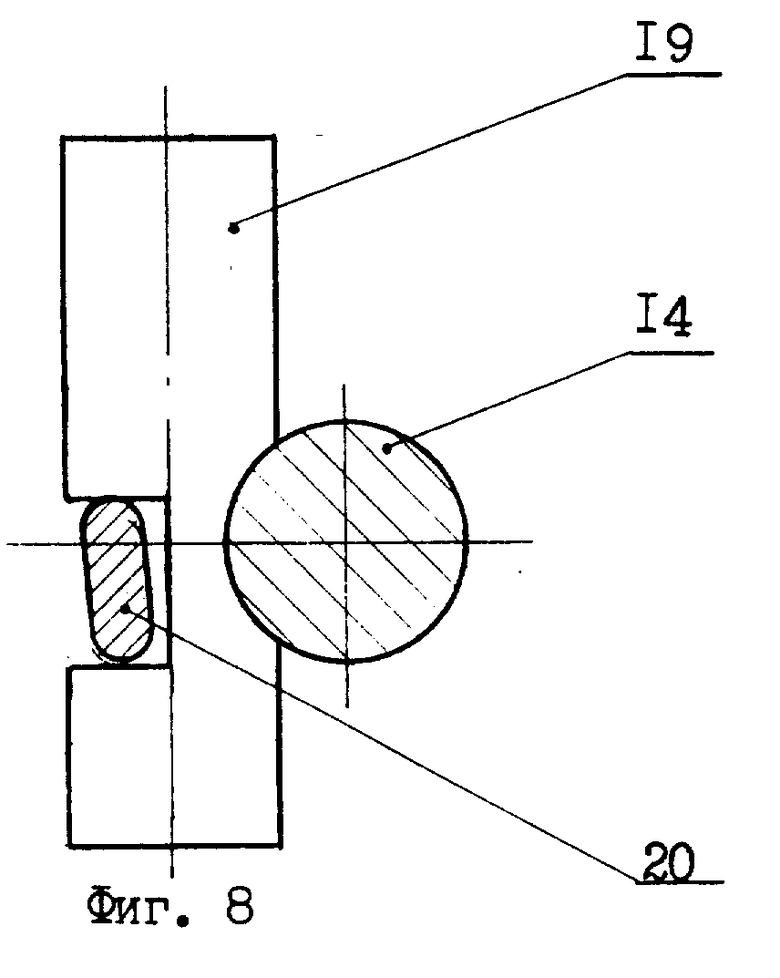
Изобретение поясняется чертежами, где изображены: на фиг. 1 - общий вид элеватора сбоку, на фиг. 2 - общий вид элеватора по стрелке А со стороны захвата, на фиг. 3 - разрез Б-Б (повернута на 90o), показана кинематическая связь между рабочими элементами элеватора, на фиг. 4 - разрез по В-В, показана кинематика управления фиксаторами, на фиг. 5 - 8 - показано взаимное расположение тяг рукоятки с фиксаторами в закрытом положении (фиг. 5 и 6) и в открытом (фиг. 7 и 8).
Элеватор содержит корпус 1, шарнирно соединенный с серьгой 2 при помощи пальцев 3 со шплинтами 4. Внутри корпуса расположен захват, выполненный в виде съемного блока, закрепляемого в корпусе при помощи винта 5. Захват содержит неподвижный грузовой сегмент 6 и два поворотных сегмента 7 и 8 для захвата труб. Сегменты 7 и 8 имеют опорные кулачки 9 и 10 для фиксации сегментов в закрытом положении. Кулачки 9 и 10 находятся в контакте с квадратами 11 и 12, которые присоединены к рукоятке, выполненной в виде двух тяг 13 и 14 кругового сечения, соединенных между собой при помощи пальца 15. Тяги 13 и 14 снабжены опорными втулками 16 и 17 соответственно. Втулки 16 и 17 ограничивают движение рукоятки внутрь корпуса 1, а квадраты 11 и 12 ограничивают движение рукоятки из корпуса 1 наружу, обеспечивая рукоятке определенную величину рабочего хода. Тяги 13 и 14 находятся в контакте с цилиндрическими фиксаторами 18 и 19, которые приводятся в движение рычагом 20 коромыслового типа, подпружиненным двумя пружинами 21 и 22. Для удобства управления рычаг 20 снабжен педалью 23.
Работает элеватор следующим образом. В исходном положении элеватор закрыт (как показано на фиг. 1 - 6). Фиксаторы 18 и 19 находятся в пазах тяг 13 и 14, надежно фиксируя последние в закрытом положении (фиг. 5 и 6). Для открытия элеватора необходимо нажатием на педаль 23 вниз повернуть рычаг 20 против часовой стрелки до упора (фиг. 3 и 4). В этот момент фиксаторы 18, 19 выходят из зацепления с тягами 13, 14, освобождая их для выдвижения из корпуса 1 (фиг. 7 и 8). Далее, не отпуская педали 23, следует потянуть тяги 13. 14 на себя до упора квадратов 11, 12 в соответствующие грани в корпусе 1 (на чертежах не показаны). Опорные кулачки 9, 10 освободятся от контакта с квадратами 11, 12 и при выходе трубы из захвата сегменты 7, 8 повернутся в открытое положение, как показано пунктирной линией на фиг. 3. При заходе очередной трубы в элеватор сегменты 7, 8 закрываются автоматически, далее перемещают тяги 13. 14 внутрь до упора втулок 16, 17 в корпус 1, квадраты 11, 12 занимают исходное положение, плотно прилегают к кулачкам 9, 10, запирая сегменты 7, 8 в закрытом положении. Далее под воздействием пружин 21, 22 рычаг 20 поворачивается по часовой стрелке до упора, перемещая фиксаторы 18, 19 в исходное положение, блокируя тяги 13, 14 от движения их из корпуса 1 (фиг. 5 и 6). Блокировка тяг 13, 14 фиксаторами 18, 19 осуществляется также автоматически.
Замена одного захвата на захват с другим типоразмером труб осуществляется при помощи винта 5.
Данный элеватор обладает простотой конструкции, автоматизмом запирания и фиксации, универсальностью по типоразмерам применяемых труб. Это обеспечивает заявляемому элеватору более высокий уровень надежности и дополнительное удобство в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕВАТОР ТРУБНЫЙ | 1998 |
|
RU2143538C1 |
| ТРУБНЫЙ ЭЛЕВАТОР | 1996 |
|
RU2107147C1 |
| ЭЛЕВАТОР ДЛЯ СПУСКА И ПОДЪЕМА БУРИЛЬНЫХ ТРУБ | 2002 |
|
RU2235846C2 |
| ЭЛЕВАТОР | 2000 |
|
RU2171351C1 |
| ЭЛЕВАТОР | 2001 |
|
RU2214498C2 |
| ЭЛЕВАТОР ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 1997 |
|
RU2128767C1 |
| УСТРОЙСТВО ГЕРМЕТИЗАЦИИ УСТЬЯ СКВАЖИНЫ | 1999 |
|
RU2160355C1 |
| АРМАТУРА-ГЕРМЕТИЗАТОР | 1998 |
|
RU2160352C2 |
| ТРУБНЫЙ ЭЛЕВАТОР ДЛЯ СТЕКЛОПЛАСТИКОВЫХ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2006 |
|
RU2324044C1 |
| ТРУБНЫЙ ЭЛЕВАТОР ДЛЯ СТЕКЛОПЛАСТИКОВЫХ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2006 |
|
RU2330153C1 |




Изобретение относится к оборудованию, применяемому при подземном ремонте нефтяных и газовых скважин, и используется для захвата колонны насосно-компрессорных труб и удержания их на весу в процессе спуско-подъемных операций. Трубный элеватор для захвата и удержания на весу колонны насосно-компрессорных труб содержит корпус с серьгой, поворотные сегментные захваты и рукоятку управления с фиксаторами. Сегментные захваты снабжены опорными кулачками, опирающимися в закрытом положении на рукоятку управления, выполненную в виде двух Г-образных шарнирно соединенных подвижных тяг. При этом рукоятка управления снабжена двумя фиксаторами, шарнирно соединенными подпружиненным рычагом коромыслового типа. Фиксаторы установлены в вертикальных глухих отверстиях корпуса с глухим дном, расположенным над фиксаторами. Использование изобретения повышает надежность элеватора с точки зрения предотвращения самопроизвольного размыкания замка. 2 з.п.ф-лы, 8 ил.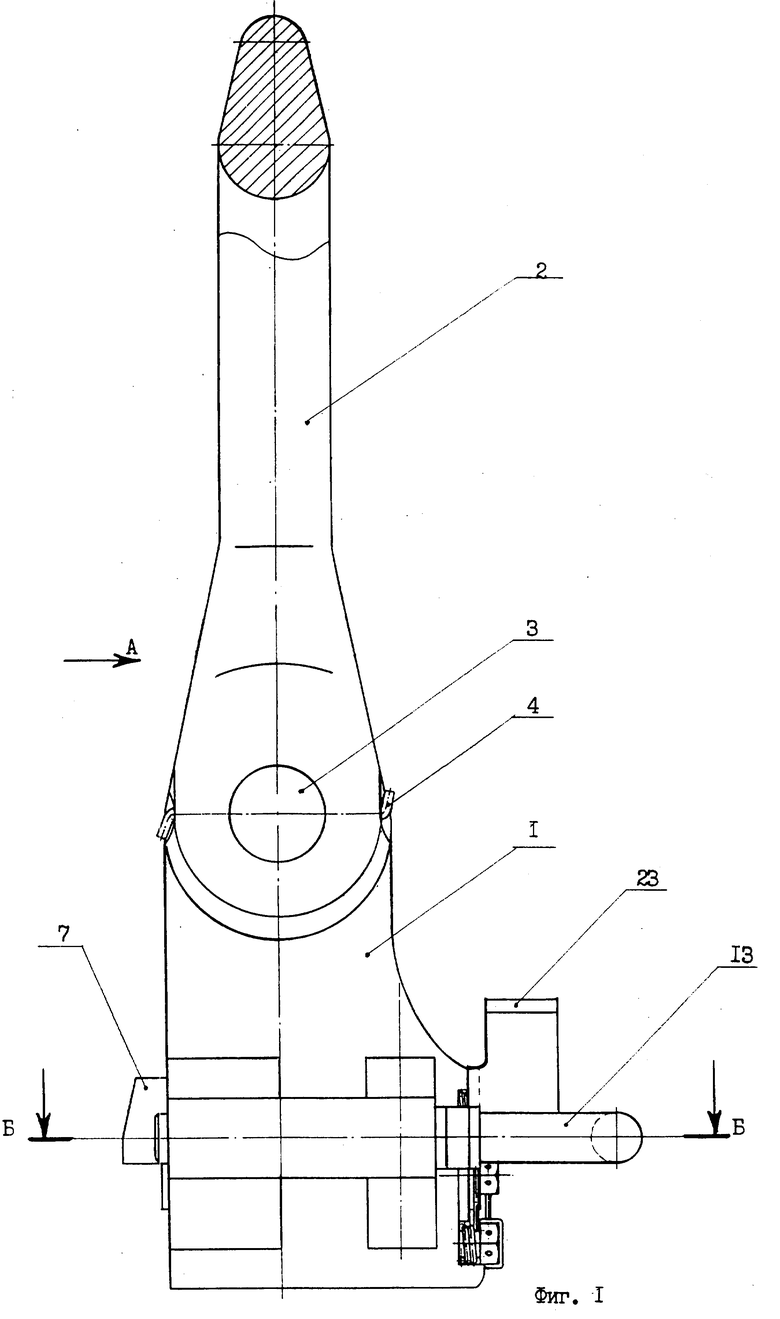
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бухаленко Е.И | |||
| и др | |||
| Оборудование и инструмент для ремонта скважин | |||
| М.: Недра, 1991 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сулейманов А.Б | |||
| и др | |||
| Техника и технология капитального ремонта скважин | |||
| М.: Недра, 1987. | |||
