Изобретение относится к оборудованию, применяемому при подземном ремонте нефтяных и газовых скважин, и используется для захвата колонны насосно-компрессорных труб (НКТ) и удержания их на весу в процессе спуско-подъемных операций.
Известен элеватор типа ЭТА, содержащий корпус, шарнирно соединенный с серьгой, выдвижной захват для труб и поворотную рукоятку, соединенную с замковой поворотной втулкой (1).
Недостатком известного элеватора является склонность его к самопроизвольному раскрытию замка, выходу захвата из корпуса и падению НКТ на рабочую площадку. Это происходит вследствие неконтролируемого износа рабочих граней замка, которые расположены внутри корпуса элеватора и для оценки степени их износа необходима полная разборка элеватора. Такая разборка на практике выполняется крайне редко, поэтому риск самопроизвольного раскрытия захвата со временем возрастает.
Известен принятый в качестве ближайшего аналога элеватор трубный для захвата и удержания на весу колонны насосно-компрессорных труб, содержащий корпус с серьгой, поворотные сегментные захваты, рукоятку управления, выполненную в виде подвижной тяги с фиксатором, выполненным в виде стержня, установленного с возможностью вертикального перемещения в закрытом положении рукоятки управления (2).
Недостатком известного элеватора является отсутствие стопорения фиксаторов от самопроизвольного их срабатывания, что снижает степень надежности закрытия захвата.
Технической задачей, решаемой изобретением, является повышение надежности элеватора за счет дополнительного стопорения фиксатора от самопроизвольного его срабатывания.
Поставленная задача решается тем, что в элеваторе трубном для захвата и удержания на весу колонны насосно-компрессорных труб, содержащем корпус с серьгой, поворотные сегментные захваты, рукоятку управления, выполненную в виде подвижной тяги с фиксатором, выполненным в виде стержня, установленного с возможностью вертикального перемещения в закрытом положении рукоятки управления, согласно изобретению, рукоятка управления выполнена П-образной, поворотные сегментные захваты имеют опорные кулачки, опирающиеся в закрытом положении на рукоятку управления, а стержень фиксатора выполнен поворотным и находится в пазу корпуса в застопоренном от вращения положении.
Изобретение поясняется чертежами, где изображены:
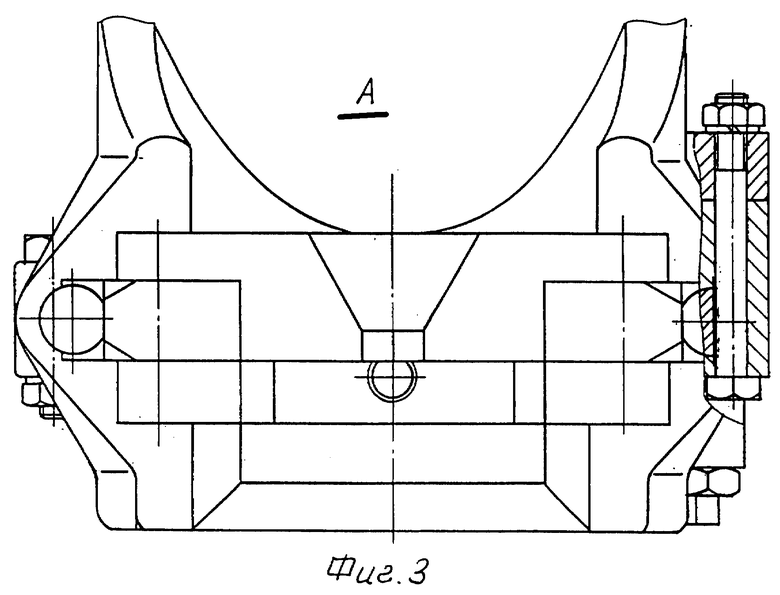
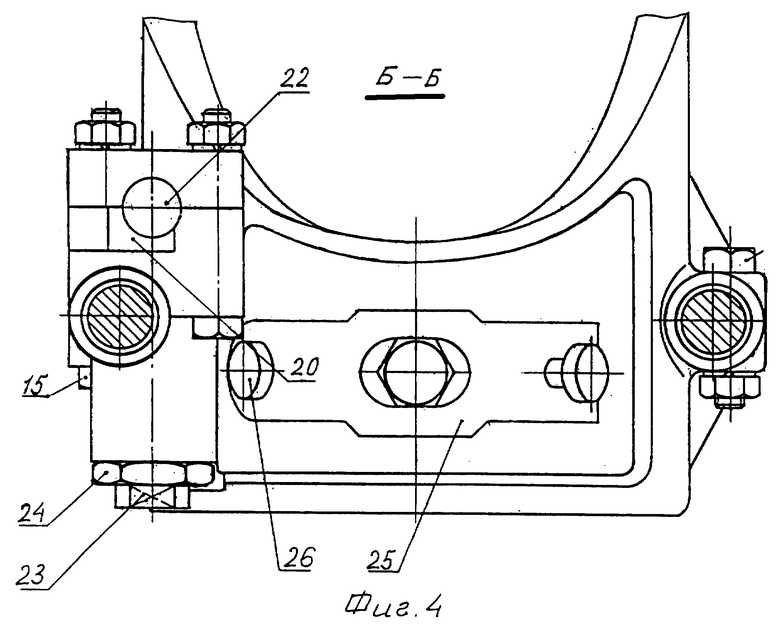
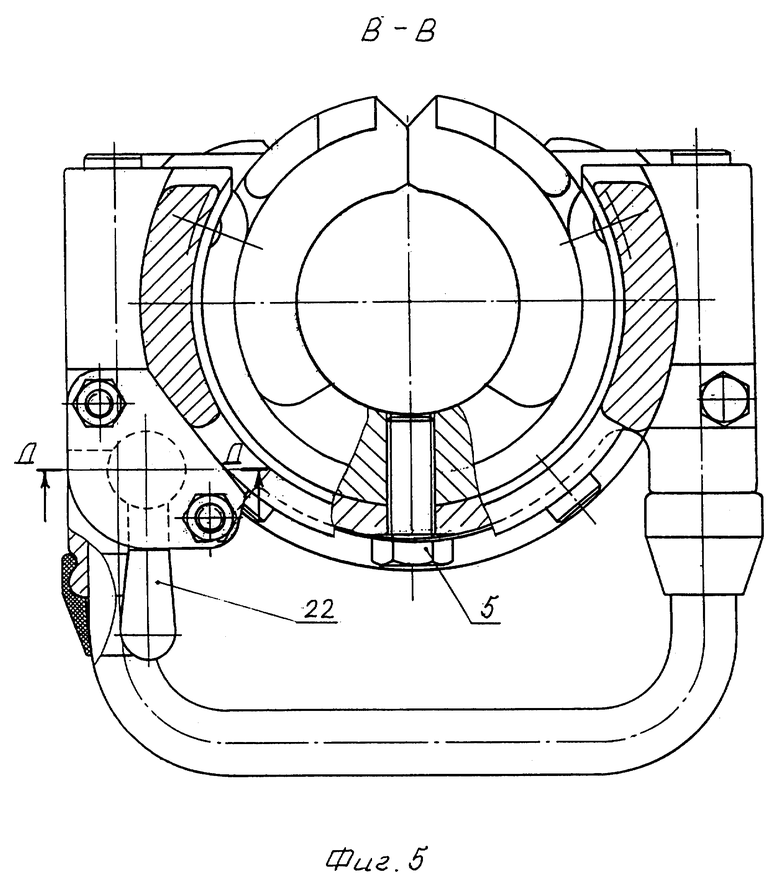
на фиг. 1 - общий вид элеватора сбоку, на фиг. 2 - фиксатор в разрезе по сечению Д-Д на фиг. 5 в открытом положении, на фиг. 3 - фронтальный вид А на захват, на фиг. 4 - вид сзади по сечению Б-Б на фиг. 1, на фиг. 5 - вид сверху по сечению В-В на фиг. 1, на фиг. 6 - вид сверху по сечению Г-Г на фиг. 1, пунктирной линией показаны рукоятка и захват в открытом положении.
Элеватор содержит корпус 1, шарнирно соединенный с серьгой 2 при помощи пальцев 3 со шплинтами 4. Внутри корпуса расположен захват, выполненный в виде съемного блока, закрепленного в корпусе при помощи винта 5. Захват содержит неподвижный грузовой сегмент 6 и два поворотных сегмента 7,8 для захвата труб. Сегменты 7,8 имеют опорные кулачки 9, 10 для фиксации их в закрытом положении. Кулачки 9 и 10 находятся в контакте с лысками 11, 12, выполненными на концах П-образной рукоятки 13. Рукоятка 13 имеет возможность продольного перемещения, ограниченного упорами 14, 15 и пазами 16, 17. Для защиты от грязи рукоятка 13 снабжена эластичными манжетами 18, 19. Фиксатор выполнен в виде поворотного стержня 20, подпружиненного пружиной сжатая-вращения 21 и приводимого в действие рычагом 22. Усилие сжатия и момент закручивания пружины 21 осуществляется при помощи гайки 23 и контргайки 24. Стопорение винта 5 осуществлено пружинной пластиной 25, шарнирно закрепленной на корпусе 1 при помощи пальца 26.
Работает элеватор следующим образом.
В исходном положении элеватор закрыт (фиг. 5). Поворотные сегменты 7,8 сомкнуты в кольцо и зафиксированы рукояткой 13, вдвинутой в корпус 1. Сама рукоятка 13 зафиксирована поворотным стержнем 20, рычаг 22 которой поднят усилием пружины 21 в крайнее верхнее положение и удерживается в пазу корпуса 1, препятствуя вращению. Таким образом, стержень 20 также находится в зафиксированном положении, обеспечивая захвату дополнительную фиксацию, т.е. третью ступень блокировки.
Для перевода элеватора в рабочее положение необходимо опустить стержень 20 вниз до упора, повернуть его на 90 градусов по часовой стрелке также до упора и, удерживая стержень 20, вытянуть рукоятку 13 из корпуса 1 до упоров 14, 15. Сегменты 7,8 разводят на требуемую величину и подводят захват к НКТ. Теперь для захвата трубы достаточно элеватор перемещать к трубе до полного смыкания сегментов 7,8. Далее перемещают рукоятку 13 внутрь корпуса 1 до упоров 14,15, блокируя сегменты 7,8 в закрытом положении. Стержень 20 под воздействием пружины 21 поворачивается в исходное положение; блокируя рукоятку 13 в закрытом положении. Рычаг 22 под воздействием пружины 21 поднимется вверх по пазу корпуса 1 и блокирует стержень 20 в закрытом положении. Сегменты 7,8 оказываются последовательно заблокированными тремя элементами: рукояткой 13, стержнем 20 и рычагом 22.
Для освобождения трубы от элеватора действуют в обратной последовательности. При этом сегменты 7,8 разводятся автоматически при выводе трубы из зоны захвата.
Заявляемый элеватор обладает более высоким уровнем надежности благодаря применению трехступенчатой системы блокировки. Удобное расположение рабочих органов и элементов блокировки обеспечивает возможность визуального контроля за их состоянием в процессе эксплуатации элеватора, что позволяет в свою очередь своевременно обнаружить дефекты и принять необходимые меры по недопущению аварийного падения НКТ.
Источники информации:
1. Сулейманов А.Б., Карапетов К.А., Яшин А.С. Техника и технология капитального ремонта скважин. -М.: Недра, 1987,
2. Патент РФ N 2099503, E 21 B 19/06, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБНЫЙ ЭЛЕВАТОР | 1996 |
|
RU2107146C1 |
| ТРУБНЫЙ ЭЛЕВАТОР | 1996 |
|
RU2107147C1 |
| ЭЛЕВАТОР | 2000 |
|
RU2171351C1 |
| ЭЛЕВАТОР | 2001 |
|
RU2214498C2 |
| АРМАТУРА-ГЕРМЕТИЗАТОР | 1998 |
|
RU2160352C2 |
| ЭЛЕВАТОР ДЛЯ СПУСКА И ПОДЪЕМА БУРИЛЬНЫХ ТРУБ | 2002 |
|
RU2235846C2 |
| АРМАТУРА-ГЕРМЕТИЗАТОР (ВАРИАНТЫ) | 1998 |
|
RU2143052C1 |
| ТРУБНЫЙ ЭЛЕВАТОР ДЛЯ СТЕКЛОПЛАСТИКОВЫХ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2006 |
|
RU2324044C1 |
| ТРУБНЫЙ ЭЛЕВАТОР ДЛЯ СТЕКЛОПЛАСТИКОВЫХ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2006 |
|
RU2330153C1 |
| ЭЛЕВАТОР УНИВЕРСАЛЬНЫЙ | 2009 |
|
RU2507368C2 |


Изобретение относится к оборудованию, применяемому при подземном ремонте нефтяных и газовых скважин, и используется для захвата колонны насосно-компрессорных труб (НКТ) и удержания их на весу в процессе спуско-подъемных операций. Элеватор трубный для захвата и удержания на весу колонны НКТ содержит корпус с серьгой, поворотные сегментные захваты с опорными кулачками, опирающимися в закрытом положении на рукоятку управления, выполненную П-образной в виде подвижной тяги. Фиксаторы опорных кулачков выполнены в виде поворотного стержня с возможностью вертикального перемещения в закрытом положении рукоятки управления. Фиксатор находится в пазу корпуса в застопоренном от вращения положении. Элеватор обладает более высоким уровнем надежности благодаря применению трехступенчатой системы блокировки. Удобное расположение рабочих органов и элементов блокировки обеспечивает возможность визуального контроля за их состоянием в процессе эксплуатации элеватора, что позволяет своевременно обнаружить дефекты и принять необходимые меры по недопущению аварийного падения НКТ. Повышается надежность элеватора за счет дополнительного стопорения фиксатора от самопроизвольного его срабатывания. 6 ил.
Элеватор трубный для захвата и удержания на весу колонны насосно-компрессорных труб, содержащий корпус с серьгой, поворотные сегментные захваты, рукоятку управления, выполненную в виде подвижной тяги с фиксатором, выполненным в виде стержня, установленного с возможностью вертикального перемещения в закрытом положении рукоятки управления, отличающийся тем, что рукоятка управления выполнена П-образной, поворотные сегментные захваты имеют опорные кулачки, опирающиеся в закрытом положении на рукоятку управления, стержень фиксатора выполнен поворотным и находится в пазу корпуса в застопоренном от вращения положении.
| ЭЛЕВАТОР ДЛЯ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 1996 |
|
RU2099503C1 |
| Элеватор | 1982 |
|
SU1040113A1 |
| ТРУБНЫЙ ЭЛЕВАТОР | 1996 |
|
RU2107146C1 |
| Молчанов А.Г | |||
| Подземный ремонт скважины | |||
| - М.: Недра, 1986, с.61 и 62. | |||

