Изобретение в общем относится к системам мобильной сотовой телефонной связи (включая как аналоговые, так и цифровые сотовые системы), в частности к системе автоматического определения местоположения мобильных сотовых телефонов, действующих в пределах заданного географического района.
До создания настоящего изобретения не были известны системы автоматического слежения за мобильными сотовыми телефонами. Уже многие годы широко используются такие известные технологии, как радионавигация, в том числе радиопеленгация, дальняя навигация (система ЛОРАН), устройства аварийного определения местоположения для самолетов, системы наблюдения и сопровождения спутников и т.п., однако ни одна из подобных систем не применялась для автоматического определения местоположения сотовых телефонов, как это описывается здесь. Соответственно информация о предпосылках изобретения, которая в наибольшей степени уместна для понимания данного изобретения, относится к самой системе сотовой телефонной связи, а не к смежным областям радионавигации и пеленгации.
Известна система сотовой телефонной связи описана ниже со ссылками на фиг. 1A-1C. При этом следует отметить, что раскрываемые здесь принципы изобретения применимы как к аналоговым, так и к цифровым сотовым системам (например, к системе многостанционного доступа с временным разделением каналов), в которых используются аналоговые каналы управления.
Сотовые телефонные системы, как правило, включают в себя несколько сотовых станций и размещенный центрально сотовый коммутатор, называемый мобильным телефонным коммутатором (МТК). Обычно имеется от шестидесяти до ста сотовых станций в больших городах и от пятнадцати до тридцати - в менее крупных городах. Сотовые станции обычно размещаются с интервалами от половины до двадцати миль (0,926 - 37,040 км). Каждая сотовая станция обычно содержит одну или несколько антенн, установленных на треугольной платформе. Платформа помещается на вышке или на высоком здании, высота которых предпочтительно должна быть от пятидесяти до трехсот футов (15,24 - 91,44 м) над уровнем окружающей местности.
Основная идея, используемая в сотовой системе, - многократное использование частот. Эта концепция многократного использования частот реализуется схемой перекрывающихся сот, которые концептуально рассматриваются как шестиугольники. Эта концепция проиллюстрирована на фиг. 1A, на которой изображена схема сотовой системы, использующей семь отличных друг от друга наборов частот. На этой фигуре каждая заштрихованная часть представляет собой отдельный набор частот. Фиг. 1C схематически изображает основные компоненты и структуру системы сотовой телефонной связи. Как указано выше, многократное использование частот дает возможность сотовой системе использовать ограниченное число радиоканалов, чтобы обслуживать многих пользователей. Например, на фиг.1A показан участок, обслуживаемый 14 сотами, которые разделены на две группы. Каждая группа имеет сеть сотов. Каждому соту в группе присвоен отдельный набор каналов. Однако используемые в одной группе наборы повторно присваиваются другой группе, тем самым представленный в распоряжение частотный спектр используется многократно. Сигналы, исходящие из сота в каналах, присвоенных этому соту, достаточно мощные для обеспечения формирования полезного сигнала для мобильного сотового телефона, находящегося в данном соте, но недостаточно мощные для того, чтобы создавать помехи для сигналов других сотов в том же канале. Все сотовые телефоны могут настроиться на любой из этих каналов.
Федеральная комиссия по связи выделяла для использования в сотовых системах спектр шириной 25 МГц. Этот спектр делится на два диапазона по 12,5 МГц, один из которых предназначен только для проводных коммерческих сетей связи, а другой - только для беспроводных коммерческих сетей связи. В любой данной системе беспроводное обслуживание линии действует в "полосе А" спектра, а проводное - в "полосе B". Ширина сотовых каналов - 30 МГц и они включают в себя каналы управления и каналы речевых сигналов. В частности, двадцать один канал управления для систем "A" пронумерован от 313 до 333 и занимает диапазон частот в 30 кГц от 834,390 до 834,990 МГц. Каналы управления для систем "B" пронумерованы от 334 до 354 и занимают частоты от 835,020 до 835,620 МГц. Каждая сотовая станция (или, если сотовая станция согласно нижеследующему описанию подразделена на сектора, то каждый сектор этой сотовой станции) использует только один канал управления. Канал управления от сотовой станции до мобильного аппарата называется "прямым" каналом управления, а канал управления от сотового телефона к сотовому объекту называется "обратным" каналом управления. Сигналы непрерывно передаются каждой сотовой станцией по прямому каналу управления. В противоположность этому сигналы прерывисто (периодически) передаются сотовыми телефонами по обратному каналу управления. Если сотовые станции настолько близки друг к другу, что каналы управления, использующие одну и ту же частоту, создают друг другу помехи, канал управления на каждой сотовой станции, кроме этого, обозначается цифровым цветовым кодом: от нуля до трех. Это обеспечивает однозначную идентификацию каждого сотового объекта, например, в пределах от двадцати до тридцати миль (37,04 - 55,56 км).
Направленные антенны сотовой станции могут быть использованы для снижения внутриканальных помех и помех по соседнему каналу. Фиг.18 иллюстрирует, как секторные антенны могут быть использованы для уменьшения этих помех. Кружками обозначены сотовые станции, а пунктирными линиями - азимутальные кромки передних лепестков направленных антенн в секторе 120o. Символы "A", "B" и "C" относятся одновременно к наборам каналов, сотам и сотовым станциям. Символы "1", "2" и "3" относятся одновременно к направленным антеннам и секторам сотов. Так, например, если конкретный канал назначен сектору 1 сота B, а соседние каналы назначены сотам A и C, то эти соседние каналы должны быть назначены сектору 1 в сотах A и C.
Когда сотовый телефон включается в первый раз, он сканирует все прямые каналы управления, отыскивая канал с самым сильным сигналом. Телефон затем выбирает прямой канал управления с самым сильным сигналом и принимает общие сообщения системы, которые передаются периодически, например, каждые 0,8 с. Эти общие сообщения содержат информацию о параметрах доступа в сотовую систему. Одним из этих параметров является частота регистрации, которая определяет, как часто данный телефон должен информировать систему о своем нахождении в географических пределах системы. Частоты регистрации обычно находятся в пределах от одного раза в минуту до одного раза в тридцать минут.
Общие сообщения также содержат биты "занято"/"свободно", которые представляют информацию о доступности в данное время обратного канала управления для данного сота. Когда обратный канал управления освобождается, что индицируется битом "занято"/"свободно", сотовый телефон начинает себя регистрировать, используя обратный канал управления. Сотовые телефоны регистрируют себя с частотой, определяемой сотовой системой. Требования к параметрам регистрации определяются каждой сотовой системой. Например, возможные варианты включают: 1) 7-цифровой NXX-XXXX, 2) 3-цифровой NPA и 3) 32-битовый электронный серийный номер. Каждый из этих вариантов представляет собой цифровое слово. Вследствие наличия битов цикловой синхронизации и использования методов исправления ошибок каждое цифровое слово имеет длину в 240 битов. Вместе с первоначальным потоком из 48 битов цикловой синхронизации каждая передача по сотовому телефону имеет минимальную длину в 288 битов и достигает 1488 битов. Помимо этого, каждая прерывистая передача осуществляется сотовым телефоном, включает в себя интервал немодулированной несущей. Поэтому средняя передача в обратном канале управления имеет длительность около 100 млс. Сотовые телефоны также передают сообщения в ответ на поисковые вызовы сотовой системы и в ответ на вызовы самих пользователей. Термин "поисковый вызов" используется для описания процесса определения доступности мобильного телефона для приема поступающего вызова. Дополнительная функция инициирования вызова мобильным телефоном определяется как "доступ". Функции поискового вызова и доступа осуществляются в каналах управления.
Находясь во включенном состоянии, но не в работе, мобильный сотовый телефон периодически сканирует присвоенные системе каналы управления и выделяет для использования самый сильный сигнал из найденных несущих. Когда мобильное приемное устройство настроится на эту самую сильную несущую, сотовый телефон непрерывно декодирует поток цифровых модулирующих данных, отыскивая поступающие вызовы. Любой вызов, поступающий на мобильный терминал, инициируется как обычный телефонный вызов. Набирается семи- или десятицифровой номер, и телефонная сеть направляет вызов на центральный компьютер. Номер передается по каналам управления каждого сота в системе. Когда вызываемый телефон обнаруживает свой номер в потоке поступающих данных, он отправляет свою идентификацию обратно в систему. Система использует цифровое сообщение в канале управления для выделения этому телефону канала для пользования. Телефон настраивается на этот канал и затем пользователю дается сигнал о поступающем вызове. Аналогичная последовательность имеет место, когда вызов делает пользователь сотового телефона. Пользователь набирает нужный телефонный номер в регистре телефона. Этот номер передается по каналу управления ближайшему соту (т.е. соту с самой сильной несущей). Затем компьютер системы предоставляет канал для вызова, а мобильный аппарат автоматически настраивается на этот канал.
За сравнительно короткий период своего существования сотовая связь завоевала большой успех. Новые абоненты, осознавая преимущества предоставляемой им возможности делать и принимать вызовы, находясь вне дома, пополняют ряды пользователей все в больших количествах. Во многих городах имеет место сильная конкуренция между A- и B-диапазонами при привлечении новых абонентов. Соответственно есть большая потребность в новых услугах, которые можно было бы предложить имеющимся и потенциальным абонентам. Настоящее изобретение было создано в результате осознания того обстоятельства, что подвижность, являющаяся главным преимуществом сотовой системы, в определенных обстоятельствах является одновременно и недостатком. Например, потерянный или похищенный сотовый телефон трудно восстановить. Поэтому пользователям очень пригодилась бы система, которая могла автоматически определять местоположение телефона. Кроме этого, если сотовый телефон был бы в автомобиле, а автомобиль был бы угнан, ценную услугу пользователям оказала бы система, которая, обеспечив определение местоположения телефона, также могла бы определить местонахождение автомобиля. Кроме того, возможны ситуации, когда пользователь сотового телефона может заблудиться, например, если пользователь едет по незнакомой местности ночью с телефоном в машине. Опять же большим преимуществом системы была бы ее способность автоматически определить местоположение телефона и по запросу сообщать пользователю его (пользователя) местонахождение. Аналогичным же образом пользователь сотового телефона, которому нужна неотложная медицинская помощь и который набирает экстренный телефонный номер (например, 911), возможно, не сможет сказать диспетчеру, где он находится. Системы, известные из предшествующего уровня техники, не в состоянии проследить, откуда поступил вызов по сотовому телефону. Поэтому в таких обстоятельствах пользователь сотового телефона окажется в очень трудном положении. Опять же было бы весьма полезным, если бы система могла определять местонахождение пользователя и предоставлять информацию персоналу неотложной медицинской помощи. Имеется еще множество других случаев применения для системы, обеспечивающей возможность автоматического определения местоположения сотового телефона.
В соответствии с изобретением заявлена система определения местоположения сотового телефона, предназначенная для определения местонахождения многих мобильных сотовых телефонов, каждый из которых сам периодически передает сигналы по одному из каналов из числа присвоенного набора каналов управления. Изобретение может быть осуществлено в системе, которая использует значительную часть существующей инфраструктуры сотовой системы. Например, как это описано подробнее ниже, система определения местоположения сотового телефона согласно данному изобретению может использовать вышки системы сотовой связи и помещения сотовых станций. В этом смысле система определения местоположения сотового телефона может быть наложена на сотовую систему.
Мониторинг каналов управления обеспечивает многочисленные преимущества для слежения за местонахождением сотовых телефонов. Во-первых, канал тональной частоты - это дорогой и дефицитный ресурс. Обычно для сотовых систем требуются примерно от шести до восьми секунд для присвоения канала тональной частоты определенному телефону. Если бы каналы тональной частоты применялись для слежения за местонахождением, то пришлось бы вызывать сотовый телефон и давать эту команду включить канал тональной частоты всякий раз, когда берется выборка сигнала для определения местонахождения. Это было бы неэкономичным и требовало бы значительного времени. Поэтому было бы крайне неэффективно, если бы система определения местонахождения требовала, чтобы телефон осуществлял периодические передачи по каналу тональной частоты. Во-вторых, каждая передача по каналу тональной частоты увеличивает количество вызовов, регистрируемых в соответствующей системе выставления счетов на оплату. Поэтому, если бы для системы определения местоположения требовались периодические передачи по каналу тональной частоты, это было бы очень обременительно для системы выставления счетов. В противоположность этому, передачи по каналу управления и так уже периодически осуществляются в сотовых системах. Поэтому данное изобретение совместно с существующими протоколами сотового телефона и не потребует модификации сотовой системы или отдельных сотовых телефонов. В-третьих, поскольку частотой передач в канале управления можно управлять средствами программного обеспечения, система определения местоположения согласно данному изобретению могла бы контролировать частоту передач канала управления и предлагать разным абонентам разные расценки обновления информации о местонахождении. В-четвертых, еще одно преимущество, которое дает мониторинг передач канала управления, связано с экономией энергии. Передачи в канале управления очень коротки и им требуется мало энергии по сравнению с передачами в канале тональной частоты. Соответственно требование периодических передач в канале тональной частоты обусловит значительный расход ресурса батарей питания в отдельных сотовых телефонах. Этого можно избежать с помощью мониторинга каналов управления.
Соответственно мониторинг периодических передач в канале управления дает значительные преимущества для автоматического определения местоположения мобильных сотовых телефонов. Однако мониторинг каналов управления требует обнаружения весьма слабых сигналов малой длительности, прошедших большие расстояния (например, двадцать пять миль - 46,3 км). При создании настоящего изобретения были разработаны сложные методы обработки сигналов и аппаратное обеспечение для обнаружения чрезвычайно кратких, маломощных сигналов канала управления. В связи с вышеизложенным мониторинг периодических передач канала управления (в противоположность передачам канала тональной частоты) и конкретный способ выполнения этой функции характеризуют собой значительный прогресс в развитии данной области техники.
Пример осуществления данного изобретения включает в себя по меньшей мере три системы сотовых станций и систему центральной станции. Каждая система сотовой станции содержит наземную антенну, установленную на определенной высоте; преобразователь в полосу частот модулирующих сигналов для приема сигналов сотовых телефонов и формирования сигналов полосы частот модулирующих сигналов, преобразованных из сигналов сотовых телефонов; приемник синхросигналов, общих для всех сотовых объектов и подсистему выборки сигнала полосы частот модулирующего сигнала и форматирования выбранного сигнала в группы цифровых данных. Каждая группа включает в себя заданное число битов данных и битов меток времени, в которых биты меток времени представляют время, когда приняты сигналы сотового телефона. Система центральной станции содержит средство обработки групп данных от систем сотовых станций для составления таблицы, идентифицирующей сигналы отдельных сотовых телефонов и разница во времени прихода сигналов сотового телефона для систем сотовых станций, а также средство определения на основе информации о времени прихода местонахождения сотовых телефонов, от которых получены сигналы сотовых телефонов.
В одном предпочтительном варианте осуществления изобретения система центральной станции содержит коррелятор для осуществления взаимной корреляции битов данных каждой группы от одной сотовой станции с соответствующими битами данных каждой другой сотовой станции. Кроме того, данный предпочтительный вариант осуществления предусматривает использование базы данных для хранения данных о местонахождении, идентифицирующих сотовые телефоны и их соответствующие местонахождения, и средства обеспечения доступа к базе данных для абонентов на удаленных местах. Система также содержит средство предоставления данных о местонахождении определенному пользователю сотового телефона по запросу без установления речевого вызова, например, с помощью протокола CPDP (Протокол для передачи пакетов данных отображения предусматривает передачу данных по речевым каналам, когда они иным образом в данное время не используются). Эта особенность, в частности, полезна в связи с компьютерами типа "ноутбук" или портативными компьютерами с сотовыми модемами и программным обеспечением отображения.
Варианты осуществления изобретения также могут включать в себя средство объединения данных местонахождения с данными для выставления счетов для сотовых телефонов и формирования модифицированных данных счетов на оплату. В таком варианте осуществления данные счетов указывают стоимость каждого телефонного вызова, сделанного сотовыми телефонами в течение определенного периода времени, при этом стоимость основывается на одной из нескольких определенных заранее расценках, а модифицированные данные счетов основываются на различных расценках вызовов, сделанных с одного или нескольких заданных местоположений. Например, в системе может применяться пониженная расценка при выставлении счетов на оплату телефонных вызовов, определенных из дома или с места работы пользователя либо из другого географического места.
Варианты осуществления изобретения могут также включать в себя средство для передачи сигнала на выбранный сотовый телефон для того, чтобы дать выбранному телефону команду передать сигнал по каналу управления. Это средство позволяет системе немедленно определить местоположение этого телефона, не ожидая одной из его периодических передач по каналу управления.
Помимо этого, варианту осуществления изобретения могут включать в себя средство автоматической передачи информации о местонахождении в заданную станцию приема в ответ на прием сигнала бедствия от сотового телефона. Такое средство позволяет оказать экстренную помощь пользователю, оказавшемуся в затруднительном положении. Например, когда пользователя наберет "911", система автоматически сообщит диспетчеру данной службы местонахождение этого пользователя.
Еще одним элементом предпочтительного осуществления является средство для сравнения текущего местоположения того или иного телефона с заданным диапазоном местоположения и индикации состояния "тревоги", когда текущее местоположение находится за пределами заданного диапазона. Это средство может быть использовано, например, для уведомления родителей, когда ребенок, взявший машину родителей и сотовый телефон для "поездки в торговый центр", на самом деле поехал куда-то еще. Разумеется, возможны многие другие случаи применения этой функции объявления тревоги.
И еще одним элементом предпочтительного варианта осуществления изобретения является средство для обнаружения отсутствия передачи сигналов данным телефоном и в ответ на это автоматического поискового вызова данного телефона для инициирования передачи им сигналов. Это даст возможность системе определить местонахождение телефона, который не зарегистрировался в сотовой системе. Такое обнаружение "отсутствия передачи сигнала" могло бы, например, быть использовано для того, чтобы формировать сигнал тревоги абонента на удаленных позициях.
Помимо этого, предпочтительные варианты осуществления изобретения могут также включать в себя средство оценивания времени прибытия данного телефона в заранее определенное положение. Это можно было бы использовать, например, в связи с системой общественного транспорта для определения квазинепрерывных ориентировочных моментов прибытия автобусов на установленных маршрутах. Разумеется, возможны также другие случаи применения данного средства.
Варианты осуществления изобретения могут также включать в себя средство непрерывного слежения за конкретным телефоном посредством приема речевых сигналов, передаваемых данным телефоном по каналу тональной частоты, и определения местонахождения данного телефона по речевым сигналам. Такое слежение по каналу тональной частоты можно было бы использовать как вспомогательное для средства слежения по каналу управления. Реализация этого признака может потребовать, чтобы система определения местоположения осуществляла слежение за выделением каналов каждому телефону, местоположение которого надо определить. При слежении за выделением каналов при помощи системы определения местоположения может использоваться протокол динамического выделения каналов, используемый сотовой системой.
Данное изобретение также предусматривает способы определения местоположения одного или нескольких мобильных сотовых телефонов. Эти способы включают в себя следующие операции: а) прием сигналов по меньше мере тремя географически разделенными сотовыми станциями; б) обработка сигналов на каждой сотовой станции для формирования групп данных, каждая из которых должна содержать предписанное число битов данных и битов меток времени, причем биты меток времени представляют время, когда были сформированы группы данных на каждой сотовой станции; в) обработка групп данных для идентификации сигналов отдельного сотового телефона и разница во времени прихода сигналов сотового телефона на разные сотовые станции; г) определение, исходя из моментов времени прихода сигналов, местоположения сотовых телефонов, передавших сигналы сотовых телефонов.
Один из предпочтительных вариантов осуществления способа, соответствующего изобретению, заключается в оценивании местоположении сотового телефона посредством выполнения следующих операций: 1) создание сетки теоретических пунктов, охватывающей определенный географический район, при этом теоретические пункты разделены интервалами, определяющими заданными приращениями широты и долготы; 2) вычисление теоретических величин времени задержки для множества пар сотовых станций; 3) вычисление разности наименьших квадратов (РНК) на основе теоретических значений времени задержки и измеренных значений времени задержки для множества пар сотовых станций; 4) поиск по всей сетке теоретических пунктов и определение оптимальной теоретической широты и долготы, для которой величина РНК минимальна; 5) начиная с оптимальной теоретической широты и долготы, выполнение последующей итерации по методу линеаризированных взвешенных наименьших квадратов для определения фактической широты и долготы с точностью в пределах предписанного числа градусов или доли градуса. Предпочтительно, операция вычисления (2) включает в себя учет любых известных смещений для станции, вызванных механическими, электрическими факторами или факторами окружающей среды, причем упомянутые смещения определяются периодическим вычислением положений опорных сотовых передатчиков с известными местоположениями.
Кроме того, разность наименьших квадратов предпочтительно определяется следующей формулой:
РНК = [Q12 (задержка T12 - задержка O12)2 + Q13 (задержка T13 - задержка O13)2 + ...Qxy (задержка Txy - задержка Oxy)2],
где
задержка Txy - представляет теоретическую задержку между сотовыми станциями x и y; x и y являются индексами, представляющими сотовые станции; задержка Oxy представляет измеренную задержку между объектами x и y; Qxy представляет коэффициент качества для измерения задержки между сотовыми станциями x и y, коэффициент качества определяется как оценка степени воздействия многолучевого распространения или иных аномалий на конкретное измерение задержки.
Кроме того, способ, соответствующий изобретению, может включать в себя обнаружение первого переднего фронта сигнала сотового телефона и режектирование последующих передних фронтов сигнала сотового телефона. Это дает возможность системе уменьшить эффекты многолучевого распространения.
Кроме того, предпочтительные варианты осуществления изобретения включают в себя оценивание скорости (скорость и направление) сотового телефона посредством выполнения операций, аналогичных тем, которые выполняются для оценивания местонахождения, включая 1) составление сетки теоретических пунктов, охватывающей заданный диапазон скоростей, при этом теоретические пункты разделены интервалами, определяемыми заданными приращениями, 2) вычисление теоретических значений разности частот для множества пар сотовых станций; 3) вычисление разности наименьших квадратов (РНК), исходя из теоретического значения разности частот и измеренной разности частот для множества пар сотовых станций; 4) поиск по всей сетке теоретических пунктов и определение оптимальной теоретической скорости, для которой значение РНК минимально; 5) начиная с оптимальной теоретической скорости, выполнение по следующей итерации по методу линеаризированных взвешенных наименьших квадратов для определения фактической скорости с точностью в пределах заданного допуска.
Прочие признаки данного изобретения описываются ниже.
На фиг. 1A изображен пример схемы многократного использования частоты, применяемой в системе сотовой телефонной связи; на фиг. 1B - схематическое изображение примера назначения каналов при использовании разбиения сотов на сектора; на фиг. 1C - схематическое изображение основных компонентов системы сотовой телефонной связи; на фиг. 2 - схема системы определения местоположения сотового телефона в соответствии с данным изобретением; на фиг. 3 - блок-схема предпочтительного варианта осуществления системы 12 сотовой станции; на фиг. 4 - блок-схема предпочтительного варианта осуществления изобретения преобразователя 12-3 полосы частот модулирующих сигналов, где использованы следующие обозначения:
1 - вход радиочастоты
2 - антенна
3 - полосовой фильтр
4 - смеситель
5 - генератор
6 - буферный усилитель
7 - делитель
8 - частота от управляющего устройства
9 - промежуточная частота
10 - выход верхней боковой полосы
11 - фильтр нижних частот
12 - автоматический регулятор усиления
13 - верхняя боковая полоса к дискретизатору
14 - квадратичный детектор
15 - к управляющему устройству
16 - монитор передней панели
17 - гетеродин
18 - смеситель
19 - выход нижней боковой полосы
20 - блок распределения мощности
21 - от управляющего устройства
22 - к управляющему устройству
23 - квадратичный детектор
24 - шина IEEE488 от компьютера
25 - синтезатор
26 - нижняя боковая полоса к дискретизатору.
На фиг. 5 изображена схема формата данных, обеспечиваемого блоком 12-5 форматирования; на фиг. 6 - блок-схема одного предпочтительного варианта осуществления системы 16 центральной станции, где использованы следующие обозначения:
1 - выборки антенны 1
2 - выборки антенны 2
3 - выборки антенны N
4 - блок схем интерфейса/деформатирования Ti CSU
5 - данные
6 - тактовый сигнал
7 - двойной регистр с плавающей запятой
8 - выбор 2 из N
9 - генератор тактового сигнала
10 - управление ЗУПВ
11 - данные A
12 - данные B1
13 - данные B2
14 - компьютер
15 - комплексный регулятор.
На фиг. 7 изображена блок-схема коррелятора для использования в системе 16 центральной станции; на фиг. 8 - упрощенная блок-схема предпочтительной последовательности операций системы центральной станции; на фиг. 9 - блок-схема с изображением примерных вариантов осуществления систем сотовых станций, используемых в системе определения местоположения, которая производит взаимную корреляцию сигналов сотовых станций; на фиг. 10-14 - блок-схемы, иллюстрирующие функционирование системы 16 сотовой станции при получении данных корреляции, данных временной задержки и разности частот и при определении местоположения сотового телефона на основе этих данных; на фиг. 15 - схема реализации способа создания модифицируемой ленты счета на оплату в соответствии с данным изобретением.
Предпочтительные варианты осуществления данного изобретения включают в себя сеть приемников, находящихся на нескольких сотовых станциях в сотовой системе. Эти приемники прослушивают команды/ответы мобильного канала управления, которые обычно передаются в сотовой системе, и оценивают физическое местоположение каждого сотового телефона, действующего в пределах данной системы. Исходя из известной идентификации каждого телефона, полученной в результате приема в канале управления, и оценки физического местоположения телефона, система постоянно формирует поток данных в реальном времени, который поступает в базу данных. База данных может находиться там же, где расположен сотовый коммутатор, либо может быть в другом удобном месте. Поток данных, поступающий в базу данных, включает в себя ряд чисел, причем первое число является номером телефона; второе число - оценка широты, долготы и высоты передатчика; третье - метка времени измерения. Программное обеспечение базы данных, которое обрабатывает поток данных, может поддерживаться оператором системы определения местоположения, а не оператором системы сотовой телефонной связи, если они оба не одно и то же лицо.
Система определения местоположения работает с использованием частот, присвоенных каналам управления сотовой системы. Сотовые телефоны используют эти каналы управления для поддержания регулярного контакта с сотовой системой; при этом интервал времени между каждым контактом обычно не превышает тридцати минут и в общем составляет около десяти минут. Каждый канал управления включает в себя поток данных, кодированных манчестерским кодом - 10 кБ/с. На один сотовый сектор или на всю сотовую станцию используется только один канал управления. Система определения местоположения может функционировать только путем прослушивания передач сотовых телефонов по каналу управления; она не зависит от передач по каналу управления от других сотовых станций. Предпочтительно система определения местоположения включается в себя оборудование, которое размещено на вышках сотовой системы (хотя оборудование может находится и на других высоких сооружениях), в помещениях для размещения оборудования сотовых станций и на станции (ях) центрального коммутатора.
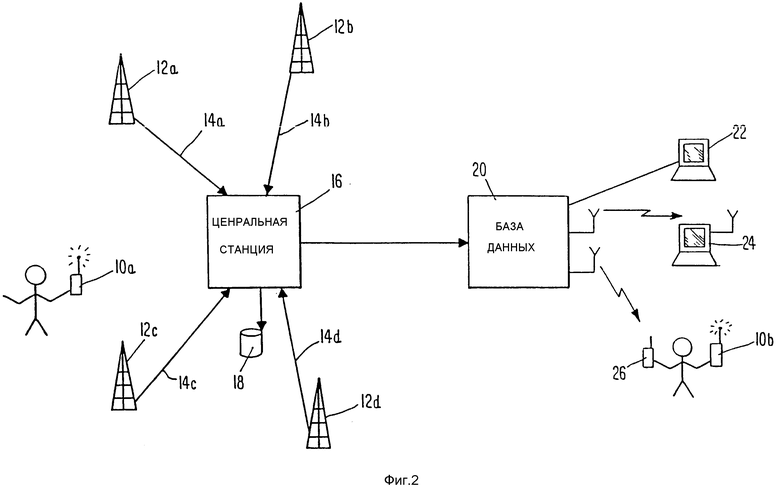
Как показано на фиг. 2, система определения местоположения сотового телефона в соответствии с данным изобретением содержит по меньшей мере три, а предпочтительно более трех, систем 12a, 12b, 12c, 12d. (Нужно отметить, что данный чертеж, как и другие чертежи, представлены в упрощенном виде, т.е. некоторые элементы и взаимосвязи не отображены). Однако приводимое здесь описание и прилагаемые чертежи достаточны, чтобы специалист в данной области мог осуществить и использовать описываемое изобретение. Каждая система сотовой станции может располагаться на сотовой станции системы сотовой телефонной связи, тем не менее это не обязательно, поскольку дополнительная антенна и приемное оборудование могут размещаться в местах, не перекрываемых полностью сотовыми станциями. На фиг. 2 также показан пользователь с сотовым телефоном 10a. Как описано ниже, каждая система сотовой станции включает в себя антенну, которая может устанавливаться на той же вышке или здании, что и антенна, используемая системой сотовой телефонной связи. Помимо этого, каждая система сотовой станции включает в себя оборудование (описывается ниже), которое можно поместить в корпусе для размещения оборудования соответствующей сотовой станции. Таким образом, система определения местоположения сотового телефона может совмещаться с системой сотовой телефонной связи, благодаря чему ее осуществление может быть достаточно экономичным. Системы 12a, 12b, 12c, 12d сотовых станций взаимосвязаны линиями связи 14a, 14b, 14c, 14d(например, линии связи T1), идущими к центральной станции 16. Центральная станция 16 может размещаться вместе с коммутатором мобильных телефонов системы сотовой телефонной связи. Центральная станция 16 может включать в себя ЗУ 18 на дисках.
Центральная станция 16, кроме того, связана с базой данных 20, которая может быть удалена от центральной станции и предоставлена для доступа абонентов. Например, на фиг. 2 показан первый терминал 22, связанный через модем (не показан) и телефонную линию с базой данных 20; второй терминал 24, связанный с базой данных 20 по радиоканалу, и третий, портативный терминал 26, носимый пользователем, у которого также есть сотовый телефон 10b, связанный с базой данных по радиоканалу. Пользователь с сотовым телефоном 10b и портативным терминалом 26 может определять свое собственное местонахождение посредством доступа в базу данных. Портативный терминал 26 может включать в себя специальное программное обеспечение картографирования для отображения местонахождения пользователя, например, на карте, на терминале 26. Кроме этого, сотовый телефон и портативный терминал можно было бы совместить в одном аппарате.
Системы сотовых станций.
На фиг. 3 представлена блок-схема предпочтительного варианта осуществления системы 12 сотовой станции. До обсуждения этого варианта осуществления системы сотовой станции следует отметить, что имеется два варианта предпочтительного осуществления для оборудования на каждой сотовой станции, при этом конкретное осуществление отдельной сотовой системы зависит от желательного уровня затрат.
Первый вариант предпочтительного осуществления включает: 1) антенну для приема сигналов сотового диапазона частот; 2) полосовой фильтр малой задержки с шириной полосы частот в 630 кГц, расположенного в десяти-пятнадцати футах (3,048 - 4,572 м) от сотовой антенны для устранения помех от соседнего канала; 3) усилитель с достаточным коэффициентом усиления для компенсации потерь в кабеле на расстоянии от усилителя до следующего фильтра, которое обычно равно высоте вышки антенны, плюс горизонтальное расстояние, по которому проложен кабель; 4) набор 21 индивидуальных полосовых фильтров малой задержки, каждый из которых имеет ширину полосы 30 кГц с центральной частотой на частоте соответствующего из 21 каналов управления; 5) набор из 21 схемы автоматического регулирования усиления (АРУ) с динамическим диапазоном 70 дБ (не все эти компоненты изображены на фиг. 3). Этот вариант осуществления предпочтителен вследствие обеспечиваемой им эффективной селекции и подавления помех.
Второй вариант осуществления включает: 1) антенну для приема сигналов в сотовой полосе частот; 2) половой фильтр малой задержки с шириной полосы 630 кГц, размещенный в десяти - пятнадцати футах (3,048 - 4,572 м) от сотовой антенны для исключения помех от соседнего канала; 3) усилитель с достаточным коэффициентом усиления для компенсации потерь в кабеле на расстоянии от усилителя до последующего фильтра, которое обычно равно высоте вышки антенны, плюс горизонтальное расстояние, по которому проложен кабель; 4) второй полосовой фильтр малой задержки с шириной полосы 630 кГц; 5) схему АРУ с динамическим диапазоном 70 дБ.
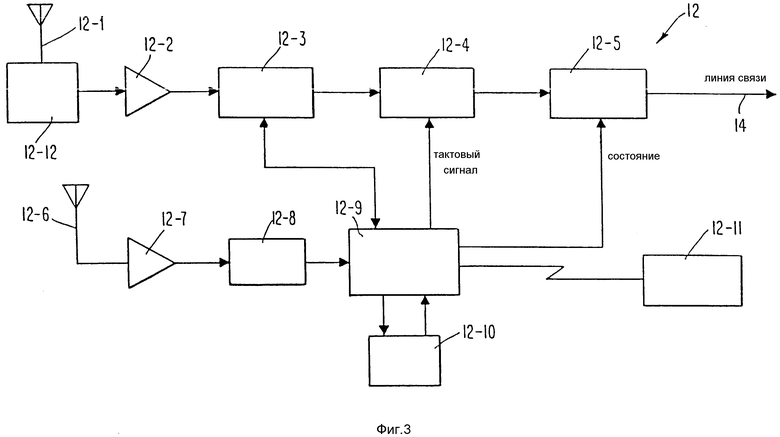
На фиг. 3 представлен пример осуществления системы 12 сотовой станции, содержащей первую антенну 12-1, которая устанавливается на возвышенном месте предпочтительно на том же сооружении, которое использует система сотовой телефонной связи для установки антенны сотовой станции. Первая антенна 12-1 может быть независимой от сотовой системы либо может быть антенной, которую используют сотовая система, т.е. система определения местоположения может использовать часть сигнала от антенны сотовой системы. Блок 12-12 фильтра схемы АРУ выгоднее разместить рядом с антенной 12-1. Это снизит потери в кабеле, обусловленные распространением радиочастотного сигнала по коаксиальному кабелю от антенны в приемную аппаратуру сотовой станции. Система 12 сотовой станции помимо этого содержит усилитель 12-2 (как указывалось выше, в предпочтительном случае усилитель 12-2 включает в себя наборы фильтров и схем АРУ - по одному на каждый канал управления); преобразователь полосы частот модулирующих сигналов 12-3; блок выборки 12-4, который включает в себя дискретизатор верхней боковой полосы и дискретизатор нижней боковой полосы; блок форматирования 12-5, который может быть выполнен на основе средств программного обеспечения; вторая антенна 12-6 для приема данных синхронизации, например, от глобальной системы определения местоположения (ГСОМ); усилитель 12-7; приемник 12-8 сигнала синхронизации (ГСОМ, например); блок 12-9 АРУ/управления; генератор 12-10 частоты 5 МГц; и компьютер 12-11. Система 12 сотовой станции связана с центральной станцией 16 (фиг.2) линией связи 14.
Система 12 сотовой станции принимает сигналы одного или нескольких сотовых телефонов, передаваемых по каналу управления от одного или нескольких сотовых телефонов, преобразует эти сигналы полосы частот модулирующих сигналов, осуществляет дискретизацию сигналов этой полосы (частота дискретизации определяется тактовым сигналом от блока 12-9 АРУ/управления) и форматирует дискретизированные сигналы в группы данных заданного формата. Формат групп данных описывается ниже со ссылкой на фиг. 5. Группы данных обрабатываются на центральной станции, как описано ниже.
Генератор 12-10 частоты 5 МГц обеспечивает общую опорную частоту для всей аппаратуры сотовой станции. Его частота контролируется устройством управления 12-9 на основе выполняемых устройством управления измерений промежутка времени между приемом односекундного маркировочного сигнала от приемника 12-8 сигнала синхронизации и местным односекундным маркировочным сигналом.
Компьютер 12-11 одновременно выполняет три различные функции:
1) Считывает выходной сигнал квадративных детекторов 54 и 60 в преобразователе 12-3 полосы частот модулирующих сигналов (см. фиг.4 и нижеследующее описание) и затем вычисляет надлежащие сигналы управления, которые передаются в схемы фильтров 48 и 50 (фиг.4) для регулирования усиления и ослабления в этих схемах с целью поддержания на выходной мощности на постоянном уровне.
2) Компьютер принимает сигнал при каждом появлении односекундного маркировочного сигнала от приемника 12-8 сигнала синхронизации. В это время он считывает из управляющего устройств 12-9 разность времен прихода односекундного маркировочного сигнала с приемника 12-8 сигнала синхронизации и соответствующего односекундного маркировочного сигнала, местного для управляющего устройства 12-9. Односекундный маркировочный сигнал в управляющем устройстве 12-9 генерируется генератором 12-10 частоты 5 МГц. Затем компьютер вычисляет сигнал, передаваемый обратно в генератор частоты 5 МГц для изменения его частоты с целью синхронизации маркировочного односекундного сигнала приемного устройства сигнала синхронизации и местного односекундного сигнала.
3) Он вычисляет информацию, подлежащую кодированию в двоичном разряде индикации состояния (см. фиг.5) и отправляет эту информацию в управляющее устройство 12-9.
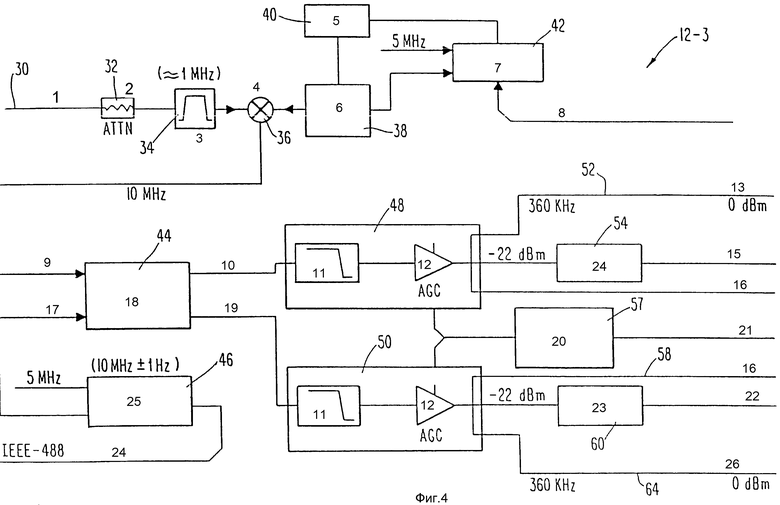
Как показано на фиг. 4, предпочтительный вариант осуществления преобразователя 12-3 полосы частот модулирующих сигналов включает в себя соединитель 30 ввода сигнала радиочастоты, к которому подсоединена установленная на требуемой высоте наземная антенна 12-1 (фиг.3) (через усилитель 12-2 и фильтр/АРУ 12-2) и за которым расположены аттенюатор 32 и фильтр полосы частот модулирующих сигналов 34, который устанавливает уровень и ограничивает амплитудно-частотную характеристику преобразователя полосы частот модулирующих сигналов. За фильтром 34 следует смеситель 36 сигналов одной боковой полосы, который смешивает радиочастотный сигнал с сигналом гетеродина с буферного усилителя 38 с получением сигнала первой промежуточной частоты. Промежуточная частота в предпочтительном варианте осуществления примерно равна 10 МГц. Выходной сигнал буферного усилителя 38, кроме того, подается на делитель 42, где он сравнивается с опорной частотой 5 МГц с управляющего устройства 12-9 (фиг.3). Выходной сигнал делителя 42 используется для управления частотой генератора 40, таким образом, совместное действие генератора 40, делителя 42 и буферного усилителя 38 обеспечивает получение гетеродинного сигнала, синхронизированного по фазе с опорной частотой 5 МГц от управляющего устройства 12-9. Сигнал первой промежуточной частоты затем направляется в смеситель 44 сигналов одной боковой полосы, где он с помощью синтезатора 46, управляемого компьютером, преобразуется на частоту полосы частот модулирующих сигналов. Синтезатор 46 также синхронизирован по фазе с сигналов на частоте 5 МГц от управляющего устройства. Выходной сигнал верхней боковой полосы (ВБП) смесителя 44 затем направляется в фильтр/усилитель с АРУ 48, где он фильтруется и его мощность постоянно подстраивается до номинальной величины. Выходной сигнал нижней боковой полосы (НБП) смесителя 44 подвергается аналогичной обработке фильтром/усилителем 50 с АРУ. Выходной сигнал фильтра/усилителя 48 с АРУ включает в себя сигнал на частоте 375 кГц с уровнем 0 дБм, направляемый в дискретизатор верхней боковой полосы, который является частью блока дискретизации 12-4, по проводнику 52, при этом отдельный выходной сигнал с уровнем 22 дБм направляется в квадратичный детектор 54, и отдельный выходной сигнал направляется на монитор передней панели (не показан). Выходной сигнал фильтра/усилителя 50 с АРУ включает в себя сигнал на частоте 375 кГц с уровнем 0 дБм, направляемый в дискретизатор нижней боковой полосы по проводнику 64; при этом отдельный выходной сигнал с уровнем 22 дБм направляется в квадратичный детектор 60, а отдельный выходной сигнал - на монитор передней панели. Преобразователь 12-3 полосы частот модулирующих сигналов также включает в себя схему распределения мощности 57, которая обеспечивает питание для схем 48 и 40 фильтра/АРУ.
На фиг. 5 представлен предпочтительный формат данных, обеспечиваемый блоком форматирования 12-5 для центральной станции 16 (фиг. 2) по линии связи 14. Показано, что блок форматирования 12-5 обеспечивает для линии связи скорость передачи данных приблизительно 1,536 Мб/с. Каждая группа содержит 64 бита цикловой синхронизации, 48 двоичных разрядов индикации состояния, 60 кб данных выборки (1,5 Мб, деленных на 25 групп/с), и приблизительно 3,6 кб данных "заполнения". 1,5 Мб данных выборки представляют выборки сигналов верхней и нижней боковой полосы. Двоичные разряды индикации состояния включают в себя метку времени, представляющую точное время формирования группы данных, что, по существу, то же самое, что и время, когда радиочастотный сигнал был получен на данной сотовой станции.
Система центральной станции.
На фиг. 6 представлена блок-схема системы 16 центральной станции. В предпочтительном варианте осуществления система центральной станции включает в себя шестнадцать вводов данных, каждый из которых соединен с каналом Т1 от одной из сотовых станций. Каждый ввод данных связан со схемой 16-1 (например, N1 CSU) интерфейса/деформатирования, которая принимает биполярный сигнал Т1 и выводит биты данных и тактовый сигнал. Биты данных из каждого канала тактируются в регистр (стековой памяти магазинного типа - FIFO) 16-2 посредством тактового сигнала из этого канала. Компьютер 16-8 выбирает два из канальных FIFO посредством переключателя 16-3 "выбора 2 из N". Генератор тактового сигнала 16-4 считывания выборок управляется компьютером 16-8 и памятью с произвольной выборкой 16-5: для считывания битов выборок из ранее отобранных FIFO. Выход FIFO одного выбранного канала называется "ДАННЫЕ А", а выход FIFO другого выбранного канала - "ДАННЫЕ B". Для выборок "ДАННЫХ B"вычисляется квадратурная составляющая, аппроксимируемая преобразованием Гильберта, реализуемым генератором 16-6 квадратурного канала, в результате чего формируется синфазный выход B1 и квадратурный выход B2. Комплексный коррелятор 16-7 затем используется для вычисления коэффициента корреляции сигналов "ДАННЫХ А" и "ДАННЫХ B1" и сигналов "ДАННЫХ А" и "ДАННЫХ В2" в функции временной задержки, введенной между "ДАННЫМИ А", "ДАННЫМИ В1" И "ДАННЫМИ А", "ДАННЫМИ В2" соответственно. Комплексный коррелятор может быть реализован аппаратными средствами или средствами программного обеспечения, или их сочетанием, хотя аппаратные средства сейчас предпочтительны, поскольку обеспечивают большую скорость обработки данных. (Пример осуществления комплексного коррелятора описывается ниже со ссылками на фиг.7).
Компьютер 16-8 используется для периодического считывания получаемых корреляций. Корреляционная обработка, включающая в себя переключение переключателя "выбора 2 из N", считывание содержимого FIFO, формирование квадратурных составляющих выборок и определение корреляции, достаточное быстродействие, поэтому может использоваться один комплексный коррелятор 16-7 для последовательной обработки всех пар из числа шестнадцати каналов ввода данных.
Ввиду того, что сотовые сигналы в общем случае слабые (например, не более 6 мВт в сотовом телефоне), требуется надежный и точный метод обнаружения сигнала в возможно большем числе сотовых станций и последующего точного определения времени одного и того же фронта принятого сигнала на каждой сотовой станции. Эта характеристика точного хронирования поступления сигнала особо важна для вычисления задержек между парами сотовых станций и, следовательно, для вычисления местоположения.
Фиг.7 иллюстрируют метод взаимной корреляции до обнаружения, применяемый в предпочтительных вариантах осуществления данного изобретения, предусматривающий ввод дискретизированного сильного сотового сигнала от первой сотовой станции на вход 72 и ввод задержанного дискретизированного сотового сигнала от любой из второй, третьей, четвертой и др. сотовых станций на вход 70. Коррелятор может быть осуществлен либо с помощью аппаратных средств, либо средств программного обеспечения в зависимости от экономических соображений для конкретной системы. Коррелятор предпочтительно включает в себя шестнадцать каналов сдвиговых регистров 74, двухбитовые перемножители 76 и счетчики 78. Множество корреляторов могут использоваться последовательно, причем каждый коррелятор в этом случае попускает биты через свой сдвиговый регистр к следующему коррелятору, создавая множество каналов задержки.
Дискретизированный сотовый сигнал от второй сотовой станции вводится в цепочку сдвиговых регистров 74. Выходы регистров затем подаются одновременно на все двухбитовые перемножители. Для каждого канала задержки сигнальный вход 70, задержанный на заданное число периодов выборки, подается на каждый перемножитель вместе с дискретизированным сотовым сигналом с входа 72. Выходы перемножителей 76 соединены с суммирующими схемами, состоящими из 24-битовых счетчиков 78. Выходной сигнал каждого счетчика пропорционален степени взаимной корреляции для данной относительной задержки.
С помощью множества задержек или корреляционных каналов можно одновременно осуществить измерения для большого диапазона относительных задержек. Число требуемых запаздываний определяется с учетом географического района, в котором определяется местоположение, скорости света и полосы принимаемого сигнала, который подается в коррелятор. Например, в описанном выше варианте осуществления каналы управления группируются в верхнюю и нижнюю боковые полосы, каждая с шириной полосы 375 кГц. Этот сигнал должен дискретизироваться с минимальной частотой Найквиста либо с более высокой частотой, например, 750 кб/с. Если нужно просмотреть участок в 100 км, то требуемое число запаздываний определяется следующим образом: .
.
Как указано выше, в одном из вариантов осуществления используются индивидуальные приемники для каждого сотового канала управления. Если этот канал дискретизируется с частотой 71,428 кГц, то необходимое число запаздываний составит: .
.
Работа системы определения местоположения.
1. Общие сведения.
На фиг. 8 представлена упрощенная блок-схема обработки, которую выполняет система 16 центральной станции. (Подробная блок-схема обработки сигнала представлена на фиг. 10-14). Сначала эта система принимает группу данных от каждой сотовой станции. Затем каждая группа с данной сотовой станции (или часть дискретизированных сигналов каждой группы) взаимно коррелируется с каждой соответствующей группой (или с частью дискретизированных сигналов каждой другой группы) от других сотовых станций. (Термин "соответствующий" относится к группам, ассоциированным с тем же интервалом времени). Затем система формирует таблицу данных, идентифицирующих индивидуальные сигналы, принятые системой определения местоположения сотового телефона в течение интервала времени, представленного обрабатываемыми в данное время группами данных, причем индивидуальные сигналы на фиг.8 представлены буквами "A"," B", "C". Кроме того, таблица идентифицирует время прихода сигналов на каждую станцию. Эти времена прихода сигналов представлены индексами "Т1", "Т2", "Т3". Таким образом, система идентифицирует сигналы, принятые от одного или нескольких сотовых телефонов в течение определенного интервала времени, а также идентицифицирует время прихода этих сигналов на соответствующие сотовые станции. Затем эта информация используется для вычисления разности времен прихода (РВП) и разности частот прихода (РЧП), последняя используется для получения оценки скорости. Эти данные затем фильтруются для исключения тех пунктов, которые система считает ошибочными. Затем отфильтрованные данные РВП используются для вычисления местонахождения (например, по широте и долготе) того или иного сотового телефона, передавшего каждый из сигналов A, B, C. Затем система декодирует телефонный номер, соответствующий каждому сотовому телефону, местонахождение которого определено. Декодирование телефонного номера может выполняться средствами программного обеспечения в компьютере 16-8 или аппаратными средствами (не показаны), имеющимися на сотовых станциях. Система использует самую сильную выборку (с наибольшей мощностью) каждого сигнала для определения его телефонного номера. Затем данные местонахождения и телефонного номера каждого телефона записываются в базе данных 20 или хранятся на месте в местном ЗУ18 на дисках (фиг.2). Наконец, данные могут быть предоставлены пользователю, диспетчеру или системе выставления счетов. Поля (данные), посланные пользователю, диспетчеру или в систему выставления счетов предпочтительно включают в себя биты данных, представляющие набранные цифры, двоичные разряды индикации состояния и тип сообщения из числа стандартных сообщений канала управления сотовой связи. Биты данных могли бы использоваться пользователем или диспетчером для передачи кодированных сообщений на терминал с дисплеем. Таким образом, в дополнение к услугам по определению местоположения система определения местоположения могла бы предоставлять в ограниченной форме услуги по передаче сообщений без дополнительных затрат.
Надо отметить, что термин "разность времен прихода" (или РВП) может относится к времени прихода сигнала сотового телефона на одну сотовую станцию (например, на сотовую станцию А), которое определено считыванием времени на этой станции минус время прихода сигнала этого же сотового телефона на вторую сотовую станцию (сотовую станцию В), определенное считыванием времени на второй сотовой станции. Этот анализ должен выполняться для всех станций А и В. Однако не требуется измерять отдельные времена прихода, необходима только разность между временами прихода сигнала на сотовые станции конкретной пары. Кроме этого, разность частот прихода сигналов (или РЧП) относится к частоте сотового сигнала в первой сотовой станции (сотовая станция А), измеренной сравнением с сигналом генератора частоты 5 МГц этой сотовой станции минус та же самая величина для другой станции (сотовая станция В). Данные РЧП могут быть использованы для оценивания широты и долготы сотового телефона вычислением тех значений долготы и широты, для которых сумма квадратов разности между измеренной РВП и РВП, вычисленной из геометрии сотовой станции и предлагаемого местонахождения сотового телефона, минимальна, причем просмотр анализируемых широт и долгот охватывает весь обслуживаемый район системы. Данные РЧП могут быть использованы для измерения скорости (скорость и направление движения) сотового телефона. Оценивание скорости может выполняться в порядке, аналогичном оцениванию местонахождения.
2. Обнаружение сигнала канала управления.
Соответствующий изобретению способ обнаружения весьма слабых сигналов канала управления имеет два предпочтительных варианта осуществления, выбор конкретного из них зависит от допустимого уровня капитальных и эксплуатационных затрат на создание той или иной системы. Оба способа предусматривают компенсацию изменчивости отдельного сотового сигнала. То есть, передача в канале управления содержит множество полей данных, таких как номер сотового телефона, электронный серийный номер, набранные цифры, тип сообщения, двоичные разряды индикации состояния и другие биты, которые делают сотовый сигнал изменчивым. Поэтому такой сигнал не может сравниваться с каким-либо заполненным сигналом, поскольку каждая передача является потенциально уникальной.
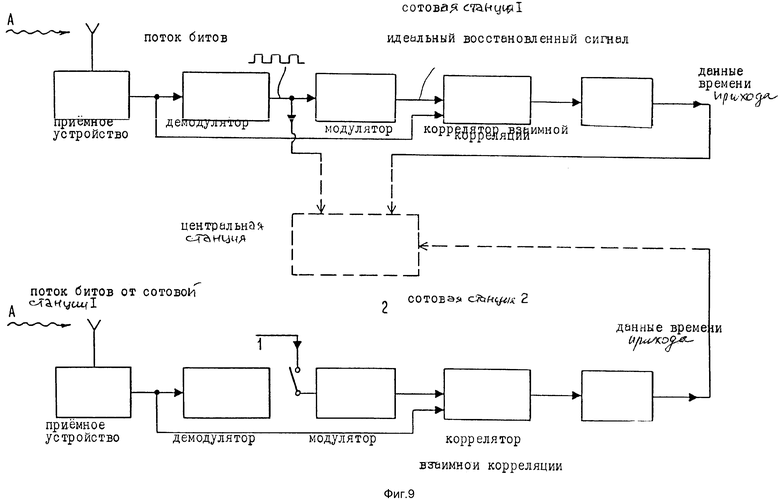
В первом способе капитальные затраты на системы сотовых объектов выше, но линии связи имеют меньшее быстродействие, например, 56 кб/с, поэтому эксплуатационные затраты у них ниже. На фиг. 9 схематично иллюстрируется этот способ с помощью функциональных компонентов систем сотовых станций. В этом способе взаимные корреляции выполняются на сотовых станциях следующим образом. Каждый "сильный" сигнал (напр., сигнал "А"), принимаемый в данном канале управления на данной сотовой станции (причем сильным считается сигнал по меньшей мере на несколько дБ выше уровня помех), сначала поступает в декодер сигнала, используемый самой сотовой системой. Этот декодер демодулирует сотовый сигнал для формирования исходного потока цифровых битов, который был модулирован для формирования сотового сигнала. Если декодер не может демодулировать цифровой поток в пределах допустимой погрешности, то этот сильный сигнал режектируется как исходный пункт для остальной части этой обработки. Этот поток цифровых битов затем модулируется системой сотовой станции для восстановления исходной формы сигнала в том виде, в каком он был в первый раз передан сотовым телефоном. Эта восстановленная форма сигнала взаимно коррелируется относительно принятого сигнала на первой сотовой станции. Взаимная корреляция дает пик, по которому можно определить точное время прихода по заранее определенной точке на этом пике.
Система первой сотовой станции затем посылает поток демодулированных цифровых битов и данные точного времени прихода на центральную станцию по линии связи. Центральная станция затем распределяет поток демодулированных цифровых битов и точное время прихода на другие сотовые станции, которые, вероятно, тоже приняли сотовую передачу. На каждой из этих станций (первой, второй, третьей, четвертой и т.д.) поток цифровых битов модулируется системой сотовой станции, чтобы восстановить первоначальную форму сигнала в том виде, в каком он был в первый раз передан сотовым телефоном. Эта восстановленная форма сигнала взаимно коррелируется с сигналом, принятым на каждой сотовой станции в течение этого же интервала времени. В этом случае этот интервал времени относится к интервалу, охватывающему от нескольких сот до нескольких тысяч микросекунд в любом направлении времени прихода сильного сигнала на первую сотовую станцию. Взаимная корреляция может сформировать пик, а возможно и нет; если пик сформирован, то точное время прихода может быть вычислено по заранее заданной точке на пике. Это точное время прихода затем передается по линии связи на центральную станцию, на которой можно вычислить разность задержек для той или иной пары сотовых станций. Этот способ дает возможность системам сотовых станций выделить информацию о времени прихода из очень слабого принятого сигнала, причем слабый сигнал может быть выше или ниже уровня шума. Кроме того, взаимная корреляция, определяемая на сотовых станциях, дает возможность системам сотовых станций обнаруживать первый передний фронт сигнала сотового телефона и режектировать последующие передние фронты сигналов, обусловленных многолучевым распространением. Важность такого снижения эффектов многолучевого распространения понятна для специалистов в данной области техники. Этот способ итеративно применяется для достаточного числа пар сотовых станций по каждому сильному сигналу, принимаемому на каждой сотовой станции для каждого интервала дискретизации. Для любой данной телефонной передачи этот способ применяется однократно. Результаты определения пар задержек по каждому сигналу затем направляются на обработку согласно алгоритму вычисления местонахождения.
В случае второго способа системы сотовых станций относительно экономичные, т.к. они в основном осуществляют выборку сигнала каждого из каналов управления и отсылают полученную информацию назад на центральную станцию. Однако, поскольку корреляция не выполняется на каждой сотовой станции, все данные выборок должны передаваться на центральную станцию. Для этого требуется высокоскоростная линия связи, например линия Т1. Центральная станция принимает данные от всех сотовых станций по идентичным линиям связи, причем данные дискретизированы и имеют метки времени, использующие одно и то же опорное время (полученное от приемника хронирования). Этот способ используется итеративно применительно к достаточному числу пар сотовых станций для каждого сильного сигнала, принятого на каждой сотовой станции для каждого интервала выборки. Этот способ для любой данной телефонной передачи применяется однократно. Результаты определения пар задержек по каждому сигналу затем направляются на обработку согласно описанному ниже алгоритму вычисления местонахождения.
3. Определение местоположения
Предпочтительный алгоритм, используемый для вычисления местонахождения сотового телефона, представляет собой итеративный процесс. На первом этапе процесса создается сетка теоретических пунктов, которая охватывает географический район системы сотовой телефонной связи. Например, эти пункты могут располагаться с интервалами, определяемыми приращением в 1/2 мин или с иным приращением по широте и долготе. По каждому из этих теоретических пунктов для каждой соответствующей пары сотовых станций вычисляются теоретические величины задержки. При вычислении теоретических величин задержки любые известные смещения станций учитываются при вычислениях. Такие известные смещения могут быть вызваны механическими, электрическими факторами или факторами окружающей среды и могут время от времени изменяться. Смещения станции определяются путем периодического определения местоположения опорных сотовых передатчиков. Поскольку опорные передатчики, по определению, имеют известное местоположение, любое отклонение в вычисленном местоположении передатчика относительно известного его местоположения считается вызванным постоянными или временными смещениями станции. Предполагается, что эти смещения станции также влияют на измерения неизвестных местоположений сотовых телефонов.
После вычисления теоретических задержек по каждому теоретическому пункту на стыке выполняется вычисление разности наименьших квадратов между теоретическими задержками и фактическими измерениями задержки по каждой паре сотовых станций, по которым задержки можно определить путем корреляционной обработки. Вычисление наименьших квадратов учитывает коэффициент качества по каждому измерению фактической задержки. Коэффициент качества определяется оценкой степени влияния многолучевого распространения или иных аномалий на данное измерение задержки. (Описание этого коэффициента качества дается ниже). Поэтому уравнение разности наименьших квадратов принимает следующую форму:
РНК= [Q12 (задержка N12 - задержка O12)2 + Q13 (задержка Т13 - задержка О13)2 +...Qxy (задержка Тxy - задержка Оxy)2],
где
задержка Т - теоретическое значение задержки между сотовыми станциями x и y; задержка Оxy - измеренное значение задержки между сотовыми станциями x и y; Qxy - коэффициент качества для измерения задержки между сотовыми станциями x и y; ПНК - величина разности наименьших квадратов, которая сведена к абсолютному минимуму по географическому району сотовой системы.
При обработке по этому алгоритму просматривается сетка теоретических пунктов и определяется оптимальный теоретический пункт, для которого минимизирована РНК. После определения этой оптимальной теоретической широты-долготы алгоритм выполняет еще одну итерацию линеаризированных взвешенных наименьших квадратов, аналогичную описанному выше процессу, чтобы получить значение фактической широты-долготы с точностью в пределах 0,0001 град. или в других заданных пределах разрешающей способности. Вычисление широты-долготы в два этапа может значительно снизить объем необходимой обработки данных по сравнению с другими способами.
Специалисты в данной области техники обратят внимание на то обстоятельство, что итеративный метод определения положения автоматически включает в вычисление положения сотового телефона факторы геометрического снижения точности (ГСТ). Т.е. отдельная таблица для ГСТ не нужна, поскольку обе итерации в вычислении сетки величин теоретической задержки также вычисляют и величины погрешности.
Сигналы сотового телефона искажаются под воздействием многолучевого распространения и прочих отрицательных факторов при распространении от сотового телефона к различным сотовым станциям. Поэтому описываемые здесь способы предусматривают компенсацию многолучевого распространения. Как указывалось выше, скорость передачи символов потока цифровых битов сотового канала управления составляет 10 кб/с; время прохождения бита - 100 мкс. Опубликованные исследования многолучевого распространения показывают, что обычные задержки многолучевого распространения в городских и пригородных условиях находятся в пределах 5-25 мкс. При создании данного изобретения было обнаружено, что типичным эффектом многолучевого распространения в этом случае является удлинение времени прохождения бита в потоках цифровых данных и что описанные выше алгоритмы корреляции могут определить степень нарушения качества конкретной передачи. Как упомянуто выше, при выполнении взаимной корреляции коэффициент качества Qxy может быть вычислен, исходя из размера пика взаимной корреляции и ширины пика, причем Qxy представляет собой коэффициент качества для измерения величины конкретной задержки для данной пары сотовых станций. Этот коэффициент качества используется для взвешивания вычисления наименьших квадратов, применяемого при определении положения, и тем самым для ослабления эффектов многолучевого распространения.
Фиг. 10-14 совместно иллюстрирует блок-схему процедуры обработки сигнала, используемой системой определения местоположения для: 1) получения данных корреляции, 2) получения данных временной задержки и разности частот и 3) вычисления данных местонахождения. На фиг. 10 изображен процесс обработки, применяемый для получения данных корреляции. В начале процесса обработки определяется, превышает ли заданный порог принимаемая мощность на той или иной сотовой станции. Если превышает, то вводы комплексного коррелятора устанавливаются для обработки данных этой сотовой станции в режиме автокорреляции, т.е. оба ввода устанавливают для приема данных от одной и той же сотовой станции. Затем система ждет, пока коррелятор закончит вычисление данных автокорреляции. После этого данные автокорреляции подвергаются преобразованию Фурье для получения данных энергетического спектра. Потом система определяет, в каких каналах передачи сигналов имеют место передачи, и запоминает результаты. Далее индекс времени устанавливается в исходное положение, потом система устанавливает ввод "В" коррелятора для приема данных от другой сотовой станции, оставляя ввод "А" неизменным. Затем система ждет, пока закончит работы коррелятор, и после этого запоминает результаты корреляции. Потом система определяет, есть ли сотовая станция "В", данные для которой еще не обработаны. Если есть, то процесс обработки возвращается назад, как показано, для обработки данных от этой сотовой станции. Если нет, то система определяет, принимается ли все еще мощность, если не принимается, то эта часть обработки закончена, если принимается, то индекс времени получает приращение, сигналы канала "В" сотовой станции снова обрабатываются как показано.
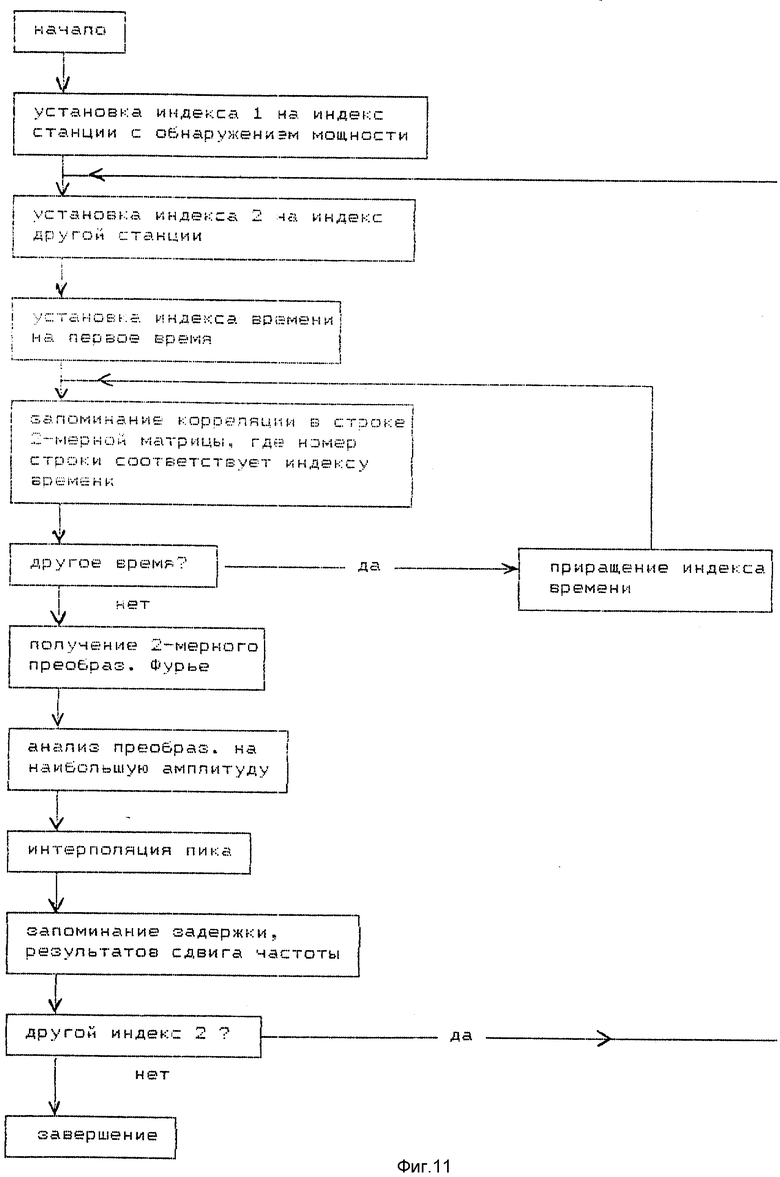
Обработка, производимая для получения данных временной задержки и разности частот, изображена на фиг. 11. Система сначала устанавливает первый индекс как индекс станции, на которой обнаружена принимаемая мощность. После этого устанавливается второй индекс для другой станции. Затем индекс времени устанавливается на значение первого времени. Данные корреляции запоминаются затем в строке двухмерной матрицы, где номер строки соответствует индексу времени. После этого система определяет, имеется ли еще одна временная выборка, подлежащая обработке, если да, то индекс времени получает приращение и обработка возвращается назад как показано. Если нет, то данные в двухмерной матрице подвергаются преобразованию Фурье. Преобразованные данные затем анализируются для обнаружения самой высокой амплитуды. Затем для определения пика преобразованных данных выполняется интерполяция. Результаты временной задержки и разности частот после этого запоминаются. Затем система определяет, следует ли давать приращение второму индексу, и если да, то обработка возвращается назад как показано.
На фиг. 12-14 изображена процедура оценки местонахождения. Как показано на фиг. 12, система сначала вызывает полученные задержки и частоты. Затем вызывается информация о соответствующем телефоне. Далее широта и долгота устанавливаются на исходные значения широты и долготы. Имея исходные значения, система затем вычисляет теоретические величины задержек, учитывая при этом известные смещения станции, если таковые имеют место. Система затем получает сумму квадратов полученных задержек минус вычисленные задержки. Это получает обозначение "Х". Система затем определяет, является ли Х наименьшим из полученных до настоящего момента. Если нет, то обработка возвращается назад, как показано, для приращения исходного значения долготы. Если это - наименьший Х, то широта запоминается в "BEST LAT" (оптимальная широта), а долгота запоминается в "BEST LON" (оптимальная долгота). Система затем определяет, следует ли проверять другую широту и долготу. Если нет, то система выполняет этап итерации линеаризированных взвешенных наименьших квадратов, начиная с BEST LAT и BEST LON для определения величин коррекции LAT CORRECTION и LON CORRECTION.
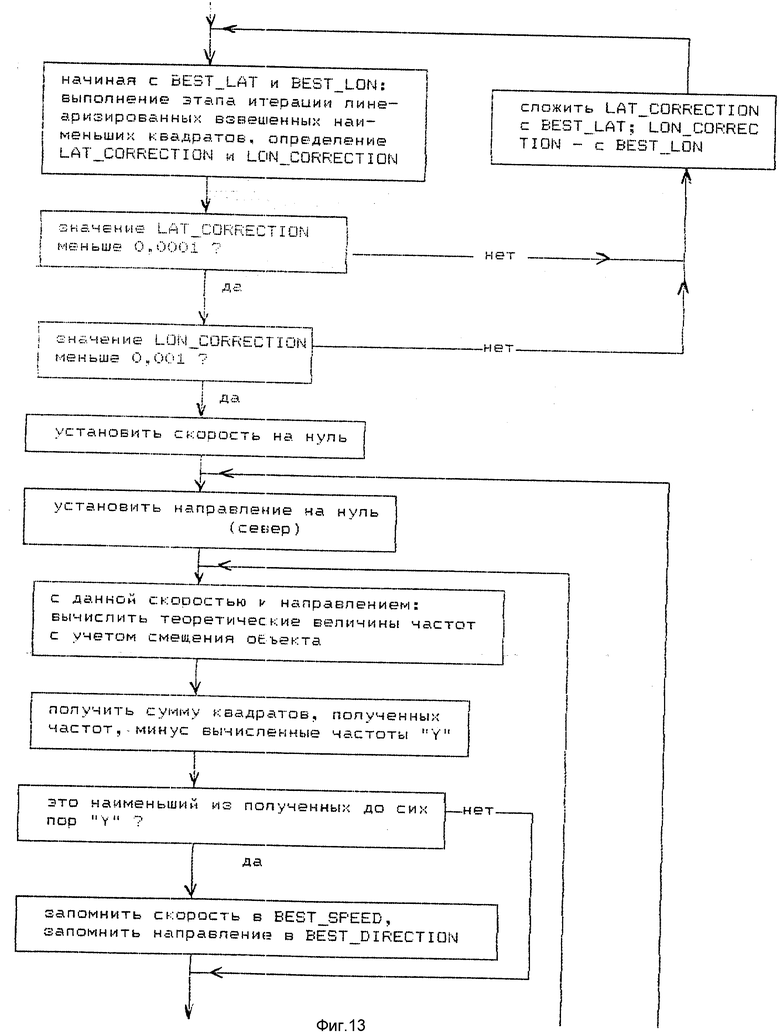
Как показано на фиг. 13, процедура определения местонахождения продолжается следующим определением: меньше ли 0.0001 град. значение LAT CORRECION. Подобным же образом система определяет, меньше ли 0.0001 град. LON CORRECTION. Если одна из этих проверок дает отрицательный результат, то величина LAT CORRECTION прибавляется к BEST LAT, а величина LON CОRRECTION прибавляется к BEST LON, и обработка данных переходит назад для выполнения одного этапа итерации линеаризированных взвешенных наименьших квадратов (фиг. 12). Если значения LAT CORRECTION и LON CORRECCION менее 0,0001, то система приступает к вычислению скорости, устанавливая переменную скорость и переменную направления на ноль (т.е. на север). Имея эти исходные значения скорости и направления, система вычисляет теоретические значения частот, при этом учитывая смещение объекта. Затем система определяет сумму квадратов полученных частот минус вычисленных частот. Эта сумма обозначается символом "Y". После этого система определяет, является ли эта величина "Y" наименьшей из числа до сих пор полученных. Если да, то скорость запоминается в BEST SPEED (оптимальная скорость), а направление запоминается BEST DIRECТION (оптимальное направление). После этого система определяет, следует ли проверять еще одно направление. Если да, то направление получает приращение и обработка данных переходит назад, как показано. Аналогично система определяет, следует ли проверять еще одну скорость, и если да, то скорость получает приращение и обработка переходит назад как показано. Если система принимает решение не проверять еще одно направление и еще одну скорость, то она выполняет вычисление линеаризированных взвешенных наименьших квадратов, начиная с BEST SPEED и BEST DIRECTION, чтобы определить величины коррекции SPEED CORRECTION и DIRECTION CORRECTION. Далее система определяет, меньше ли значение SPREED CORRECTION установленной величины, например, одна миля (1852 м) в час. Если да, то система определяет, меньше ли 1 градуса значение DIRECTION CORRECTION. Если ответ какой-либо из этих проверок будет утвердительным, то система прибавляет SPEED CORRECTION к BEST SPREED и прибавляет DIRECTION CORRECTION к BEST CORRECTION, обработка данных переходит назад для выполнения еще одного вычисления линеаризированных взвешенных наименьших квадратов. Если SPEED CORRECTION менее 1 мили (1852 м) в час, а DIRECTION CORRECTION меньше 1 град, то система выводит информацию о телефоне, BEST LAT, BEST LON, BEST SPREED и BEST DIRECTION.
Области применения
Раскрытое в настоящем списании изобретение может найти полезное коммерческое применение в различных областях, например, кроме основной функции слежения за местонахождением мобильного сотового телефона, данное изобретение может использоваться для того, чтобы предлагать абонентам тарифы оплаты за услуги, изменяемые в зависимости от местонахождения, с которого делался телефонный вызов. Как показано на фиг.15, лента с данными местонахождения, на которой содержится хронологическая запись сведений о местонахождениях сотовых телефонов абонентов, может объединятья с лентой данных счетов на оплату создания ленты модифицированных данных счетов, содержащей данные, указывающие стоимость каждого телефонного вызова, сделанного сотовыми телефонами в течение определенного периода времени. Эта стоимость определяется на основе одного или нескольких заранее определенных тарифов. Модифицированные данные счетов основываются на разных тарифах для вызовов, сделанных с некоторых определенных местонахождений. Например, система может использовать более низкий тариф для телефонных вызовов, сделанных из дома пользователя или с места его работы.
Изобретение можно также использовать для оказания помощи в чрезвычайных ситуациях, например, в ответ на звонок по номеру "911". В этом случае применения система определения местоположения включает в себя средство автоматической отправки информации о местонахождении на специальную приемную станцию в ответ на прием от сотового телефона сигнала "911".
Кроме того, изобретение можно использовать в связи с тревожной сигнализацией. В этом случае применения предусматривается средство текущего местонахождения данного телефона с определенным диапазоном местонахождений и для "объявления тревоги", когда текущее местонахождение вышло за пределы предписанного диапазона.
Еще одно применение связано с обнаружением отсутствия передач сигналов данным телефоном и формированием в ответ на это автоматического поискового вызова этого телефона, чтобы дать ему команду осуществить передачу сигнала. Это дает системе возможность определить местоположение телефона, который не зарегистрирован в сотовой систем. Этот признак мог бы быть использован, например, для подачи сигнала "тревоги" абонентам на удаленных позициях.
И еще применение связано с определением времени прибытия данного телефона в определенное место. Это можно использовать, например, в системе общественного транспорта для хронометража движения автобусов по установленным маршрутам. В этом аспекте возможны также многие другие применения.
Объем данного изобретения не ограничивается раскрытыми здесь предпочтительными вариантами его осуществления. Например, нет необходимости, чтобы все или даже некоторые системы сотовых станций размещались совместно с действующими сотовыми станциями ассоциированной с ними системы сотовой телефонной связи. Более того, кроме линии связи Т1, можно использовать другие линии связи для взаимосвязи систем сотовых станций с системой центральной станции. Кроме того, приемник сигналов хронирования не обязательно должен быть приемником глобальной спутниковой системы местоопределения. Для специалистов в данной области очевидным является другое средство обеспечения общего сигнала хронирования всем системам сотовых станций. Данное изобретение может также использоваться в связи со многими случаями применения, здесь конкретно не упомянутыми, в том числе возвращение угнанных автомобилей, управление парком транспортных средств единого подчинения, диагностика сотовой системы, управление движением на шоссе. Соответственно за исключением возможных конкретных ограничений объем защиты излагаемой ниже формулы изобретения не подразумевает ограничения его описанными выше примерами.








Система определения местоположения сотового телефона для автоматической регистрации местоположения одного или нескольких мобильных сотовых телефонов содержит три или более систем (12) сотовых станций. Каждая система сотовой станции расположена на сотовой станции системы сотовой телефонной связи. Каждая система сотовой станции включает в себя антенну, которая может быть установлена на той же вышке или здании, на которых установлена антенна, используемая системой сотовой телефонной связи, и оборудование, которое может быть размещено в помещении для оборудования соответствующей сотовой станции. Система сотовой станции связана линиями (14) связи Т1 с центральной станцией (16). Центральная станция может размещаться совместно с коммутатором мобильных телефонов системы сотовой телефонной связи. Центральная станция (16), кроме того, связана с базой данных (20), которая может находиться на удаленном от центральной станции месте и к которой может быть обеспечен доступ для абонентов. 3 с. и 42 з.п. ф-лы. 15 ил.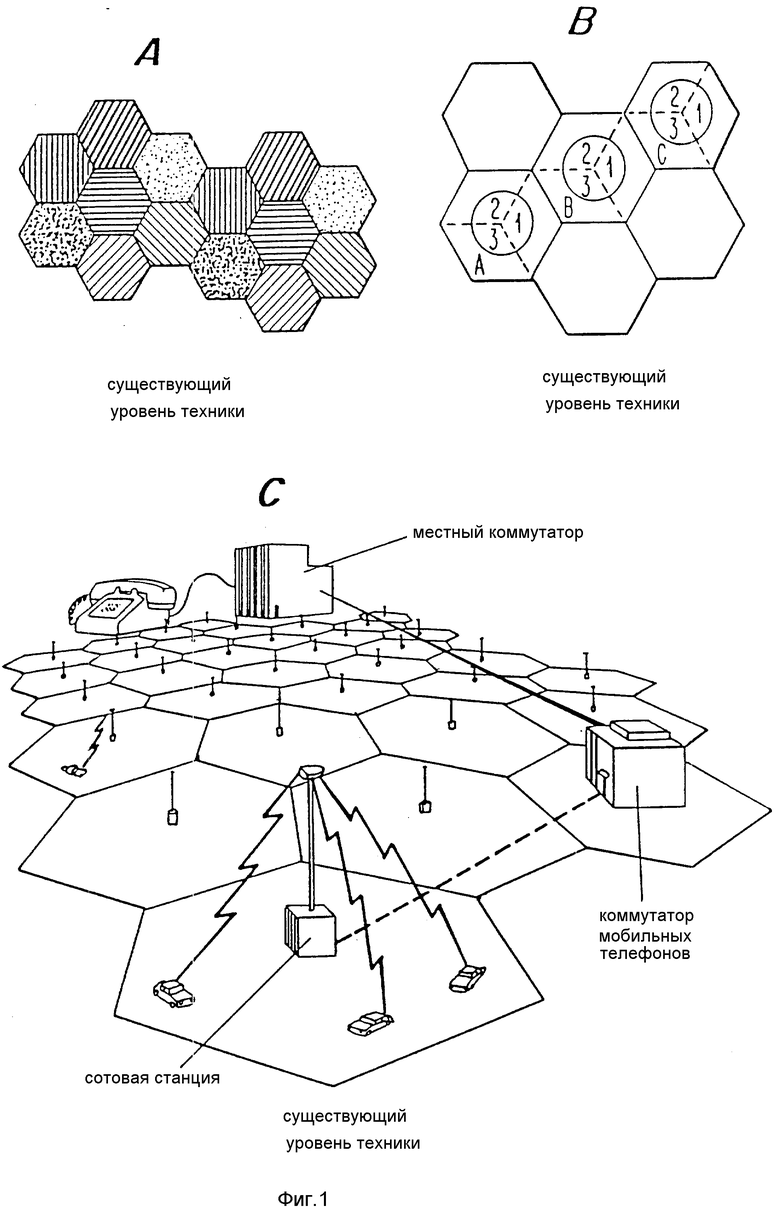
РНК = [Q1 2 (задержка Т1 2 - задержка O1 2)2 +
Q1 3 (задержка Т1 3 - задержка O1 3)2 + ... +
Qх у (задержка Тх у - задержка Oх у)2],
где Т1 2, задержка Т1 3, ... , задержка Тх у - теоретические значения задержек между сотовыми станциями, указанными индексами 12, 13, ... , ху;
задержка O1 2, задержка O1 3, ... , задержка Oх у - полученные задержки между сотовыми станциями, указанными индексами 12, 13, ..., ху;
Q1 2, Q1 3, ... , Qх у - коэффициенты качества для измерения задержки между сотовыми станциями, указанными индексами 12, 13, ... ху, определяемые оценкой влияния многолучевого распространения или иных аномалий на данное измерение задержки.
РНК = [Q1 2 (задержка Т1 2 - задержка О1 2)2 +
Q1 3 (задержка Т1 3 - задержка О1 3)2 + ... +
Qх у (задержка Тх у - задержка Ох у)2] ,
где задержка Т1 2, задержка Т1 3, ... , задержка Тх у - теоретические задержки между сотовыми станциями, указанными индексами 12, 13, ... , ху;
задержка О1 2, задержка О1 3, ... , задержка Ох у - полученные задержки между сотовыми станциями, указанными индексами 12, 13, ... , ху;
Q1 2, Q1 3, ... , Qх у - коэффициенты качества для измерения задержки между сотовыми станциями, указанными индексами 12, 13, ... , ху, определяемые оценкой влияния многолучевого распространения или иных аномалий на данное измерение задержки.
| US, патент, 5208756, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
