В широком смысле настоящее изобретение относится к способу определения местонахождения удаленного объекта. Если говорить более точно, то настоящее изобретение относится к способу применения системы радиосвязи для определения местонахождения устройства определения положения (PDU) и для сообщения данных местонахождения в службу текущего наблюдения.
Во многих случаях необходимо определять местонахождения различных объектов, находящихся на большом расстоянии. Например, ученым и управляющим, которые занимаются дикими или домашними животными, зачастую нужно знать места их нахождения. Далее, управляющим парками - автомобилей, грузовиков, железнодорожных вагонов, самолетов или судов - нужно знать о местонахождении их перевозочных средств. В некоторых случаях время от времени нужно на расстоянии определять положение воздушных шаров, буев и иных платформ. Обычно о месте нахождения таких объектов сообщается - по мере надобности - в службу текущего наблюдения за удаленными объектами.
Способ определения местонахождения удаленных объектов реализуется при помощи двух основных операций: время от времени определяется местонахождение объекта, а характеризующие это положение данные передаются службе текущего наблюдения.
Обычно применение систем определения местонахождения удаленных объектов вынуждает их пользователей идти на трудные компромиссы. Например, в настоящее время исследователи пользуются спутниковой системой определения местонахождения, которая работает под управление французского национального центра космических исследований (CNES), NASA и NOAA. При этом на наблюдаемых объектах размещаются передатчики, а совместимые с ними приемники - на одном или двух орбитальных спутниках. На спутниках производится запись переданных сигналов, которые они принимают. Затем характеризующая эти сигналы информация передается на станцию наземной обработки для расчета доплеровского сдвига частоты, что и позволяет определить местонахождения объектов.
Хотя такая система и может определить положение очень далеко находящегося объекта, ее применение стоит дорого, она недостаточно гибкая и ненадежная. Кроме того, ею пользуются только для научных исследований или при экспериментальном слежении, но не для коммерческих целей. Поэтому удовлетворяется лишь малая часть тех запросов, которые имеются для определения местонахождения удаленных объектов.
Надежность такой обычной системы обусловлена, по меньшей мере частично, тем, что передатчики используются далеко не оптимально, потребляя при этом слишком много электроэнергии и сокращая срок службы передатчика. Кроме того, способность лишь одного или двух спутников принимать сигналы передатчика и способность наземной обработки точно определить местонахождение передатчика в лучшем случае сомнительны.
Искусственные спутники могут следить только за теми передатчиками, которые размещены на наземных следах траекторий их орбит, причем для точного определения местонахождения объекта нужно, чтобы сигнал передатчика спутник принимал в течение примерно 20 минут. Кроме того, станции наземной обработки зачастую нужно несколько недель для передачи данных о местонахождении объекта в службу текущего наблюдения. А к тому времени, когда эта служба определит местонахождение объекта, эта информация устареет.
Негибкость работы такой системы обусловлена, по крайней мере частично, ее неспособностью управлять работой передатчика после выхода из зоны слежения и ограниченным сроком службы батарей передатчика. Часто из-за истощения источников питания передатчиков они могут работать всего лишь несколько недель. Высокая стоимость такой связи, по меньшей мере частично, обусловлена сложной инфраструктурой системы, которая должна обеспечивать определение местонахождения удаленного объекта.
Были предложены и другие системы определения местонахождения удаленных объектов. Так, например, с помощью одной системы предлагается подключать приемник LORAN (импульсная разностнодальномерная радионавигационная система) к обычным сотовым радиотелефонам. Надежность этой системы может несколько улучшить работу упомянутой выше спутниковой системы связи, но в ряде случаев надежность может и ухудшиться. Например, эта и ей подобные системы будут работоспособными лишь в тех случаях, когда возможен прием сигналов системы LORAN и когда обеспечена обычная сотовая электросвязь.
Такое ограничение исключает возможность применения указанной системы во многих случаях, например при необходимости слежения в широкой зоне или если нужно вести слежение в очень удаленных районах. Кроме того, физические требования к антенне для приема сигналов системы LORAN исключают возможность ее применения в тех случаях, когда физические размеры должны быть малы.
Применение двух различных систем - системы LORAN для определения местонахождения объекта и системы сотовой электросвязи - повышает сложность и стоимость этой связи при пропорционально возрастающей ненадежности, массы и потребляемой мощности.
Задачей, положенной в основу настоящего изобретения, является создание улучшенной системы, надежного, гибкого и дешевого способа и/или устройства для определения местонахождения удаленного объекта.
Изобретение дает возможность контролировать потребление мощности для повышения срока службы батарей, позволяет использовать одну инфраструктуру системы связи для передачи сообщений и определения объекта, настоящее изобретение дает возможность получать надежные данные почти в общемировом масштабе.
Поставленная задача решается тем, что в способе определения объекта подвижным устройством, определения положения совместно с системой связи, согласно изобретению осуществляют прием сигнала захвата и сопровождения объекта для получения информации от системы связи, под воздействием этого принятого сигнала устанавливают согласованную связь с системой для определения и передачи сообщения о местонахождении объекта в PDU, при этом согласованная связь осуществляется при передаче сообщений PDU для их приема системой связи.
В дальнейшем изобретение поясняется конкретным вариантом его выполнения со ссылкой на сопровождающие чертежи, на которых
фиг. 1 изображает среду, в которой применяют настоящее изобретение,
фиг. 2 - вид сотовой группы на поверхности земли, связанной со станциями спутниковой радиосвязи, которые используются как узловые точки системы связи,
фиг. 3 - блок-схему устройства определения положения (PDU), работающего в системе связи,
фиг. 4 - блок-схему главной коммутационной станции (CSO), работающей в качестве узловой точки системы связи,
фиг. 5 - блок-схему станции спутниковой радиосвязи,
фиг. 6 - блок-схему операций, выполняемых станцией спутниковой радиосвязи,
фиг. 7 - блок-схему операций, выполняемых PDU в неактивном режиме,
фиг. 8 - блок-схему операций, выполненных PDU в рабочем режиме,
фиг. 9 - блок-схему операций, выполненных PDU в режиме ожидания,
фиг. 10 - данные, которые обнаруживаются элементами запоминающего устройства PDU и хранятся в нем,
фиг. 11 - блок-схему операций, выполненных центром обработки данных при определении положения объекта,
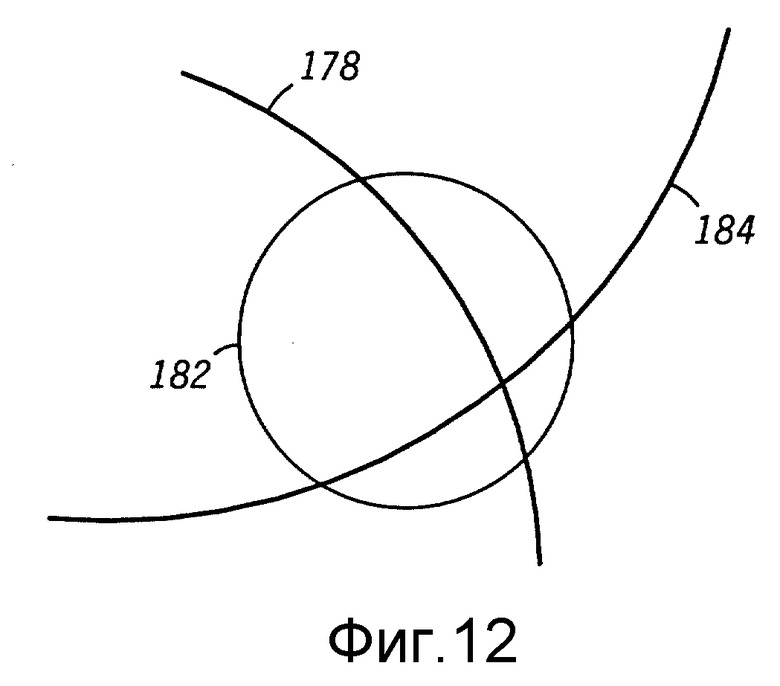
фиг. 12 изображает графическое изображение реализации одного из вариантов способа определения местонахождения PDU.
На фиг. 1 приведена та общая обстановка, в которой используются предпочтительные варианты настоящего изобретения. Окружающая среда 10 (всемирная система спутниковой связи) имеет инфраструктуру в виде спутниковой связи или сеть 12. Эта сеть охватывает весь земной шар при помощи нескольких находящихся над поверхностью земли связанных радиостанций или узловых точек в виде находящихся на своих орбитах искусственных спутников 14.
В сеть 12 входят наземные устройства или узлы, которые поддерживают связь со спутниками 14. Последние имеют связь с несколькими главными коммутационными станциями (CSO) 16 (на фиг. 1 их только две) и с рядом наземных станций управления (GCS) 18 (на фиг. 1 показана одна такая станция).
В предпочтительном варианте настоящего изобретения спутники 14 находятся на почти полярных орбитах 20 недалеко от поверхности земли. В предпочтительном варианте сети 12 используются семь полярных орбит и на каждой из них находится одиннадцать спутников 14 (на фиг. 1 для ясности показаны лишь несколько спутников 14). Орбиты 20 и спутники 14 расположены вокруг поверхности земли.
В предпочтительном варианте каждая орбита 20 окружает землю на высоте около 765 км. Поскольку эти орбиты 20 относительно низкие, то обеспечивается передача электромагнитных волн почти до линии прямой видимости от любого спутника 14, который в любой момент времени покрывает относительно небольшую поверхность земли. Например, если орбиты спутников 14 находятся на высоте около 765 км, то передаваемые ими сигналы принимаются в зонах с диаметром около 4075 км.
Поскольку орбиты 20 низкоземельные, то относительно земли спутники 14 движутся со скоростью примерно 25000 км/час. Это позволяет спутникам находиться в зоне видимости на поверхности земли примерно 9 минут. Кроме того, при такой высоте по мере приближения и удаления спутников возникает значительный доплеровский сдвиг частоты сигналов, передаваемых между спутниками и станциями на поверхности земли.
Фиг. 1 и все вышесказанное характеризует предпочтительную форму орбит спутников 14. Но специалистам этой области техники известно, что узловые точки связи в виде спутников 14 не обязательно располагать именно так, как здесь указано. Например, такие узловые точки могут находиться на поверхности земли или на орбитах, отличных от здесь описанных. Кроме того, точное количество узловых точек в разных сетях может быть различное.
На поверхности земли от станции CSO 16 сети 12 обычно размещаются согласно геополитическим границам. Наземные станции GCS 18 лучше всего располагать в крайних северных или южных широтах. Здесь сходимость орбит 20 способствует тому, что много спутников 14 располагаются на линии прямой видимости, наблюдаемой из одной точки на поверхности земли, чего нельзя сказать о более низких широтах.
Желательно, чтобы работали примерно четыре станции GCS 18. Это позволит всем спутникам 14 данного созвездия, находящимся в каких-то точках своих орбит 20, выйти в зону прямой видимости связанных с ними станций GCS 18. Ничто не мешает станциям CSO 16 и наземным станциям GCS 18 их совместному размещению на поверхности земли. Но отметим, что станции CSO 16 выполняют функции, отличные от функций станций GCS 18.
Обычно станции CSO 16 в сети 12 работают как узловые точки связи. Другие наземные системы связи, например всемирная переключаемая сеть линий связи общего пользования (PSTN) 22, связаны со станциями CSO 16 и через них могут подключаться к сети 12. Станции GCS 18 обычно выполняют операции телеметрирования, слежения и управления (TT&C), данные которых необходимы созвездию спутников 14.
Сеть 12 обеспечивает передачу информации от одной точки в другую. В частности, информация может передаваться между смежными спутниками 14 при помощи двусторонней радиосвязи 24. Информация может передаваться и GCS 18, а также передаваться спутнику 14 по каналу наземной радиосвязи 26.
Находящееся в любой точке земли любое устройство электросвязи при помощи локальной PSTN 22 потенциально может воспользоваться сетью 12 для передачи информации. Такие устройства электросвязи имеют снабженный модемом персональный компьютер (не показан), находящийся в помещении службы текущего наблюдения (MO) 28. Специалистам этой области техники известно, что MO 28 может находиться в любом месте и тем не менее через PSTN 22 будет иметь доступ к сети 12.
Всемирная система спутниковой связи 10 включает в себя любое количество, возможно несколько миллионов, абонентских аппаратов для радиосвязи 30. Аппараты 30 со спутниками 14 сети 12 связаны непосредственно при помощи каналов радиосвязи 32 абонентских аппаратов. Аппараты 30 могут находиться в любой точке земли или в атмосфере над землей.
Благодаря такому расположению созвездия спутников 14, которое предложено в предпочтительном варианте, по меньшей мере один спутник 14 все время будет находиться в зоне видимости каждой точки земной поверхности. При этом с помощью сети 12 через созвездие спутников 14 можно устанавливать связь между двумя аппаратами 30, между любым аппаратом 30 и службой текущего наблюдения 28 или между MO 28 и любым другим устройством, подключенным к PSTN через всемирную систему.
Каналы радиосвязи 32, которые спутниками 14 используются для связи с любым и со всеми аппаратами 30, занимают лишь небольшую часть электромагнитного спектра. Точные значения этого спектра для данного изобретения роли не играют и могут в разных сетях быть различными. В настоящем изобретении этот спектр делится на отдельные части, которые далее будут называться группами каналов. Точный способ определения такого спектра для настоящего изобретения также значения не имеет.
Спектр можно разделить на отдельные частотные диапазоны, отдельные временные интервалы, использовать дискретный способ кодирования или использовать все это в какой-то комбинации. При этом желательно, чтобы каждая такая отдельная группа каналов была бы ортогональной (не смешанной) по отношению к другим группам каналов. Иначе говоря, это позволяет в любом месте одновременно пользоваться каждой группой каналов связи без заметных помех между этими группами.
На фиг. 2 приведена схема размещения сотовых антенн, работающих со спутниками 14. Каждый спутник 14 имеет матрицу (не показана) направленных антенн. Каждая такая матрица спутника 14 направляет несколько дискретных излучений антенн на земную поверхность под различными углами. На фиг. 2 приведена группа наземных ячеек 34, которые спутники 14 покрывают совместно.
Зона определенной площади 36 (на фиг. 2 она ограничена двойной линией) - это та поверхность, которая покрывается излучением матрицы направленных антенн спутника 14. Ячейки 34, находящиеся вне зоны 36, покрываются излучением матриц антенн других спутников 14.
Точное число групп каналов, между которыми распределяется используемый спутниками 14 спектр частот, в настоящем изобретении большого значения не имеет. На фиг. 2 показано примерное распределение группы каналов по ячейкам 34 согласно настоящему изобретению и в соответствии с распределением спектра между семью отдельными группами каналов.
На этом чертеже показаны семь отдельных групп каналов, обозначенных буквами "A", "B", "C", "D", "E", "F" и "G". Специалистам этой области техники известно, что можно использовать и другое число групп каналов, например 12. Если используется другое число, то результирующее распределение групп каналов по ячейкам 34 будет отличаться от того, что показано на фиг. 2.
Специалистам в этой области техники известно, что в каждую группу каналов может входить как один, так и любое число ортогональных каналов. Как видно на фиг. 2, распределение групп каналов по ячейкам 34 позволяет ограниченный спектр повторно использовать для связи с географически разнесенными ячейками 34. Говоря иначе, неортогональные группы каналов обеспечивают одновременную связь без помех, так как те ячейки 34, которые покрываются группами неортогональных каналов, между собой разнесены.
Кроме того, каждый аппарат 30 может работать с любой отдельной группой каналов. При этом работой каждой такой группы, которая в любой момент времени может быть использована любым абонентским аппаратом 30, управляет сеть 12.
Вновь обратимся к фиг. 1, на которой видно, что в соответствии с предпочтительными вариантами настоящего изобретения используются по меньшей мере два аппарата 30 разного типа. Речевой абонентский аппарат (VSU) 38 в основном предназначен для связи, т. е. для передачи речевых сообщений, что во многом похоже на обычную телефонную связь и на связь при помощи сотовой радиотелефонии. Специалистам в этой области техники известно, что ничто не мешает VSU 38 передавать информацию так, как это обычно делается при помощи обычной наземной электросвязи.
Поскольку ничто не препятствует размещению любого отдельного VSU 38 в любом месте земли, то эти аппараты 38 в основном находятся в населенных пунктах.
Устройство определения положения (PDU) 40 - это другой тип абонентского аппарата 30. Устройства PDU 40 в основном предназначены для передачи данных и для работы без вмешательства человека. В частности, данные устройства PDU 40 компануются так, чтобы передавать описание местонахождения объекта для PDU 40 и другие данные - сведения об окружающей среде и не относящуюся к местонахождению объекта информацию.
Поскольку нет необходимости размещать в каком-то определенном месте земли хотя бы одно PDU 40, то их в основном располагают в ненаселенных районах. Таким образом, инфраструктура коммуникационной сети 12 обеспечивает связь в населенных и ненаселенных районах, а полная стоимость такой инфраструктуры, необходимой для обеспечения обоих видов связи, значительно снижается.
Устройства PDU 40 предназначены для непосредственного размещения на подвижных объектах. Например, PDU 40 можно закрепить на диком или домашнем, морском или сухопутном животном, на метеорологических зондах, на океанских буях, железнодорожных вагонах, зафрактованных грузовых автомобилях или контейнерах, самолетах, судах, автомобилях и т.п. Все эти объекты регулярно находятся в ненаселенных зонах или по меньшей мере перемещаются через такие зоны.
Как выше отмечалось, находящаяся вдали служба текущего наблюдения (МО) 28 может принимать информацию о местонахождении объекта и другие относящиеся к объекту данные благодаря закрепленному на нем PDU 40. В соответствии с предпочтительными вариантами настоящего изобретения эта служба дистанционного определения местонахождения удаленного объекта имеет очень высокую надежность, работает в общемировом масштабе, достаточно гибкая и может быть реализована при разумных затратах.
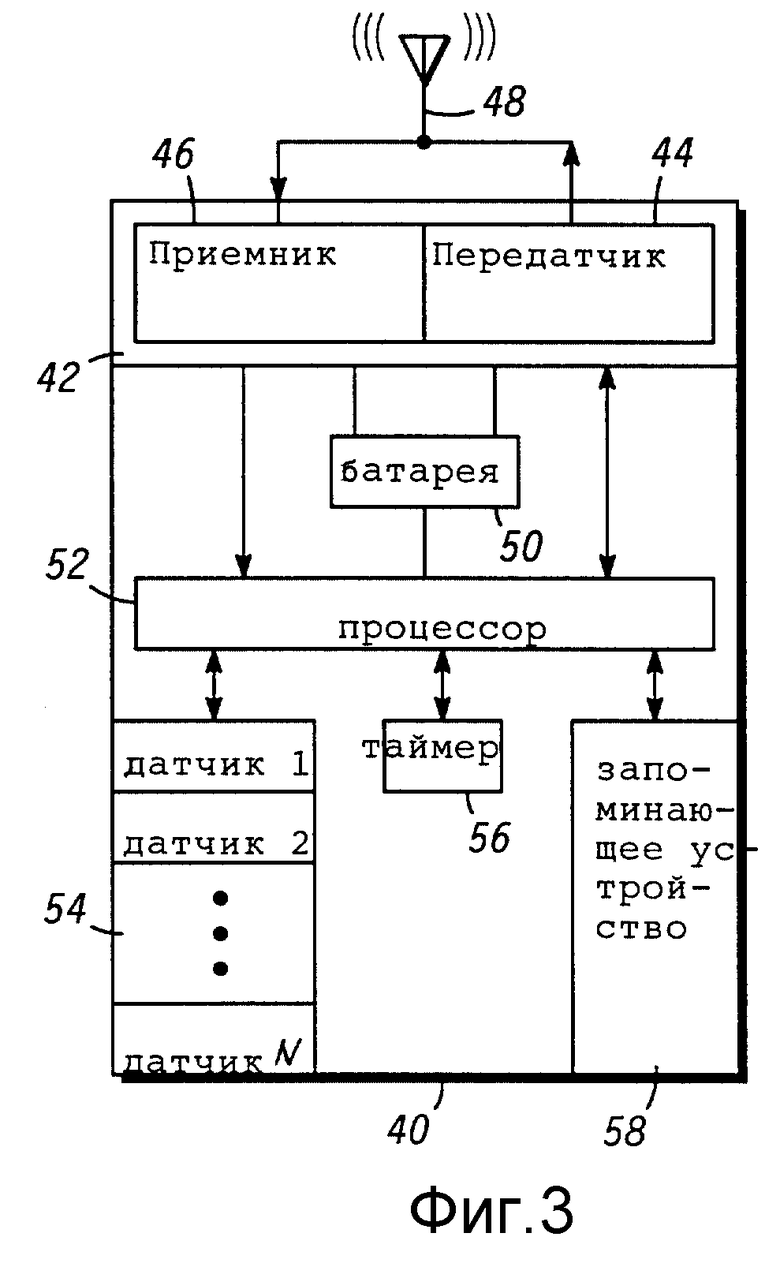
На фиг. 3 приведена блок-схема PDU 40. Желательно, чтобы все устройства PDU 40, применяемые во всемирной системе спутниковой связи 10 (см. фиг. 1), в основном соответствовали блок-схеме на фиг. 3.
PDU 40 содержит приемопередатчик 42 коммуникационной сети, в котором имеются передатчик 44 и приемник 46. Передатчик 44 и приемник 46 соответственно передают и принимают сигналы в формате, совместимом с работой спутников 14 и канала 32 (см. фиг. 1). Эти сигналы передают информацию, которая позволяет PDU 40 обмениваться данными с соседним спутником 14. При помощи этого спутника 14 PDU 40 обменивается данными и с любой другой узловой точкой сети 12, а также с МО 28 (см. фиг. 1). Желательно, чтобы передатчик 44 и приемник 46 пользовались одной антенной 48.
Передатчик 44 и приемник 46 подключены к батарейному отсеку 50 и к процессору 52. Последний также подключен к отсеку 50, чтобы последовательно управлять подачей электропитания в передатчик 44, приемник 46 и в другие узлы PDU 40. Процессор 52 подключен и к отсеку с датчиками 54, к таймеру 56 и к запоминающему устройству 58.
Процессор 52 использует информацию датчиков отсека 54 для контроля обстановки около PDU 40, в том числе и параметров объекта, к которому может быть подключен данный PDU 40. Например, отсек с датчиками 54 дает процессору 52 информацию о температуре, давлении, биении сердца, частоте дыхания, об уровне окружающей освещенности, влажности и т.п. С помощью таймера 56 процессор 52 производит обработку текущих данных и времени.
В запоминающем устройстве 58 хранятся данные, которые для процессора 52 являются командами и которые, после исполнения их процессором 52, переключают PDU 40 на выполнение описанных ниже процедур. В запоминающем устройстве 58 хранятся также переменные, таблицы и базы данных, которые используются при работе PDU 40.
VSU 38 (см. фиг. 1) может соответствовать блок-схеме, приведенной на фиг. 3. Но аппарат 38 может не иметь отсека с датчиками 54 и иметь устройство ввода-вывода, которое кроме всего прочего преобразует звуковые сигналы в электрические и наоборот. Это устройство позволяет также пользователю нажатием клавиш вводить данные, которые сообщают VSU 38 о подлинности той стороны, которую вызывают.
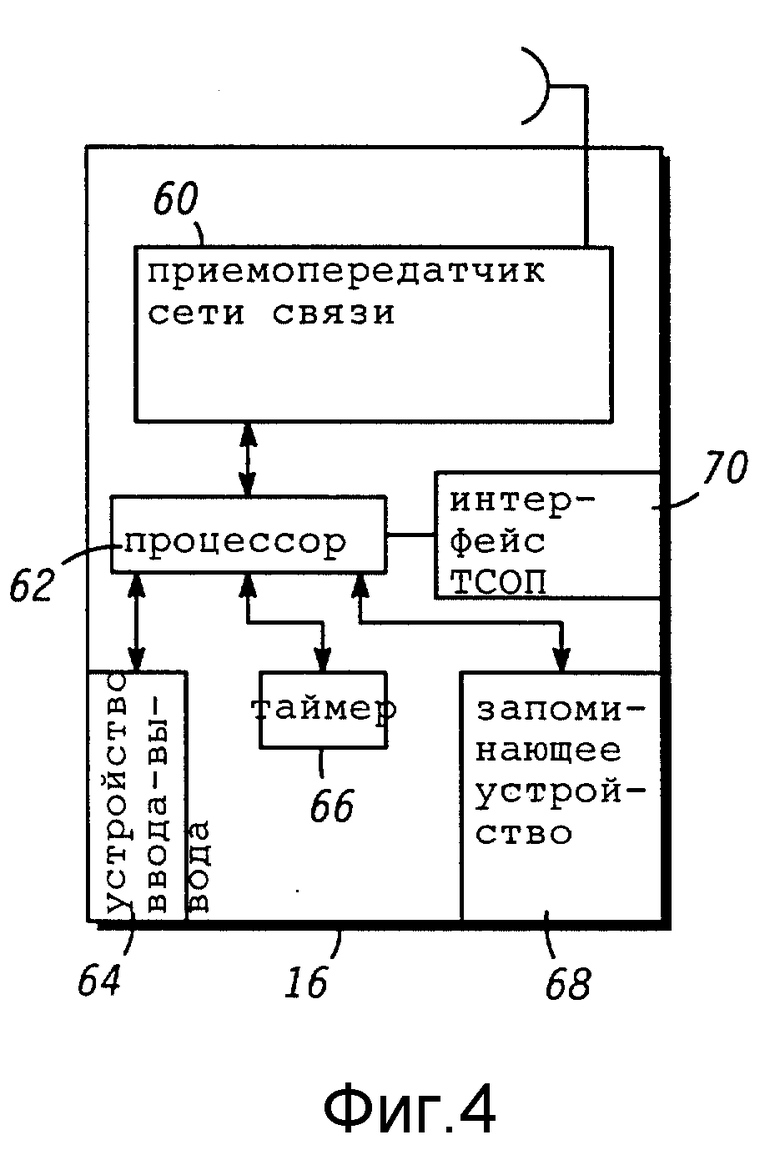
На фиг. 4 приведена блок-схема CSO 16. Желательно, чтобы все станции CSO 16, применяемые во всемирной системе спутниковой связи 10 (см. фиг. 1), в основном соответствовали блок-схеме на фиг. 4.
CSO 16 содержит приемопередатчик 60, который передает и принимает сигналы в формате, совместимом с работой спутников 14 и канала наземной связи 26 (см. фиг. 1). Эти сигналы передают информацию, которая позволяет CSO 16 обмениваться данными с соседним спутником 14, с абонентскими аппаратами 30 (см. фиг. 1), которые в данный момент обслуживаются станциями CSO 16, с другими станциями CSO 16 (что позволяет данному CSO 16 кооперироваться для обеспечения вызова) или с любыми другими узловыми точками сети 12.
Приемопередатчик 60 подключен к процессору 62. Последний подключен также к устройству ввода-вывода 64, к таймеру 66, к запоминающему устройству 68 и интерфейсу 70 PSТN. Устройство ввода-вывода 64 получает информацию от клавишной панели или от других устройств ввода данных и обеспечивает их вывод на дисплеи, печатающие устройства и другие выходные устройства.
Процессор 62 работает вместе с таймером 66 и ведет обработку текущих данных и времени. Запоминающее устройство 68 содержит полупроводниковые, магнитные и другие элементы памяти для хранения данных, которые для процессора 62 являются командами и которые, после исполнения их процессором 62, переключают CSO 16 на выполнение описанных ниже процедур. В запоминающем устройстве 68 хранятся также переменные таблицы и базы данных, которые используются при работе CSO 16. При помощи интерфейса 70 CSO 16 связывается с PSTN 22.
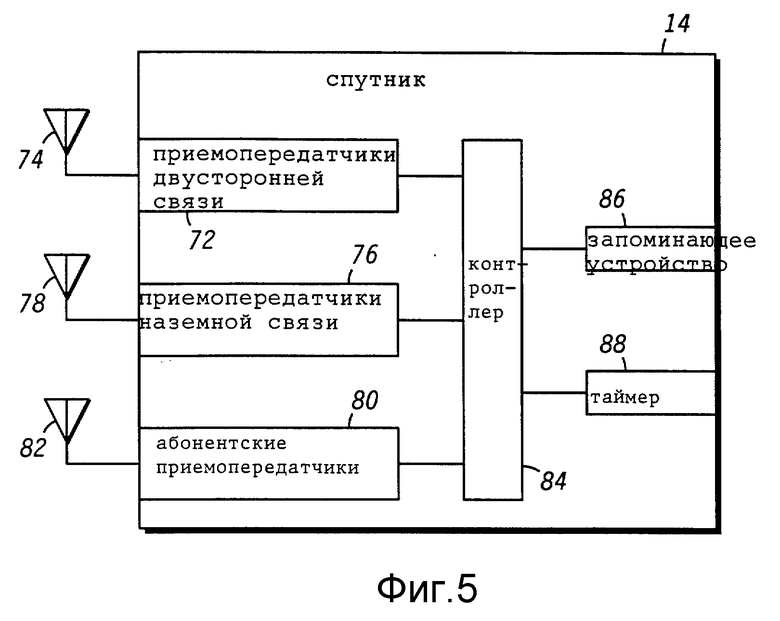
На фиг. 5 приведена блок-схема станции радиосвязи на спутнике 14. Желательно, чтобы все спутники всемирной системы связи 10 (см. фиг. 1) в основном имели блок-схемы, соответствующие приведенной на фиг. 5. На спутнике 14 находятся приемопередатчики 72 двусторонней радиосвязи с соответствующими антеннами 74. Приемопередатчики 72 и антенны 74 обеспечивают работу каналов 24 (см. фиг. 1) двусторонней радиосвязи с ближайшими спутниками 14.
Приемопередатчики 76 каналов наземной связи и соответствующие антенны 78 обеспечивают работу каналов наземной связи 26 (см. фиг. 1). Кроме того, приемопередатчики 80 абонентских аппаратов и соответствующие антенны 82 обслуживают каналы связи 32 абонентов (см. фиг. 1). При работе с каналом 32 обычно каждый спутник 14 одновременно может обслуживать до тысячи и даже более абонентских аппаратов 30 (см. фиг. 1).
Специалистам в этой области техники известно, что антенны 74, 78 и 82 можно использовать как единые многонаправленные антенны или как группы отдельных антенн.
Контроллер 84 связан с каждым приемопередатчиком 72, 76 и 80, а также подключен к запоминающему устройству 86 и таймеру 88. В схеме контроллера 84 могут находиться один или более процессоров. При помощи таймера 88 контроллер 84 производит обработку текущих данных и времени. Обычно таймер 88 время от времени синхронизируется "системным временем", для чего он подключается к станциям GCS 18 (см. фиг. 1). Поэтому все спутники 14 сети 12 одновременно опознают одну и ту же точку почти мгновенно.
Запоминающее устройство 86 хранит данные, которые для контроллера 84 являются командами и которые, после их исполнения контроллером 84, заставляют спутник 14 выполнять те процедуры, о которых сказано ниже. Кроме того, в запоминающем устройства 86 хранятся переменные, таблицы и базы данных, которые используются при работе спутника 14.
На фиг. 6-9 и 11 приведены блок-схемы процедур, которые выполняются при определении местонахождения объекта и для передачи данных местонахождения в соответствии с предпочтительными вариантами настоящего изобретения.
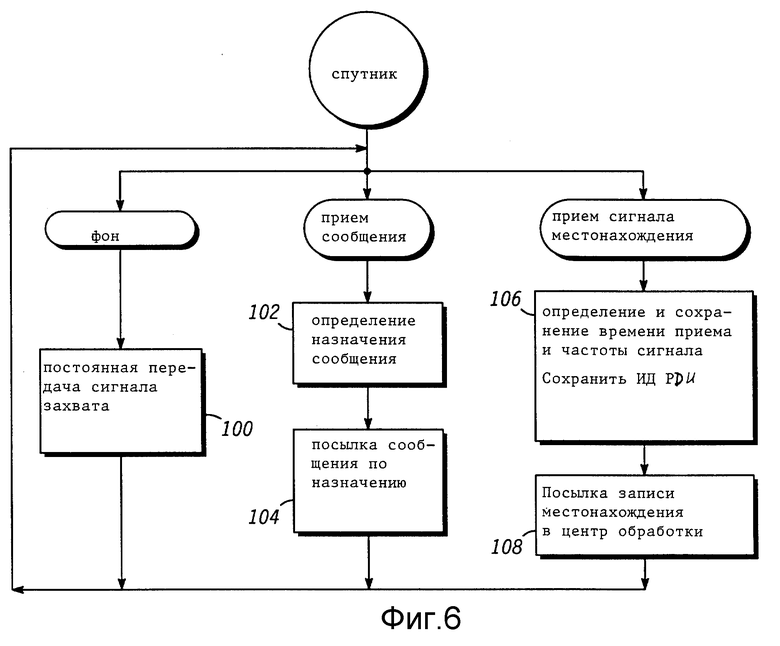
На фиг. 6 приведены операции, которые выполняются спутниками 14 в соответствии с предпочтительными вариантами настоящего изобретения. На фиг. 7-9 приведены операции, которые выполняются устройствами PDU 40, а на фиг. 11 - операции в центре обработки данных, которые в предпочтительном варианте могут выполняться станциями CSO 16.
На фиг. 6 видно, что после подготовительной операции спутники 14 выполняют операцию 100 - передачу сигнала захвата и сопровождения объекта. Этот сигнал непрерывно или с интервалами передается по определенным каналам, входящим в каждую группу каналов. Этот сигнал захвата и сопровождения объекта позволяет устройствам PDU 40 находить способ связи при помощи сети 12, о чем говорится ниже. Кроме того, этот сигнал используется для координации нескольких и одновременных независимых связей при помощи сети 12.
При помощи сигнала захвата и сопровождения объекта в абонентские аппараты 30 передается ограниченный объем данных, например о подлинности спутника 14, передающего этот сигнал, о спутниковой версии системного времени и о подлинности ячейки 34 (см. фиг. 2), к которой направлен сигнал захвата и сопровождения объекта.
В одном из предпочтительных вариантов настоящего изобретения, который здесь назван вариантом определения местонахождения локального объекта, с помощью сигнала захвата и сопровождения объекта можно сообщить географическое положение центра ячейки 34, к которой направлен этот сигнал. Указанный сигнал может содержать группу импульсов местоположения, с помощью которых абонентский аппарат 30 получает информацию, определяющую местонахождение объекта.
Согласно этому варианту определения местонахождения устройства PDU производят определение своих собственных положений или сбор достаточных данных для последующего вычисления их местонахождения в удаленном центре обработки данных, например в MO 28.
В сети 12 спутники 14 в основном работают как ретрансляторы (см. фиг. 1). Иначе говоря, большинство принятых спутниками сообщений ими же повторно передаются. Когда спутники 14 принимают сообщения, они выполняют процедуру приема информации. В нашем случае сообщения могут быть любыми - речевыми, содержащими данные или команды управления непроизводительными операциями. Последние используются для вызова абонента, для превращения вызова, при запросе команды управления, при выписке счета или для других контрольных операций.
На фиг. 6 видно, что операция 102 используется для анализа данных, характеризующих или связанных с приятным сообщением для определения его назначения. После операции 102 с помощью операции 104 производится посылка сообщения по его назначению. При этом происходит запись сообщения в соответствующий буфер (не показан) передатчика, который и передает это сообщение по его назначению.
В другом предпочтительном варианте настоящего изобретения, который здесь назван вариантом определения местонахождения, удаленного объекта, спутники 14 выполняют процедуру приема импульса положения для определения положений устройств PDU 40. В этом варианте определения местонахождения удаленного объекта на спутники 14 устройства PDU 40 передают импульсы положения по определенному расписанию. Поскольку спутники 14 движутся с большой скоростью относительно устройств PDU 40, то последние можно считать почти неподвижными.
При таком движении спутника 14 он может принимать один импульс положения, когда находится в определенной части неба. Другой импульс положения принимается, когда спутник 14 находится совсем в другой части неба. Из-за такого перемещения происходят доплеровский сдвиг частоты принятых импульсов положения и изменение задержки на прохождение принятых импульсов положения. Ниже со ссылками на фиг. 11, 12 показано, что эти временные и доплеровские характеристики позволяют определять положения устройств PDU 40.
Спутники 14 выполняют процедуру приема импульсов положения при каждом их поступлении. С помощью операции 106 определяется время приема и частота сигнала, на которой передавался импульс положения, а характеризующие эти параметры данные вводятся в память. Одновременно производится запись данных, определяющих подлинность устройств PDU 40, посылающих импульсы положения.
Эти данные каждого PDU 40, передающего импульсы положения, вводятся в запись местонахождения. С помощью заключительной операции 108 производится посылка записи местонахождения в центр обработки данных - это желательно, но на обязательно - ближайшей CSO 16 (см. фиг. 1). Соответственно, в варианте определения местонахождения удаленного объекта настоящего изобретения спутники 14 производят измерения и подборку данных, которые используются центром обработки для определения местонахождения объекта.
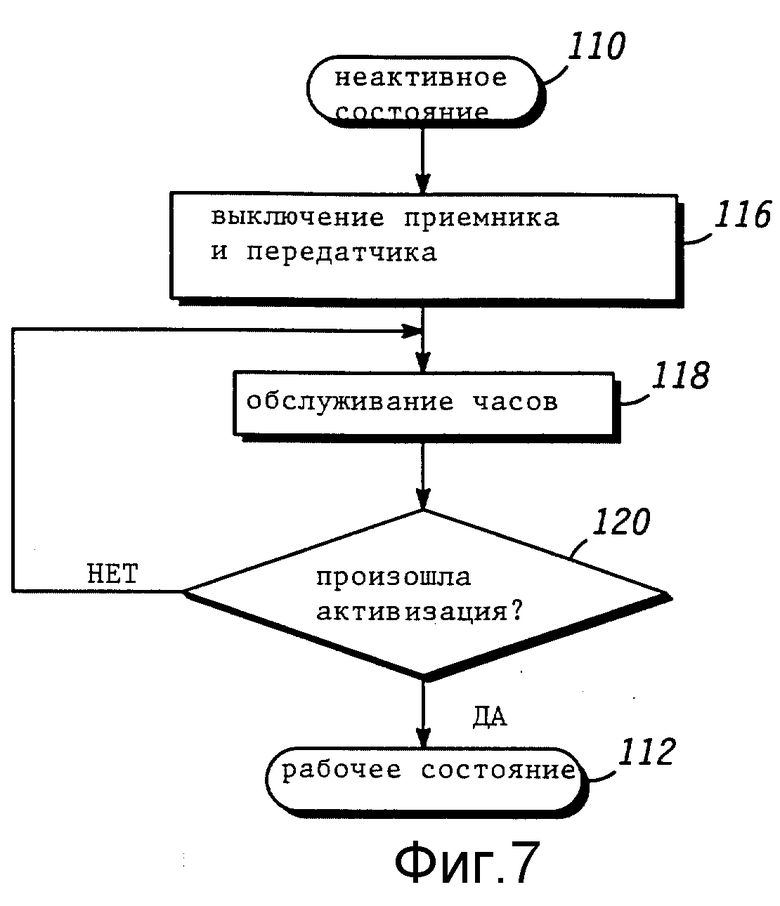
На фиг. 7-9 показаны блок-схемы различных процедур, которые выполняются устройствами PDU 40. В частности, на фиг. 7 приведена блок-схема неактивной процедуры 110, которую PDU 40 выполняет при очень пониженном напряжении питания, т. е. работая в неактивном режиме. На фиг. 8 приведена блок-схема рабочей операции 112, которую PDU 40 выполняет, когда выходит из режима неактивной работы. На фиг. 9 приведена блок-схема процедуры режима ожидания 114, которую PDU 40 выполняет по окончании рабочей процедуры 112 и которая зарегистрирована сетью 12 (см. фиг. 1).
Обратимся к фиг. 7. После начала неактивной процедуры 110 операция 116 производит выключение передатчика 44 и приемника 46 (см. фиг. 3) и всех других обычных схем PDU 40. Специалистам в этой области техники известно, что операция 116 не требует того, чтобы приемник 46, например, был включен до выполнения этой операции. Просто операция 116 обеспечивает выключение передатчика 44.
Операция 116 выполняется тогда, когда процессор 52 посылает соответствующие команды управления в батарейный отсек 50 (см. фиг. 3), чтобы отключить батарейный источник питания от передатчика 44, приемника 46 или от других обычных схем. Желательно, чтобы батарейный источник питания оставался включенным для питания процессора 52 и хотя бы части запоминающего устройства 58. Кроме того, батарейный источник питания остается подключенным по меньшей мере к части отсека с датчиками 54 и/или к таймеру 56. Таким образом, работая в неактивном режиме, PDU 40 получает достаточно мощности и поэтому может само определять момент выхода из неактивного режима работы.
После операции 116 выполняется операция 118, которая обслуживает часы, определяющие текущее время и дату для данного PDU 40. После этого с помощью операции запроса 120 определяется произошло ли действие активизации. Действие активизации - это операция, которая заставляет PDU 40 переключиться из неактивного в рабочий режим. Несколько таких операций можно считать действиями активизации устройства, причем эти действия в основном программируются дистанционно на основании данных, принимаемых по сети 12.
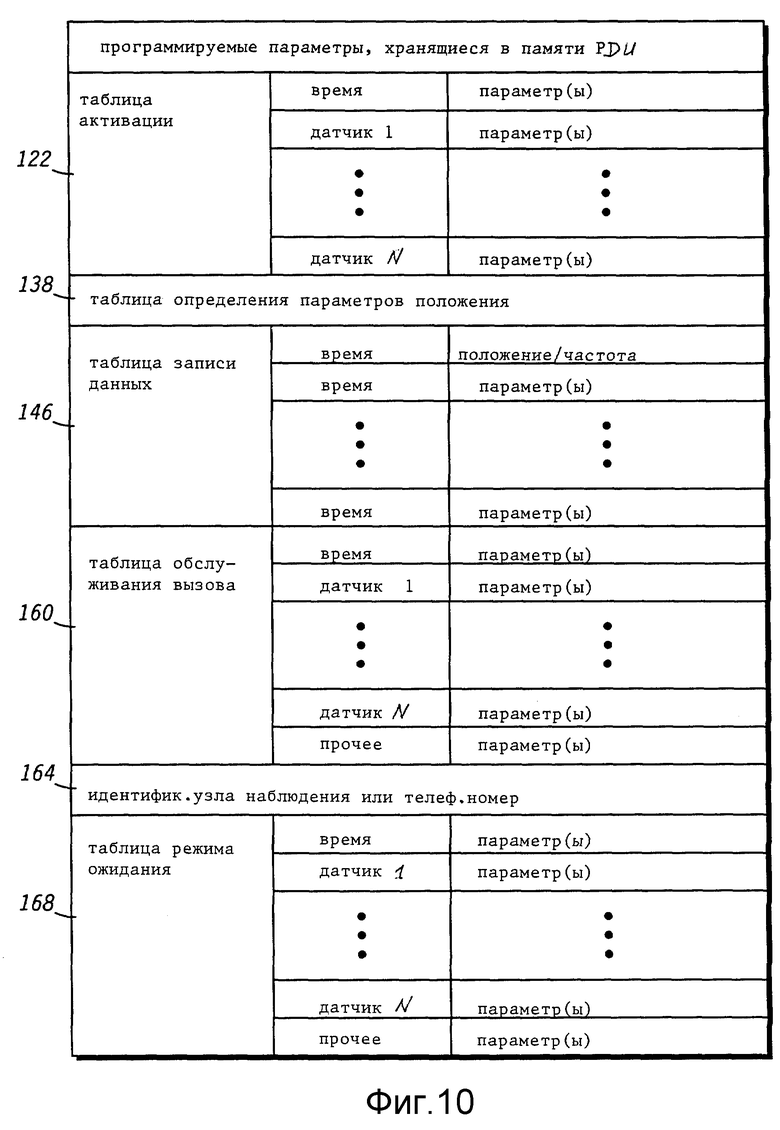
На фиг. 10 приведена схема типичной структуры данных запоминающим устройством 58 PDU 40 (см. фиг. 3). Одной из таких структур является табл. 122 действий активизации. Операция 120 производит сравнение внутренних часов и/или значений, измеренных равными датчиками отсека 54 (см. фиг. 3), с данными табл. 122.
Например, в табл. 122 может быть указано начало активизации устройства в определенное число и время и тогда операция 120 определит указывают ли часы устройства эту конкретную дату и время. Данные табл. 122 могут также указывать, что активизация будет происходить через заданные интервалы времени. С помощью этой таблицы можно ввести операцию, при которой один или несколько датчиков, находящихся в отсеке 54 (см. фиг. 3), будут считывать информацию, необходимую для инициации активизации.
Например, датчик, который сообщает о появлении на поверхности океана морского млекопитающего, можно использовать как средство активизации устройства. Несомненно, что специалистам в этой области техники известно о возможности программирования табл. 122 так, чтобы определенные потенциально возможные действия активизации объединились логическими операциями И или ИЛИ. Вместе с тем табл. 122 можно запрограммировать так, чтобы операция 120 игнорировала другие возможные действия активизации.
Применение табл. 122 обеспечивает гибкость, дешевизну и надежность выполнения операций. Гибкость работы устройства повышается за счет того, что табл. 122 можно запрограммировать на получение любого необходимого уровня определения местонахождения и информационного содержания. Снижение затрат на реализацию данного способа связано с тем, что табл. 122 можно запрограммировать на сокращение объема работы служб определения местонахождения объекта и подготовки соответствующих данных. Тогда ненужные услуги абонентами оплачиваться не будут.
Надежность работы повышается за счет такого программирования устройств PDU 40, при котором они будут находиться в неактивном состоянии как можно дольше. В активное состояние устройства будут включаться только тогда, когда можно будет получить действительно полезные данные или если имеются хорошие возможности для определения и/или передачи данных о местонахождении объекта. Это позволяет повысить срок службы батарейного источника питания PDU 40.
Обратимся к фиг. 7. Если операция установит отсутствие действий активизации, то программа управления вернется к операции 118, а PDU 40 будет оставаться в неактивном режиме. Если же операция 120 определит наличие действий активизации, то программное управление переключает PDU 40 на рабочую процедуру 112.
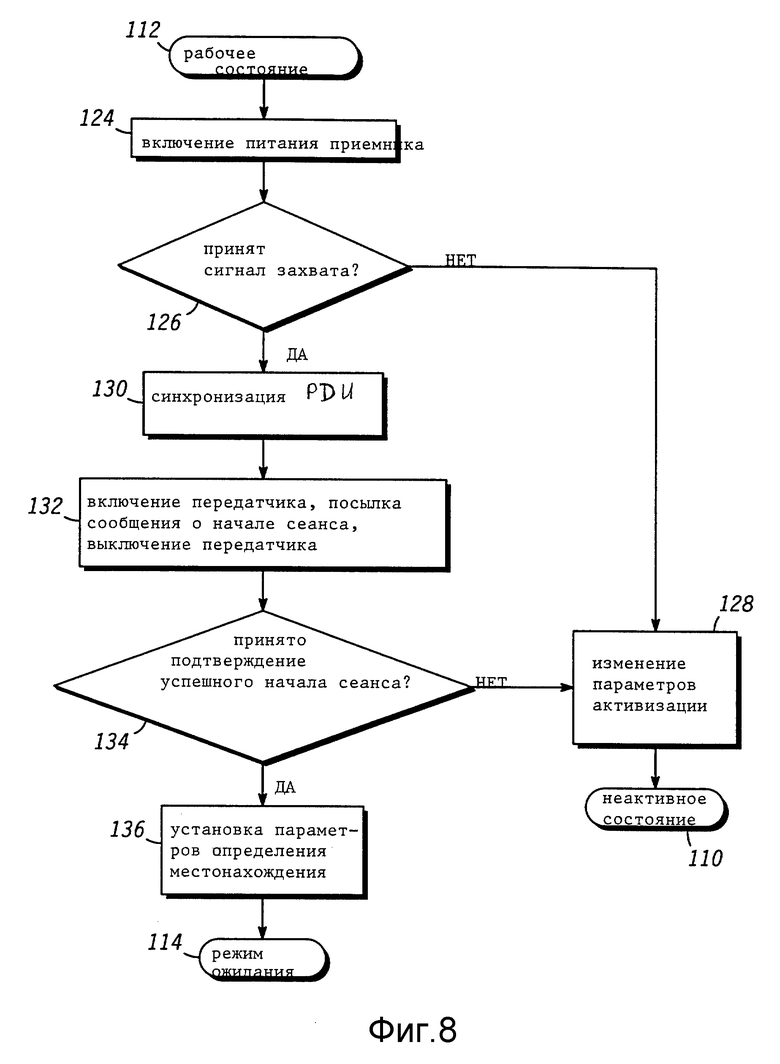
На фиг. 8 приведена блок-схема рабочей процедуры 112. После ввода процедуры 112 выполняется операция 124 включения питания приемника 46 (см. фиг. 3) PDU 40, после чего PDU 40 начнет потреблять электроэнергии больше. Но PDU 40 может начать выполнение операций, которые имеют - весьма вероятно - большое значение для определения местоположения удаленного объекта.
В частности, приемник 46 может начать прием, захват или синхронизироваться сигналом захвата и сопровождения объекта, который передается находящимся на орбите спутником 14 (см. операцию 100 на фиг. 6). Сигнал захвата и сопровождения объекта можно считать принятым, когда PDU 40 начнет считывание действительных данных этого сигнала.
Из-за изменений доплеровской частоты и времени распространения сигнала захвата и сопровождения объекта приемник 46 может в течение некоторого времени вести поиск прежде чем он будет засинхронизирован этим сигналом. Кроме того, приемник 46 может работать как дискриминатор сигналов захвата и сопровождения, связанных с несколькими ячейками 34 (см. фиг. 2).Через некоторый промежуток времени операция запроса 126 установит был ли захвачен сигнал захвата и сопровождения объекта.
PDU 40 может и захватить этот сигнал по одной из ряда причин. Например, это может быть тогда, когда PDU находится под водой, под землей, в здании или около какого-то сооружения, создающего помехи. Если операция 126 установит, что PDU 40 не смогло принять сигнал захвата и сопровождения объекта, то операция 128 изменит параметры действия активизации, запрограммированные в табл. 122. Тогда программное управление вернется к неактивной процедуре 110, о которой говорилось выше со ссылкой на фиг. 7.
Параметры действия активизации можно изменить, например, изменением времени возбуждения, в результате чего через некоторое время PDU 40 будет снова пытаться получить сигнал захвата и сопровождения объекта несколько позже. Это более позднее время или временной интервал между текущей и будущей временными точками можно запрограммировать в табл. 122.
Если сигнал захвата и сопровождения объекта принять не удается, то PDU 40 переключается в неактивный режим, чтобы уменьшить потребление мощности до того момента, когда включиться действие активизации. Новая активизация может (но не обязательно) начинаться в определенные предварительно заданные моменты времени.
Прием сигнала захвата и сопровождения объекта PDU 40 использует как вестник будущего успеха при определении положения объекта и/или передаче сообщений с данными местонахождения в МО 28 (см. фиг. 1). Если принять сигнал захвата и сопровождения не удается, то PDU 40 переключается в неактивный режим для экономии энергии и не продолжает выполнение тех операций, от которых трудно ожидать получение нужной информации.
Если операция 126 установит, что сигнал захвата и сопровождения объекта принят, то PDU 40 устанавливает наличие большой вероятности определения местонахождения и/или передачи данных этого положения. Поэтому операция 130 изменяет параметры приемопередатчика 42 (см. фиг. 3) для синхронизации - или координации - связи с тем спутником 14, чей сигнал захвата и сопровождения был принят.
Происходящая под воздействием принятого сигнала захвата и сопровождения объекта синхронизация позволяет более эффективно использовать частотный спектр, регулируемый сетью 12 (см. фиг. 1). Иначе говоря, благодаря координации связи между спутниками 14 и абонентскими аппаратами 30 (см. фиг. 1) может быть увеличен объем сообщений между спутниками 14. При этом для каждого абонента будет снижена стоимость инфраструктуры связи, которая обеспечивает определение местонахождения объекта и передачу других сообщений.
После операции 130 операция 132 включает передатчик 44 (см. фиг. 3), который в сеть 12 передает сообщение о начале сеанса (см. фиг. 12). Это сообщение в основном содержит специальный идентификационный номер, соответствующий тому PDU 40, который послал сообщение. Сеть 12 и, в частности, ближайшая CSO 16 интерпретируют сообщение о начале сеанса как запрос о регистрации опознанного PDU 40, чтобы от сети 12 узнать о службах определения местонахождения или связи.
Желательно, чтобы операция 132 выключала передатчик 44 PDU 40 сразу же после передачи сообщения. Специалистам в этой области техники известно, что включение передатчика 44 вынуждает PDU 40 потреблять много энергии. Но этот передатчик нужно включать лишь на очень короткое время для передачи сообщения о начале сеанса и тогда потребление мощности будет меньше.
Для настоящего изобретения не имеют большого значения те операции, которые применяются сетью 12 для определения того, произошла ли и как выполняется регистрация PDU 40. На сообщение о начале сеанса сеть 12 отвечает подтверждением приема этого сообщения, которое извещает о регистрации сетью 12 PDU 40, готового к приему команд управления.
После операции 132 PDU 40 выполняет операцию запроса 134 для определения действительного поступления подтверждения приема сообщения о начале сеанса. Операция 134 может быть выполнена настройкой приемника 46 (см. фиг. 3) на определенный канал, который будет передавать сообщения, принимаемые абонентскими аппаратами 30 (см. фиг. 1). Сообщение с подтверждением приема будет адресоваться определенным устройствам PDU 40, для чего используются идентификационные номера этих устройств.
Если при операции 134 будет установлено, что подтверждения приема сообщения о начале сеанса не получено, то программное управление переходит к операции 128 для изменения параметров активизации, а затем включает неактивный режим работы. Сеть 12 в регистрации может отказать по одной из нескольких причин. Например, рабочая нагрузка при обмене высокоприоритетной информацией может вызвать временную перегрузку сети 12. Возможно также, что запрашивающий регистрацию абонент какого-либо PDU 40 не оплатил счета за предыдущие услуги.
В указанных и иных ситуациях операция 128 может включить неактивный режим возвратом к процедуре 110, чтобы сэкономить мощность и ожидать ввода последующих данных, после чего снова пытаются получить доступ к сети 12. Переход в неактивное состояние повышает срок службы батарей и работоспособность PDU 40.
Когда операция 134 установит, что действительно получено подтверждение приема сообщения о начале сеанса, операция 136 производит установку параметров определения местонахождения в соответствии с данными подтверждения приема. В результате такой установки PDU 40 программируется для работы с определенными параметрами, что дает наилучшие результаты при эксплуатации сети 12. Например, в варианте определения местонахождения удаленного объекта настоящего изобретения, о котором говорилось выше, эти параметры могут определять конкретную частоту канала и временной интервал для передачи определяющих положение объекта импульсов, которые будут приниматься спутником 14 (о чем говорилось выше в связи с операциями 106 - 108, см. фиг. 6).
Эти параметры могут также характеризовать определенное значение интервала между определяющими положение объекта импульсами. В предпочтительном варианте изобретения этот интервал примерно равен пяти секундам, но это значение может быть больше или меньше в зависимости от условий работы. Операция 136 производит установку параметров определения местонахождения записью соответствующих данных в запоминающее устройство 58 PDU 40 и, в частности, в таблицу параметров 138 (см. фиг. 10) определения местонахождения объекта.
После операции 136 PDU 40 определяет, что действия по определению местонахождения и с другими параметрами закончены почти успешно и программное управление переключается на процедуру режима ожидания 114.
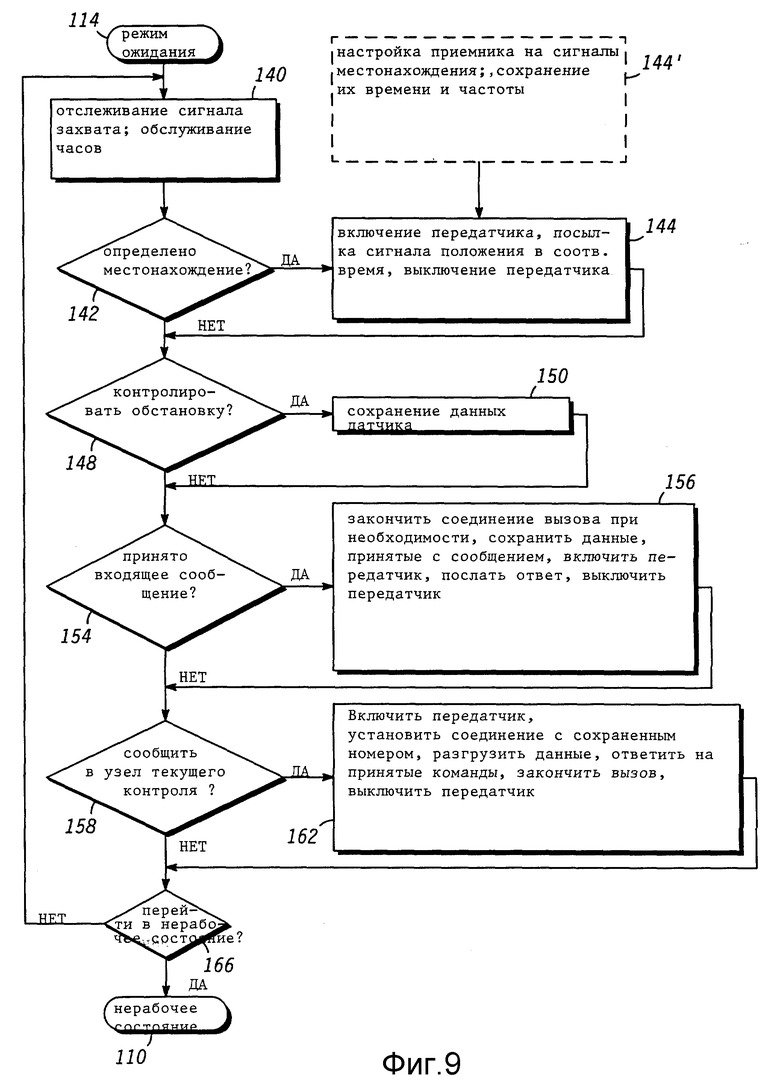
На фиг. 9 приведена блок-схема процедуры режима ожидания 114. При вводе этой процедуры PDU 40 может с помощью операции 140 выполнять некоторые действия фоновой программы, например продолжать слежение за сигналом захвата и сопровождения объекта, который ранее был захвачен при операции 126 (см. фиг. 8), и обслуживание своих часов.
После операции 140 операция запроса 142 определяет нужно ли PDU 40 начинать действия по определению местонахождения объекта установлением связи с сетью 12. Это программируемый параметр, который обычно используется для указания того, что необходимы действия по определению месторождения.
Для начала действия по определению местонахождения объекта PDU 40 выполняет операцию 144, с помощью которой в сеть 12 - непосредственно или косвенно установленной с ней связью - сообщается о месте нахождения PDU 40. В данном случае с помощью указанной связи одна сторона передает информацию, которую - по ее содержанию - другая сторона использует для определения местонахождения объекта.
В частности, в варианте настоящего изобретения определения местонахождения удаленного объекта при операции 144 происходит передача импульсов положения в определенные моменты времени. Эти моменты времени могут задаваться согласно операции 136 (см. фиг. 8). При этом передатчик 44 обычно включается как можно позже (после установки временных параметров импульса положения) и выключается как можно быстрее после передачи этого импульса - для экономии электрической мощности. Процедура режима ожидания 114 выполняется в цикле и поэтому для передачи любого числа импульсов операция 144 выполняется многократно.
В соответствии с рассмотренным выше вариантом настоящего изобретения определения локального положения объекта могут выполняться приведенные на фиг. 9 альтернативные операции 144' (они очерчены пунктирной линией), а не рассмотренная выше операция 144. В случае определения локального положения объекта PDU 40 определяет (или по меньшей мере производит подборку данных для такого определения) положение объекта. При операции 144' PDU 40 настраивает свой приемник 46 (см. фиг. 3) на тот канал, по которому находящийся на орбите спутник 14 передает импульс положения; затем PDU производит измерения и вводит в память значения времени и частоты, соответствующие импульсам положения.
Значения времени и частоты можно ввести и в таблицу записи данных 146 (см. фиг. 10), которая хранится в запоминающем устройстве 58 (см. фиг. 3). Иначе говоря, операция 144' выполняет почти те же операции, о которых говорилось выше применительно к операции 106 (см. фиг. 6).
По окончании операции 144 или 144' или после того, как операция 142 установит, что действий по определению местонахождения не требуется, процедура 114 выполняет операцию запроса 148 и определяет необходимость текущего контроля за состоянием обстановки. Такое определение можно сделать на основании анализа программируемых параметров, хранимых в запоминающем устройстве 58 (см. фиг. 3). Если запрошен текущий контроль за состоянием обстановки, то операция 150 при необходимости включает соответствующие датчики, получает от различных датчиков отсека 54 данные и вводит эту информацию в запоминающее устройство. Информацию датчика можно ввести и в таблицу записи данных 146 (см. фиг. 10).
После операции 150 или после того, как операция 148 установит, что текущего контроля за состоянием обстановки не требуется, процедура 114 выполняет операцию запроса 154. С ее помощью определяется принял или нет приемник 46 (см. фиг. 3) сообщение от сети 12, адресованное PDU 40. Это сообщение может информировать о поступлении вызова или о том, что сеть 12 пытается связаться с PDU 40, анализируя данные его определения месторождения объекта.
Когда операция 154 отметит прием входящего сигнала, включается операция 156. Если входное сообщение извещает о поступившем вызове, то операция 156 начинает те действия, которые необходимы для реализации этого вызова. Эти действия для данного изобретения большого значения не имеют, но могут содержать такие операции, которые равнозначны "ответу" на вызов или "возврату трубки на рычаг", т.е. операциям обычной телефонной связи.
Если такое сообщение сопровождается какими-либо данными, то операция 156 может ввести их в запоминающее устройство 58. К таким сопровождающим данным могут, например, относиться географическая широта и долгота. Эту информацию географического положения можно обработать в центре обработки данных в соответствии с вариантом настоящего изобретения. Данные положения объекта можно ввести в таблицу записи данных 146 (см. фиг. 10).
Принятые вместе с вызовом данные можно рассматривать как команду или инструкцию для PDU 40, которое должно начать определенные действия, а операция 156 - их исполнять. Например, эти команды или инструкции включают операцию 156, которая вводит запрограммированные данные (принятые по сети 12 вместе с командной, поступившей от вызывающей стороны) в запоминающее устройство 58.
Как отмечалось выше, эти запрограммированные данные содержат информацию, характеризующую предварительно заданные условия, которые могут быть до того, как PDU 40 переключится из неактивного режима в рабочий. Эта команда заставляет PDU 40 включить его передатчик 44 (см. фиг. 3) и передать соответствующий ответ вызывающей стороне по сети 12. В ответе могут находиться данные, введенные в таблицу записи данных 146 (см. фиг. 10). Таким образом, поступивший вызов можно использовать для получения данных нахождения и/или ненахождения объекта, а также информацию о состоянии обстановки.
В ответ можно ввести и другие рабочие параметры. Например, вызывающей стороне можно сообщить значение текущей частоты, временной интервал и/или другие рабочие параметры, которые используются PDU 40 для связи по сети 12. Таким образом, отдельный направленный самонаводящийся приемник может быть настроен на прием определенных рабочих параметров, точно характеризующих положение PDU 40, что позволяет определить его физическое местонахождение.
Ответ может содержать и информацию о состоянии батарей PDU 40 или о его текущем программировании. Желательно, чтобы операция 156 выключала передатчик 44 как можно быстрее после передачи, чтобы уменьшить потребление электрической мощности.
После операции 156 или после того, как операция 154 установит, что входное сообщение не поступило, операция 158 определяет нужно ли включать режим работы с вызовом. При работе в режиме обслуживания вызова PDU 40 по сети 12 передает сообщение с указанием своего географического положения и реагирует на все команды, которые могут поступить. Эти действия, сообщающие о включении режима работы с вызовом, можно запрограммировать с помощью тех параметров, которые введены в таблицу операций обслуживания вызова 160 (см. фиг. 10) или хранятся в запоминающем устройстве 58 (см. фиг. 3).
Параметры указанных действий аналогичны тем, о которых говорилось выше в связи с табл. 122. Кроме того, эти параметры обслуживания вызова можно использовать в операции вызова для прекращения других действий, связанных, например, с определением местонахождения. Иначе говоря, табл. 160 можно составить так, что операция 158 сообщит о действиях по обслуживанию вызова после того, как с необходимой точностью будет определено местонахождение PDU. Его положение определяется после получения некоторого объема данных с временными и частотными значениями или после того, как закончится какое-то другое нужное действие.
Специалистам в этой области техники известно, что определение местонахождения и передача такой информации одновременно происходить не могут. Так, например, PDU 40 можно запрограммировать на циклическую работу в многочисленных неактивных и рабочих режимах для сбора большого объема данных географического положения объекта и/или текущего контроля обстановки при каждой операции вызова. При необходимости цикл операций вызова можно запрограммировать так, что он будет исполняться в то время, когда ожидается минимальная скорость обслуживания связи.
Когда операция 158 установит наличие вызова, его обслуживание производится операцией 162. Последняя включает передатчик 44 и подготавливает вызов для его передаче по сети 12. Как отмечалось выше, в предпочтительном варианте настоящего изобретения вызов может быть послан любому абоненту по сети 12 и по подключенным к сети линиям PSTN 22. Но в основном PDU 40 направляет вызов в MO 28, которая возможно его ожидает. Номер телефона MO 28 - это программируемый параметр 164 (см. фиг. 10), который хранится в запоминающемся устройстве 58 (см. фиг. 3).
После подготовки вызова PDU 40 сообщает о своем географическом положении в соответствии с данными таблицы записи 146 (см. фиг. 10). PDU 40 реагирует и на любые команды MO 28, включая вывод данных обстановки и ввод в запоминающее устройство новых запрограммированных параметров. Операция 162 выполняется аналогично описанной выше операции 156. По окончании связи с MO 28 операция 162 прекращает обслуживание вызова и включает передатчик 44.
После операции 162 или после того, как операция 158 установит, что действий по обслуживанию вызова не происходило, операция запроса 166 определяет должен ли PDU 40 переходить в режим ожидания. Иначе говоря, операция 166 определяет нужно ли переключаться в режим ожидания или снова перейти в неактивный режим работы. Такое определение выполняется операцией 166 анализом содержимого табл. 158 (см. фиг. 10), которое хранится в запоминающем устройстве 58 (см. фиг. 3).
Как отмечалось выше в связи с таблицами 122 и 160 (см. фиг. 10), в табл. 168 приведены данные, характеризующие действия. Последние могут быть указаны со значениями времени, данными датчиков или с другими законченными действиями, которые выполняются операциями 144 или 162.
Если операция 166 установит, что PDU 40 должно оставаться в режиме ожидания, то программное управление возвращается к операции 140, о которой говорилось выше. Если же операция 166 установит, что PDU 40 должно переключиться в неактивный режим, то программное управление возвращается к неактивной процедуре 110, рассмотренной выше на фиг. 7.
Режим ожидания позволяет PDU 40 переключиться в активный режим работы, при котором определяется его географическое положение, контролируется окружающая его обстановка и обеспечивается связь с сетью 12 и с MO 28. Возможность программирования работы PDU 40 обеспечивает большую гибкость при выборе частоты и других условий работы, которые позволяют PDU 40 определять его местоположение и получать данные об окружающей обстановке.
Возможность установления связи с MO 28 позволяет устройству программировать измерения, когда PDU 40 находится в поле зрения. В частности, под воздействием MO 28 весь способ определения местонахождения и текущего контроля обстановки при необходимости можно изменить под влиянием ранее полученного сообщения или в ответ на другие обстоятельства, которые на PDU 40 никак не влияют. Кроме того, возможность программирования работы PDU 40 позволяет стоимость операций, которые применяются при определении местоположения и при подготовке сообщения о местоположении, увязать с теми операциями, которые минимально необходимы для обеспечения нужд MO 28. Таким образом, настоящее изобретение позволяет значительно снизить расходы на реализацию способа определения местонахождения удаленного объекта.
На фиг. 11 приведена блок-схема процедуры 170 определения местонахождения объекта. Применительно к варианту настоящего изобретения определения местонахождения удаленного объекта процедура 170 может быть реализована CSO 16 (см. фиг. 1), хотя точное местонахождение важным параметром не является. Для варианта определения локального положения эту процедуру можно реализовать при помощи PDU 40 или MO 28.
Процедура 170 работает с метками времени и частоты поступления сигнала, которые введены в ответ на прием импульсов положения. Об этих метках говорилось выше в связи с операциями 106-108 (см. фиг. 6) и операцией 144 (см. фиг. 9). Метки введены в запись данных в виде одной записи, которая определяет один импульс положения относительно одного PDU 40.
При необходимости процедура 170 выполняет операцию 172 приема и ввода в память записей положения. Исполнение операции 172 происходит тогда, когда CSO 16 или MO 28 работает как центр обработки данных. После ввода в память записей положения операция запроса 174 определяет не превышает ли в данном PDU 40 число записей положения определенного порогового значения. Чтобы начать определение географического положения PDU 40 требуется по меньшей мере одна такая запись. А для определения его географического положения с максимальной точностью нужно несколько дополнительных записей.
В отдельных случаях может понадобиться расчет географического положения с разной точностью. По записям положения недостаточно программное управление возвращается снова к операции 172 получения дополнительных записей положения.
Когда операция 174 установит, что для начала расчетов географического положения данного PDU 40 достаточно соответствующих записей, операция 176 определяет площадь сота, покрываемую спутником 14, который составил запись местонахождения. Иначе говоря, на поверхности земли определяется площадь, которая покрыта ячейками 34 (см. фиг. 2) в течение времени, определяемого метками времени поступления сигнала.
Эту площадь можно определить при помощи таблицы (не приведена), которая характеризует геометрические параметры орбиты спутника в зависимости от времени. Орбиты 20 (см. фиг. 1) относительно стабильны и поэтому, зная параметры такой орбиты 20 и характеристики размещенных на спутнике 14 антенн 82 (см. фиг. 5), можно, используя данные времени в записях местоположений, достаточно точно определить покрываемую площадь сота.
На фиг. 12 приведено графическое представление расчетов при определении географического положения. Здесь граница ячейки 34 (см. фиг. 2) представлена кривой 178, которая вычерчивается на карте с координатами в виде значений широты и долготы. На фиг. 12 для ясности приведена только одна кривая 178, но специалистам в этой области техники известно, что на карту можно нанести несколько кривых 178, соответствующих нескольким записям географических положений.
Обратимся к фиг. 11 и 12. После операции 176 операция 180 производит построение окружности 182 (которая охватывает определенные значения времени поступления сигналов TOA) и кривой 184 (которая определяет точки приема сигнала определенной частоты FOA), соответствующих каждой записи географического положения объекта. Для ясности на фиг. 12 приведены только одна окружность TOA 182 и одна кривая FOA 184.
На фиг. 12 видно, что окружности TOA 182 имеют сферические формы, наложение которых на поверхность земли образует круг, который определяет возможное PDU 40. Радиус этой окружности определяется на основании времени задержки распространения сигналов, проходящих между PDU 40 и спутником 14. Возможные местонахождения устройств располагаются по периметрам окружностей TOA 182.
Хотя на фиг. 12 для ясности приведена только одна окружность TOA 182, специалистам в этой области техники известно, что на основании ряда соответствующих записей географического положения можно нанести несколько таких окружностей, перекрывающих друг друга с интервалом около градуса. При этом диаметры окружностей, определяемые передаваемыми импульсами положения, тем меньше, чем ближе друг к другу спутник 14 и PDU 40.
Кривые FOA 184 - это гиперболы, которые характеризуют возможные местонахождения объектов, определяемые входящими в каждую запись местонахождения импульсами положения с доплеровским сдвигом. На фиг. 12 для ясности показана только одна кривая FOA 184, но специалистам в этой области техники известно, что можно построить несколько в общем похожих кривых, которые подобны приведенной на фиг. 12, но относительно нее несколько сдвинутых.
После того, как с помощью операции 180 будет обработано несколько записей географического положения объекта, получают эллипс разбросов (не показан). Этот эллипс получают усреднением ошибок по методу наименьших квадратов, которые связаны с окружностью ТОА 182 и с кривой FOA 184. Погрешности измерений обусловлены многими причинами, например тепловым шумом, дрейфом частоты генератора и др. А площадь внутри эллипса разброса данных характеризует наибольшую вероятность местонахождения PDU 40.
После операции 180 операция 190 определяет точку пересечения кривых. На фиг. 12 видна явная двусмысленность, так как окружность TOA 182 и кривая FOA 184 пересекаются в двух точках. Эту неопределенность устраняют выявлением подлинности ячейки 34, импульсы положения которой были записаны и соответствовали кривой 178.
Если используются несколько записей географического положения, то приблизительный центр области пересечений между эллипсами разбросов определяет географическое положение PDU 40. Точное географическое положение находят объединением эллипсов разбросов и "априорных" данных окружности вероятной ошибки.
Специалистам в этой области техники известно, что чем больше используется записей положения в вычислительных операциях 180 и 190, тем меньше будет эта область и точнее будет определено географическое положение объекта. Как отмечалось выше, PDU 40 можно запрограммировать так, чтобы генерировать и подготавливать столько импульсов положения, сколько нужно для обеспечения необходимой точности.
На фиг. 11 видно, что в варианте настоящего изобретения определения местонахождения удаленного объекта операции 192 и 194 выполняются CSO 16. Операция 192 посылает сообщение PDU 40 с информацией о его положении, а операция 194 записывает входное сообщение для последующей обработки счетов. В соответствующее время по сети 12 записи счетов можно направить в определенный центр их обработки (не показан).
Как отмечалось выше (см. фиг. 9), PDU 40 данные своего географического положения может ввести в таблицу, а затем передать эти данные MO 28 в удобное время. Вполне возможно, чтобы CSO 16 посылала данные географического положения непосредственно MO 28.
Итак, в настоящем изобретении предлагаются улучшенная система, способ и/или аппаратура для определения местонахождения удаленного объекта. Определение местонахождения в соответствии с предпочтительными вариантами настоящего изобретения производится в общемировом масштабе, достаточно надежно, гибко и без больших затрат.
Общемировой масштаб определения местонахождения обеспечивается всемирной инфраструктурой системы связи в виде сети 12. Надежность обеспечена за счет повсеместного охвата земли сетью 12, контролем за потреблением мощности PDU 40, а также применением одной сети связи для определения положения и для передачи сообщений с данными местонахождения объекта.
PDU 40 включается в рабочий режим только тогда, когда высока вероятность надежного получения и/или сообщения информации о местонахождении объекта. Контроль за потреблением мощности PDU 40 повышает срок службы его батарей.
Гибкость работы достигается возможностью программирования PDU 40. Его программирование позволяет значительно снизить расходы, так как используются лишь те средства связи, которые обеспечивают необходимую точность слежения за перемещением объекта. Кроме того, снижение стоимости настоящего изобретения достигнуто применением такой инфраструктуры системы связи, в которой применяются различные операции, например речевая связь, а не только операции по определению местонахождения. Таким образом, расходы на инфраструктуру спутниковой системы связи можно покрыть за счет различных применений и пропорционально использованию этой системы для таких целей.
Настоящее изобретение описано со ссылкой на предпочтительные варианты. Но специалисты в этой области техники могут сделать изменения и модификации, не отклоняясь от объема настоящего изобретения.
Например, можно предложить другие процедуры для выполнения почти таких же операций, которые здесь описаны. Можно также использовать запоминающее устройство, которое отличается от предложенного в настоящем изобретении. Далее, поскольку предложенные варианты настоящего изобретения основаны на определенной геометрической форме орбиты и покрываемой спутником площади, то специалистам в этой области техники известно, что настоящее изобретение можно применить к разным геометрическим формам и алгоритмам, позволяющим решать почти такие же задачи.
Предполагается, что эти и другие модификации, которые очевидны специалистам в этой области техники, должны быть включены в объем настоящего изобретения.


Изобретение относится к системам определения местонахождения, использующим системы радиосвязи. Достигаемый технический результат - возможность гибкого получения информации о местоположении удаленного объекта в мировом масштабе. Согласно изобретению спутники, входящие в состав системы, непрерывно передают сигналы захвата и сопровождения объекта. Устройства определения положения дистанционно программируются на включение в активный режим под воздействием соответствующего события и при приеме сигнала захвата и сопровождения в него переключаются. Для определения положения объекта можно по специальному графику передавать импульсы положения. Так как следствием движения спутника являются разный доплеровский сдвиг частоты, а также разные задержки распространения импульсов положения, то анализ этих величин позволяет определить местоположение устройств определения местоположения. 3 с. и 18 з. п. ф-лы, 12 ил.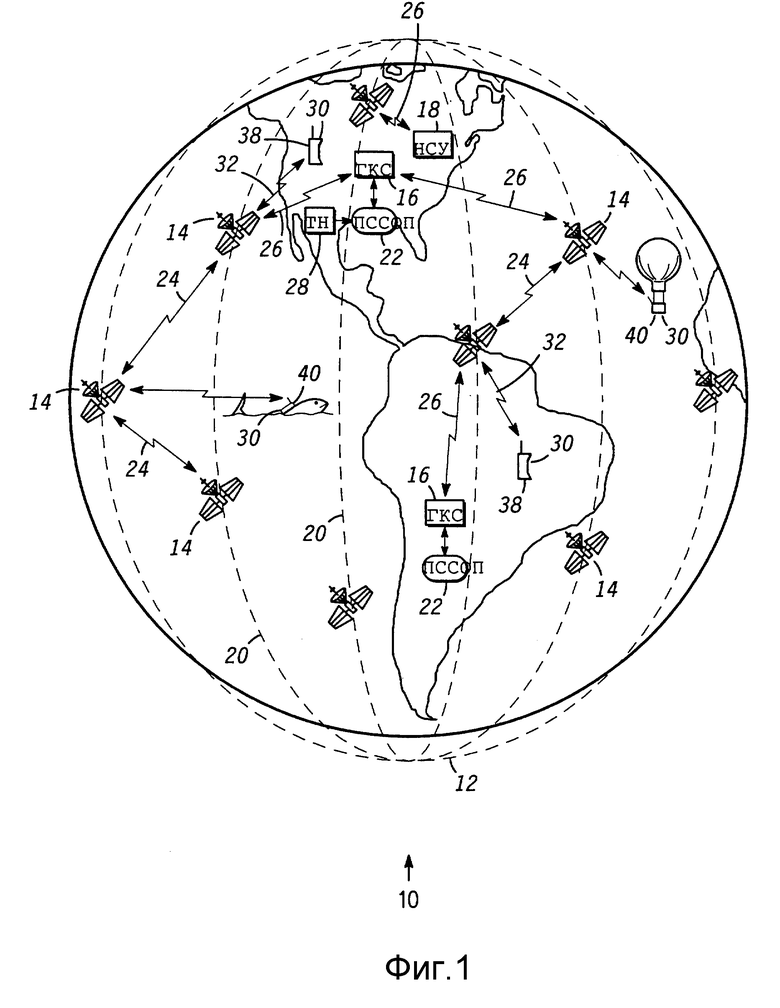
| Мищенко И.Н | |||
| и др | |||
| - Зарубежная радиоэлектроника, 1989, N 1, с.69, 71, 75, 76, 78, 79 | |||
| US 4315262 A, 09.02.82 | |||
| US 4359733 A, 16.11.82 | |||
| СПОСОБ РАДИОСВЯЗИ И ПЕРЕДАЧИ ТЕЛЕВИДЕНИЯ С ИСПОЛЬЗОВАНИЕМ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 0 |
|
SU302840A1 |
| Устройство приема пакетной информации системы спутниковой связи | 1986 |
|
SU1506561A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Защитное и направляющее устройство для тягового органа и питающих линий отрывной добычной машины | 1983 |
|
SU1230472A3 |
