Изобретение относится к области локации, преимущественно к пассивной оптической локации удаленных объектов на фоне звезд.
Известен способ селекции объекта на фоне звезд [1], заключающийся в регистрации изображения объекта и звезд в фокальной плоскости приемного телескопа, считывании зарегистрированного изображения первой сканирующей апертурой, визуальном наблюдении зарегистрированного изображения путем преобразования полученного видеосигнала в первый световой поток, обработке полученного видеосигнала путем его преобразования во второй световой поток, регистрации второго светового потока и его накоплении на фотопластинке, получая накопленное изображение, и последующем выделении объекта путем обработки накопленного изображения.
Недостатком известного способа являются низкая точность и низкое быстродействие, обусловленное необходимостью фотохимической обработки фотопластинки для получения накопленного изображения. Кроме того, в известном способе при работе по априорно неизвестному объекту селекция изображения объекта может быть выполнена только визуальным способом.
Известен также способ селекции объекта на фоне звезд, выбранный за прототип [2], заключающийся в считывании перемещения сигнала изображения объекта αo и звезд αзв, зарегистрированного в фокальной плоскости телескопа первой сканирующей апертурой, амплитудной селекции полученного видеосигнала  с опорным уровнем
с опорным уровнем  , бинарном квантовании и дискретизации отселектированного видеосигнала, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта.
, бинарном квантовании и дискретизации отселектированного видеосигнала, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта.
Недостатком известного способа является низкая помехозащищенность, связанная с тем, что при получении изображения шум звездного неба суммируется с изображением объекта.
Целью изображения является повышение помехозащищенности способа.
Поставленная цель достигается тем, что в способе селекции объекта на фоне звезд, основанном на считывании перемещения сигнала изображения объекта αo и звезд αзв, зарегистрированного в фокальной плоскости телескопа первой сканирующей апертурой, амплитудной селекции полученного видеосигнала  с опорным уровнем
с опорным уровнем  , бинарном квантовании и дискретизации отселектированного видеосигнала, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта, осуществляют дополнительную амплитудную селекцию видеосигнала с верхним опорным уровнем
, бинарном квантовании и дискретизации отселектированного видеосигнала, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта, осуществляют дополнительную амплитудную селекцию видеосигнала с верхним опорным уровнем  , преобразуют суммарный видеосигнал в световой поток Фн суммарного изображения, осуществляют пространственно частотную фильтрацию светового потока в направлении α = αзв± 90°, считывают отфильтрованный световой поток второй сканирующей апертурой, получают видеосигнал
, преобразуют суммарный видеосигнал в световой поток Фн суммарного изображения, осуществляют пространственно частотную фильтрацию светового потока в направлении α = αзв± 90°, считывают отфильтрованный световой поток второй сканирующей апертурой, получают видеосигнал  , производят двухуровневое квантование с порогом Vб и дискретизацию полученного видеосигнала, определяют координаты отсчетов ненулевого дискретизирования видеосигнала
, производят двухуровневое квантование с порогом Vб и дискретизацию полученного видеосигнала, определяют координаты отсчетов ненулевого дискретизирования видеосигнала  по строке и кадру, находят минимальные τ
по строке и кадру, находят минимальные τ , определенного из верхней границы блеска объекта, определяют угол α как α = arctg[(τ
, определенного из верхней границы блеска объекта, определяют угол α как α = arctg[(τ
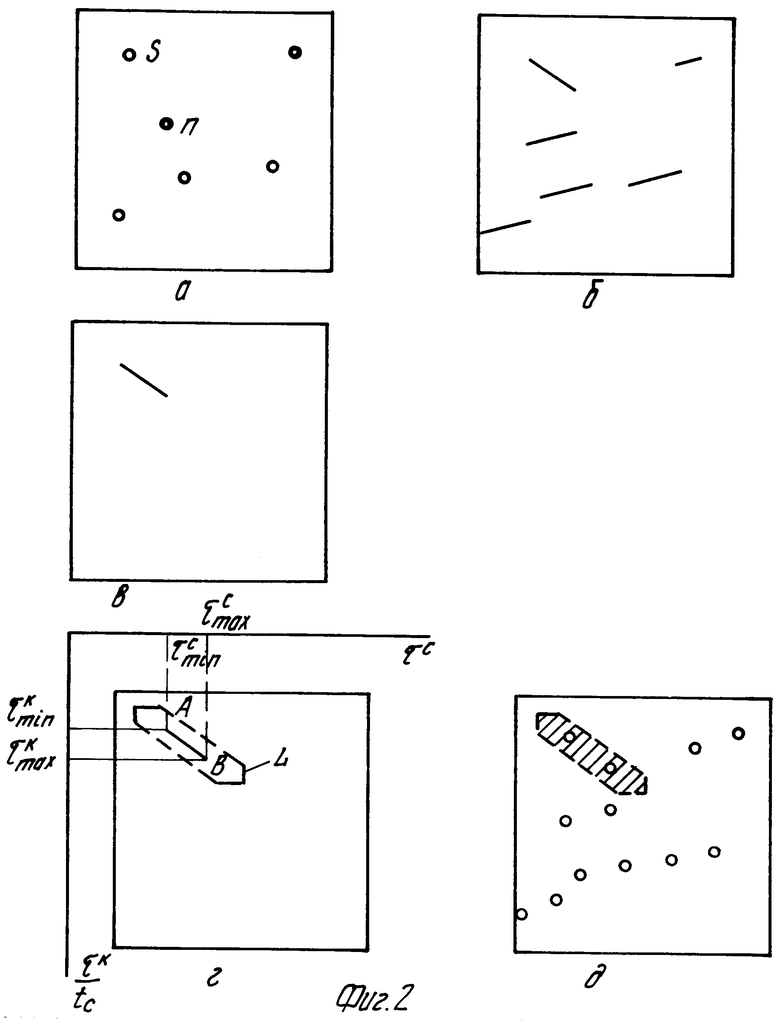
На фиг. 1 изображена блок-схема устройства, реализующего предлагаемый способ, на фиг. 2 (а, б, в, г, д) - изображения звезд в фокальной плоскости телескопа, на фиг. 3 - диаграммы преобразования сигнала, на фиг. 4 - зависимость дифракционной эффективности от направления для блока фильтрации.
На фиг. 1 введены следующие обозначения: 1 - приемный телескоп, 2 - блок регистрации и изображений, 3 - блок стробирования, 4 - блок пороговой обработки, 5 - блок суммирования, 6 - блок преобразования, 7 - блок фильтрации, 8 - блок обратного преобразования, 9 - блок анализа, 10 - блок выделения.
Предлагаемый способ с помощью приведенного устройства реализуется следующим образом. Излучение от объекта и звезд принимают приемным телескопом 1 с фокусным расстоянием f, формирующим в фокальной плоскости изображение объекта и звезд i (x,y)
i(x,y) = s(x,y) + n(x,y),
где s(x,y) - изображение объекта,
n(x,y) - изображение звездного фона.
Вид изображения  представлен на фиг. 2,а.
представлен на фиг. 2,а.
Сформированное изображение регистрируют в блоке регистрации изображений 2, реализованном, например, на базе передающей телевизионной камеры. Считывая зарегистрированное в фокальной плоскости приемного телескопа изображение i (x, y) первой сканирующей апертурой (в данном случае электронным лучом), преобразуют зарегистрированное изображение в видеосигнал  ,
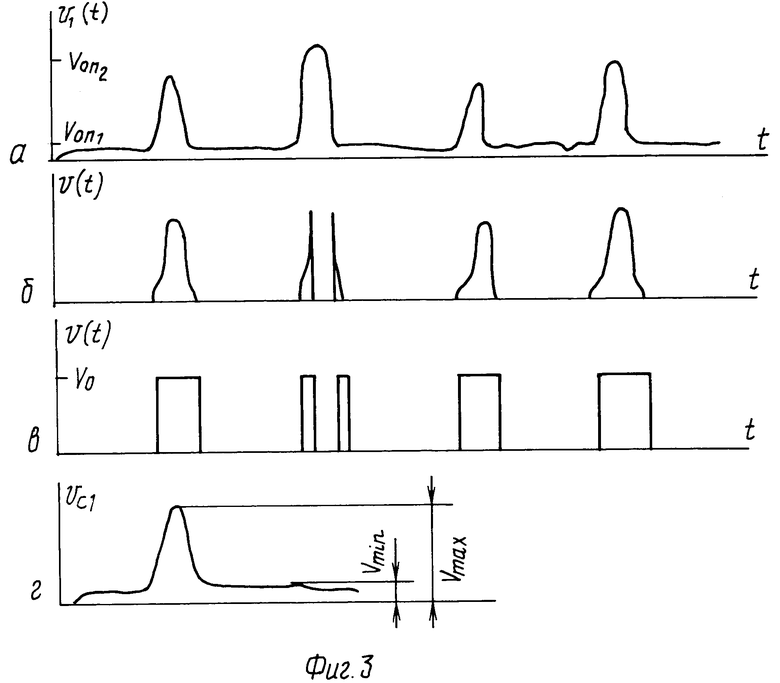
,  = V1(t), примерный вид видеосигнала V1(t) приведен на фиг. 3, а. В силу известного закона сканирования сканирующей апертурой существует однозначная зависимость между i (x,y) и V(t) и, следовательно, временной аргумент t однозначно соответствует пространственным координатам x, y. Поэтому в дальнейшем изложении считаем обозначения i (x,y) и V (t) тождественными с точки зрения характеристики пространственного расположения изображения объекта и звезд в зарегистрированном изображении.
= V1(t), примерный вид видеосигнала V1(t) приведен на фиг. 3, а. В силу известного закона сканирования сканирующей апертурой существует однозначная зависимость между i (x,y) и V(t) и, следовательно, временной аргумент t однозначно соответствует пространственным координатам x, y. Поэтому в дальнейшем изложении считаем обозначения i (x,y) и V (t) тождественными с точки зрения характеристики пространственного расположения изображения объекта и звезд в зарегистрированном изображении.
В блоке стробирования 3, выполненном, например, на базе компараторов и логических элементов, осуществляют амплитудную селекцию видеосигнала V1(t) в интервале напряжений между двумя опорными уровнями сигнала  , то есть преобразуют видеосигнал V1 (t) по закону:
, то есть преобразуют видеосигнал V1 (t) по закону:
При этом сравнение V1 (t) с Vоп позволяет устранить влияние шума, вызванного как собственными шумами блока 2, так и фоном звездного неба, а сравнение с  позволяет ограничить влияние интенсивности помех, связанных с яркими звездами (блеск которых значительно превышает максимально возможную величину блеска селектируемого объекта). Вид видеосигнала V2(t) представлен на фиг. 3,б.
позволяет ограничить влияние интенсивности помех, связанных с яркими звездами (блеск которых значительно превышает максимально возможную величину блеска селектируемого объекта). Вид видеосигнала V2(t) представлен на фиг. 3,б.
В блоке пороговой обработки 4, реализованном на пороговом устройстве и логических элементах, осуществляют бинарное квантование видеосигнала V2(t), получая видеосигнал V3(t):
где Vпор - уровень порогового напряжения (в частном случае равный нулю). Примерный вид V3(t) приведен на фиг. 3,в.
В блоке суммирования 5, реализуемом на базе логических элементов, сумматора, оперативного запоминающего устройства (ОЗУ) на кадр осуществляют дискретизацию сигнала V3(t), в результате получая суммарный видеосигнал
Изображение iΣ(x,y), соответствующее VΣ(t) , приведено на фиг. 2, б (изображение iΣ(x,y) приведено для простоты, для случая неподвижного приемного телескопа 10.
Вследствие вращения Земли изображения n (x, y) звезд, регистрируемые неподвижным телескопом, будут представлять собой (при регистрации в ряд последовательных моментов времени) дуги концентрических окружностей одинаковой угловой величины. В силу малого поля зрения приемного телескопа и достаточно малых времен экспозиции (малые n) дуги концентрических окружностей с высокой степенью точности могут быть заменены параллельными отрезками равной длины. Изображение объекта S (x,y) будет (при малых экспозициях) в силу перемещения объекта по траектории движения и в силу приведенных соображений также иметь вид отрезка прямой, однако имеющего произвольную ориентацию, связанную с видом траектории объекта.
Суммарный видеосигнал UΣ(t) преобразуют в блоке преобразования 6, реализованном, например, на основе высокояркостной трубки в световой поток Фн суммарного изображения. Пространственное распределение светового потока Фн пропорционально суммарному изображению iΣ(x,y) . В блоке фильтрации 7 осуществляют оптическую пространственно-частотную фильтрацию светового потока Фн в направлении
где αзв - известное направление перемещения изображений звезд.
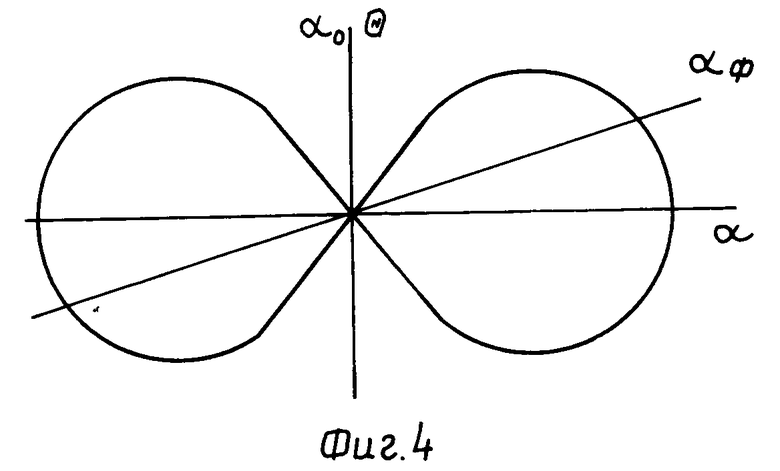
Блок фильтрации 7 может быть реализован, например, на основе пространственно-временного модулятора света (ПВМС) типа ПРИЗ, обладающего анизотропией оптических свойств. Зависимость дифракционной эффективности η от направления (угла θ) для этого прибора приведена на фиг. 4.
Для угла θ = 0 η(θ) = η(0) = 0 и, следовательно, изображения, направления которых совпадают с величиной угла θ = 0, будут на выходе прибора отфильтрованы.
Для осуществления пространственно-частотной фильтрации изображений звезд достаточно установить ПВМС таким образом, чтобы выполнялось условие αзв= θ = 0 (например, путем поворота ПВМС).
Направление перемещения объекта не совпадает с направлением перемещения звезд, то есть αоб≠ αзв и, следовательно,
η(θ) = η(αоб) ≠ 0
Поэтому изображение объекта будет передаваться системой фильтрации с ненулевым значением дифракционной эффективности η(θo) и, следовательно, в отфильтрованном суммарном изображении iΣ(x,y)отф будет присутствовать только изображение объекта  . Вид отфильтрованного изображения
. Вид отфильтрованного изображения  приведен на фиг. 2, в.
приведен на фиг. 2, в.
Отфильтрованный световой поток Фн суммарного изображения, в котором благодаря пространственно-частотной фильтрации отсутствуют изображения звезд в блоке обратного преобразования 8, выполненном, например, на основе передающей телевизионной камеры, считывают второй сканирующей апертурой, преобразовывают полученный таким образом видеосигнал  = V4(t) путем двухуровневого бинарного квантования с порогом Vб в видеосигнал V5(t)
= V4(t) путем двухуровневого бинарного квантования с порогом Vб в видеосигнал V5(t)
Видеосигнал V5(t) поступает в блок анализа 9, в котором осуществляют его обработку. Блок анализа 9 реализуют, например, на базе микропроцессора, цифро-аналогового и аналого-цифрового преобразователей и ОЗУ.
Видеосигнал V5(t) дискретизируют, определяют координаты отсчетов ненулевого дискретизированного видеосигнала  , соответствующих изображению объекта, и находят минимальные τ
, соответствующих изображению объекта, и находят минимальные τ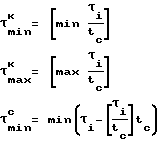
где [ ] - целая часть числа;
tс - время, затрачиваемое второй считывающей апертурой на считывание одной строки;
τi - временная координата видеосигнала  .
.
Формируют по результатам анализа стробирующий видеосигнал Vs. На фиг. 2, г графически изображен результат формирования строба Vs, для наглядности показанный в виде двумерного изображения. Строб Vs формируют таким образом, чтобы в последующих кадрах изображение объекта соответствовало стробируемой области видеосигнала, ограниченной, например, линией L на фиг. 2, г. То есть, анализируя полученные значения координат τ ). Так как траектория перемещения объекта является гладкой, то направление перемещения изображения объекта за период между экспозицией "n"-ого и "n+1"-ого кадров изменится незначительно по сравнению с направлением
). Так как траектория перемещения объекта является гладкой, то направление перемещения изображения объекта за период между экспозицией "n"-ого и "n+1"-ого кадров изменится незначительно по сравнению с направлением  .
.
Следовательно, выбирая фрагмент видеосигнала  , соответствующий направлению
, соответствующий направлению  , определяемому соотношением величин τ
, определяемому соотношением величин τ
Так как по результатам анализа видеосигнала  невозможно определить направление перемещения объекта (от A к B или наоборот), то строб Vs формируют таким образом, чтобы выбранный фрагмент видеосигнала
невозможно определить направление перемещения объекта (от A к B или наоборот), то строб Vs формируют таким образом, чтобы выбранный фрагмент видеосигнала  содержал изображение объекта в любом из этих случаев. (Направление перемещения объекта однозначно определяют на дальнейших этапах обработки (см. ниже) по результатам сравнения τ
содержал изображение объекта в любом из этих случаев. (Направление перемещения объекта однозначно определяют на дальнейших этапах обработки (см. ниже) по результатам сравнения τ совокупностью значений координат {τj} , характеризующих положение изображения объекта в кадре).
совокупностью значений координат {τj} , характеризующих положение изображения объекта в кадре).
Используя сформированный строб Vs, выделяют фрагмент Vf(t) видеосигнала V1(t), причем границы выделяемого фрагмента определяются из анализа определенных координат отсчетов (заштрихованная область на фиг. 2, д (для сравнения на фиг. 2, д крестами показано изображение объекта и звезд i (x,y) [ср. с фиг. 2, а)].
Очевидно, что изображения звезд в выделяемом фрагменте Vf(t) (см. фиг. 2, д) отсутствуют. Выделение фрагмента видеосигнала Vf(t) осуществляют в блоке 3 по сигналам управления из блока 9.
Выделенный фрагмент видеосигнала Vf(t) анализируют в блоке 9 с целью определения минимального Vmin и максимального Vmax уровней видеосигнала Vf(t), в соответствии с которыми формируют новые опорные уровни сигнала  , которые подают на блок 3.
, которые подают на блок 3.
По результатам определения значений координат отсчетов τ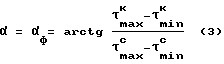
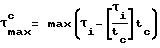
и определяют величину порога Vб по результатам сравнения величин αф и αo .
Величину порога Vб определяют, исходя из следующих соображений. Как было показано выше, для того, чтобы полностью отфильтровать изображения звезд, направление фильтрации выбирают таким образом, чтобы направление ηmin совпадало с направлением перемещения звезд, то есть αзв соответствовало θ = 0 . При этом, если направление перемещения изображения объекта αоб соответствует направлению θo≠ 90°, то дифракционная эффективность отфильтрованного изображения объекта η(θo) не равна maxη(θ) .
Для того чтобы дифракционная эффективность отфильтрованного изображения объекта η(θ) была максимально возможной, необходимо, чтобы направление фильтрации αф , определяемое по (3). соответствовало θ = 90° . В этом случае интенсивность изображения объекта S(x,y) в отфильтрованном изображении будет максимальной.
αф , в общем случае, не связано с αзв выражением  и в соответствии с зависимостью η(θ) (фиг. 4) в случае попадания в выделяемый фрагмент видеосигнала Vf(t) изображения звезды оно будет давать ненулевое изображение nотф(x,y) в
и в соответствии с зависимостью η(θ) (фиг. 4) в случае попадания в выделяемый фрагмент видеосигнала Vf(t) изображения звезды оно будет давать ненулевое изображение nотф(x,y) в  . Поэтому вводят порог Vб, величина которого выбирается исходя из вида зависимости η(θ) и соотношения величин αф и αзв .
. Поэтому вводят порог Vб, величина которого выбирается исходя из вида зависимости η(θ) и соотношения величин αф и αзв .
Очевидно, что так как зависимость η(θ) имеет один максимум (существует только одно направление пространственно-частотного спектра, для которого дифракционная эффективность, а следовательно, и интенсивность отфильтрованного светового потока максимальны), то при соответствии α = αф значению θ = 90° максимум интенсивности светового потока Фн будет соответствовать изображению объекта, а выбор величины порога Vб, соответствующей интенсивности светового потока Фн от изображения с ориентацией αпор , промежуточной между αзв и αф , позволит полностью отфильтровать изображения звезд.
Таким образом, в блоке анализа 9 после анализа подвергнутого пороговой обработке с порогом Vб видеосигнала Vf(t) опеределяют совокупность соответствующих временных задержек  , характеризующих положение объекта в поле зрения приемного телескопа 1 и однозначно определяющих координаты селектируемого объекта. Используя видеосигнал Vф(t) и
, характеризующих положение объекта в поле зрения приемного телескопа 1 и однозначно определяющих координаты селектируемого объекта. Используя видеосигнал Vф(t) и  в блоке выделения объекта 10, реализованном, например, на базе видеоконтрольного устройства (ВКУ), компараторов и логических элементов, формируют на экране ВКУ отселектированное изображение объекта и необходимую информацию о его координатах, направлении перемещения и т.д., легко определяемые по результатам анализа
в блоке выделения объекта 10, реализованном, например, на базе видеоконтрольного устройства (ВКУ), компараторов и логических элементов, формируют на экране ВКУ отселектированное изображение объекта и необходимую информацию о его координатах, направлении перемещения и т.д., легко определяемые по результатам анализа  в блоке 9.
в блоке 9.
Способ по изобретению имеет по сравнению с прототипом следующие преимущества:
повышенную точность, так как в результате амплитудной селекции видеосигнала  в интервале напряжений между двумя опорными уровнями
в интервале напряжений между двумя опорными уровнями  устраняют фон звездного неба и влияние ярких звезд в изображении. Кроме того, выделение объекта происходит автоматически, устраняя влияние ошибок визуальной селекции;
устраняют фон звездного неба и влияние ярких звезд в изображении. Кроме того, выделение объекта происходит автоматически, устраняя влияние ошибок визуальной селекции;
повышенное быстродействие, обусловленное отсутствием фотохимической обработки зарегистрированных изображений и автоматически режимом селекции.
Дополнительными преимуществами являются возможность автоматического режима селекции, обусловленная применением селекторной оптической пространственно-частотной фильтрации и возможность определения координат и траектории движения селектируемого объекта непосредственно после окончания регистрации изображения объекта и звезд.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2081437C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1988 |
|
RU2042155C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249234C1 |
| СПОСОБ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2015 |
|
RU2597144C1 |
| Способ получения и обработки изображений дистанционного зондирования Земли, искажённых турбулентной атмосферой | 2016 |
|
RU2629925C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТА НА УДАЛЕННОМ ФОНЕ | 1984 |
|
RU2081435C1 |
| СПОСОБ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ (ДЗЗ) | 2013 |
|
RU2531024C1 |
| ПАРАЛЛАКТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1984 |
|
RU2027144C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
Изобретение относится к области локации, преимущественно к пассивной оптической локации удаленных объектов на фоне звезд. Целью изобретения является повышение помехозащищенности способа. Поставленная цель достигается тем, что в известном способе, основанном на считывании изображения объекта и звезд, зарегистрированного в фокальной плоскости телескопа 1 первой сканирующей апертурой в блоке регистрации изображений 2, обработке полученного видеосигнала  и последующем выделении объекта, амплитудной селекции видеосигнала в блоке стробирования 3 в интервале напряжении между двумя опорными уровнями
и последующем выделении объекта, амплитудной селекции видеосигнала в блоке стробирования 3 в интервале напряжении между двумя опорными уровнями  и
и  , бинарном квантовании в блоке пороговой обработки 4 и дискретизации отселектированного видеосигнала в блоке суммирования 5, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта, осуществляют дополнительную амплитудную селекцию видеосигнала с верхним опорным уровнем
, бинарном квантовании в блоке пороговой обработки 4 и дискретизации отселектированного видеосигнала в блоке суммирования 5, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта, осуществляют дополнительную амплитудную селекцию видеосигнала с верхним опорным уровнем  , преобразуют суммарный видеосигнал в световой поток суммарного изображения в блоке преобразования 6, осуществляют пространственно-частотную фильтрацию светового потока в направлении α=α3в±90o, в блоке фильтрации 7 считывают отфильтрованный световой поток второй сканируюшей апертурой в блоке обратного преобразователя, получают видеосигнал
, преобразуют суммарный видеосигнал в световой поток суммарного изображения в блоке преобразования 6, осуществляют пространственно-частотную фильтрацию светового потока в направлении α=α3в±90o, в блоке фильтрации 7 считывают отфильтрованный световой поток второй сканируюшей апертурой в блоке обратного преобразователя, получают видеосигнал  , производят двухуровневое квантование с порогом Vби дискретизацию полученного видеосигнала в блоке диализа 9, определяют координаты отсчетов ненулевого дискретированного видеосигнала
, производят двухуровневое квантование с порогом Vби дискретизацию полученного видеосигнала в блоке диализа 9, определяют координаты отсчетов ненулевого дискретированного видеосигнала  по строке и кадру, находят минимальные τ
по строке и кадру, находят минимальные τ во временном интервале, соответствующем стробу Vs, регистрируют минимальный Vmin и максимальный Vmax уровни видеосигнала выделенного фрагмента, формируют в соответствии с Vmin и Vmax, опорные уровни сигнала
во временном интервале, соответствующем стробу Vs, регистрируют минимальный Vmin и максимальный Vmax уровни видеосигнала выделенного фрагмента, формируют в соответствии с Vmin и Vmax, опорные уровни сигнала  и определяют угол α как
и определяют угол α как  , выделяют объект по превышению величины порога Vб по результатам анализа величин αф и α3в, причем направление α3в cовпадает с направлением изображений звезд в фокальной плоcкости телескопа. 4 ил.
, выделяют объект по превышению величины порога Vб по результатам анализа величин αф и α3в, причем направление α3в cовпадает с направлением изображений звезд в фокальной плоcкости телескопа. 4 ил.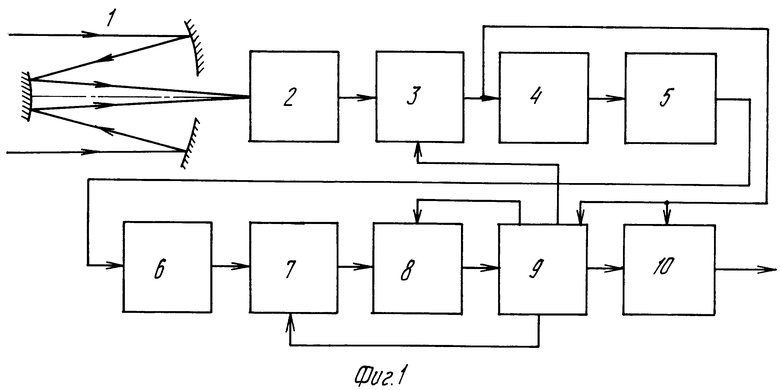
Способ селекции объекта на фоне звезд, основанный на считывании перемещения сигнала изображения объекта αo и звезд αзв, зарегистрированного в фокальной плоскости телескопа первой сканирующей апертурой, амплитудной селекции полученного видеосигнала  с опорным уровнем
с опорным уровнем  бинарном квантовании и дискретизации отселектированного видеосигнала, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта, отличающийся тем, что, с целью повышения помехозащищенности, осуществляют дополнительную амплитудную селекцию видеосигнала с верхним опорным уровнем
бинарном квантовании и дискретизации отселектированного видеосигнала, логическом суммировании N кадров отселектированного видеосигнала и выделении объекта, отличающийся тем, что, с целью повышения помехозащищенности, осуществляют дополнительную амплитудную селекцию видеосигнала с верхним опорным уровнем  преобразуют суммарный видеосигнал в световой поток Фн суммарного изображения, осуществляют пространственно-частотную фильтрацию светового потока в направлении α = αзв± 90°, считывают отфильтрованный световой поток второй сканирующей апертурой, получают видеосигнал
преобразуют суммарный видеосигнал в световой поток Фн суммарного изображения, осуществляют пространственно-частотную фильтрацию светового потока в направлении α = αзв± 90°, считывают отфильтрованный световой поток второй сканирующей апертурой, получают видеосигнал  производят двухуровнее квантование с порогом Vб и дискретизацию полученного видеосигнала, определяют координаты отсчетов ненулевого дискретизирования видеосигнала
производят двухуровнее квантование с порогом Vб и дискретизацию полученного видеосигнала, определяют координаты отсчетов ненулевого дискретизирования видеосигнала  по строке и кадру, находят минимальные τ
по строке и кадру, находят минимальные τ определяемого из верхней границы блеска объекта, определяют угол α как
определяемого из верхней границы блеска объекта, определяют угол α как
α = arctg[(τ
выделяют объект по превышению порога Vб, определяемого по соотношению величин α и αзв, причем направление совпадает с направлением перемещений звезд в фокальной плоскости телескопа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Подобед В.В., Нестеров В.В | |||
| Общая астрометрия | |||
| -М.: Наука, 1982, с.275, 276, рис.96 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Новая техника в астрономии | |||
| Сб.статей | |||
| -Л.: Наука, 1984, с.39 - 42. | |||
