Изобретение относится к лазерной локации и к квантовой электронике.
Изобретение может быть использовано в лазерных локационных системах для определения формы и размеров космических объектов, контроля космического пространства, определения параметров движения космических объектов искусственного и естественного происхождения и наведения на них лазерного излучения.
Известен способ получения информации о форме и размерах удаленных объектов [1], включающий подсвет объекта лазерным излучением, прием отраженного от объекта излучения, формирование на его основе голограммы, регистрацию голограммы чувствительным многоэлементным телевизионным приемником, усиление и обработку телевизионного сигнала и восстановление голографического изображения наблюдаемого объекта.
Как показано в [1], недостатком такого способа получения информации об объекте является низкая чувствительность, обусловленная большим количеством регистрируемых элементов в голограмме по сравнению с числом элементов разрешения в изображении объекта. При этом собственные шумы и ограниченная чувствительность телевизионных многоэлементных фотоприемников обуславливают низкую чувствительность данного способа и существенно ограничивают дальность действия локационной системы, реализующей указанной способ.
Известен способ оптической локации [2, 3], включающий подсвет объекта, прием отраженного излучения, выделение опорного излучения посредством оптического квантового усилителя, формирование голограммы путем смешения опорного и отраженного от объекта излучения и регистрации голограммы телевизионным фотоприемником. К недостаткам данного способа следует отнести низкую чувствительность при прямой регистрации многоэлементной голограммы телевизионным фотоприемником, что обуславливает низкое качество изображения, получаемого на основе зарегистрированной голограммы, невысокую точность определения размеров и формы объекта, ограниченную дальность действия оптического локатора на основе данного способа.
В качестве прототипа выбран способ лазерной локации [4], заключающийся в формировании лазерного излучения, подсвете им объекта, приеме отраженного от объекта излучения, спектральной селекции и усилении его на рабочей длине волны, разделении усиленного потока излучения на парциальные потоки излучения, измерении среднего уровня флуктуации спонтанного излучения в одном из парциальных потоков излучения, установлении оптимального режима усиления излучения, отраженного от объекта, регистрации парциальных потоков излучения многоэлементными фотоприемниками. Данный способ лазерной локации позволяет реализовать предельную квантовую чувствительность приема сигналов, отраженных от объекта. Однако в этом способе не реализуется возможность получения информации о размерах и форме наблюдаемого объекта.
В качестве прототипа для устройства, реализующего предлагаемый способ лазерной локации, выбрано устройство, реализующее способ-прототип [4].
Достигаемым техническим результатом является повышение точности при определении геометрических размеров и формы наблюдаемого объекта, увеличение разрешающей способности при формировании изображений наблюдаемого объекта и одновременная реализация предельно высокой квантовой чувствительности, повышение точности определения координат наблюдаемого объекта, увеличение дальности действия лазерной локационной системы наблюдения за удаленными малоразмерными космическими объектами.
Новый технический результат достигается следующим.
1. В известном способе, заключающемся в формировании лазерного излучения, подсвете им объекта, приеме отраженного от объекта излучения, спектральной селекции и усиления его на рабочей длине волны, разделении усиленного потока излучения на парциальные потоки излучения, регистрации парциальных потоков излучения многоэлементными фотоприемниками, определяют момент времени прихода отраженного от объекта излучения, формируют стробирующий импульсный сигнал, перед регистрацией подвергают задержке на время tn каждый из разделенных парциальных потоков излучения, осуществляют динамическую временную фильтрацию каждого из задержанных парциальных потоков излучения посредством сформированного стробирующего импульсного сигнала, осуществляют квантовое усиление каждого из динамически отфильтрованных парциальных потоков излучения на рабочей длине волны, после регистрации динамически отфильтрованных и усиленных парциальных потоков излучения формируют совокупность взаимно корреляционных функций между первым зарегистрированным парциальным потоком излучения и каждым из остальных зарегистрированных парциальных потоков излучения, а на основе сформированной совокупности взаимно корреляционных функций судят о размерах и форме наблюдаемого объекта.
2. Время задержки каждого из парциальных потоков излучения tn выбирают из условия tn=t0-(n-1)Δ tc, где t0 - длительность времени формирования стробирующего импульсного сигнала относительно момента прихода отраженного от объекта излучения; Δ tс - длительность стробирующего импульсного сигнала; n - порядковый номер парциального потока излучения, n=1,2,3....
3. Длительность Δ tс стробирующего импульсного сигнала выбирают из условия  где с - скорость света, L0 - пространственная разрешающая способность по линейной координате дальности.
где с - скорость света, L0 - пространственная разрешающая способность по линейной координате дальности.
4. Динамическую временную фильтрацию каждого из задержанных парциальных потоков излучения осуществляют путем стробирования парциального потока излучения на время, равное длительности Δ tc стробирующего импульсного сигнала.
5. В известное устройство, содержащее установленные на первой оптической оси источник лазерного излучения на рабочей длине волны с блоком накачки, поворотное зеркало с приводом и блоком управления привода зеркала, установленные на второй оптической оси приемный телескоп, входом связанный с поворотным зеркалом первый активный квантовый фильтр, первую фокусирующую линзу, многоэлементный фотоприемник и блок обработки информации, управляющие выходы которого подключены к управляющему входу первого активного квантового фильтра, к блоку накачки источника лазерного излучения и к блоку управления поворотным зеркалом, введены М блоков динамической фильтрации, М телевизионных фотоприемников, М фокусирующих линз, блок формирования стробов, М светоделителей, М-1 блоков функциональной обработки, где М≥ 3 (М=3,4,5...). При этом выходы многоэлементного фотоприемника соединены со входами блока формирования стробов, выходы которого подключены к блоку обработки информации и к блокам функциональной обработки, оптические входы блоков динамической фильтрации посредством светоделителей оптически связаны с оптическим выходом первого активного квантового фильтра, оптические выходы блоков динамической фильтрации оптически связаны посредством фокусирующих линз с оптическими входами телевизионных фотоприемников, выходы которых подсоединены к блокам функциональной обработки, выходами подключенных к блоку обработки информации.
6. Блок динамической фильтрации содержит последовательно установленные на оптической оси оптически связанные оптическую линию задержки, первый оптический затвор, второй активный квантовый фильтр, второй оптический затвор и блок управления оптическими затворами, выходы которого присоединены к управляющим электродам оптических затворов, а вход соединен с выходом блока формирования стробов, управляющий вход второго активного квантового фильтра подсоединен к выходу блока обработки информации.
7. Оптическая линия задержки содержит последовательно установленные на оптической оси входную диафрагму, первую и вторую согласующие линзы, и выходную диафрагму.
8. Блок формирования стробов содержит электронные усилители, пороговые элементы, блок суммирования, ячейки формирования импульсов и регистр памяти, при этом входы электронных усилителей подсоединены к выходам многоэлементного фотоприемника, а выходы через пороговые элементы подключены ко входам блока суммирования, выход которого присоединен к ячейкам формирования импульсов, выходы пороговых элементов подключены ко входам регистра памяти, выход которого подсоединен ко входам блоков функциональной обработки, выходы ячеек формирования импульсов подсоединены к управляющим входам блоков управления оптическими затворами в блоках динамической фильтрации, управляющие входы ячеек формирования импульсов подсоединены к выходам блока обработки информации.
9. Блок функциональной обработки содержит регистры памяти, первый, второй и третий процессоры быстрого преобразования Фурье (БПФ) и перемножитель, при этом входы регистров памяти подсоединены к выходам телевизионных фотоприемников и к выходу регистра памяти в блоке формирования стробов, а выходы подсоединены ко входам первого и второго процессоров БПФ, выходы которых подсоединены ко входам перемножителя, выходом соединенного со входом третьего процессора БПФ, выход которого подключен к блоку обработки информации.
При изложении работы устройства, реализующего способ, в качестве примера рассмотрено устройство с параметром М=3.
На фиг.1 приведена блок-схема локационного устройства, реализующего предложенный способ лазерной локации, где введены следующие обозначения:
1. Источник лазерного излучения на рабочей длине волны λ раб.
2. Блок накачки.
3. Поворотное зеркало.
4. Привод и блок управления поворотным зеркалом.
5, 6. Приемный телескоп:
5. Вогнутое зеркало телескопа.
6. Выпуклое зеркало телескопа.
7. Активный квантовый фильтр (АКФ).
8. Первая фокусирующая линза.
9. Многоэлементный фотоприемник (МФП).
10. Блок формирования стробов (БФС).
11. Первый блок динамической фильтрации (БДФ).
12, 13. Второй и третий блоки динамической фильтрации.
14. Первый светоделитель.
15, 16. Второй и третий светоделители.
17. Оптическая линия задержки (ОЛЗ).
18. Первый оптический затвор.
19. Второй оптический затвор.
20. Блок управления оптическими затворами.
21. Второй активный квантовый фильтр.
22. Вторая фокусирующая линза.
23. Первый телевизионный фотоприемник (ТФП).
24, 26. Третья и четвертая фокусирующие линзы.
25, 27. Второй и третий ТФП.
28. Первый блок функциональной обработки (БФО 1).
29. Второй блок функциональной обработки (БФО 2).
30. Блок обработки информации.
31. Блок-распределитель сигналов внешнего целеуказания (в состав устройства не входит)
На фиг.2 представлена блок-схема блока формирования стробов (БФС), представленного на фиг.1 позицией 10.
БФС на фиг.2 содержит следующие элементы:
32. Электронные усилители.
33. Пороговые элементы.
34. Блок суммирования.
35, 36, 37. Ячейки формирования импульсов.
48. Регистр памяти.
Блок-схема блока динамической фильтрации приведена на фиг.1 поз.11.
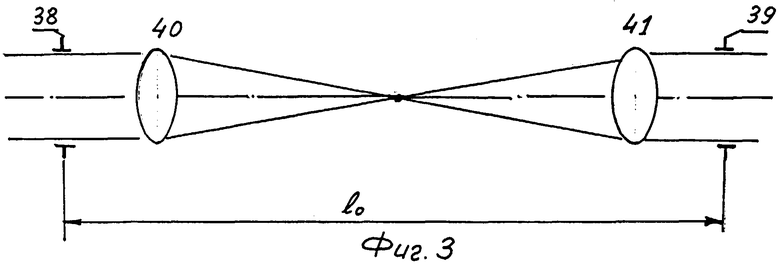
На фиг.3 представлена блок-схема оптической линии задержки, входящей в блоки динамической фильтрации поз.11, 12, 13 на фиг.1. Оптическая линия задержки на фиг.1 представлена позицией 17.
На фиг.3 оптическая линия задержки содержит следующие элементы:
38, 39. Входная и выходная диафрагмы.
40, 41. Согласующие линзы.
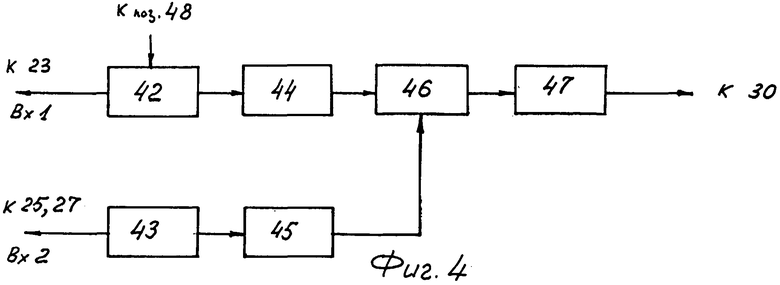
На фиг.4 приведена блок-схема блока функциональной обработки, представленного на фиг.1 поз.28, 29.
Блок функциональной обработки на фиг.4 содержит следующие элементы:
42, 43. Регистры памяти.
44, 45, 47. Первый, второй и третий процессоры быстрого Фурье-преобразования (БПФ).
46. Перемножитель.
Принцип действия и реализация предлагаемого способа заключаются в следующем.
По данным внешнего целеуказания (ВЦУ) от блока 31 в блок обработки информации 30 поступает информация об ожидаемых угловых координатах объекта. По предполагаемым угловым координатам объекта блок обработки 30 вырабатывает команды, поступающие в блок управления приводом 4 поворотного зеркала 3, в результате чего последнее ориентируют в направлении предполагаемого нахождения объекта. Осуществляют формирование импульса лазерного излучения с помощью источника лазерного излучения 1 - лазерного генератора, управляемого блоком накачки 2. Осуществляют подсвет области нахождения объекта сформированным импульсом лазерного излучения. Прием отраженного от объекта излучения осуществляют посредством поворотного зеркала 3 и приемного телескопа 5, 6. Приемный телескоп состоит из вогнутого зеркала 5 и выпуклого зеркала 6, которые осуществляют уменьшение диаметра пучка принимаемого излучения D1 до диаметра рабочей зоны D2 первого активного квантового фильтра 7 (АКФ). АКФ 7 осуществляет спектральную селекцию и усиление отраженного от объекта излучения на рабочей длине волны λ раб. Далее осуществляют разделение усиленного потока излучения с выхода АКФ 7 на парциальные потоки излучения посредством первого 14, второго 15 и третьего 16 светоделителей. Коэффициенты пропускания светоделителей подобраны такими, что на последующие за светоделителями элементы 11, 12, 13, 8 поступают приблизительно одинаковые по интенсивности парциальные световые потоки. Один из парциальных световых потоков, поступающий на оптический вход первой фокусирующей линзы 8, с помощью последней фокусируется на фоточувствительной площадке многоэлементного фотоприемника 9. Остальные три парциальных световых потока поступают на входы блоков динамической фильтрации 11, 12, 13. Посредством многоэлементного фотоприемника 9 (МФП) осуществляют регистрацию первого парциального светового потока, сфокусированного первой линзой 8. При этом размер одного чувствительного элемента d0 в МФП 9 соответствует дифракционному углу приема АКФ 7  , d0=fLQg (1), где fL - фокусное расстояние первой фокусирующей линзы 8, Qg - плоский дифракционный угол приема излучения, соответствующий диаметру рабочей зоны D2 АКФ 7. При данном соотношении геометрических размеров АКФ, МФП и fL линзы 8 и при обеспечении достаточно высокого коэффициента усиления излучения в АКФ 7 К0>103 чувствительность приемного канала АКФ 7 - МФП 9, как показано в [5], достигает квантового предела и позволяет обеспечить регистрацию отдельных квантов излучения, поступающих на вход АКФ 7. При этом уменьшение уровня интенсивности при разделении усиленного излучения на выходе АКФ 7 на отдельные парциальные световые потоки компенсируется соответствующим увеличением коэффициента усиления АКФ 7 и не влияет на чувствительность локационного устройства в целом.
, d0=fLQg (1), где fL - фокусное расстояние первой фокусирующей линзы 8, Qg - плоский дифракционный угол приема излучения, соответствующий диаметру рабочей зоны D2 АКФ 7. При данном соотношении геометрических размеров АКФ, МФП и fL линзы 8 и при обеспечении достаточно высокого коэффициента усиления излучения в АКФ 7 К0>103 чувствительность приемного канала АКФ 7 - МФП 9, как показано в [5], достигает квантового предела и позволяет обеспечить регистрацию отдельных квантов излучения, поступающих на вход АКФ 7. При этом уменьшение уровня интенсивности при разделении усиленного излучения на выходе АКФ 7 на отдельные парциальные световые потоки компенсируется соответствующим увеличением коэффициента усиления АКФ 7 и не влияет на чувствительность локационного устройства в целом.
Далее на основе первого парциального светового потока, зарегистрированного в МФП 9, осуществляют определение момента времени прихода излучения, отраженного от объекта, и формируют стробирующий импульсный сигнал с фиксированной длительностью Δ tc.
Указанную операцию осуществляют с помощью блока формирования стробов (БФС) 10.
Электрические сигналы с выходов отдельных парциальных фотоэлементов МФП 9 поступают на соответствующие электронные усилители 32, входящие в состав БФС 10 (см. фиг.2). С выходов электронных усилителей 32 усиленные сигналы поступают на входы соответствующих пороговых элементов 33, каждый из которых формирует импульс превышения порогового уровня, при условии, если сигнал с выхода соответствующего усилителя 32 превышает пороговый уровень, заданный в пороговых элементах 33. Таким образом, в момент времени прихода оптического сигнала, отраженного от объекта, один или несколько пороговых элементов 33 формируют на своих выходах импульс превышения порогового уровня, характеризующий обнаружение сигнала от объекта и содержащий информацию о моменте времени прихода сигнала от объекта по переднему фронту оптического сигнала, отраженного от передней (ближней) части объекта по отношению к зондирующему излучению, сформированному источником лазерного излучения 1.
С помощью блока суммирования 34 осуществляют электрическое суммирование сигналов с выходов пороговых элементов 33. Ячейки формирования импульсов 35, 36, 37 осуществляют формирование стробирующих импульсных сигналов, поступающих на управляющие входы соответствующих блоков динамической фильтрации 11, 12, 13. Все стробирующие импульсные сигналы имеют одинаковую длительность Δ tc, задаваемую внутренними параметрами ячеек формирования импульсов 35-37 и параметром управляющего сигнала, поступающего от блока обработки информации 30. Начало каждого стробирующего импульсного сигнала совпадает по времени с передним фронтом суммарного сигнала на выходе сумматора 34. Таким образом, момент времени формирования каждого из стробирующих импульсных сигналов на выходах ячеек 35-37 определяется и совпадает по времени с моментом появления на выходе АКФ 7 оптического излучения (сигнала), отраженного от передней части наблюдаемого и обнаруженного объекта. Сформированные стробирующие импульсные сигналы используют далее для осуществления динамической временной фильтрации парциальных потоков излучения.
Далее осуществляют раздельную обработку каждого из парциальных потоков излучения, сформированных после квантового усиления излучения в АКФ 7 посредством светоделительных элементов 14, 15, 16. Каждый парциальный поток излучения подвергают задержке на время

где t0 - длительность времени формирования стробирующего импульсного сигнала в блоке формирования стробов (БФС)10;
Δ tс - длительность стробирующего импульсного сигнала, обусловленная параметрами ячеек формирования импульсов 35-37;
n - порядковый номер каждого из задерживаемых парциальных потоков излучения.
При этом первым задерживаемым парциальным потоком излучения с n=1 условно принимается поток излучения, поступающий на вход первого блока динамической фильтрации (БДФ)11, второй (n=2) и третий (n=3) парциальные потоки излучения поступают на входы, соответственно, второго и третьего БДФ 12, 13.
Задержку по времени осуществляют с помощью оптических линий задержки 17, входящих в состав каждого БДФ 11, 12, 13. Следует отметить, что состав и устройство каждого из БДФ 11-13 одинаковы, поэтому на фиг.1 показана схема только одного БДФ 11. Оптическая линия задержки 17 представлена на фиг.3 и содержит входную и выходную диафрагмы 38,39, первую и вторую согласующие линзы 40, 41, которые осуществляют проектирование потока излучения от входной 38 до выходной 39 диафрагм с сохранением геометрических размеров потока (пучка) излучения. Задержка на время tn (2) осуществляется за счет конечного времени распространения  , с - скорость света. Для получения заданной величины задержки по времени в соответствии с (2) выбирают рабочую длину L0 оптической линии задержки 17 в соответствии с соотношением:
, с - скорость света. Для получения заданной величины задержки по времени в соответствии с (2) выбирают рабочую длину L0 оптической линии задержки 17 в соответствии с соотношением:

При этом рабочая длина L0 для каждой отдельной линии задержки, входящей в соответствующий блок динамической фильтрации 11-13, выбирается согласно соотношению (3) и определяется номером n=1, 2, 3 соответствующего обрабатываемого парциального потока излучения.
Далее осуществляют динамическую временную фильтрацию каждого из задержанных парциальных потоков излучения с порядковыми номерами n=1, 2, 3 посредством оптического затвора 18 в первом БДФ 11 и в остальных БДФ 12, 13. Динамическую фильтрацию осуществляют посредством сформированных стробирующих импульсных сигналов, каждый из которых с выходов БФС 10 поступает на соответствующий управляющий вход БДФ 11-13, а именно: на вход блока управления 20 оптическими затворами 18, 19. Каждый оптический затвор 18, 19 находится в нормально закрытом состоянии и открывается под воздействием стробирующего импульсного сигнала и на время Δ tc (2) - длительности данного сигнала. В результате после прохождения оптического затвора 18 на его выходе образуется динамически отфильтрованный световой поток, содержащий излучение, отраженное от части наблюдаемого объекта в пределах промежутка времени Δ tc - длительности соответствующего стробирующего импульсного сигнала, поданного на управляющий электрод оптического затвора 18 с выхода блока управления оптическими затворами 20. Для первого блока динамической фильтрации 11 и первого парциального потока излучения с порядковым номером n=1 рабочая длина L0=ct0, соответственно, время задержки равно
 , что соответствует только времени формирования первого стробирующего сигнала в БФС 10, а также времени задержки оптического сигнала в многоэлементном фотоприемнике 9, которое включено и учтено в величине промежутка времени t0. В результате этого в пределах промежутка времени Δ tc, когда оптический затвор 18 открыт, через него проходит излучение, отраженное от передней части наблюдаемого объекта Δ Z1=cΔ tc.
, что соответствует только времени формирования первого стробирующего сигнала в БФС 10, а также времени задержки оптического сигнала в многоэлементном фотоприемнике 9, которое включено и учтено в величине промежутка времени t0. В результате этого в пределах промежутка времени Δ tc, когда оптический затвор 18 открыт, через него проходит излучение, отраженное от передней части наблюдаемого объекта Δ Z1=cΔ tc.
В остальных блоках динамической фильтрации 12, 13 аналогичным образом с помощью оптических затворов 18 осуществляют динамическую фильтрацию и выделение потоков излучения, отраженных от последующих частей наблюдаемого объекта, смещенных по глубине на расстояния соответственно установленной задержке по времени на величину

При этом размер выделенного участка объекта, от которого отфильтровывают отраженное излучение, по глубине составляет прежнюю величину Δ Z=cΔ tc. В результате динамической временной фильтрации на выходах блоков динамической фильтрации 11-13 образуют набор потоков излучения, представляющих собой “срезы” поверхности объекта глубиной Δ Z=сΔ tс, эквидистантно расположенные перпендикулярно оси диаграммы направленности зондирующего излучения, которым был подсвечен объект. Динамически отфильтрованный поток излучения с выхода оптического затвора 18 (после прохождения через затвор 18) подвергают квантовому усилению посредством второго активного квантового фильтра 21. На выходе АКФ 21 установлен второй оптический затвор 19, посредством которого осуществляют временное стробирование усиленного потока излучения с выхода АКФ 21. Второй оптический затвор 19 работает аналогично первому оптическому затвору 18, открывается и закрывается синхронно с затвором 18 на время прохождения усиленного в АКФ 21 потока излучения. Оптический затвор 19 обеспечивает исключение влияния собственных спонтанных шумов АКФ 21 на последующий высокочувствительный телевизионный фотоприемник (ТФП) 23. Вторая фокусирующая линза 22 осуществляет фокусировку динамически отфильтрованного потока излучения на фоточувствительной площадке телевизионного фотоприемника 23.
С помощью последнего осуществляют регистрацию динамически отфильтрованного и усиленного потока излучения. Аналогичным образом осуществляют динамическую фильтрацию, усиление и регистрацию парциальных световых потоков в БДФ 12, 13 и в ТФП 25, 27. При этом размер одного чувствительного элемента d в ТФП 23, 25, 27 соответствует дифракционному углу приема АКФ 7,21:  ,
,
где fL - фокусное расстояние линз 22, 24, 26; D2 - диаметр рабочей зоны АКФ 7,21, заполненной активным веществом. Каждый из телевизионных приемников 23, 25, 27 регистрирует динамически отфильтрованный и дополнительно усиленный парциальный поток излучения с распределением интенсивности Yn(x,y), где n=1, 2, 3, - порядковый номер потока излучения, соответствующий ТФП, в котором данный поток зарегистрирован: n=1 соответствует ТФП 23; n=2 - ТФП 25, n=3 - ТФП 27. Далее осуществляют функциональную обработку потоков излучения, зарегистрированных в ТФП 23, 25, 27, посредством первого и второго блоков функциональной обработки (БФО) 28, 29. Функциональная обработка потоков излучения, зарегистрированных в ТФП 23, 25, 27, заключается в том, что формируют взаимно корреляционные функции между первым парциальным динамически отфильтрованным и усиленным световым потоком с распределением интенсивности Y1(x,y), зарегистрированным в ТФП 23, и остальными световыми потоками с распределением Y2(х,y) и Y3(х,y), зарегистрированными, соответственно, в ТФП 27. Для формирования взаимно корреляционных функций на один из входов БФО 28, 29 с выхода первого ТФП 23 подают сигнал, содержащий распределение Y1(x,y) первого потока излучения. На вторые входы БФО 28, 29 с выходов ТФП 25, 27 подают, соответственно, распределения Y2(x,y), Y3(х,у). В БФО 28, 29 в цифровой форме формируют первую и вторую взаимно корреляционные функции K1(x,y), К2(x,y):

Далее сформированные взаимно корреляционные функции K1(x,y), K2(x,y) в форме электрических сигналов поступают с выходов БФО 28, 29 в блок обработки информации 30, где отображаются на дисплее, входящем в состав блока 30.
На этом операции по обработке излучения отраженного от наблюдаемого объекта и реализации способа лазерной локации завершаются. Полученная информация в виде взаимно корреляционных функций отдельных пространственных сечений объекта наблюдается визуально на дисплее блока обработки информации 30 и может передаваться внешним потребителям для определения геометрической формы и размеров объекта и его распознавания.
Взаимно корреляционные функции (6) формируют следующим образом.
С выхода ТФП 23 на первые входы БФО 28,29 поступает распределение Y1(x,y) первого потока излучения (n=1) в цифровой (или аналоговой) форме в виде двумерного массива информации, соответствующего двумерной телевизионной картине распределения Y1(x,y), зарегистрированного ТФП 23. Соответственно, сигналы распределения Y2(x,y), Y3(х,у) поступают на вторые входы БФО. Поступающие распределения регистрируются в регистрах памяти 42, 43. С выходов регистров памяти 42, 43 данные распределения поступают соответственно на входы процессоров 44, 45. Последние формируют в цифровой форме двумерные Фурье-спектры

где F – оператор двумерного Фурье-преобразования.
Процессор БПФ 44 при формировании Фурье-спектра Ф1(ω х,у) распределения Y1(x,y) первого потока излучения выделяет в цифровой форме комплексно-сопряженную составляющую Фурье-спектра Ф1*(ω х,у), содержащуюся в цифровом двумерном спектре  .
.
Перемножитель 46 осуществляет формирование произведений следующего вида (в соответствующих БФО 28, 29):

Далее произведения P1, Р2 подвергают обратному Фурье-преобразованию в третьем процессоре БПФ 47, на выходе которого формируют функцию взаимной корреляции (6) в соответствии с известным соотношением между функцией корреляции и произведением Фурье-спектров:

Полученные в цифровой форме на выходе БПФ процессора 47 в БФО 28, 29 двумерные распределения (9) представляют собой взаимно корреляционные функции, соответствующие соотношениям (6).
Сформированные двумерные взаимно корреляционные функции (9) обладают следующими особенностями. Зарегистрированный первым ТФП 23 динамически отфильтрованный световой поток Y1(x,y), представляет собой распределение излучения, отраженного от передней части наблюдаемого объекта, обращенной к подсвечивающему объект зондирующему лазерному излучению, причем протяженность этой передней части объекта Lz по координате z, параллельной направлению вектора направленности лазерного излучения, подсвечивающего объект, равна Lz=Δ tc, где с - скорость света, Δ tc - длительность стробирующего импульсного сигнала, сформированного блоком формирования стробов 10. Таким образом, протяженность (глубина) передней части объекта Lz по координатам дальности z соответствует расстоянию, которое проходит зондирующий световой сигнал за время действия стробирующего импульсного сигнала Δ tc на оптический затвор 18, т.е. за время нахождения затвора 18 в открытом состоянии. Длительность стробирующего импульсного сигнала Δ tc определяет при этом разрешающую способность L0 по линейной координате дальности z: L0=Lz=cΔ tc. Соответственно, чем меньше длительность Δ tc, тем меньше протяженность по координате z (глубина) передней выделенной части наблюдаемого объекта Lz=L0=cΔ tc и тем выше разрешающая способность по линейной координате при получении информации о форме и размерах наблюдаемого объекта. Длительность Δ tc стробирующего импульсного сигнала, формируемого и определяемого блоком формирования стробов 10, выбирают исходя из заданной внешними потребителями желаемой величины разрешающей способности по линейной координате дальности L0 в соответствии с условием:  .
.
Заданную величину длительности Δ tс устанавливают выбором соответствующих параметров БФС 10 программно автоматически по командам, поступающим в БФС 10 от блока обработки информации 30. Распределение Y1(x,y), зарегистрированное ТФП 23, представляет собой двумерную свертку изображения упомянутой передней части наблюдаемого объекта S1(x,y) в картинной плоскости объекта и импульсной передаточной характеристики g0(x,y) атмосферной трассы распространения излучения:

где знак “* ” означает операцию двумерной свертки. Картинная плоскость объекта соответствует плоскости, проведенной через переднюю точку объекта и перпендикулярной линии визирования объекта относительно точки расположения локационного устройства, т.е. перпендикулярной оси дальности z. Таким образом, разрешающая способность локационного устройства по двум другим координатам х,y в получаемом изображении наблюдаемого объекта определяется двумя независимыми факторами: параметром g0(x,y) атмосферы и размером S1(x,y) выделенной при динамической временной фильтрации передней части наблюдаемого объекта. При уменьшении длительности Δ tc стробирующего импульсного сигнала уменьшается протяженность (глубина) Lz выделенной передней части объекта, т.е. повышается потенциальная разрешающая способность локационного устройства по двум координатам х,y, соответствующим картинной плоскости объекта. Данная потенциальная разрешающая способность в изображении наблюдаемого объекта реализуется при формировании указанных взаимно корреляционных функций (9) при обработке в БФО 28, 29 двумерных распределений Y2, Y3, зарегистрированных в ТФП 25, 27. Действительно, с учетом соотношения (10), сформированные в процессорах БПФ 44, 45 распределения Фурье-спектров световых потоков Y1, 2, 3 можно представить в форме:

где 
S1,2,3(х,у) - изображения выделенных в результате динамической фильтрации в БДФ 11-13 сечений наблюдаемого объекта, соответствующих потокам излучения, зарегистрированным в ТФП 23, 25, 27. G(ω х,у) - пространственный Фурье-спектр импульсной передаточной характеристики g0(x,y) атмосферного канала распространения излучения.
В результате перемножения распределений Ф* 1(ω х,у) и Ф2,3(ω х,у) в (11) с помощью перемножителя 46 осуществляется взаимная компенсация атмосферной спектральной функции G(ω х,у) в произведениях P1,2 (8):

В двумерном произведении G* (ω х,y)G(ω х,y) атмосферные искажения взаимно скомпенсированы, в результате чего обратное Фурье–преобразование  представляет собой неискаженную импульсную передаточную характеристику приемной оптической системы. Соответственно, сформированные на выходе процессора БПФ 47 в БФО 28,29 в соответствии с (9) обратные Фурье-преобразования от произведений P1, P2 представляют собой неискаженные атмосферными флуктуациями взаимно корреляционные функции вида (9), где вместо Y1,2,3(x,y) следует подставить выделенные в результате динамической фильтрации неискаженные изображения S1,2,3,(х,у) передней части объекта и его последующих сечений плоскостями, перпендикулярными линии визирования - оси дальности Z. Таким образом, сигналы на выходах БФО 28, 29 можно представить в следующем виде:
представляет собой неискаженную импульсную передаточную характеристику приемной оптической системы. Соответственно, сформированные на выходе процессора БПФ 47 в БФО 28,29 в соответствии с (9) обратные Фурье-преобразования от произведений P1, P2 представляют собой неискаженные атмосферными флуктуациями взаимно корреляционные функции вида (9), где вместо Y1,2,3(x,y) следует подставить выделенные в результате динамической фильтрации неискаженные изображения S1,2,3,(х,у) передней части объекта и его последующих сечений плоскостями, перпендикулярными линии визирования - оси дальности Z. Таким образом, сигналы на выходах БФО 28, 29 можно представить в следующем виде:

где δ (х,у) - импульсная передаточная характеристика приемной оптической системы локационного устройства;
“* ” - оператор свертки;

 - оператор Фурье-преобразования.
- оператор Фурье-преобразования.
Каждая из взаимно корреляционных функций K1(x,y), K2(x,y) содержит информацию о неискаженном изображении S2,3(х,у) сечения наблюдаемого объекта плоскостями, перпендикулярными линии визирования объекта - оси дальности Z. Глубина этих сечений - протяженность по оси дальности Δ Lz - определяется, как было отмечено выше, длительностью Δ tс соответствующего стробирующего сигнала, сформированного в БФС 10, с помощью которого данное сечение было выделено - динамически отфильтровано с помощью БДФ 12, 13. Собственно двумерное распределение K1,2(x,y) представляет собой совокупность дискретных квазиточечных элементов δ 1(х,у), обусловленных взаимной корреляцией между изображением выделенной передней части S1(x,y) наблюдаемого объекта и отдельными элементарными участками δ n(х,y) соответствующих сечений S2,3(х,у) объекта, причем S2,3(х,y)= (х,y).(14).
(х,y).(14).
Таким образом, изображение S1(x,y) передней части наблюдаемого объекта является дополнительной импульсной характеристикой приемной оптической системы (совместно с δ (х,y)), с помощью которой осуществляют построение неискаженных атмосферными флуктуациями изображений сечений наблюдаемого объекта. Разрешающая способность в таких изображениях сечений S2,3(х,y) при формировании взаимно корреляционных функций (13) может быть улучшена, как было отмечено выше, путем уменьшения размера передней части объекта S1(x,y), т.е. путем уменьшения длительности Δ tc стробирующего импульсного сигнала. Уменьшением величины Δ tc разрешающую способность в распределении K1,2(x,y) можно улучшить до теоретического предела, обусловленного размером импульсной передаточной характеристики δ (х,y) приемной оптической системы локационного устройства. При уменьшении размера передней части S1(x,y) наблюдаемого объекта путем уменьшения длительности стробирующего импульса Δ tc единственным физическим ограничением является чувствительность регистрирующего телевизионного фотоприемника ТФП 23, а также ТФП 25, 27. В предложенном способе динамическую фильтрацию принимаемых от объекта потоков излучения осуществляют после предварительного их квантового усиления в АКФ 7, при этом после динамической фильтрации осуществляют вторичное квантовое усиление отфильтрованных потоков излучения в АКФ 21. В результате реализуют предельную квантовую чувствительность в зарегистрированном в ТФП 23 (25,27) потоке излучения, которая определена только дискретной (квантовой) природой оптического излучения и позволяет регистрировать отдельные кванты излучения, отраженные от передней части объекта и отдельных сечений объекта. Предельная квантовая чувствительность при реализации способа обеспечивает, соответственно, возможность уменьшения величины Δ tc и реализации предельно высокой потенциально возможной разрешающей способности в изображениях сечений наблюдаемого объекта. При этом атмосферные флуктуации в полученных изображениях сечений объекта - взаимно корреляционных функциях K1,2(x,y) - являются скомпенсированными и исключенными и не влияют на реализуемую высокую разрешающую способность. Реализованная высокая разрешающая способность в изображениях сечений S2,3(х,y) позволяет повысить точность определения геометрических размеров и формы наблюдаемого объекта по размерам и форме данных сечений, а также синтезировать и сформировать трехмерное (объемное) изображение объекта в виде совокупности отдельных сечений объекта, наблюдаемых на специальном трехмерном дисплее, или по отдельности. Реализованная в данном способе высокая пространственная разрешающая способность при регистрации отфильтрованных потоков излучения в ТФП 23 (25,27) позволяет также увеличить размеры поля зрения, наблюдаемого с помощью ТФП 23, увеличить точность определения пространственных (угловых) координат наблюдаемого объекта, его отдельных элементов и других объектов, попадающих в поле зрения ТФП 23 (25,27) и всего приемного канала локационного устройства, реализующего способ.
Более высокая точность в определении геометрических размеров и формы отдельных сечений объекта и всего наблюдаемого объекта в целом позволяет использовать полученную информацию для распознавания объекта с высокой вероятностью достоверного определения принадлежности наблюдаемого объекта к соответствующему классу объектов.
В локационном устройстве, реализующем способ лазерной локации, предусмотрено расширение функциональных возможностей при получении информации о координатах и геометрической форме наблюдаемого объекта.
При формировании стробирующего импульсного сигнала Δ tс в ячейках формирования импульсов 35-37 в БФС 10 предусмотрена возможность индивидуального установления длительности Δ tcn для каждого из потоков излучения с порядковым номером n, поступающих на входы БДФ 11, 12, 13. В этом случае протяженность (глубина) выделенного сечения объекта Δ Lz по координате z будет различной для отдельных сечений, что позволяет с большей или, соответственно, меньшей подробностью наблюдать и определять форму отдельного сечения объекта и составляющих его элементов. Одновременно с этим возможно введение дополнительной временной задержки в каждый сформированный стробирующий импульсный сигнал в соответствии с соотношением (2). При этом необходимая для каждого потока излучения временная задержка Δ tcn формируется в соответствующих ячейках формирования импульсов 35, 36, 37, а оптические линии задержки 17, входящие в БДФ 11-13, осуществляют единую для всех потоков излучения фиксированную по величине временную задержку излучения t0. Управление конкретными величинами длительностей Δ tc стробирующих импульсов и величиной их задержки по времени осуществляют программно по сигналам с выхода блока обработки информации 30, поступающим на ячейки формирования импульсов 35-37. В блоке формирования стробов 10 (Фиг.2) предусмотрен регистр памяти 48, в котором регистрируют сигналы, поступающие по отдельности с выходов всех пороговых элементов 33. В локационном устройстве предусмотрена возможность передачи сигнала с выхода данного регистра памяти 48 на второй вход одного из блоков функциональной обработки 28. В результате на выходе БФО 28 формируют взаимно корреляционную функцию потоков излучения, выделенного от передней части наблюдаемого объекта S1(x,y), и потока излучения от всего объекта в целом. Это позволяет использовать для получения информации о форме и размерах объекта суммарное неискаженное атмосферными флуктуациями изображение объекта.
Использование в предложенном способе лазерной локации операций квантового усиления, а в реализующем его устройстве - квантового усилителя - активного квантового фильтра 7,21, - обеспечивает одновременно получение предельно высокой (дифракционной) разрешающей способности при реализации предельной физически возможной чувствительности, ограниченной квантовым пределом. При этом в дифракционном угле приемной апертуры регистрируется в среднем один фотон, отраженный от соответствующего элемента (области) наблюдаемого объекта. Для обеспечения предельно возможной дифракционной разрешающей способности приемного канала локационного устройства, содержащего АКФ 7,21 фокусирующие линзы 22, 24, 26, приемный телескоп 5, 6, геометрический размер одного фоточувствительного элемента в телевизионных фотоприемниках ТФП 23, 25, 27 и в могоэлементном фотоприемнике МФП 9 должен соответствовать дифракционному углу приема указанного приемного канала. При этом указанный размер одного фоточувствительного элемента целесообразно выбрать несколько меньшим дифракционного размера кружка рассеивания приемного канала для полного исключения влияния собственной разрешающей способности ТФП и МФП на разрешающую способность и точность определения геометрических размеров и формы наблюдаемого объекта. Далее покажем, что чувствительность приемного канала локационного устройства, реализующего предложенный способ, остается при этом на прежнем уровне и позволяет реализовать регистрацию отдельных квантов и предельную квантовую чувствительность при приеме отраженных от объекта оптических сигналов в приемном угле, меньшем дифракционного.
В [5, 6] было показано, что чувствительность лазерного приемного устройства (ЛПУ), состоящего из активного квантового фильтра (АКФ) с шириной спектральной линии на полувысоте от максимума Δ ν

где Nmin - минимальное обнаружимое число фотонов в импульсе; m - отношение сигнал/шум;  g(ν -ν 21) - форм-фактор линии усиления; ν 21 - частота лазерного перехода;
g(ν -ν 21) - форм-фактор линии усиления; ν 21 - частота лазерного перехода;  =1/g(0) - эффективная ширина линии, которая связана с Δ ν
=1/g(0) - эффективная ширина линии, которая связана с Δ ν  а для лоренцева - как
а для лоренцева - как  К0 - коэффициент усиления в максимуме линии; Кs - коэффициент усиления сигнала (если частота сигнала совпадает с центром спектральной линии, a τ scΔ ν
К0 - коэффициент усиления в максимуме линии; Кs - коэффициент усиления сигнала (если частота сигнала совпадает с центром спектральной линии, a τ scΔ ν



функция Релея; J0 и J1 - функции Бесселя.
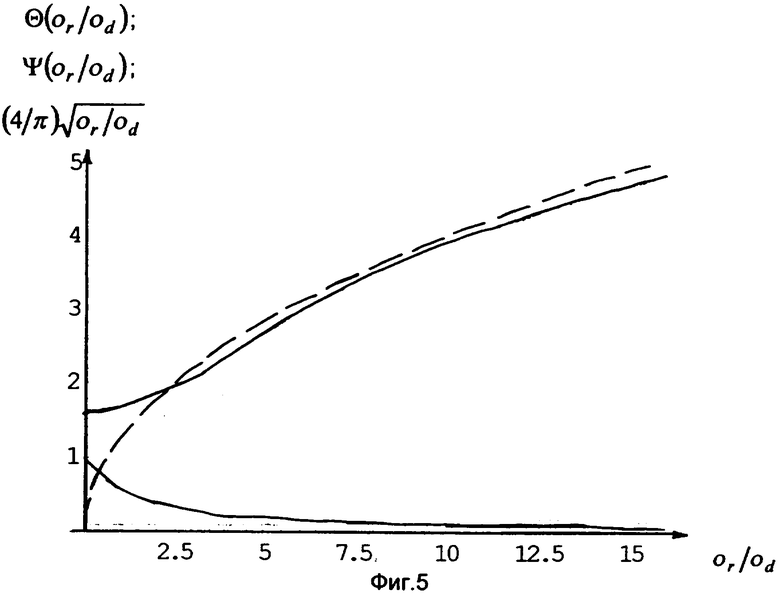
Формула (15) получена в пренебрежении всеми шумами, кроме квантового шума АКФ. Это возможно, если коэффициент усиления АКФ превышает определенное значение [5, 6]. В таком идеализированном случае зависимость Nmin от угла приема будет определяться зависимостью от отношения угла приема к дифракционному углу функции Θ . Зависимости Θ , а также и функции ψ от  показаны на фиг.5, где приведены зависимости ψ (
показаны на фиг.5, где приведены зависимости ψ ( ) (нижняя сплошная кривая 1), Θ (
) (нижняя сплошная кривая 1), Θ ( ) (верхняя сплошная кривая 2). Штриховая кривая 3 изображает зависимость (4/π )
) (верхняя сплошная кривая 2). Штриховая кривая 3 изображает зависимость (4/π ) .
.
Мы видим, что если  → 0, то Θ (
→ 0, то Θ ( )→ (4/π )2≈1,62. Это значение практически не отличается от значения Θ , имеющего место при
)→ (4/π )2≈1,62. Это значение практически не отличается от значения Θ , имеющего место при  ≈ 1, то есть при равенстве угла приема дифракционному углу. Если
≈ 1, то есть при равенстве угла приема дифракционному углу. Если  >>1, то Θ (
>>1, то Θ ( )≅ (4/π )
)≅ (4/π ) . Предельное при малых углах приема значение Nmin, в дальнейшем обозначаемое как
. Предельное при малых углах приема значение Nmin, в дальнейшем обозначаемое как  , определяется формулой:
, определяется формулой:

Таким образом, мы приходим к выводу, что в ЛПУ даже в случае, когда угол приема существенно меньше дифракционного, всегда существуют такие значения коэффициента усиления, при которых чувствительность остается практически такой же, что и при угле приема, равном дифракционному углу.
Действительно, в случае учета дробовых шумов фототока, обусловленных как спонтанным излучением АКФ, так и приходящим сигналом, а также при учете темнового тока фотоприемника, тепловых шумов на резистивных элементах и шумов электронного усилителя формула для Nmin, как следует из работы [6], будет иметь вид:

где γ =τ eПe; Пе - полоса пропускания электронного усилителя (в герцах) на уровне 1/ от максимума модуля его коэффициента усиления (обычно γ немного меньше 0,5); Т - коэффициент пропускания оптического тракта; Nql= 2m2F/η - квантовый предел чувствительности фотоприемника прямого детектирования; η - его квантовая эффективность, а F - его коэффициент шума;
от максимума модуля его коэффициента усиления (обычно γ немного меньше 0,5); Т - коэффициент пропускания оптического тракта; Nql= 2m2F/η - квантовый предел чувствительности фотоприемника прямого детектирования; η - его квантовая эффективность, а F - его коэффициент шума;




idc - среднее значение темнового тока; М - коэффициент умножения фотодиода; R - сопротивление эквивалентного резистора; Tr -температура резистора; Ie*
Формула (20) переходит в формулу (15), если выполняются условия


Если пренебречь шумами электронного усилителя, которые заведомо меньше шумов, обусловленных темновым током, то из этих условий получаются следующие условия на коэффициент усиления (см. также [6])


Так как при 5· 104 < К0 <5· 108 величина  а
а  [1,2], то если F ≈ 10; η =0.5; γ ≈ 0,5; Т≅ 1; idc≤2· 10-7 A;
[1,2], то если F ≈ 10; η =0.5; γ ≈ 0,5; Т≅ 1; idc≤2· 10-7 A;  то с учетом того, что при ξ r/ξ d<<1 функция ψ ≈ 1, получаем из первого условия
то с учетом того, что при ξ r/ξ d<<1 функция ψ ≈ 1, получаем из первого условия
 а из второго
а из второго 
Таким образом, при коэффициенте усиления K0=106 отношение  можно без потери чувствительности ЛПУ снизить до 5· 10-3, то есть плоский угол приема может быть в 14 раз меньше плоского дифракционного угла. Отсюда следует важный практический вывод, заключающийся в том, что размеры одного элемента фотоприемной матрицы могут быть существенно меньше размера дифракционного пятна принимаемого сигнала в фокусе линзы, с помощью которой сигнал фокусируется на фотоприемную матрицу. При этом чувствительность ЛПУ остается на том же уровне, что и при приеме в дифракционном угле.
можно без потери чувствительности ЛПУ снизить до 5· 10-3, то есть плоский угол приема может быть в 14 раз меньше плоского дифракционного угла. Отсюда следует важный практический вывод, заключающийся в том, что размеры одного элемента фотоприемной матрицы могут быть существенно меньше размера дифракционного пятна принимаемого сигнала в фокусе линзы, с помощью которой сигнал фокусируется на фотоприемную матрицу. При этом чувствительность ЛПУ остается на том же уровне, что и при приеме в дифракционном угле.
Локационное устройство, реализующее предлагаемый способ, выполнено на базе стандартных блоков и узлов.
В качестве источника лазерного излучения 1 может быть использован, например, фотодиссоционный лазер с активным веществом в газовой фазе на основе перфторалкилиодидов и накачкой с помощью мощных импульсных источников оптического излучения. Активные квантовые фильтры 7,21 представляют собой малошумящие квантовые усилители, которые также могут быть реализованы на основе фотодиссоционного лазера с указанным активным веществом и накачкой импульсными оптическими источниками излучения.
В качестве блока обработки информации 30 использована стандартная ПЭВМ со спецпроцессором и блоками сопряжения для приема и передачи импульсных управляющих сигналов. Программное обеспечение блока 30 (ПЭВМ) включает последовательность операций по включению и запуску отдельных блоков локационного устройства, АКФ 7,21, управления блоком 4 привода и управления поворотным зеркалом 3, установления заданной величины длительности стробирующих импульсов в БФС 10. В состав блока обработки информации 30 входят блоки памяти и отображающий дисплей, на котором наблюдают сформированные в БФО 28, 29 распределения, соответствующие отдельным сечениям исследуемого объекта. Оптические затворы 18, 19 могут быть выполнены на основе, например, электрооптического модулятора света, представляющего собой пластину из электрооптического кристалла с нанесенными электродами, подключенными к блоку управления 20. Возможно применение в качестве оптического затвора акустооптических модуляторов света, а также быстродействующего пространственного модулятора света на основе электронно-лучевой трубки с электрооптическим кристаллом [8]. Оптическая линия задержки 17 (фиг.3) представляет собой оптический ретранслятор потока излучения с двумя или более согласующими линзами 40, 41. Необходимая временная задержка осуществляется выбором соответствующей длины Lo оптической линии задержки.
Многоэлементный фотоприемник 9 содержит матрицу фотодиодов, чувствительных к излучению на рабочей длине волны АКФ 7,21. Телевизионные фотоприемники ТФП 23-27 представляют собой стандартные телевизионные передающие трубки, обладающие чувствительностью к излучению на λ раб АКФ 7,21. Возможно использование в качестве ТФП любых фотоприемных устройств на указанную λ раб, обладающих большим количеством элементов разложения, соответствующих современным телевизионным стандартам и формирующих на выходе цифровой или аналоговый телевизионный сигнал.
Блок функциональной обработки 28, 29 содержит регистры памяти 42, 43, выполненные на основе стандартных запоминающих ячеек, процессоры БПФ 44, 45, 47, представляющие собой специализированные цифровые процессоры с программой, ориентированной на выполнение операций Фурье-преобразования и перемножения цифровых массивов информации. Аналогичным спецпроцессором является и цифровой перемножитель 46. Блок формирования стробов 10 выполнен на основе стандартных импульсных электронных элементов и содержит электронные усилители 32, пороговые элементы на основе, например, управляемых мультивибраторов, стандартные регистры памяти 48 и электронный сумматор 34. Ячейки формирования импульсов 35, 36, 37 могут быть выполнены, например, на основе управляемых мультивибраторов, в которых длительность формируемого импульса, а также его задержка по времени управляются по сигналам, поступающим от блока обработки информации 30. При этом момент времени начала формирования стробирующего импульсного сигнала определяется передним фронтом суммарного сигнала, поступающего с выхода сумматора 34.
Для преобразования управляющих сигналов в аналоговую или цифровую форму при сопряжении исполнительных блоков с блоком обработки информации 30 (ПЭВМ), или между собой предусмотрены стандартные аналого-цифровые (или ЦАП) преобразователи, входящие в соответствующие блоки, или элементы.
В составе регистра памяти 42 предусмотрена ячейка переключения входа для подачи на вход регистра 42 по отдельности сигнала от ТФП 25, 27, или с выхода регистра памяти 48 в БФС 10. В локационном устройстве, реализующем способ лазерной локации, предусмотрена возможность увеличения количества выделяемых и формируемых изображений сечений наблюдаемого объекта. Для этого может быть увеличено количество блоков динамической фильтрации 12, 13, каждый из которых динамически отфильтровывает сечение наблюдаемого объекта и формирует поток излучения с соответствующим возрастающим порядковым номером n. Вторым вариантом реализации этой возможности увеличения количества сечений объекта является установление циклической работы блоков динамической фильтрации 11-13. При этом после фильтрации в БДФ 13 потока излучения с порядковым номером n=3 блок динамической фильтрации 11 осуществляет фильтрацию и выделение следующего потока излучения с порядковым номером n=4, и так далее. БДФ 12, 13 формируют отфильтрованные потоки излучения с n=5, n=6. Для этого в БДФ 10 по командам от блока обработки информации 30 формируют стробирующие импульсные сигналы, поступающие в соответствующие моменты времени в БДФ 11-13. Непрерывно поступающие сигналы с выходов ТФП 23-27 сначала поступают для буферного запоминания в регистры памяти 42, 43 БФО 28, 29, а затем после формирования взаимно корреляционных функций - в блок обработки информации 30 для запоминания и отображения на дисплее. В результате увеличения количества формируемых изображений сечений наблюдаемого объекта увеличивается точность определения его формы и размеров, повышается детальность и объем получаемой информации.
Проведенные исследования экспериментального образца устройства, реализующего способ, подтвердили увеличение точности при определении геометрических размеров и формы наблюдаемого объекта при одновременном обеспечении предельно высокой квантовой чувствительности приема локационных сигналов, ограниченной квантовым пределом.
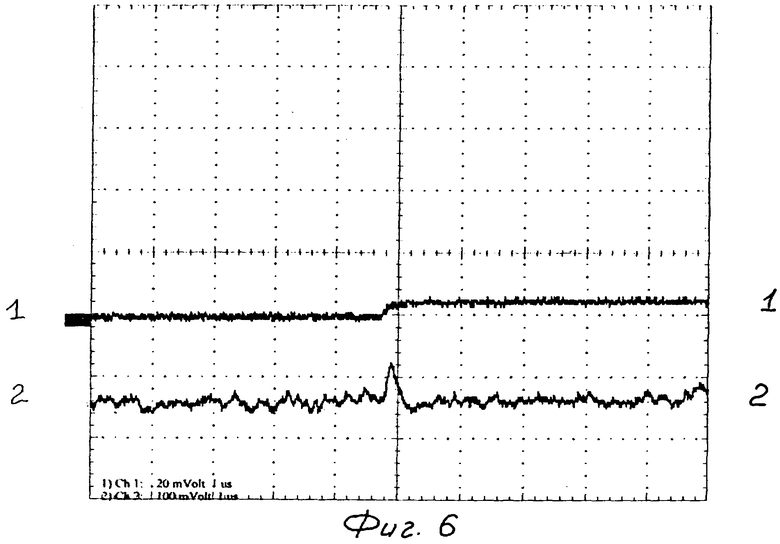
На фиг.6 поз.1 и 2 приведены две осциллограммы оптических импульсных сигналов, зарегистрированных, соответственно, на выходе источника лазерного излучения (поз.1 на фиг.1) и на выходе АКФ 7 в одном из элементов МФП 9. Первая осциллограмма соответствует импульсу лазерного излучения, подсвечивающего наблюдаемый объект, а вторая осциллограмма соответствует импульсу излучения, отраженному от объекта, усиленного в АКФ 7 и зарегистрированного в МПФ 9 и превысившего заданный пороговый уровень в одном из пороговых элементов 33 БФС 10. Осциллограмма на фиг.6 поз.1 соответствует сигналу, зарегистрированному на выходе измерительной интегрирующей схемы, подключенной к выходу калиброванного измерительного фотодиода, измеряющего энергию импульса лазерного излучения, подсвечивающего объект. Величина перепада напряжения на осциллограмме поз.1 в момент времени приема и регистрации лазерного импульсного сигнала от объекта, показанного на второй осциллограмме поз.2, соответствует с высокой точностью энергии лазерного импульса, сформированного источником лазерного излучения 1 на фиг.1.
На входе АКФ 7 импульс лазерного излучения от наблюдаемого объекта был значительно ослаблен и составлял по уровню энергии в числах фотонов величину Nвх=18 фотонов при соотношении сигнал/шум q=3. Данное соотношение сигнал/шум определялось относительно уровня шумов, соответствующих величине среднеквадратичного отклонения σ , определяемого как 1/3 от максимального выброса шумов (3σ ) по осциллограмме на фиг.6 поз.2. Прием осуществлялся в телесном угле, равном одному дифракционному углу для величины действующей входной апертуры активного квантового фильтра 7. Ширина полосы усиления электронного усилителя составляла f=8 МГц. Уровень минимально-обнаружимого сигнала для отношения сигнал/шум q=1 составляет, согласно полученным экспериментальным данным,  фотонов. Чувствительность равна 8· 10-12 Вт. Теоретическая оценка по известным формулам [5] для указанных параметров входного сигнала и условий приема составляет Nmin=6,2 квантов (фотонов). Удовлетворительное совпадение экспериментальных результатов с теоретической оценкой подтверждает возможность достижения в устройстве, реализующем способ, предельно высокой чувствительности, ограниченной квантовой структурой принимаемого электромагнитного сигнала.
фотонов. Чувствительность равна 8· 10-12 Вт. Теоретическая оценка по известным формулам [5] для указанных параметров входного сигнала и условий приема составляет Nmin=6,2 квантов (фотонов). Удовлетворительное совпадение экспериментальных результатов с теоретической оценкой подтверждает возможность достижения в устройстве, реализующем способ, предельно высокой чувствительности, ограниченной квантовой структурой принимаемого электромагнитного сигнала.
На фиг.6 поз. 2 хорошо видны квантовые шумы активного квантового фильтра 7, характерные для условий приема оптических сигналов в режиме предельной квантовой чувствительности.
На фиг.7 представлено изображение модели объекта, зарегистрированное телевизионным фотоприемником в устройстве, реализующем способ, в режиме приема, близком к предельной квантовой чувствительности.
Применение предлагаемого способа лазерной локации и локационного устройства для его осуществления позволяет получить следующие результаты:
- обеспечить повышение точности определения геометрических размеров и формы наблюдаемых объектов;
- реализовать увеличение разрешающей способности при формировании изображений объекта при одновременном обеспечении предельно высокой чувствительности, ограниченной квантовым пределом;
- повысить точность определения координат наблюдаемого объекта;
- увеличить дальность действия лазерной локационной системы наблюдения за удаленными малоразмерными космическими объектами.
Источники информации.
1. С.К.Манкевич, И.Н.Матвеев. “О чувствительности топографической телевизионной системы”. “Техника средств связи”, серия “Техника телевидения”, вып.3 (17), М., 1979 г. Стр. 36-44.
2. Авт. свид. СССР №944437, опубл. 20.04.1995 г. Бюл. №11.
3. Авт. свид. СССР №743401, опубл. 20.05.1995 г. Бюл. №14.
4. Патент РФ №2152056, опубл. 27.06.2000 г. Бюл. №18 (прототип).
5. “Квантовая электроника” 2000 г. Т. 30. №9, стр. 833-838.
6. “Квантовая электроника” 2002, Т.32, №4, стр. 349-356.
7. Гауэр Дж. “Оптические системы связи” М.: “Радио и связь”, 1989 г.
8. Авт. свид. СССР №669976 от 21.03.1977 г. “Электронно-лучевая светомодулирующая трубка” авт. Манкевич С.К. и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И ПРИЕМА СИГНАЛОВ ЛАЗЕРНОЙ КОСМИЧЕСКОЙ СВЯЗИ И ЛАЗЕРНОЕ ПРИЕМНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337379C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЛАЗЕРНОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2248555C1 |
| СПОСОБ ЛАЗЕРНОЙ КОСМИЧЕСКОЙ СВЯЗИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2380834C1 |
| СПОСОБ СПЕКТРАЛЬНОЙ ФИЛЬТРАЦИИ ОПТИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ - АКТИВНЫЙ КВАНТОВЫЙ ФИЛЬТР | 1997 |
|
RU2133533C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |

Изобретение относится к области лазерной локации и квантовой электроники. Достигаемый технический результат заключается в повышении дальности действия лазерной локационной системы наблюдения за удаленными малоразмерными космическими объектами, увеличении разрешающей способности при формировании изображений наблюдаемого космического объекта и одновременной реализации предельно высокой квантовой чувствительности, ограниченной квантовым пределом, а также повышение точности определения координат наблюдаемого объекта. Согласно предлагаемому способу осуществляют прием и усиление отраженного от объекта излучения посредством высокочувствительного квантового усилителя - активного квантового фильтра (АКФ), разделяют излучение на парциальные световые потоки, задерживают их по времени и осуществляют динамическую временную фильтрацию каждого из парциальных световых потоков посредством специального сформированного стробирующего сигнала, формируют взаимно корреляционные функции между первым и последующими парциальными световыми потоками. 2 с. и 7 з.п. ф-лы, 7 ил.

 где с - скорость света, L0 - пространственная разрешающая способность по линейной координате дальности.
где с - скорость света, L0 - пространственная разрешающая способность по линейной координате дальности.
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| US 5216236 A, 01.06.1993 | |||
| US 5973309 A, 26.10.1999 | |||
| СПОСОБ ПОЛУЧЕНИЯ ГЕЛИЯ | 2015 |
|
RU2689252C2 |
| DE 3623808 A1, 28.01.1988 | |||
| ЧЕМОДАНОВ Б.К | |||
| Астроследящие системы, Москва, Машиностроение, 1977, стр.5-26. | |||

