Изобретение относится к измерительной технике и может быть использовано для бесконтактных измерений профиля деталей типа тел вращения, а также слабой волнистости поверхности в виде пространственной функции.
Известно устройство для измерения профиля тел вращения и волнистости, содержащее измерительный элемент, контактирующий с поверхностью, и датчики фактического радиуса, электронный блок для управления скоростью вращения измеряемой детали, а также регулирующее устройство [1].
Недостатком данного устройства является контактный способ измерения и низкий динамический диапазон устройства, не позволяющий фиксировать волнистость малой амплитуды, присущую деталям точного машиностроения, например таким, как изделия подшипниковой промышленности.
Известно оптико-электронное устройство для контроля геометрической формы трехмерных объектов, в котором на тестируемую поверхность направляют ножевидный пучок света, телевизионной камерой принимают след пересечения пучка с поверхностью и по виду этой кривой с учетом угла падения пучка обработкой данных в компьютере восстанавливают форму поверхности /патент 5104227, США, Apparatus for measuring three-dimensional curved surfase. shapes /Uesugi Mitsuaki, Jnomata Masaichi; NKK Corp. -N 496217.-Опубл. 14.04.92., N 1-84875, /Япония/; кл. 356/376/.
Однако данный способ применим лишь для диффузно рассеивающих поверхностей, но не применим для отражающих.
Известен способ измерения линейных размеров объектов с отражающей поверхностью, при котором световой луч направляют под углом к отражающей поверхности вращения, положение отраженного луча регистрируют на фотоприемной плоскости, которая расположена параллельно падающему лучу и, используя координаты лучей, отраженных от образцовой детали и измеряемой при помощи приведенных соотношений, находят диаметр измеряемой детали (авт. св. СССР, 1320658, 1987. Бюл. 24).
Недостатками этого способа являются, во-первых, одномерный характер измерений, не позволяющий восстанавливать форму поверхностей, отличных от цилиндрических, во-вторых, невозможность отличить изменение радиуса в точке падения зондирующего луча от локальных наклонов поверхности, вызванных ее волнистостью, в-третьих, существенная нелинейность градуировочной характеристики, значительно ограничивающая точность измерения, вызванная отображением трехмерной поверхности на плоскость.
Наиболее близким техническим решением является способ бесконтактного контроля поверхности движущихся объектов, заключающийся в том, что направляют световой луч на объект так, чтобы луч отражался от него, и детектируют указанный отраженный луч в процессе относительного движения луча и объекта [2]. При этом согласно п. 4 формулы указанного изобретения указанным объектом является колесо железнодорожного вагона. Очевидно, что оно является телом вращения.
Недостатком этого способа является отсутствие методики обработки измерительной информации, а также отсутствие конкретного количественного критерия качества контролируемых объектов.
Целью изобретения является расширение функциональных возможностей для измерения формы сложных трехмерных поверхностей вращения (например, дорожек качения колец шарикоподшипников) и повышение точности для воспроизведения некруглости и волнистости малых амплитуд.
Указанная цель достигается тем, что в способе измерения геометрической формы тел вращения с отражающей поверхностью, заключающемся в том, что направляют световой луч на тестируемую поверхность контролируемого тела вращения, сканируют поверхность ее поворотом и перемещением светового луча, для каждого положения тестируемой поверхности и светового луча фиксируют отраженный световой луч фотоприемником и по его пространственным координатам измеряют геометрическую форму, световой луч направляют на тестируемую поверхность контролируемого тела вращения перпендикулярно оси вращения со смещением относительно этой оси, при этом при сканировании поверхности световой луч перемещают параллельно оси вращения в дискретные точки, фотоприемник используют с формой фотоприемной поверхности в виде боковой поверхности цилиндра, концентричного контролируемому телу вращения, а при измерении геометрической формы тела вращения регистрируют в дискретной точке сканирования полярный угол и высоту положения луча на фотоприемнике, затем формируют массивы регистрируемой информации, по которым для каждого кругового сечения контролируемого тела вращения последовательно определяют радиус усредненного профиля, производную усредненного профиля и производные функции волнистости, восстанавливают отсчеты функции волнистости по соответствующим производным с учетом кривизны усредненного профиля.
При этом линеаризация градуировочных характеристик достигается тем, что положение отраженного луча регистрируется в естественной для тела вращения цилиндрической системе координат.
На фиг. 1 и 2 изображена схема, поясняющая способ измерения геометрической формы тел вращения с отражающей поверхностью.
Схема содержит осветитель 1, например лазер с соответствующей оптической схемой, для осуществления точечной засветки, тело вращения 2, фотоприемную поверхность 3, расположенные в декартовой системе координат.
Зондирующий луч  перпендикулярен плоскости YOZ и направлен на тестируемую поверхность с фиксированным осевым смешением в положительном направлении оси OY величиной Y0.
перпендикулярен плоскости YOZ и направлен на тестируемую поверхность с фиксированным осевым смешением в положительном направлении оси OY величиной Y0.
Отраженный телом вращения луч  принимается фотоприемной поверхностью 3, представляющей собой участок боковой поверхности цилиндра с радиусом L, концентричного тестируемой поверхности. Подобная фотоприемная поверхность может быть реализована, например, перемещением линейного позиционно-чувствительного фотоприемника, ориентированного параллельно оси OZ, по дуге соответствующего радиуса.
принимается фотоприемной поверхностью 3, представляющей собой участок боковой поверхности цилиндра с радиусом L, концентричного тестируемой поверхности. Подобная фотоприемная поверхность может быть реализована, например, перемещением линейного позиционно-чувствительного фотоприемника, ориентированного параллельно оси OZ, по дуге соответствующего радиуса.
Сканирование тестируемой поверхности осуществляется дискретным перемещением осветителя в направлении оси OZ и шаговым разворотом тела вращения.
В процессе измерения для каждого положения осветителя Zk и углового положения тела вращения ϕi фиксируют координаты отраженного луча на фотоприемной секции, такие, как полярный угол Ψik и высота по оси OZ ξik . В результате сканирования тестируемой поверхности накапливают массивы измерительной информации {Ψik,ξik-Zik} , где индекс i =  соответствует развороту тела вращения, индекс K =
соответствует развороту тела вращения, индекс K =  соответствует положению осветителя Zk.
соответствует положению осветителя Zk.
Основные расчетные соотношения получены из системы уравнений, включающей условие зеркального отражения лучей ,
,
и уравнение тестируемой поверхности в виде
ρ(ϕ,z) = R(z)+H(ϕ,z), (2) ,
где - вектор нормали к поверхности в точке отражения;
- вектор нормали к поверхности в точке отражения;
ρ,ϕ,z -цилиндрические координаты;
R(Z) - усредненный профиль, представляющий собой математическое ожидание случайной функции;
H(ϕ,z) - функция волнистости, представляющая собой случайный процесс с нулевым средним.
На функцию волнистости наложено ограничение
Η(ϕ,z) ≪ R(z) (3)
Решая систему уравнений с учетом ограничения /3/, получаем значения производных функции волнистости H (ϕ,z) в дискретных точках, соответствующих положению сканирующего луча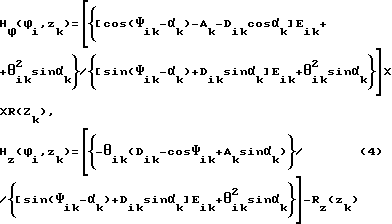
В данных выражениях приняты следующие обозначения: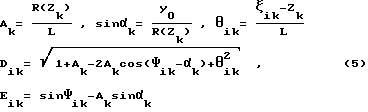 ,
,
В выражениях 4/ входят неизвестные значения радиуса R/Zk/ и производной Rz/Zk/ усредненного профиля для конкретного кругового сечения тестируемой поверхности.
Рассматривая R/Z/ как математическое ожидание случайной функции /2/ и используя свойство линейности выражений /4/ при малом изменении параметров, получаем условия Hϕ=0 и Hz = 0 для нахождения искомых параметров усредненного профиля.
Величина R/Zk/ может быть найдена в результате решения уравнения ,
,
а величина производной усредненного профиля Rz/Zk/ определяется из выражения ,
,
где
Ak,αk - определены выражениями /5/; - средние значения параметров Ψik и θik за оборот тестируемой поверхности для кругового сечения Zk;
- средние значения параметров Ψik и θik за оборот тестируемой поверхности для кругового сечения Zk;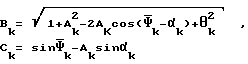 ,
,
Необходимо отметить, что уравнение /6/ имеет явное, но громоздкое решение и поэтому здесь не приводится.
Восстановление геометрической формы тестируемой поверхности вращения производится на основе приведенных выше расчетных соотношений и выполняется в несколько последовательных этапов.
На первом этапе, решая уравнение /6/, находят радиусы R/Zk/ усредненного профиля и, подставляя их значения в выражение /7/, определяют соответствующие производные Rz/Zk/.
На втором этапе, используя вычисленные параметры R/Zk/ и Rz/Zk/, при помощи выражений /4/ вычисляют значение производных функции волнистости Hϕ(ϕi,zk) и Hz (ϕi,zk) в точках сканирования.
На третьем этапе восстанавливают функцию волнистости H (ϕ,z) при помощи любых известных методов численного интегрирования с учетом криволинейных координат, определяемых формой усредненного профиля R/Z/.
При детальном рассмотрении полученных расчетных соотношений можно заменить, что они зависят от относительного параметра настройки оптической схемы, определяемого выражением p=Y0/L/
На фиг. 3 представлена градуировочная характеристика усредненного профиля R/Z/ для цилиндрических поверхностей при p=0,2. На основании приведенной зависимости видно, что в диапазоне углов  от 45 до 130o способ позволяет охватить измерением тела вращения, отличающиеся по радиусу примерно в два раза. Это могут быть как различные цилиндры, так и конусы, поверхности с произвольными криволинейными профилями.
от 45 до 130o способ позволяет охватить измерением тела вращения, отличающиеся по радиусу примерно в два раза. Это могут быть как различные цилиндры, так и конусы, поверхности с произвольными криволинейными профилями.
Оптическая схема при p=0,2, Y0=7 мм, L = 35 мм применима для тел вращения с диапазоном радиусов 8 мм <R/Z/< 16 мм. Средняя крутизна относительного измерения радиусов составляет ≈0,6% на градус угла  . При выборе шага
. При выборе шага  и использовании линейного координатно-чувствительного фотоприемника типа К 1200 ЦЛ1 с шагом элементов фотосекции 15 мкм оптическая схема с чувствительна к волнистости с локальными наклонами порядка 0,002 мм/мм.
и использовании линейного координатно-чувствительного фотоприемника типа К 1200 ЦЛ1 с шагом элементов фотосекции 15 мкм оптическая схема с чувствительна к волнистости с локальными наклонами порядка 0,002 мм/мм.
Способ дает новые возможности для создания оптических датчиков адаптивного действия, позволяющих настраиваться на реальную форму поверхности и воспроизводить топограмму ее микронеровностей, используя усредненный профиль как внутреннюю систему координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ВОЛНОВОГО ФРОНТА | 1990 |
|
RU2046382C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОБЪЕМНЫХ ИЗДЕЛИЙ ИЗ ПОРОШКОВОЙ КОМПОЗИЦИИ | 1995 |
|
RU2145269C1 |
| Способ тепловизионного контроля внутренних дефектов | 1989 |
|
SU1712852A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ НА ОСНОВЕ ПОЛУПРОВОДНИКОВОГО ИНЖЕКЦИОННОГО ЛАЗЕРА С ВНЕШНЕЙ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 1995 |
|
RU2102705C1 |
| Способ измерения геометрических размеров прозрачных труб | 1984 |
|
SU1223038A1 |
| Устройство для контроля линейных размеров объекта | 1983 |
|
SU1113668A1 |
| Устройство для фокусировки излучения в кольцо | 1990 |
|
SU1730606A1 |
| Способ контроля периодических изображений | 1987 |
|
SU1511753A1 |
| Устройство для контроля качества обработки поверхности изделия | 1991 |
|
SU1778522A1 |
| Устройство для контроля шероховатости поверхности | 1990 |
|
SU1711001A1 |
Использование: бесконтактное измерение профиля деталей типа тел вращения, а также слабой волнистости поверхности в виде пространственной функции. Сущность изобретения: на тестируемую поверхность тела вращения направляют световой луч перпендикулярно оси вращения со смещением относительно этой оси, перемещают его параллельно оси вращения в дискретные точки, регистрируют полярный угол и высоту положения луча на фотоприемнике, фотоприемник используют с формой фотоприемной поверхности в виде боковой поверхности цилиндра. 3 ил.
Способ измерения геометрической формы тел вращения с отражающей поверхностью, заключающийся в том, что направляют световой луч на тестируемую поверхность контролируемого тела вращения, сканируют поверхность ее поворотом и перемещением светового луча, для каждого положения тестируемой поверхности и светового луча фиксируют отраженный световой луч фотоприемником и по его пространственным координатам измеряют геометрическую форму, отличающийся тем, что световой луч направляют на тестируемую поверхность контролируемого тела вращения перпендикулярно оси вращения со смещением относительно этой оси, при этом при сканировании поверхности световой луч перемещают параллельно оси вращения в дискретные точки, фотоприемник используют с формой фотоприемной поверхности в виде боковой поверхности цилиндра, концентричного контролируемому телу вращения, а при измерении геометрической формы тела вращения регистрируют в дискретной точке сканирования полярный угол и высоту положения луча на фотоприемнике, затем формируют массивы регистрируемой информации, по которым для каждого кругового сечения контролируемого тела вращения последовательно определяют радиус усредненного профиля, производную усредненного профиля и производные функции волнистости, восстанавливают отсчеты функции волнистости по соответствующим производным с учетом кривизны усредненного профиля.
| SU, авторское свидетельство, 1272112, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, заявка, 2178169, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
