Изобретение относится к измерительной технике и может быть использовано для контроля линейных размеров, а также в системах автоматического контроля, управления и регулирования параметров промышленных технологических процессов, например, при определении хозяйственно-питьевой и технологической воды в резервуарах систем водоснабжения.
Известен способ контроля расстояния до объекта, заключающийся в том, что формируют информационный импульс длительностью, пропорциональной времени зондирования базового расстояния, используют данный импульс для автоматической регулировки частоты следования счетных импульсов, излучают акустический импульс в направлении поверхности контролируемого объекта, формируют последовательность информационных сигналов и определяют значение уровня по разности счетных импульсов, вырабатываемых в течение двух интервалов времени между информационными сигналами /1/.
Устройство для реализации известного способа содержит ультразвуковой преобразователь, блок формирования счетных импульсов и блок формирования выходного сигнала с включением в состав последнего реверсивного счетчика.
Однако известный способ характеризуется недостаточной точностью измерения.
Известен способ контроля расстояния до объекта, предварительными операциями которого являются размещение первой плоскости излучения и плоскости регистрации на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, и совмещение второй плоскости излучения с плоскостью регистрации, и который заключается в формировании первого зондирующего импульса в первой плоскости излучения, в переотражении первого зондирующего импульса плоскостью регистрации в направлении поверхности контролируемого объекта, в периодическом формировании зондирующих импульсов во второй плоскости излучения, в формировании первого информационного сигнала длительностью, равной интервалу времени, необходимому для прохождения первым зондирующим импульсом базового расстояния, в формировании второго информационного сигнала длительностью, равной интервалу времени, необходимому для проведения заданного количества регистраций зондирующих импульсов, в заполнении второго информационного сигнала счетными импульсами, для корректировки частоты следования которых используют первый информационный сигнал, и в считывании результатов контроля /2/.
Известно устройство для реализации способа контроля расстояния до объекта, содержащее первый и второй ультразвуковые преобразователи, размещенные на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, семь электронных ключей, к выходу первого из которых подключен первый ультразвуковой преобразователь, а к выходу второго - вход шестого электронного ключа и второй ультразвуковой преобразователь, генератор акустических импульсов, генератор акустических импульсов, к выходу которого подключен вход первого, вход и запирающий вход второго электронных ключей, а вход подключен к выходу третьего электронного ключа, к выходу и отпирающему входу пятого электронного ключа, усилитель-формирователь, вход которого подключен к выходу шестого электронного ключа, а к выходу подключены вход четвертого и вход пятого электронных ключей, триггер, первый установочный, вход которого подключен к выходу первого электронного ключа, идущий мультивибратор, управляющий вход которого подключен к выходу триггера, первый установочный вход, объединенный со вторым установочным входом последнего, а также со входом и отпирающим входом седьмого электронного ключа, подключен к выходу пятого электронного ключа, а второй установочный вход объединен к запирающими входами третьего, четвертого, пятого и седьмого электронных ключей и с отпирающими входами первого и второго электронных ключей, первый счетчик, вход которого подключен к выходу ждущего мультивибратора, а вход сброса показаний - к выходу первого электронного ключа, и второй счетчик, вход которого, объединенный со входом третьего электронного ключа и с запирающим входом шестого электронного ключа, подключен к выходу седьмого электронного ключа, а к выходу подключен второй установочный вход ждущего мультивибратора.
Согласно известному способу значение расстояния до объекта определяют по отношению количества счетных импульсов и заданного количества регистраций зондирующих импульсов. Т.е. для определения указанного значения производят неоднократное переизлучение зондирующих импульсов, в то время, как коррекцию частоты следования счетных импульсов выполняют с использованием информации, полученной при зондировании базового расстояния лишь зондирующим импульсом. При непостоянстве температуры среды между второй плоскостью излучения и контролируемым объектом скорости распространения второго и последующих зондирующих импульсов будут отличаться друг от друга и от скорости распространения первого зондирующего импульса, что при постоянной частоте следования счетных импульсов приводит к снижению точности контроля.
Задача изобретения - повышение точности контроля.
Решение поставленной задачи заключается в том, что в способе контроля расстояния до объекта, предварительной операцией которого является размещение плоскости излучения и плоскости регистрации на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, и который заключается в формировании зондирующего импульса в плоскости излучения, в переотражении зондирующего импульса плоскостью регистрации в направлении поверхности контролируемого объекта, в формировании первого информационного сигнала длительностью, равной интервалу времени, необходимому для прохождения зондирующим импульсом базового расстояния, в формировании второго информационного сигнала, и в считывании результатов контроля, второй информационный сигнал формируют в интервале времени между моментами первой и второй регистраций зондирующего импульса, в момент первой регистрации зондирующего импульса приступают к формированию первой последовательности стандартных импульсов, регистрируют стандартные импульсы первой последовательности, сформированные за время формирования второго информационного сигнала, и по их количеству производят предварительное определение значения расстояния до контролируемого объекта, в момент второй регистрации зондирующего импульса приступают к формированию второй последовательности стандартных импульсов с периодом следования, равным периоду следования стандартных импульсов первой последовательности, формируют третий информационный сигнал длительностью, равной интервалу времени между моментом формирования первого стандартного импульса второй последовательности и предшествующим ему по времени формирования стандартным импульсом первой последовательности, в момент формирования первого стандартного импульса второй последовательности приступают к формированию третьей последовательности стандартных импульсов с периодом следования, равным суммарному значению периода следования стандартных импульсов второй последовательности и длительности третьего информационного сигнала, регистрируют стандартные импульсы второй последовательности, сформированные за время формирования десяти периодов третьей последовательности стандартных импульсов, и по их количеству судят о величине поправки к предварительно определенному значению расстояния до контролируемого объекта, при этом, первый информационный сигнал используют для корректировки периодов первой, второй и третьей последовательностей стандартных импульсов.
При этом, относительно устройства для реализации способа контроля расстояния до объекта, содержащего первый и второй ультразвуковые преобразователи, размещенные на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, пять электронных ключей, генератор акустических импульсов, усилитель-формирователь, первый триггер, первый ждущий мультивибратор, управляющий вход которого подключен к выходу первого триггера, а первый установочный вход объединен со вторым установочным входом первого триггера, первый и второй счетчики, поставленная задача решается тем, что в его состав включены второй триггер, второй и третий ждущие мультивибраторы и третий счетчик, вход которого подключен к выходу третьего ждущего мультивибратора, первый ультразвуковой преобразователь подключен к первому выходу генератора акустических импульсов, ко второму ультразвуковому преобразователю подключен вход усилителя-формирователя, первый установочный вход первого триггера подключен ко второму выходу генератора акустических импульсов, а второй установочный вход, объединенный с запирающим входом первого электронного ключа и с отпирающими входами второго и третьего электронных ключей, подключен к выходу первого электронного ключа, первый установочный вход второго триггера, объединенный с запирающим входом четвертого электронного ключа и со вторым установочным входом первого ждущего мультивибратора, подключен к выходу четвертого электронного ключа, а второй установочный вход, объединенный с первым установочным входом третьего ждущего мультивибратора, со входом и с запирающим входом пятого электронного ключа, подключен к выходу второго ждущего мультивибратора, первый установочный вход второго ждущего мультивибратора, объединенный с запирающими входами второго и третьего электронных ключей и с отпирающими входами первого и четвертого электронных ключей, подключен к выходу второго электронного ключа, объединенный вход первого и второго электронных ключей подключен к выходу усилителя-формирователя, объединенный вход третьего и четвертого электронных ключей подключен к выходу первого ждущего мультивибратора, вход первого счетчика подключен к выходу третьего электронного ключа, вход второго счетчика подключен к выходу пятого электронного ключа, первый управляющий вход третьего ждущего мультивибратора и управляющий вход второго ждущего мультивибратора подключены к выходу первого триггера, а второй управляющий вход третьего ждущего мультивибратора подключен к выходу второго триггера.
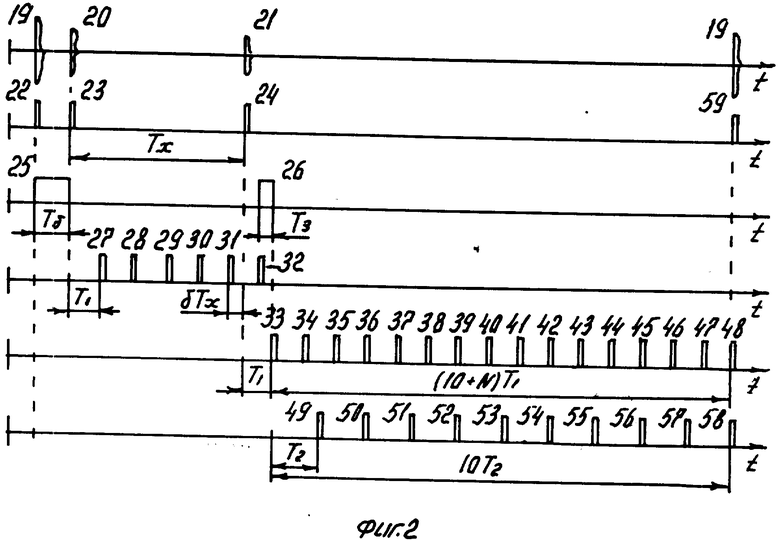
На фиг. 1 представлена схема устройства для реализации способа контроля расстояния до объекта: на фиг. 2 - временные диаграммы.
Устройство содержит первый и второй ультразвуковые преобразователи 1 и 2, размещенные вдоль линии, параллельной поверхности контролируемого объекта 3 на базовом расстоянии Lδ друг от друга, генератор 4 акустических импульсов, усилитель-формирователь 5, пять электронных ключей 6-10, первый и второй триггеры 11 и 12, первый, второй и третий ждущие мультивибраторы 13, 14 и 15, первый, второй и третий счетчики 16, 17 и 18 (фиг. 1).
Способ заключается в следующем.
Предварительной операцией предлагаемого способа является размещение плоскости излучения зондирующего импульса 19 (фиг. 2) и плоскости его регистрации на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта 4. Базовое расстояние Lδ задается первым и вторым ультразвуковыми преобразователями 1 и 2 (фиг. 1).
Процесс контроля расстояния Lx до объекта 3 начинается в момент возбуждения первого ультразвукового преобразователя 1 электрическим импульсом 22 с первого выхода генератора 4 акустических импульсов. Одновременно импульс 22 со второго выхода генератора 4 поступает на первый установочный вход первого триггера 11. Триггер 11 запускается и на объединенный управляющий вход первого, второго и третьего ждущих мультивибраторов 13, 14 и 15 начнет поступать первый информационный сигнал 25. Длительность Tδ формируемого триггером 11 сигнала 25 выбирают равной интервалу времени, необходимому для прохождения зондирующим импульсом 19 базового расстояния Lδ и используют для приведения (корректировки) периодов T1 и T2 следования стандартных импульсов 27-48 и 49-58 со значением скорости распространения зондирующего импульса 19.
Спустя время Tδ после излучения зондирующий импульс 19 в виде акустического сигнала 20 достигает плоскость регистрации (рабочую поверхность ультразвукового преобразователя 2) и переотражается ею в направлении поверхности контролируемого объекта 3. При этом преобразователем 2 производится первая регистрация зондирующего импульса. Соответствующий акустическому импульсу 20 и определяющий передний фронт второго информационного сигнала электрический импульс 23 с выхода усилителя-формирователя 5 через открытый в исходном состоянии первый электронный ключ 6 поступает на второй установочный вход первого триггера 11 и останавливает его работу. Формирование первого информационного сигнала 25 прекращается. Кроме того, импульс 23 запирает за собой ключ 6, отпирает второй и третий электронные ключи 7 и 8, и поступает на первый установочный вход первого ждущего мультивибратора 13, первая последовательность стандартных импульсов 27-32 которого через электронный ключ 8 начинает поступать на вход первого счетчика 16.
Спустя время Tx, необходимое для прохождения зондирующим импульсом 19 расстояния Lx от ультразвукового преобразователя 2 до поверхности объекта 3 и повторного прохождения расстояния Lx в обратном направлении, преобразователь 2 производит вторую регистрацию зондирующего импульса 19, достигшего рабочую поверхность преобразователя 2 в виде акустического сигнала 21. Соответствующий сигналу 21 и определяющий задний фронт второго информационного сигнала электрический импульс 24 с выхода усилителя-формирователя 5 проходит открытый импульсом 23 второй электронный ключ 7, запирает его за собой, возвращает в исходное состояние первый ключ 6 и запускает второй ждущий мультивибратор 14. Мультивибратор 14 начинает вырабатывать вторую последовательность стандартных импульсов 33-48 с периодом T1 следования, равным периоду T1 следования стандартных импульсов 27-32 первой последовательности.
Одновременно электрический импульс 24 запирает третий электронный ключ 8 и отпирает четвертый ключ 9, в результате чего стандартный импульс 32 первой последовательности через электронный ключ 9 остановит работу первого ждущего мультивибратора 13, закроет за собой ключ 9 и запустит второй триггер 12. Триггер 12 предназначен для формирования третьего информационного сигнала 26 длительностью T3, равной интервалу времени между моментом формирования первого стандартного импульса 33 второй последовательности и предшествующим ему по времени формирования стандартных импульсов 32 первой последовательности. Поэтому второй установочный вход второго триггера 12 подключен к выходу второго ждущего мультивибратора 14. Стандартный импульс 33 останавливает работу триггера 12 и отпирает пятый электронный ключ 10, через который на вход второго счетчика 17 начинают поступать стандартные импульсы 34-48 второй последовательности.
В момент формирования заднего фронта третьего информационного сигнала 26 запускается третий ждущий мультивибратор 15, первый установочный вход которого объединен со вторым установочным входом второго триггера 12. С выхода ждущего мультивибратора 15 на вход третьего счетчика 18 начинают поступать стандартные импульсы 49-58 третьей последовательности.
Согласно предлагаемому способу период T2 следования стандартных импульсов 49-58 должен быть равен суммарному значению периода T1 следования стандартных импульсов 27-31 (33-48) и длительности T3 третьего информационного сигнала 26, соответствующей интервалу времени между моментами формирования импульсов 24 и 32. С этой целью вход триггера 12 подключают ко второму управляющему входу ждущего мультивибратора 15, поступая на который, третий информационный сигнал 26 увеличивает период следования стандартных импульсов 49-58 до значения T2.
Емкость третьего счетчика 18 выбирают равной десяти, поэтому в момент регистрации стандартного импульса 58, десятого импульса третьей последовательности, на входе счетчика 18 сформируется импульс 59 переполнения, который остановит работу второго и третьего ждущих мультивибраторов 14 и 15, возвратит в исходное состояние пятый электронный ключ 10, сбросит показания счетчиков 16 и 17, и, с целью излучения ультразвуковым преобразователем 1 очередного зондирующего импульса 19, поступит на возбуждающий вход генератора 4. Начинается следующий цикл измерения расстояния Lx до объекта 3.
О значении расстояния Lx, пропорциональном длительности Tx второго информационного сигнала, судят по показаниям счетчиков 16 и 17. При этом, по первому счетчику 16 производят предварительное (грубое) определение Lx, по второму счетчику 17 определяют величину поправки δTx к показаниям счетчика 16.
Как показано на фиг. 2 значение поправки δTx равно длительности T3 третьего информационного сигнала 26, которая в свою очередь пропорциональна количеству "N" стандартных импульсов 43-48, формируемых ждущим мультивибратором 14 в интервале времени NT, равном разности значений 10T2 и 10T1. Поэтому, если емкость второго счетчика 17 выбрать равной десяти, то один стандартный импульс второй последовательности, регистрируемый после формирования десятого импульса 42, будет соответствовать значению δTx равному 0,1T1.
Для приведенного на фиг. 2 частного случая первый счетчик 16 зарегистрирует пять стандартных импульсов 27-31 первой последовательности, а на вход второго счетчика 17 за время 10T2 поступит шестнадцать стандартных импульсов 33-48 второй последовательности. Следовательно, "N" равно шести, δTx равно 0,6T1, а значение расстояния Lx пропорционально значению 5,6T1.
Таким образом, по сравнению с прототипом в предлагаемом способе определение значения расстояния до контролируемого объекта производится при однократном излучении зондирующего импульса, что позволяет повысить точность контроля.
Литература:
1. Авт. св. СССР N 1048322, кл. G 01 F 23/28, 1983.
2. Авт. св. СССР N 1180691, кл. G 01 B 17/02, 1985.
Изобретения относятся к измерительной технике и могут быть использованы для контроля линейных размеров, а также в системах автоматического контроля, управления и регулирования параметров промышленных технологических процессов, например, при определении уровня хозяйственно-питьевой и технологической воды в резервуарах систем водоснабжения. В способе контроля расстояния определение значения расстояния до контролируемого объекта осуществляют при однократном излучении зондирующего импульса. Устройство для реализации способа содержит первый и второй ультразвуковые преобразователи, размещенные вдоль линии, параллельной поверхности контролируемого объекта на базовом расстоянии друг от друга, генератор акустических импульсов, усилитель-формирователь, пять электронных ключей, первый и второй триггеры, первый, второй и третий ждущие мультивибраторы, а также первый, второй и третий счетчики. 2 с.п. ф-лы, 2 ил.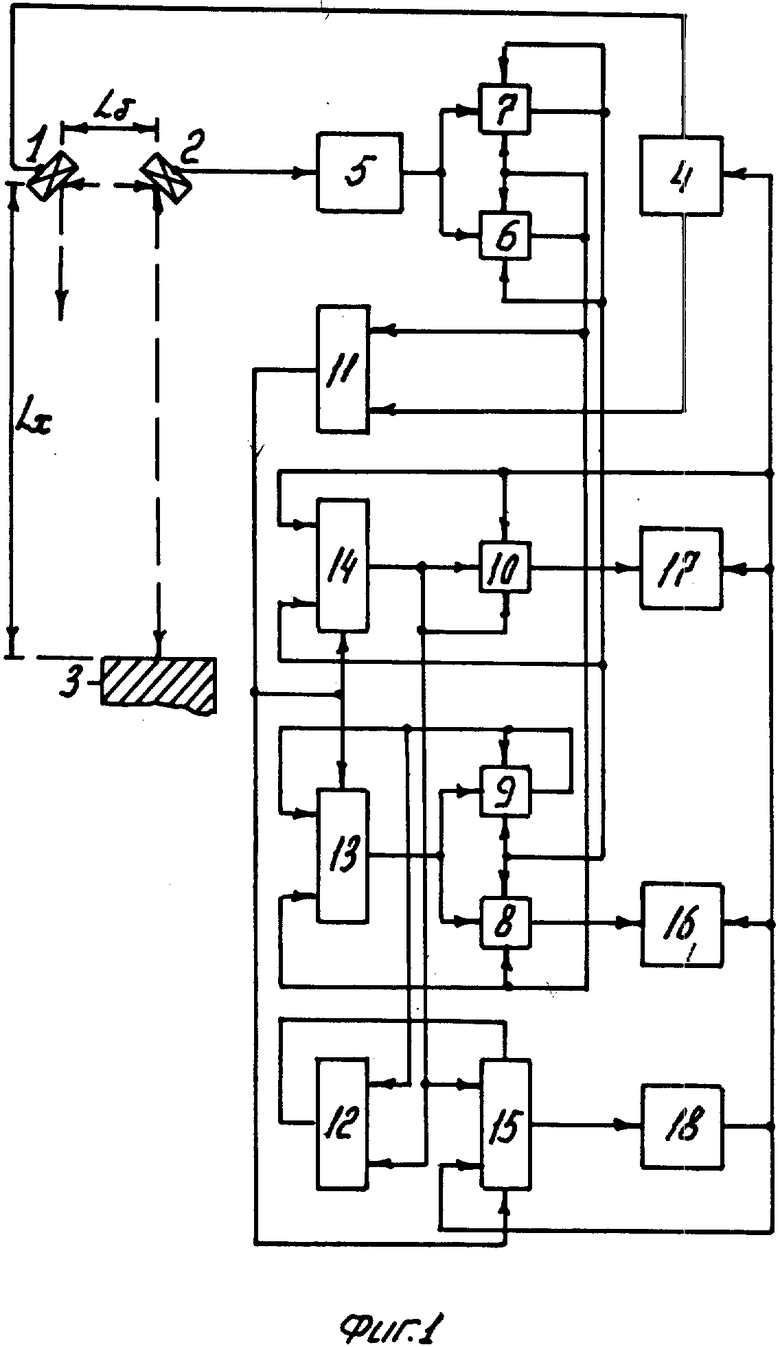
| SU, авторское свидетельство, 1048322, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1180691, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
