Изобретение относится к измерительной технике и может быть использовано в системах автоматического контроля, управления и регулирования параметров промышленных технологических процессов, например, при определении уровня хозяйственно-питьевой и технологической воды в резервуарах систем водоснабжения.
Известен способ контроля расстояния до объекта, заключающийся в том, что формируют информационный импульс длительностью, пропорциональной времени зондирования базового расстояния, используют данный импульс для корректировки периода следования счетных импульсов, излучают акустический импульс в направлении поверхности контролируемого объекта, формируют последовательность информационных сигналов и определяют значение расстояния до объекта по разности счетных импульсов, вырабатываемых в течение двух интервалов времени между информационными сигналами [1].
Устройство для реализации известного способа содержит ультразвуковой преобразователь, блок формирования счетных импульсов и блок формирования выходного сигнала с включением в состав последнего реверсивного счетчика.
Однако известный способ характеризуется недостаточной точностью измерения.
Известен способ контроля расстояния до объекта, предварительными операциями которого являются размещение первой плоскости излучения и плоскости регистрации на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, совмещение второй плоскости излучения с плоскостью регистрации, и который заключается в формировании первого зондирующего импульса в первой плоскости излучения, в переотражения первого зондирующего импульса плоскостью регистрации в направлении поверхности контролируемого объекта, в формировании второго и последующих зондирующих импульсов во второй плоскости излучения, в формировании последовательности счетных импульсов, для предварительной корректировки частоты следования которых используют интервал времени, необходимый для прохождения первым зондирующим импульсом базового расстояния, в заполнении счетными импульсами интервала времени, необходимого для проведения заданного количества регистраций зондирующих импульсов и в считывании результатов контроля [2].
Известно устройство для реализации способа контроля расстояния до объекта, содержащее первый и второй ультразвуковые преобразователи, размещенные на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, семь электронных ключей, к выходу первого из которых подключен первый ультразвуковой преобразователь, а к выходу второго - вход и отпирающий вход шестого электронного ключа и второй ультразвуковой преобразователь, генератор акустических импульсов, к выходу которого подключены вход первого, вход и запирающий вход второго электронных ключей, а вход подключен к выходу третьего электронного ключа, к выходу и отпирающему входу четвертого электронного ключа и к отпирающему входу пятого электронного ключа, усилитель-формирователь, вход которого подключен к выходу шестого электронного ключа, а к выходу подключены входы четвертого и пятого электронных ключей, триггер, первый установочный вход которого подключен к выходу первого электронного ключа, ждущий мультивибратор, управляющий вход которого подключен к выходу триггера, первый установочный вход, объединенный со вторым установочным входом последнего, а также с входом и отпирающим входом седьмого электронного ключа, подключен к выходу пятого электронного ключа, а второй установочный вход объединен с запирающими входами третьего, четвертого, пятого и седьмого электронных ключей и с отпирающими входами первого и второго электронных ключей. Устройство также содержит первый счетчик, вход которого подключен к выходу ждущего мультивибратора, а вход сброса показаний объединен с запирающим входом первого электронного ключа, с отпирающим входом третьего электронного ключа и подключен к выходу первого электронного ключа, и второй счетчик, вход которого объединен с входом третьего электронного ключа с запирающим входом шестого электронного ключа и подключен к выходу седьмого электронного ключа, а к выходу подключен второй установочный вход ждущего мультивибратора.
Так как точность измерения длительности временных интервалов путем их заполнения последовательностью дискретных (счетных) импульсов зависит от периода последних в известном способе для ослабления влияния этой зависимости производят заданное количество переизлучений зондирующего импульса. Т.е. указанное влияние устраняется неполностью, что является недостатком известного способа. Кроме того, в связи с тем, что количество переизлучений зондирующих импульсов в известном способе не определяется соотношением длительности информационного сигнала и периода счетных импульсов, данный способ характеризуется избыточностью получаемой информации. Например, при указанном соотношении, равном 7.1, для проведения точного измерения требуется десять переизлучений, при 7.2 достаточно пяти, а при 7.5 - двух переизлучений зондирующего импульса, но согласно известному способу во всех случаях производят одинаковое количество переизлучений.
Задача изобретения - повышение точности контроля и устранения избыточности выявляемой информации о расстоянии до контролируемого объекта.
Решение поставленной задачи заключается в том, что в способе контроля расстояния до объекта, предварительными операциями которого являются размещение первой плоскости излучения и плоскости регистрации на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, и совмещение второй плоскости излучения с плоскостью регистрации, и который заключается в формировании первого зондирующего импульса в первой плоскости излучения, в переотражении первого зондирующего импульса плоскостью регистрации в направлении поверхности контролируемого объекта, в формировании второго и последующих зондирующих импульсов во второй плоскости излучения и в считывании результатов контроля формируют последовательность стандартных импульсов, длительность и период следования которых предварительно корректируют в зависимости от длительности интервала времени, необходимого для прохождения первым зондирующим импульсом базового расстояния, заполняют стандартными импульсами интервал времени между моментом достижения плоскости регистрации первым зондирующим импульсом и моментом одновременного формирования очередного стандартного импульса и очередного зондирующего импульса и по отношению количества стандартных импульсов к числу регистраций зондирующих импульсов, сформированных во второй плоскости излучения импульсов, судят о значении расстояния до контролируемого объекта.
При этом устройство для реализации способа контроля расстояния до объекта содержит первый и второй ультразвуковые преобразователи, размещенные на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта, шесть электронных ключей, к выходу первого из которых подключен первый ультразвуковой преобразователь, а к выходу второго - второй ультразвуковой преобразователь, генератор акустических импульсов, к первому выходу которого подключен вход первого и вход второго электронных ключей, а вход подключен к выходу четвертого электронного ключа, усилитель-формирователь, к выходу которого подключен вход четвертого и вход пятого электронных ключей, триггер, ждущий мультивибратор, управляющий вход которого подключен к выходу триггера, первый установочный вход объединен со вторым установочным входом последнего и подключен к выходу пятого электронного ключа, а второй установочный вход объединен с запирающим входом четвертого электронного ключа и с отпирающим входом первого электронного ключа, первый счетчик, вход которого подключен к выходу ждущего мультивибратора, и второй счетчик.
Поставленная задача решается тем, что в его состав включен логический элемент И, первый вход которого подключен к выходу ждущего мультивибратора, а второй вход объединен с входом второго счетчика и подключен к выходу четвертого электронного ключа, при этом вход генератора акустических импульсов объединен с запирающим входом третьего электронного ключа, вход усилителя-формирователя подключен к выходу третьего электронного ключа, первый установочный вход триггера объединен с запирающим входом шестого электронного ключа и подключен к выходу данного ключа, второй установочный вход триггера объединен с отпирающим входом четвертого электронного ключа и с запирающим выходом пятого электронного ключа, вход третьего электронного ключа подключен к выходу второго электронного ключа, вход шестого электронного ключа объединен с запирающим входом первого электронного ключа, с отпирающими входами второго и третьего электронных ключей и подключен к второму выходу генератора акустических импульсов, а вход сброса показаний первого и вход сброса показаний второго счетчиков объединены с запирающим входом второго электронного ключа, с отпирающими входами первого, пятого и шестого электронных ключей и подключены к выходу логического элемента И.
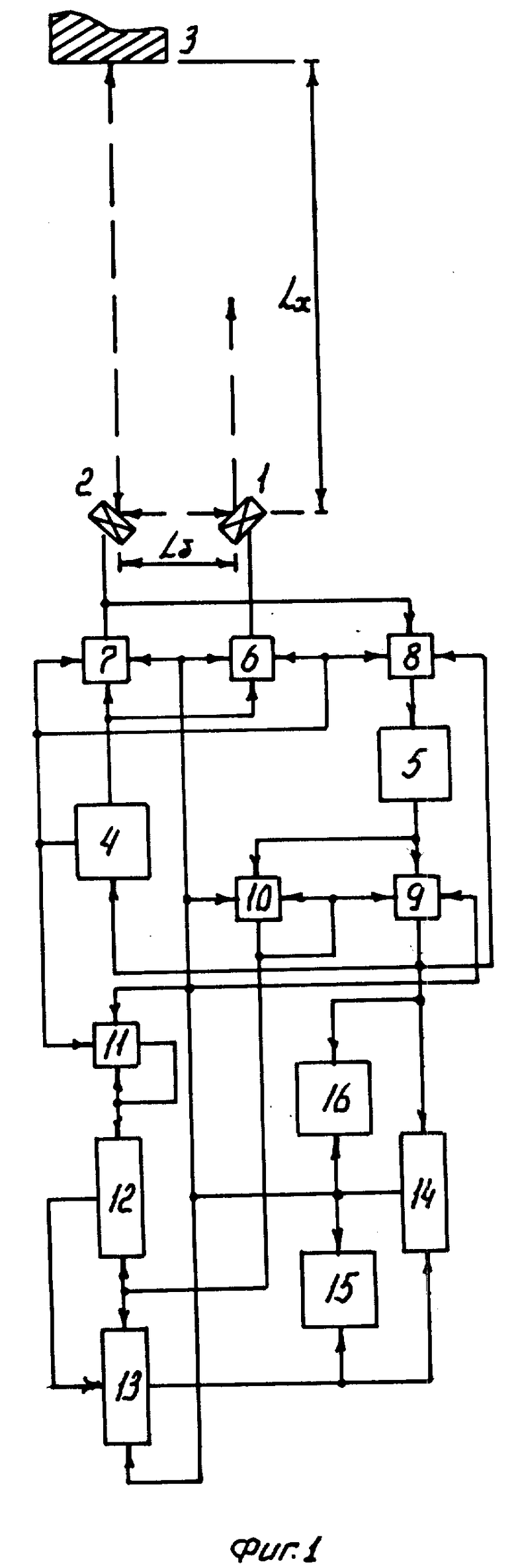
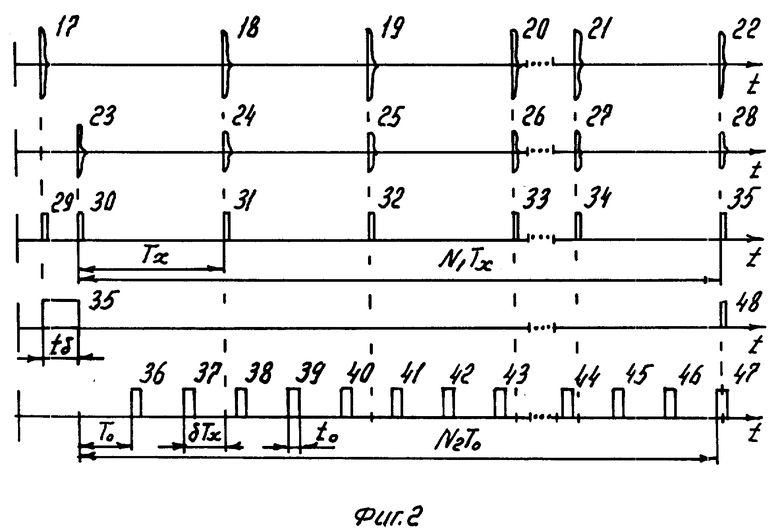
На фиг. 1 представлена схема устройства для реализации способа контроля расстояния до объекта; на фиг.2 - временные диаграммы, поясняющие способ и работу устройства.
Устройство содержит первый и второй ультразвуковые преобразователи 1 и2, размещенные вдоль линии, параллельной поверхности контролируемого объекта 3, генератор 4 акустических импульсов, усилитель-формирователь 5, электронные ключи 6 - 11, триггер 12, ждущий мультивибратор 13, логический элемент И 14 и счетчики 15, 16 (фиг.1).
Способ заключается в следующем.
Предварительными операциями предлагаемого способа являются размещение первой плоскости излучения зондирующего импульса 17 и плоскости его регистрации на базовом расстоянии друг от друга вдоль линии, параллельной поверхности контролируемого объекта 3, и совмещение с плоскостью регистрации второй плоскости излучения зондирующих импульсов 18 - 22. При этом базовое расстояние Lб задается первым и вторым ультразвуковыми преобразователями 1 и 2 (фиг.1).
Процесс контроля расстояния Lб до объекта 3 начинается в момент формирования генератором 4 электрического импульса 29 (фиг.2). Сформированный на первом выходе генератора 4 импульс 29 проходит открытый в исходном состоянии первый электронный ключ 6 и поступает на первый ультразвуковой преобразователь 1.
Возбуждаясь, преобразователь 1 посылает в направлении плоскости регистрации первый зондирующий импульс 17. Со второго выхода генератора 4 электрический импульс 29 через открытый в исходном состоянии шестой электронный ключ 11 поступает на первый установочный вход триггера 12. Триггер 12 запускается и на управляющий вход ждущего мультивибратора 13 начинает поступать электрический сигнал 35. Кроме того, сформированный на втором выходе генератора 4 импульс 29 своим задним фронтом закрывает первый ключ 6 и отпирает второй и третий электронные ключи 7 и 8.
Спустя время tб после момента излучения зондирующий импульс 17 в виде акустического сигнала 23 достигнет плоскости регистрации, в которой установлен второй преобразователь 2, и переотражается ею в направлении поверхности контролируемого объекта 3. При этом преобразователем 2 производится регистрация акустического импульса 23, т.е. преобразование его в электрический сигнал, поступающий через третий ключ 8 на вход усилителя-формирователя 5. Сформированный усилителем 5 импульс 30 проходит открытый в исходном состоянии пятый электронный ключ 10, запирает его за собой, отпирает четвертый ключ 9 и поступает на второй установочный вход триггера 12 и на первый установочный вход ждущего мультивибратора 13. Формирование триггером 12 сигнала 35 прекращается, а на первый вход логического элемента 14 и на вход первого счетчика 15 начинает поступать последовательность стандартных импульсов 36 - 47 мультивибратора 13.
Длительность tб сигнала 35 не зависит от значения расстояния Lx, поэтому сигнал 35 направляют на управляющий вход ждущего мультивибратора 13, т.е. используют данный сигнал для приведения (корректировки) длительности t0 и периода T0 следования стандартных импульсов 36 - 47 в соответствие со значением скорости распространения зондирующего импульса 17.
Спустя время Tx, необходимое для прохождения зондирующим импульсом 17 контролируемого расстояния Lx от плоскости регистрации до поверхности объекта 3 и для повторного прохождения расстояния L в обратном направлении, ультразвуковой преобразователь 2 зарегистрирует зондирующий импульс 17, достигший рабочей поверхности преобразователя 2 в виде акустического сигнала 24. Соответствующий сигналу 24 электрический импульс 31 с выхода усилителя-формирователя 5 проходит открытый импульсом 30 третий электронный ключ 8 и поступает на вход генератора 4. Начинается процесс автоциркуляции акустических и электрических импульсов по контуру: генератор 4 - ключ 7 - преобразователь 2 (акустические импульсы 18 - 22) - объект 3 - преобразователь 2 (акустические сигналы 25 - 28) - ключ 8 - усилитель-формирователь 5 (электрические импульсы 32 - 35) - ключ 9 - генератор 4. При этом на время излучения второго и последующих зондирующих импульсов 18 и 19 - 22 вход усилителя-формирователя 5 отключают от преобразования 2 электронным ключом 8, запирающий вход которого подключен к выходу четвертого ключа 9, а отпирающий вход - ко второму выходу генератора 4.
Соответствующие акустическим сигналам 24 - 28 электрические импульсы 31 - 35 через ключ 3 поступают на второй вход логического элемента 14 и на вход второго счетчика 16. Т.е. процесс автоциркуляции сопровождается регистрацией первым счетчиком 15 стандартных импульсов 36 - 47 ждущего мультивибратора 13 и регистрацией вторым счетчиком импульсов 31 - 35 усилителя 5, равных по количеству N1 зондирующим импульсам 18 - 22, формируемых во второй плоскости излучения. Регистрация указанных импульсов производится в интервале времени N1Tx между моментом достижения плоскости регистрации первым зондирующим импульсом 17 (сигнал 23) и моментом одновременного формирования стандартного импульса 47 и очередного зондирующего импульса 22 (импульс 35): при одновременном поступлении импульсов 35 и 47 на первый и второй входы логического элемента И 14 на его выходе, подключенном к объединенному входу сброса показаний счетчиков 15 и 16, сформируется импульс 48. Поступив на второй установочный вход ждущего мультивибратора 13, импульс 48 останавливает его работу. Кроме того, импульс 48 своим передним фронтом возвратит в исходные состояния ключи 6, 7, 9, 10 и 11, в результате чего зондирующий импульс 22 сформируется в первой плоскости излучения. Т.е. импульс 22 является первым зондирующим импульсом следующего цикла измерения расстояния Lx. При этом значение Lx в конце каждого цикла измерения определяют по отношению показаний первого и второго счетчиков 15 и 16.
Таким образом в предлагаемом способе количество зондирующих импульсов 17 - 21, формируемых при проведении одного цикла измерения, не является величиной постоянной. Она зависит, во-первых, от значения длительности t0 стандартных импульсов, во-вторых, от соотношения значений T0 и t0. В первом случае это повышает по сравнению с прототипом точность контроля, т.к. устраняется ее зависимость от значения периода T0 стандартных импульсов, во втором приводит к тому, что информация о контролируемом расстоянии не является избыточной. Например, при соотношении значений T0 и t0, равном 7,1, будет сформировано десять стандартных импульсов, равном 7,2 - пять, а равным 7,5 - всего два, что в свою очередь для большинства значений контролируемого расстояния позволяет сократить интервал времени, необходимого для проведения одного цикла измерения.
Изобретение может быть использовано в системах автоматического контроля и регулирования параметров промышленных технологических процессов, например, при определении уровня хозяйственно-питьевой и технологической воды в резервуарах систем водоснабжения. Способ контроля расстояния до объекта и устройство для его реализации позволяют повысить точность и устранить избыточность выявляемой информации о расстоянии до контролируемого объекта за счет того, что количество переизлучений зондирующих импульсов определяется соотношением длительности информационного сигнала и периода счетных импульсов. Устройство содержит два ультразвуковых преобразователя, размещенные вдоль линии, параллельной поверхности контролируемого объекта, генератор акустических импульсов, усилитель-формирователь, шесть электронных ключей, триггер, ждущий мультивибратор, логический элемент И и два счетчика. 2 с.п.ф-лы, 2 ил.