Настоящее изобретение относится к способу определения направления скважины во время бурения этой скважины.
В частности, настоящее изобретение относится к способу определения направления скважины во время бурения этой скважины путем использования трехосевого блока акселерометр-магнитометр, установленного в применяемой бурильной колонне, при этом указанный способ включает следующие этапы:
- измерение составляющих ускорения силы тяжести gx, gy, gz известного вектора  ускорения силы тяжести для определения угла наклона θ и угла поворота ϕ относительно верхней стороны скважины,
ускорения силы тяжести для определения угла наклона θ и угла поворота ϕ относительно верхней стороны скважины,
- измерение составляющих магнитного поля Bx, By, Bz полного магнитного поля  для определения азимутального угла ψ, x, y, z обозначают составляющие вектора в декартовой системе координат XYZ, привязанной к упомянутому блоку, во время упомянутого бурения, и ψ,θ, и ϕ обозначают углы, определяющие повороты между системой координат XYZ и декартовой системой координат NEV, где N направление на магнитный север, V - вертикальное
для определения азимутального угла ψ, x, y, z обозначают составляющие вектора в декартовой системе координат XYZ, привязанной к упомянутому блоку, во время упомянутого бурения, и ψ,θ, и ϕ обозначают углы, определяющие повороты между системой координат XYZ и декартовой системой координат NEV, где N направление на магнитный север, V - вертикальное  - направление и E - направление на восток.
- направление и E - направление на восток.
Такой способ известен из патента США 4163324. В нем показано использование бурильной колонны, содержащей буровую головку, которая связана, с одной стороны, с немагнитной утяжеленной трубой бурильной колонны, а с другой стороны, с набором утяжеленных бурильных труб из магнитного материала. В свою очередь упомянутый набор связан с бурильной трубой. Немагнитная труба содержит геодезический прибор, например трехосевой блок акселерометр/магнитометр. При измерении полного магнитного поля  дополнительно к магнитному полю земли
дополнительно к магнитному полю земли  включается возмущающее магнитное поле
включается возмущающее магнитное поле  , например, от вышеупомянутого бурового долота и/или набора утяжеленных труб. В указанном патенте предполагается, что для учета влияния магнитной бурильной колонны достаточно только использовать аппроксимацию вектора
, например, от вышеупомянутого бурового долота и/или набора утяжеленных труб. В указанном патенте предполагается, что для учета влияния магнитной бурильной колонны достаточно только использовать аппроксимацию вектора  на ось скважины Z, которая дает
на ось скважины Z, которая дает  ; указанное предположение приводит к тому, что на первом этапе вычисляется неправильный азимут, а на следующем этапе применяется метод и итераций для определения по меньшей мере поправки первого порядка. Во многих случаях, однако, допущение, сделанное только относительно
; указанное предположение приводит к тому, что на первом этапе вычисляется неправильный азимут, а на следующем этапе применяется метод и итераций для определения по меньшей мере поправки первого порядка. Во многих случаях, однако, допущение, сделанное только относительно  и аппроксимация
и аппроксимация  , приводят к результатам, далеким от реальных.
, приводят к результатам, далеким от реальных.
В патенте США 4682421 представлен способ определения правильного полярного угла путем вычисления возмущающего ошибочного магнитного поля M в месте нахождения прибора.
В частности, раскрыт двухступенчатый подход к решению вышеупомянутой проблемы. После определения вектора ускорения силы тяжести  и измерения полного магнитного поля
и измерения полного магнитного поля  , которое равно
, которое равно  , на первом этапе определяется составляющая
, на первом этапе определяется составляющая  , лежащая в плоскости, перпендикулярной оси,
, лежащая в плоскости, перпендикулярной оси,  . Для осуществления указанного первого этапа необходимо выполнить по крайней мере три x - y - измерений, поскольку
. Для осуществления указанного первого этапа необходимо выполнить по крайней мере три x - y - измерений, поскольку  выводится графически из круга, построенного на основании упомянутых измерений. Следовательно, упомянутые измерения выполняются при вращении бурильной колонны на одном месте относительно оси скважины, которая является осью Z в системе координат при измерениях. Специалистам в данной области техники понятно, что упомянутое вращение бурильной колонны в упомянутом месте будет приводить к задержке процесса бурения скважины.
выводится графически из круга, построенного на основании упомянутых измерений. Следовательно, упомянутые измерения выполняются при вращении бурильной колонны на одном месте относительно оси скважины, которая является осью Z в системе координат при измерениях. Специалистам в данной области техники понятно, что упомянутое вращение бурильной колонны в упомянутом месте будет приводить к задержке процесса бурения скважины.
В этом патенте показано, как на втором этапе геометрически определяется  . Однако, применение правила косинуса (как показано на фиг.3 указанного патента) для получения минимальной величины ошибки должно метаматически ограничиваться плоскостью, содержащей все релевентные параметры, включая θ и θ0, поэтому определение величины по представленному методу может рассматриваться только как аппроксимация. Следовательно, возможные ошибки в
. Однако, применение правила косинуса (как показано на фиг.3 указанного патента) для получения минимальной величины ошибки должно метаматически ограничиваться плоскостью, содержащей все релевентные параметры, включая θ и θ0, поэтому определение величины по представленному методу может рассматриваться только как аппроксимация. Следовательно, возможные ошибки в  зависят от ошибок в параметрах, уже используемых в упомянутом правиле косинуса.
зависят от ошибок в параметрах, уже используемых в упомянутом правиле косинуса.
Таким образом, техническим результатом настоящего изобретения является решение проблемы, связанной с необходимостью поворота бурильной колонны каждый раз, когда требуется определить направление скважины.
Следующим техническим результатом настоящего изобретения является создание способа, обеспечивающего определение полярных углов (азимутов) в результате прямых вычислений.
Другим техническим результатом настоящего изобретения является создание способа, в результате которого величину параметров вычисляют независимо, благодаря чему не происходит увеличения ошибок при вычислениях.
Таким образом, способ, как показано выше, усовершенствован в соответствии с настоящим изобретением так, что  измеряются по крайней мере на двух глубинах скважины li и li+1, при этом ϕi≠ϕi,ψi и ψi+1 вычисляются в соответствии с
измеряются по крайней мере на двух глубинах скважины li и li+1, при этом ϕi≠ϕi,ψi и ψi+1 вычисляются в соответствии с  и sin2ψi+cos2ψi= sin2ψi+1+cos2ψi+1
и sin2ψi+cos2ψi= sin2ψi+1+cos2ψi+1
или одного из эквивалентов этого соотношения, где i = 1, 2 ...,  - местное магнитное поле земли,
- местное магнитное поле земли,  - магнитное поле, возмущающее
- магнитное поле, возмущающее  обозначает так называемые "Транспонированные" матрицы для преобразований координат из NEV - системы в XYZ - систему через углы Эйлера ϕ,θ и ψ .
обозначает так называемые "Транспонированные" матрицы для преобразований координат из NEV - системы в XYZ - систему через углы Эйлера ϕ,θ и ψ .
В следующем варианте настоящего изобретения  измеряются по крайней мере на трех длинах скважины li, li+1 и li+2 так, что ϕi≠ϕi+1≠ϕi+2, а ψi,ψi+1, и ψi+2 вычисляются в соответствии с соотношением:
измеряются по крайней мере на трех длинах скважины li, li+1 и li+2 так, что ϕi≠ϕi+1≠ϕi+2, а ψi,ψi+1, и ψi+2 вычисляются в соответствии с соотношением:
где
i = 1, 2, 3...
В предпочтительном варианте изобретения, как показано выше, проводится этап проверки полученного в результате азимутального угла, при этом проверяется уравнение (sin2ψ +cos2ψ)=1 и сравнивается для каждого ψ .
Таким образом, изобретение в том виде, как оно раскрыто выше, имеет преимущество, заключающееся в том, что во время бурения скважины измеряемые величины получают, по существу, непрерывно и для определения направления скважины и для проверки самих измеренных величин. Следовательно, неточности, возникающие в процессе измерения, например, из-за образования неожиданных условий или аппаратурных погрешностей, отслеживаются быстро и надежно.
В другом варианте настоящего изобретения определяется возмущающее поле  . Выгода заключается в том, что
. Выгода заключается в том, что  получается в результате прямых вычислений, поэтому не требуется использовать методы аппроксимации, которые применяются в методе итераций или при графическом определении параметров.
получается в результате прямых вычислений, поэтому не требуется использовать методы аппроксимации, которые применяются в методе итераций или при графическом определении параметров.
На фиг.1 изображено обычное размещение блока акселерометр/магнитометр в скважине для измерения  относительно одной и той же декартовой системы координат;
относительно одной и той же декартовой системы координат;
на фиг. 2а, б - система NEB , привязанная к земле и закрепленному инструменту, и система координат XYZ, связанная с измерительным блоком;
на фиг.3 - общеизвестные принципы ориентации системы координат и направления скважины, связанные с преобразованиями координат через угол Эйлера;
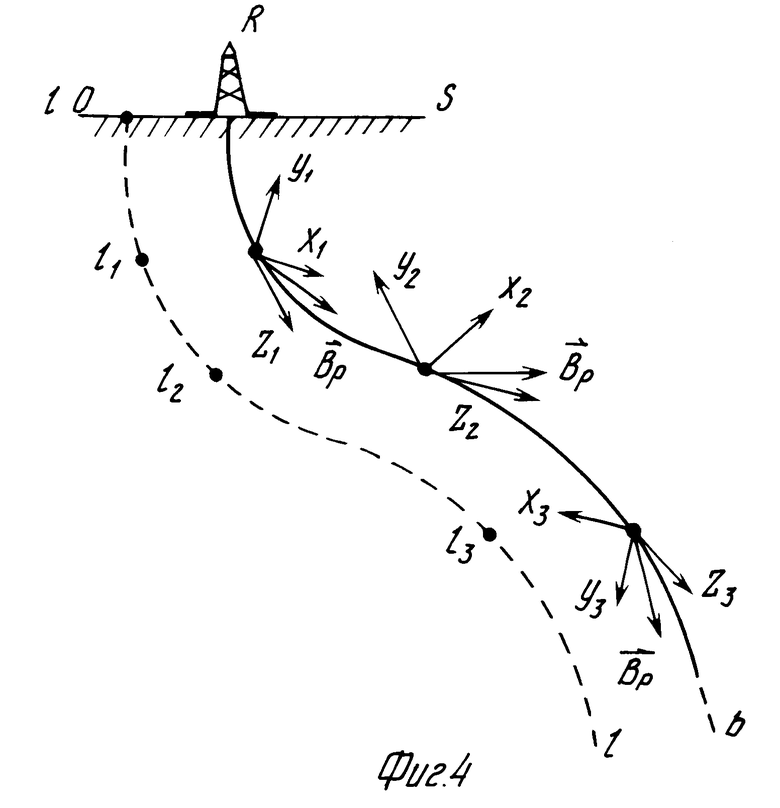
на фиг. 4 - схематично представлен способ определения направления скважины во время бурения в соответствии с настоящим изобретением.
Обратимся к фиг. 1, на которой схематично показано размещение геодезического прибора в скважине. Указанный прибор содержит хорошо известный блок акселерометр/магнитометр для измерения составляющих вектора силы тяжести gx, gy, gz и составляющих вектора магнитного поля Bx, By, Bz. Прибор расположен так, что Z - ось прибора ориентирована вдоль оси скважины. Соответственно, X и Y - оси акселерометра и магнитометра, которые являются составными частями прибора, взаимно ориентированы так, как показано на этой фигуре.
На фиг. 2а и 2б схематично показаны используемые системы координат. На фиг. 2A показана система NEV относительно земли, N - соответственно местное направление на магнитный север, V - вертикальное направление, более точно, направление локального вектора силы тяжести, а E - направление на восток, перпендикулярное плоскости, в которой лежат N и V. На фиг. 2б показана декартовая система с осями XYZ, где ось Z ориентирована вдоль оси скважины.
На фиг.3 /которую можно найти, например, в патенте США 4163324/ показаны обе системы NEV и XYZ относительно схематично представленной скважины l и относительно друг друга. Как показано на фигуре, последовательность из трех поворотов связывает вектора в каждой из систем, т.е. через азимутальный угол ψ , угол наклона θ , угол поворота ϕ относительно верхней стороны, так называемые углы Эйлера, которые хорошо известны специалистам в этой области техники:
NEV→ ψ→ N1E1V → θ → N2E1V → XYZ
Указанные повороты являются обычными преобразованиями координат, выраженными с помощью матриц, имеющих для вектора PXYZ и PNEV следующий вид:
PNEV=[ψ][θ][ϕ]PXYZ или эквивалентно,
PXYZ=[ϕ]T[θ]T[ψ]TPNEV
где

[ψ]T,[θ]T,[ϕ]T - соответствующие так называемые "транспонированные матрицы". Приведенные выше формулы для любой векторной пары PXYZ - PNEV могут также применяться для вектора  , имеющего вид (O, O, g), и вектора
, имеющего вид (O, O, g), и вектора  , имеющего вид (BN, O, BV), оба вектора представлены в системе координат NEV.
, имеющего вид (BN, O, BV), оба вектора представлены в системе координат NEV.
Таким образом:
Заметим, что для конкретного примера вектора силы тяжести угол наклона θ и угол поворота относительно верхней стороны скважины ϕ могут быть легко определены для каждого места измерения, как, например, можно прочитать в вышеупомянутом патенте США 4163324.
На фиг. 4 схематично показан способ определения направления скважины во время бурения указанной скважины. С вышки R на поверхности земли S бурится скважина b. Для ясности нарисована параллельная кривая l (пунктирная линия) с указанием глубин скважины /или длин скважина, или мест скважины/ l0, l1, . . . , которые измеряются вдоль скважины, при этом в l0 на S выполняются местные измерения  и
и  .
.
Схематично показаны Xi, Yi, Zi, демонстрирующие различные положения измерительного инструмента в скважине. Кроме того, показано возмущающее магнитное поле  . Считается, что это Bp зависит от особенностей бурильной колонны, как это пояснялось выше, в результате это приводит к повороту и параллельному переносу указанного вектора в соответствии с поворотом и параллельным переносом системы координат XYZ, связанной с измерительным инструментом в бурильной колонне.
. Считается, что это Bp зависит от особенностей бурильной колонны, как это пояснялось выше, в результате это приводит к повороту и параллельному переносу указанного вектора в соответствии с поворотом и параллельным переносом системы координат XYZ, связанной с измерительным инструментом в бурильной колонне.
Из вышеупомянутого ясно, что на каждой глубине скважины или в месте li полное магнитное поле  может быть записано как
может быть записано как  . Однако для вычисления этой векторной суммы должна быть выбрана общая база или общая система координат. Как пояснялось выше, обычно применяются система координат XYZ и система координат NEV.
. Однако для вычисления этой векторной суммы должна быть выбрана общая база или общая система координат. Как пояснялось выше, обычно применяются система координат XYZ и система координат NEV.
Для того, чтобы получить направление скважины, помимо углов θi,ϕi , требуется определить азимутальный угол ψi . Таким образом, вышеупомянутая векторная сумма может быть выражена как: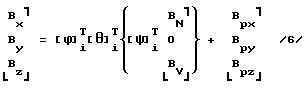
для любой глубины скважины li или номера измерения i. Из этого уравнения можно легко увидеть, что Bx, By и Bz известны, поскольку они измеряются, ϕ - и θ - матрицы известны, поскольку вышеупомянутым способом определяются ϕ и θ, , BN и BV известны из геомагнитных данных и, следовательно, должны быть получены еще азимутальный угол ψ и векторные компоненты возмущения магнитного поля Bpx, Bpy, Bpz.
Согласно изобретению измеряются компоненты  для по крайней мере двух глубин скважины li и li+1, которые могут быть записаны как l1 и l2. Затем, для двух измерений получают следующие уравнения путем перезаписи вышеуказанного уравнения (6):
для по крайней мере двух глубин скважины li и li+1, которые могут быть записаны как l1 и l2. Затем, для двух измерений получают следующие уравнения путем перезаписи вышеуказанного уравнения (6):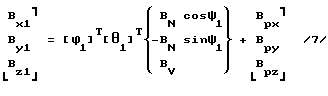

Можно видеть, что путем прямых вычислений вышеприведенных уравнений (7) и (8) получают 6 скалярных уравнений для каждого из векторных компонентов x, y и z, которые включают 7 неизвестных параметров, т.е. cosψ1, sinψ1, cosψ2,sinψ2 , Bpx, Bpy и Bpz.
Для того чтобы получить единственное решение для ψ1 и ψ2, берут в качестве седьмого скалярного уравнения
sin2ψ1+cos2ψ1= sin2ψ2+cos2ψ2
Специалистам в данной области техники ясно, что могут использоваться эквивалентные уравнения: sin2ψ1+cos2ψ1= 1 или sin2ψ2+cos2ψ2= 1 . Исходя из математических соотношений очевидно, что ϕ1 ≠ ϕ2 и, следовательно, бурильная колонная должна быть повернута. По существу, этот критерий выполняется всегда, потому что бурильная колонна всегда поворачивается между местами измерений во время бурения скважины. Таким образом, преимущество заключается в том, что используются повороты бурильной колонны, которые обычно осуществляют во время процесса бурения, и не происходит остановка процесса бурения и последующий поворот бурильной колонны, как в способе, на который выше была дана ссылка. После того, как вычислены величины для указанных 7 параметров, величины ψi получают в соответствии с соотношением
На основе той же самой идеи для трех измерений в соответственно трех местах измерений, например l1, l2 и l3, получают следующие уравнения, два из которых аналогичны приведенным выше уравнениям (7) и (8):

Из 9 скалярных уравнений, которые получаются при перезаписи вышеуказанных уравнений (7), (8) и (10), видно, что образуется полная система уравнений с 9 неизвестными параметрами, аналогичным образом, как показано выше, и никакие дополнительные уравнения не требуются для их однозначного решения. Для представленной системы уравнений cosψ1,sinψ1,cosψ2,sinψ2,cosψ3,sinψ3 , Bpx, Bpy и Bpz опять могут рассматриваться как независимые переменные. Опять ψi - величины получаются в соответствии с вышеуказанным уравнением (9).
Отметим, что, как и в случае с только двумя измерениями, ϕ1 ≠ ϕ2≠ ϕ3 и никакие специальные действия для поворотов не требуются.
Следующий вариант настоящего изобретения включает процедуру проверки.
В том случае, когда измерения выполнятся в двух местах l1 и l2 для проверки применяются соотношения sin2ψ1+cos2ψ1=1 или sin2ψ2+cos2ψ2=1 , которые являются эквивалентами уравнения: sin2ψ1+cos2ψ1= sin2ψ2+cos2ψ2 . Если появляются значительные отклонения от 1, то производится новый набор измерений  на следующей глубине скважины и процедура проверки повторяется. Преимущество в том, что для такой проверки также не требуются никакие дополнительны повороты. Опять должны быть только измерены различные углы поворота относительно верхней стороны скважины.
на следующей глубине скважины и процедура проверки повторяется. Преимущество в том, что для такой проверки также не требуются никакие дополнительны повороты. Опять должны быть только измерены различные углы поворота относительно верхней стороны скважины.
Как и в случае выполнения измерений в по крайней мере трех местах и, следовательно, при использовании 9 уравнений для определения азимутальных углов ψ1,ψ2 и ψ3 теперь для первого раза применяют равенства sin2ψi+cos2ψi=1 или один из их эквивалентов: sin2ψi+cos2ψi= sin2ψi+1+cos2ψi+1 для соответствующей величины i. Те же наблюдения сделаны относительно использования и применения указанной процедуры проверки.
На следующем этапе  может быть определено точно и надежно. В большинстве случаев
может быть определено точно и надежно. В большинстве случаев  связано с характеристиками бурильной колонны. Кроме того, при таком определении
связано с характеристиками бурильной колонны. Кроме того, при таком определении  могут быть отслежены неожиданные изменения в
могут быть отслежены неожиданные изменения в  , связанные, например, с неисправностью инструмента, магнитными бурями, посторонними магнитными полями и т.д.
, связанные, например, с неисправностью инструмента, магнитными бурями, посторонними магнитными полями и т.д.
Как пояснялось выше, для одного или другого метода определения параметров требуется только два или три набора измерений соответственно. Понятно, что при нормальных условиях работы, когда выполняют скважины глубиной несколько тысяч футов или несколько километров, получают множество наборов измерений. Следовательно, направления скважины могут определяться быстро и надежно без специальных усилий.
Специалистам в этой области техники из предшествующего описания будут очевидны различные модификации настоящего изобретения. Предполагается, что такие модификации входят в объем приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА СОЗДАНИЯ СТВОЛА СКВАЖИНЫ В ПОЧВЕННОЙ ФОРМАЦИИ | 1995 |
|
RU2131975C1 |
| ИНСТРУМЕНТ ДЛЯ ПРОХОДКИ ОБЪЕКТА | 2004 |
|
RU2348786C2 |
| ИНСТРУМЕНТ ДЛЯ ПРОХОДКИ ОБЪЕКТА | 2004 |
|
RU2348787C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 1995 |
|
RU2149248C1 |
| БУРИЛЬНЫЙ СНАРЯД С УМЕНЬШЕННОЙ ТЕНДЕНЦИЕЙ ПРЕРЫВИСТОГО ПЕРЕМЕЩЕНИЯ | 1998 |
|
RU2197613C2 |
| ОТКЛОНЯЮЩЕЕ УСТРОЙСТВО ДЛЯ БУРЕНИЯ | 1994 |
|
RU2118440C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| БУРОВОЕ ДОЛОТО | 1998 |
|
RU2206701C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ГАЗА В СКВАЖИНЕ ВО ВРЕМЯ БУРЕНИЯ | 2003 |
|
RU2315864C2 |
| БУРИЛЬНАЯ СИСТЕМА | 2000 |
|
RU2245984C2 |


Способ определения направления скважины во время бурения включает определение угла наклона θ и угла поворота относительно верхней стороны скважины ϕ из измерений ускорения силы тяжести  и определение азимутального угла ψ из измерений магнитного поля
и определение азимутального угла ψ из измерений магнитного поля  эти углы определяются в обычных системах координат XYZ и NEV, связанных преобразованиями координат через углы Эйлера. В частности,
эти углы определяются в обычных системах координат XYZ и NEV, связанных преобразованиями координат через углы Эйлера. В частности,  измеряются по крайней мере на двух глубинах скважины, так что ϕi≠ϕi+1 при этом ψi и ψi+1 вычисляются из
измеряются по крайней мере на двух глубинах скважины, так что ϕi≠ϕi+1 при этом ψi и ψi+1 вычисляются из
где i - номер измерения,  - местное магнитное поле земли и
- местное магнитное поле земли и  - возмущающее магнитное поле. В результате, точно определяются возмущающие магнитные поля, возникающие, например, из-за перегретых участков или близости к элементам магнитным стального бура при бурении или каротажной колонны вблизи от прибора для измерения В. 2 с. и 3 з.п.ф-лы, 4 ил.
- возмущающее магнитное поле. В результате, точно определяются возмущающие магнитные поля, возникающие, например, из-за перегретых участков или близости к элементам магнитным стального бура при бурении или каротажной колонны вблизи от прибора для измерения В. 2 с. и 3 з.п.ф-лы, 4 ил.
 ускорения силы тяжести для определения угла наклона θ и угла ϕ поворота относительно верхней стороны скважины и измерение компонентов магнитного поля Bx, By, Bz полного магнитного поля
ускорения силы тяжести для определения угла наклона θ и угла ϕ поворота относительно верхней стороны скважины и измерение компонентов магнитного поля Bx, By, Bz полного магнитного поля  для определения азимутального угла ψ, где x, y, z обозначают векторные компоненты в декартовой системе координат XYZ, привязанной к трехосевому блоку во время бурения, а ψ,θ, и ϕ обозначают углы, определяющие повороты между системой координат XYZ и декартовой системой координат NEV, где N - направление на северный магнитный полюс, V - вертикальное направление
для определения азимутального угла ψ, где x, y, z обозначают векторные компоненты в декартовой системе координат XYZ, привязанной к трехосевому блоку во время бурения, а ψ,θ, и ϕ обозначают углы, определяющие повороты между системой координат XYZ и декартовой системой координат NEV, где N - направление на северный магнитный полюс, V - вертикальное направление  и Е - направление на восток, отличающийся тем, что
и Е - направление на восток, отличающийся тем, что  и
и  измеряются по крайней мере на двух глубинах скважины li и li + 1 так, что ϕi≠ϕi+1,ψi и ψi+1 вычисляются в соответствии с соотношениями
измеряются по крайней мере на двух глубинах скважины li и li + 1 так, что ϕi≠ϕi+1,ψi и ψi+1 вычисляются в соответствии с соотношениями
sin2ψi+ cos2ψi = sin2ψi+1+ cos2ψi+1
или одного из его эквивалентов,
где i = 1, 2, ...; местное магнитное поле земли;
местное магнитное поле земли; магнитное поле, возмущающее Ве;
магнитное поле, возмущающее Ве;
[ ]Т обозначает "транспонирование" матрицы для преобразований координат из NEV системы координат в XYZ систему с помощью углов Эйлера ϕ, θ и ψ.
2. Способ по п.1, отличающийся тем, что дополнительно проверяют условия равенства 1 упомянутого эквивалента (sin2ψi + cos2ψi), измеряют  по крайней мере на одной дополнительной глубине скважины li + 2, если (sin2ψi + cos2ψi)≠1, где ϕi≠ϕi+1≠ϕi+2, вычисляют ψ1+2, выполняют следующий этап проверки.
по крайней мере на одной дополнительной глубине скважины li + 2, если (sin2ψi + cos2ψi)≠1, где ϕi≠ϕi+1≠ϕi+2, вычисляют ψ1+2, выполняют следующий этап проверки. ускорения силы тяжести для определения угла наклона θ и угла поворота относительно верхней стороны скважины ϕ и измерение компонентов Bx, By, Bz магнитного поля полного магнитного поля
ускорения силы тяжести для определения угла наклона θ и угла поворота относительно верхней стороны скважины ϕ и измерение компонентов Bx, By, Bz магнитного поля полного магнитного поля  для определения азимутального угла ψ, где x, y и z обозначают векторные компоненты в декартовой системе координат XYZ, привязанной к трехосевому блоку во время бурения, а ψ, θ0и ϕ обозначают углы, определяющие повороты между упомянутой системой координат XYZ и декартовой системой координат NEV, где N - направление на северный магнитный полюс, V - вертикальное направление
для определения азимутального угла ψ, где x, y и z обозначают векторные компоненты в декартовой системе координат XYZ, привязанной к трехосевому блоку во время бурения, а ψ, θ0и ϕ обозначают углы, определяющие повороты между упомянутой системой координат XYZ и декартовой системой координат NEV, где N - направление на северный магнитный полюс, V - вертикальное направление  и Е - направление на восток, отличающееся тем, что
и Е - направление на восток, отличающееся тем, что  измеряются по крайней мере на трех глубинах скважины li, li + 1 и li + 2 так, что ϕi≠ϕi+1≠ϕi+2 и ψi,ψi+1и ψi+2 вычисляются в соответствии с соотношением
измеряются по крайней мере на трех глубинах скважины li, li + 1 и li + 2 так, что ϕi≠ϕi+1≠ϕi+2 и ψi,ψi+1и ψi+2 вычисляются в соответствии с соотношением
где i = 1, 2, 3, ...; - местное магнитное поле Земли,
- местное магнитное поле Земли, магнитное поле, возмущающее
магнитное поле, возмущающее 
[ ]Т обозначает "транспонирование" матрицы для преобразований координат из NEV системы координат в XYZ систему с помощью углов Эйлера ϕ , θ и ψ.
4. Способ по п.3, отличающийся тем, что дополнительно проверяют условия sin2ψi + cos2ψi = 1, для по крайней мере одного i или одного из его эквивалентов измеряют  и
и  по крайней мере на одной дополнительной глубине скважины li + 3, если (sin2ψi + cos2ψi)≠1, где ϕ1≠ϕi+1≠ϕi+2≠ϕi+3,, вычисляют ψi+3 и выполняют следующий этап проверки.
по крайней мере на одной дополнительной глубине скважины li + 3, если (sin2ψi + cos2ψi)≠1, где ϕ1≠ϕi+1≠ϕi+2≠ϕi+3,, вычисляют ψi+3 и выполняют следующий этап проверки. о
о
| US, патент 4163324, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

