Изобретение относится к геофизике, геодезии и может быть использовано для измерения малых углов наклона блоков земной коры.
Известно устройство для измерения угла наклона, содержащее инерционную массу в виде стального шара, находящегося на гладком основании и фиксированного с боков почти вертикальными предварительно напряженными балочками, на которые наклеены тензодатчики сопротивления [1].
Недостатком данного устройства является низкая разрешающая способность, ограничиваемая чувствительностью тензодатчиков, неидеальностью полировки основания, отклонениями формы инерционной массы от сферической, загрязнениями в месте контакта инерционной массы с основанием.
Наиболее близким по технической сущности к предлагаемому является измерительное устройство для определения углов наклона [2], содержащее корпус, инерционную массу, три механические связи инерционной массы с корпусом, разнесенные в плане на 120o, три электронные схемы, входящие вместе с механическими связями в три преобразователя силы в электрический сигнал, а также вычислительный блок, причем механические связи выполнены в виде металлических струн, включенных каждая в один из трех электронно-механических автогенераторов в качестве резонансного элемента, а каждая электронная схема представляет собой усилитель с отрицательным выходным сопротивлением как активный элемент автогенератора.
В этом устройстве частота электрических колебаний каждого автогенератора определяется резонансной частотой механических колебаний входящей в его состав струны, а эта частота зависит от силы натяжения струны; вычислительный блок определяет разности частот колебаний трех автогенераторов и по этим разностям вычисляет величину наклона корпуса устройства.
Однако данное устройство недостаточно чувствительно и стабильно и имеет специфическую погрешность из-за взаимного влияния колебаний трех механических связей (струн), для уменьшения которого приходится увеличивать инерционную массу (т.е. вес и габариты устройства).
Целью изобретения является повышение точности за счет повышения чувствительности (разрешающей способности) устройства.
Сущность изобретения состоит в том, что в измерительном устройстве, содержащем корпус, инерционную массу, три механические связи инерционной массы с корпусом, разнесенные в плане на 120o, три электронные схемы, входящие вместе с механическими связями в три преобразователя силы в электрический сигнал, а также вычислительный блок, каждая механическая связь выполнена в виде опоры для инерционной массы, размещена на основании корпуса под острым углом к вертикальной оси симметрии устройства и в нее введен фотоупругий элемент пьезооптического преобразователя силы в интенсивность света, содержащего также источник света, поляризатор, анализатор и фазовые пластины, а каждая электронная схема выполнена в виде фотоприемника, установленного на выходе преобразователя силы в интенсивность света, и усилителя, подключенного к выходу фотоприемника.
Технический эффект предлагаемого изобретения состоит в
1) повышении разрешающей способности (чувствительности) измерительного устройства;
2) повышение стабильности его показаний;
3) уменьшение требуемой инерционной массы.
Первое по сравнению с устройствами, использующими тензорезисторы (например, [1]), следует из [3], где показано, что чувствительность пьезооптических измерительных преобразователей на три порядка выше, чем у лучших тензорезистивных. По сравнению со струнными измерительными преобразователями, например [2], преимущество пьезооптических по чувствительности показано в Приложении 1.
Второе по отношению к прототипу [2] обусловлено тем, что нестабильность струнных измерительных преобразователей происходит из наличия в них напряженных подвижных частей - вращаемых (для настройки) винтов втулочных соединений, что противоречит рекомендациям [4] (с.290-291) по обеспечению стабильности закрепления струн и стабильности измерений.
Второе по отношению к [1] обусловлено тем, что в предлагаемом устройстве инерционная масса не катится по основанию, чем исключено присущее устройству [1] влияние на процесс начала качения неидеальности полировки основания и стального шара, загрязнений в месте их контакта, влажности.
Третье по отношению к [1] обусловлено тем, что силовое воздействие на упругие балочки и тензорезисторы в [1] составляет лишь малую долю веса стального шара (инерционной массы), поскольку основная часть веса (почти весь) приходится на основание устройства. В предлагаемом устройстве весь вес инерционного шара воздействует на измерительные пьезооптические преобразователи, лишь перераспределением между ними при изменении наклона. Поэтому даже при равных чувствительностях преобразователей силы в электрический сигнал в устройстве [1] и в предлагаемом устройстве в последнем требуется меньшая инерционная масса, а учитывая превосходство пьезооптических преобразователей перед тензорезистивными по чувствительности на три порядка [3] следует заключить, что требуемые инерционные массы различаются тоже на несколько порядков.
Третье по отношению к [2] обусловлено тем, что в устройстве [2] величина инерционной массы принципиально ограничена снизу требованием развязки колебаний трех механических связей (струн) от взаимного влияния именно достаточно большой инерционной массой. В предлагаемой устройстве никаких принципиальных ограничений снизу на величину инерционной массы нет, ее величина определяется лишь чувствительностью пьезооптического преобразователя и требуемой разрешающей способностью измерительного устройства. Исходя из того, что при равных инерционных массах разрешающая способность предлагаемого устройства выше (см. Приложение), следует заключить, что при равных разрешающих способностях инерционная масса в предлагаемом устройстве требуется гораздо меньшая, чем в [2].
Достижение показанного технического результата обеспечивается всей совокупностью существенных признаков.
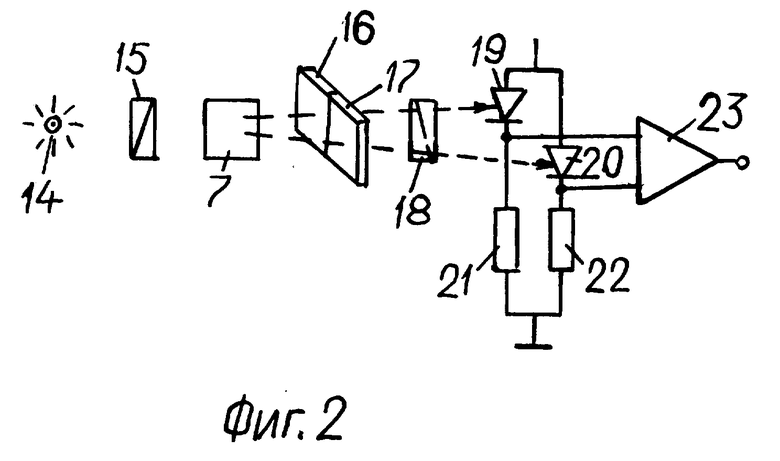
На фиг.1 приведена конструкция предлагаемого измерительного устройства, где а - вид сбоку на разрезе конструкции по A-A; б - вид сверху на конструкцию при снятой крышке корпуса и удаленной из корпуса инерционной массе; на фиг.2 - структура пьезооптического преобразователя и электронной схемы.
Измерительное устройство содержит (фиг.1) корпус 1 с крышкой 2, инерционную массу 3, например, в форме шара, три механические связи 4,5,6 инерционной массы с корпусом, выполненные в виде опор для инерционной массы, укрепленных на основании корпуса под острым углом ϕo к вертикальной оси симметрии устройства и разнесенных в плане на 120o, с введенным в каждую опору фотоупругим элементом 7, 8, 9 пьезооптического преобразователя силы в интенсивность света 10, 11, 12, соответственно, и три электронные схемы, выполненные как фотоприемник с усилителем, которые могут быть конструктивно совмещены с пьезооптическими преобразователями 10, 11, 12, а также вычислительный блок 13. При этом каждый пьезооптический преобразователь включает в себя (фиг.2), кроме фотоупругого элемента (7 в преобразователе 10, 8 в преобразователе 11, 9 в преобразователе 12) источник света 14, поляризатор 15, фазовые пластины 16, 17, анализатор 18, а каждая электронная схема состоит из фотоприемника (например, фотодиодного дифференциального на фотодиодах 19, 20 с резисторными нагрузками 21, 22), установленного на выходе преобразователя силы в интенсивность света, и усилителя (например, дифференциального) 23, подключенного к выходу фотоприемника.
Измерительное устройство работает следующим образом.
В отсутствие наклона корпуса 1, а значит и вертикальной оси симметрии устройства сила веса инерционной массы 3 распределяется поровну между механическими связями (опорами) 4, 5, 6 и их фотоупругими элементами 7, 8, 9, поэтому при идентичности характеристик преобразования всех трех преобразователей 10, 11, 12 и электронных схем напряжения на выходах электронных схем равны и вычислительный блок 13 определяет наклон, равный нулю.
При наличии наклона вертикальной оси симметрии измерительного устройства относительно гравитационной вертикали на угол β сила веса инерционной массы 3 распределяется между опорами 4, 5, 6 неравномерно, силовые воздействия на фотоупругие элементы 7, 8, 9 неодинаковы и зависят от угла наклона β и азимутального угла γ расположения плоскости наклона, поэтому выходные напряжения U1, U2, U3 трех электронных схем различны и зависят от углов α, β, γ.
При этом вычислительный блок 13, выполняя математические операции над напряжениями U1, U2, U3, вычисляет углы β и γ. Описание математических операций, реализуемых вычислительным блоком, дано в Приложении 2 к заявке. Отметим, что геометрическая несимметрия в расположении опор 4, 5, 6, усложнила бы требуемые математические операции и реализацию вычислительного блока, а уменьшение угла ϕo с его устремлением к нулю снижает чувствительность устройства; оптимальный по чувствительности угол ϕo , близок к 30o.
Пьезооптический преобразователь силы в интенсивность света работает следующим образом [3]. Свет от источника 14, проходя поляризатор 15, становится линейно-поляризованным. Плоскость поляризации света составляет с направлением действующей на кристалл фотоупругого элемента силы угол 45o. Линейно-поляризованный свет можно представить суммой двух синфазных линейно-поляризованных компонент света со взаимно перпендикулярными плоскостями поляризации. Одна из компонент поляризована в плоскости, совпадающей с направлением действующей на фотоупругий элемент силы, а другая поляризована в перпендикулярной силе плоскости. Для этих двух компонент, проходящих через нагруженный силой фотоупругий элемент, будут разные коэффициенты преломления. Таким образом, после прохождения через фотоупругий элемент фазы компонент будут различны. Результирующий свет на выходе из фотоупругого элемента в зависимости от разности фаз компонент света может иметь эллиптическую поляризацию, линейную поляризацию с плоскостью поляризации, перпендикулярной первоначальной, и т.д. вплоть до линейно-поляризованного в той же плоскости, что и входящий в элемент свет (при разности фаз 360o, соответствующей относительному сдвигу компонент на длину волны света). Выходящий из фотоупругого элемента свет разделяется на два луча, каждый из которых пропускает через свою четвертьволновую пластинку (16, 17), сдвигающую у одного луча фазу компонент света на угол +45o, а у другого луча фазу компонент света на -45o.
Далее два луча света падают на анализатор 18, представляющий собой пластинку, поляризующую свет в плоскости, перпендикулярной плоскости линейно-поляризованного света, входящего в упругий элемент. После прохождения анализатора каждый из двух световых лучей экспонируются на свой фотодиод. При изменении действующей на фотоупругий элемент силы меняется интенсивность света выходящих из анализатора лучей, причем если интенсивность светового потока одного луча возрастает, то у другого уменьшается. Это происходит в результате применения четвертьволновых пластинок.
Таким образом, в оптической системе, использующей фотоупругий элемент как чувствительный, световой луч (предварительно линейно поляризованный) испытывает фазовую модуляцию, проходя через фотоупругий элемент, а с помощью системы поляризатор-четвертьволновые пластинки - анализатор фазовая модуляция преобразуется в амплитудную модуляцию света.
В электронной схеме фотоприемник преобразует свет в электрический ток, который создает падение напряжения на последовательно включенной резисторе, преобразуя амплитудно-модулированный свет в переменное электрическое напряжение. Усилитель развязывает высокоомный фотоприемник от последующих устройств обработки сигнала. Дифференциальное выполнение фотоприемника и усилителя позволяет снизить дрейфы пьезооптического преобразователя и электронной схемы, а также электромагнитные помехи и вдвое увеличить коэффициент преобразования силы в электрическое напряжение.
Приложение 1. Сравнение разрешающих способностей струнного и пьезооптического наклономеров.
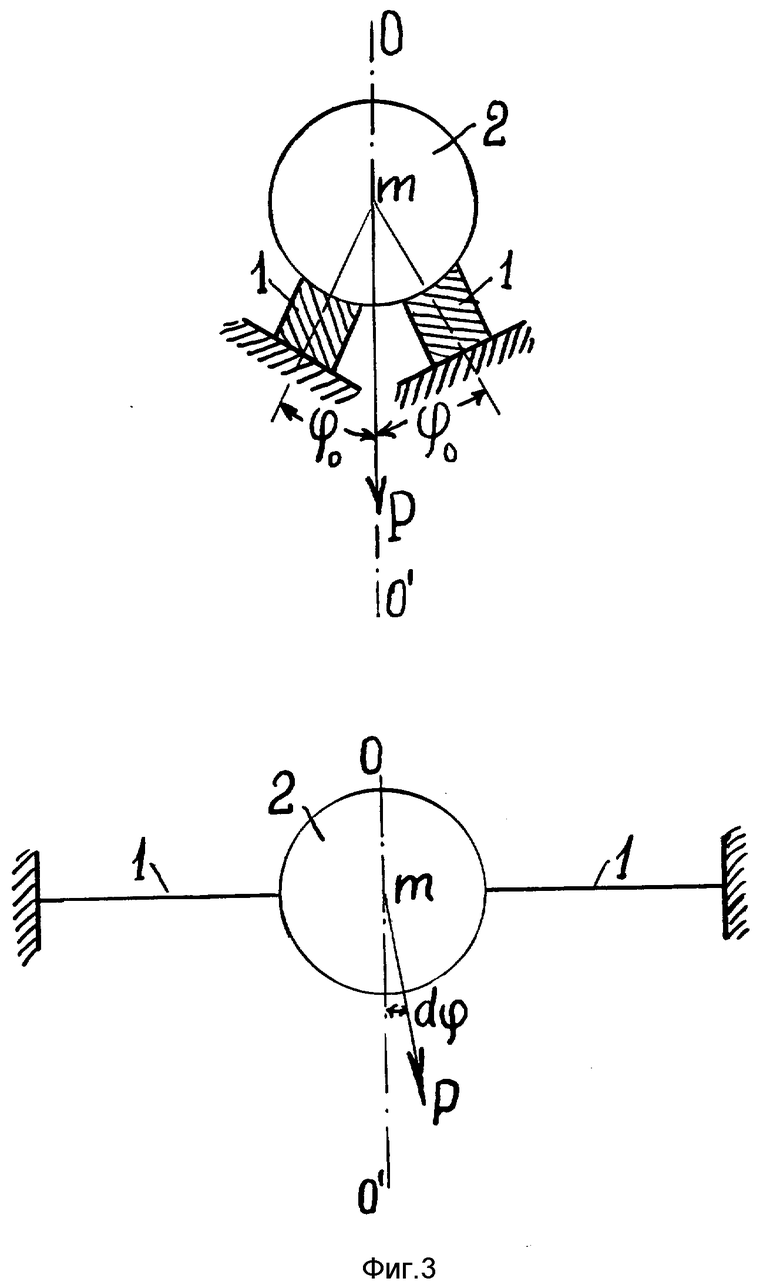
Для простоты сравнивают наклономеры, измеряющие изменение угла наклона в одной плоскости. Для наклономера с чувствительными элементами из фотоупругого материала рассматривают конструкцию по схеме, представленной на фиг.3, где 1 - чувствительные элементы, 2 - инерционная масса в форме шара, OO' - вертикальная ось симметрии наклономера. Масса m установлена на двух чувствительных элементах так, что оси, соединяющие центр массы m с центрами чувствительных элементов, расположены под углами ϕo = 30o к вертикальной оси OO'.
Если ось OO' совпадает с гравитационной вертикалью (направлением действия силы тяжести P), то на каждый элемент 1 действует сила F0, удовлетворяющая следующему соотношению
Fo•cosϕo+Fo•cosϕo= P
или
Fo= P/2cosϕo= mg/2cosϕo.
Когда в плоскости рисунка угол между осью OO' и P составляет dϕ, то соответственно на один чувствительный элемент действует сила F0 + dF, а на другой F0 - dF. Уравнение равновесия есть
(Fo+dF)cos(ϕo-dϕ)+(Fo-dF)cos(ϕo+dϕ) = P.
Раскладывая представленные в равенстве функции в ряд до второго порядка малости, получаем соотношение между приращением силы dF и углом наклона прибора dϕ:
Fo•cosϕo•dϕ2= 2dF•sinϕodϕ
при dϕ ≠ 0
dF = (P/4sinϕo)dϕ (1)
Приращение силы dF вызывает изменение нормального механического напряжения в кристалле чувствительного элемента:
dσ = dF/Sк (2)
где Sk - площадь поперечного сечения чувствительного элемента.
Зная модуль Юнга Ek кристалла, можно определить одноосную деформацию ε кристалла чувствительного элемента, вызванного изменением напряжения dσ
ε = dσ/Eк (3)
Подставив в (3) равенство (2), а затем (1), и решив относительно dϕ, имеет
dϕ = 4ε•Sк•Eк•sinϕo/P = 4ε•Sк•Eк•sinϕo/mg
В настоящее время достигнуто разрешение по деформации ε фотоупругого элемента с соответствующей электронной оснасткой величиной εmin~ 10-11 относительных единиц деформации [1].
Реально используются кристаллы сечением примерно 3х3 мм2 или Sk ≈ 10-5м2. Модуль Юнга для кристалла фосфида галия Ek = 1,4 • 1011 Па [2]. Массу m примем равной 1 кг или P = mg ≈ 10 н.
Тогда
Рассмотрим схему конструкции наклономера на фиг.3, где чувствительными элементами являются натянутые струны.
Масса m (2) подвешена на двух натянутых струнах 1, каждая из которых имеет длину L. Начальная сила натяжения порядка F0 = 10 mg - выбирается из соображения того, что она должна быть достаточной, чтобы струны были натянуты почти перпендикулярно оси прибора OO'.
Если вертикаль прибора OO' совпадает с гравитационной вертикалью (т.е. P и OO' совпадают), то обе струны натянуты одинаково с силой F0 10P = 10mg.
Резонансная частота колебания струны, натянутой с силой F согласно [3] есть
где
ρ - плотность материала струны; Sc - площадь сечения струны; L - длина струны.
Если ось прибора OO' не совпадает с гравитационной вертикалью P, то сила напряжения одной струны уменьшится, а другой увеличится на величину dF = P • dϕ , где dϕ угол между осью OO' и P.
Соответственно частота колебаний струн изменяется на величину
Резонансная система с вынужденными колебаниями имеет разрешение по частоте, оцениваемое шириной dν резонансной кривой на высоте 0,7 от максимального отклика. Ширина dν этой кривой оценивается добротностью колебательной системы Q [3, 4].
(dν/ν) = Q-1= dF/Fo= dF/10 (4)
Добротность механической колебательной системы, состоящей из пружины с жестко зажатыми концами, оценивается как Q ≈ 102 - 103 [4].
В данном случае только один конец каждой струны зажат жестко. Струны должны колебаться квазинезависимо, поэтому не следует рассматривать схему наклономера как осциллятор массы M на пружинах. Кроме того, струнный резонатор является задающим частоту элементов элементом генератора. Учитывая потери в электрических цепях, должны оценить максимально возможную добротность менее 102.
Итак, спустя Q = 102. Подставляя в (4) выражение dF = P • dϕ, вычислим минимальный угол, измеряемый данным типом наклономера при F0 = 10P:
dϕ ~ Fo/P•Q ≈ 10/10-2= 10-1 (радиан)
Таким образом при одной и той же массе m = 1 кг разрешение наклономера с фотоупругими чувствительными элементами на пять порядков выше, чем разрешение наклономера со струнными резонаторными чувствительными элементами.
Приложение 2. Расчетные формулы, реализуемые вычислительным блоком.
Опоры 4, 5, 6 располагаются на окружности, являющейся пересечением сферы и конуса с вершиной в центре шара и углом 30o между вертикалью и образующей конической поверхности. Сила, действующая вдоль оси фотоупругого элемента (опорного кристалла) есть
F = Mg/3•cosϕ,
где g - ускорение свободного падения; ϕ - угол между прямой, соединяющий центр шара и точку опоры, и вертикалью.
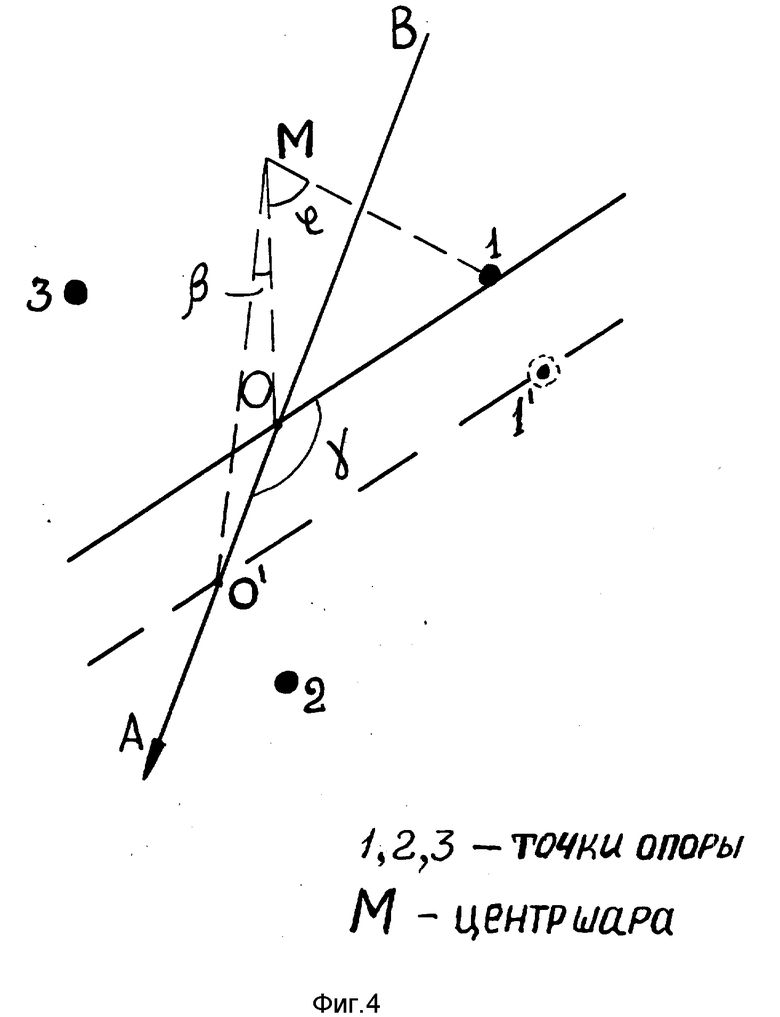
Углы для трех опор наклономера при установлении наклономера строго по вертикали должны быть равны 30o или π/6. При изменении наклона исследуемого объекта изменится угол ϕ. Пусть исследуемый объект отклонился от вертикали на угол β. Выберем одну из опор, присвоив ей номер 1. Проходящую через эту опору и центр шара вертикальную плоскость в начальном состоянии наклономера будем считать базовой. Отклонение от вертикали на угол β фиг.4 происходит в вертикальной плоскости, необязательно совпадающей с базовой. Угол между базовой плоскостью и вертикальной плоскостью, в которой произошло отклонение от вертикали, обозначим γ азимутальный угол. Углы β и γ определяют в пространстве изменение наклона исследуемого объекта. Величина β ≪ 1, 0 < γ < 2π. На фиг. 4 в плоскости, положение которой определяется точками опоры шара инерционной массы M, изображены начальное положение проекции вертикали, опущенной из центра шара, (точка O) и та же проекция после изменения наклона исследуемого объекта (точка O'). След базовой вертикальной плоскости обозначен прямой 1O. Поскольку угол β очень мал, то след новой вертикальной плоскости, проходящей через центр шара и опору 1, будет параллелен прямой 1O. След новой вертикальной плоскости, проходящей через первую опору, обозначим 1'O'. Аналогично следы вертикальных плоскостей, проходящих через вторую опору, обозначены соответственно 2 O и 2' O'. След вертикальной плоскости, проходящей через центр шара, старую и новую проекции вертикали на плоскость трех опор, обозначен прямой AB. Угол γ между прямыми 1O и AB отсчитывается для определенности по часовой стрелке, если проекция новой вертикали находится на отрезке AO, то γ = 10A, если проекция новой вертикали находится на отрезке OB, то γ = 10B. При изменении наклона исследуемого объекта углы ϕ для каждой опоры изменяется, величины их изменения Δϕ1 Δϕ2 Δϕ3, , выражаемые через тригонометрические функции углов β и γ, , причем так как β ≪ 1 тригонометрические функции этого угла заменяются первым числом разложения в ряд соответствующей тригонометрической функции (sinβ ≈ β).
Путем несложных тригонометрических выкладок можно выразить искомые углы β и γ через Δϕ1 Δϕ2 Δϕ3.
Результаты этих расчетов нетрудно получить современными электронными средствами (с помощью аналоговых или цифровых устройств), т.е. на выходе наклономера можно получить значения γ и β. .
Рассмотрим изменение силы реакции опоры и фотоупругого элемента при изменении наклона исследуемого объекта.
(F+ΔF)(cosϕo-sinϕo•Δϕ) = Mg/3
Отсюда
F•cosϕo+ΔF•cosϕo-F•sinϕo•Δϕ = Mg/3
В силу равенства F • cosϕo = Mg/3, имеет
ΔF = F•tgϕoΔϕ (B)
Фотоупругий элемент 7 (8 и 9) может представлять собой небольшой кристалл фосфида галлия высотой и шириной 5•5 и толщиной 3 мм. Опора установлена таким образом, что сила реакции F направлена по ее высоте. Фотоупругий элемент (кристалл) будет испытывать одноосную деформацию:
ε = (Fo+ΔF)/SE (Г)
где Fo= (Mgcosϕo)/3 - начальное значение силы реакции; S - площадь сечения фотоупругого кристалла; E - его модуль Юнга.
Эффект двойного лучепреломления может быть обусловлен либо строением кристаллической решетки прозрачного материала, либо внешним воздействием (магнитное и электрическое поля, механическое воздействие). В частности, при механическом воздействии коэффициент преломления зависит от направления распространения света и от его поляризации. Функция, описывающая зависимость коэффициента преломления материала от направления распространения света, называют индикатрисой. Для оптически изотропного тела индикатриса является сферой.
В общем случае трехмерной анизотропии индикатриса является поверхностью четвертого порядка.
Для случая одноосной анизотропии, к коему относится случай одноосного нагружения кристалла фосфида галлия, индикатриса распадается на две поверхности второго порядка: сферу и эллипсоид.
Сферическая индикатриса определяет условие распространения так называемого обыкновенного светового луча, т.е. поляризованного перпендикулярно действующей силе. Эллиптическая индикатриса определяет условие распространения так называемого необыкновенного луча света, т.е. света, поляризованного параллельно действующей силе.
Изменение индикатрисы для света, поляризованного вдоль действующей силы, описывается формулой
Δ(1/n2) = [p12-(p11+p12)μ]•ε,
где n - показатель преломления фотоупругого кристалла в данной формуле для света, поляризованного вдоль оси действующей силы; p11 и p12 - упругооптические константы кристалла; μ - коэффициент Пуасона кристалла.
Изменение индикатрисы света, поляризованного перпендикулярно направлению действующей силы, будет
Δ(1/n2) = (p11-2μp12)•ε.
Отсюда разность коэффициентов преломления для света, поляризованного перпендикулярно и для света, поляризованного параллельно направлению действующей силы, будет ,
,
где n0 - показатель преломления кристалла при отсутствии действующей силы.
Две компоненты луча плоскополяризованного света, один из которых поляризован параллельно направлению действующей на кристалл силы, а другой перпендикулярно, нормально падают на оптическую поверхность кристалла с разностью фаз равной нулю друг относительно друга. На выходе из кристалла у этих лучей разность фаз станет
Δα = π•Δx(n-n)/λ = πn
где λ - длина световой волны, Δx - толщина кристалла.
Подставим в (Д) значение ε в виде (Г), тогда при отсутствии наклона исследуемого объекта разность фаз двух плоскополяризованных во взаимно перпендикулярных плоскостях лучей света после прохождения кристалла составит
Кристалл, находящийся между взаимно перекрещенными поляроидными пластинками (поляризатор и анализатор), причем плоскости поляризации каждой из них наклонены под углом 45o к направлению действующей на кристалл силы, по мере изменения действующей силы изменяет разность фаз двух плоскополяризованных компонент света, проходящих через него. На выходе такой оптической системы изменяется интенсивность светового потока по закону
P = (Pmax-Pmin)•sin2(α/2)+Pmin,
где P - интенсивность светового потока на выходе оптической системы; Pmax и Pmin - соответственно максимальная и минимальная интенсивности светового потока.
Интенсивность светового потока представляет собой периодическую функцию. Максимальная производная интенсивности по α, а следовательно и максимальная чувствительность оптической системы, достигается в точках, когда интенсивность светового потока на выходе оптической системы P0 = (Pmax + Pmin)/2. Выбирая кристаллы фосфида галлия для опор наклономера, одновременно выбирается и масса устанавливаемого на опорах шара M таким образом, чтобы при сдвиге фаз Δαo интенсивность проходящего светового потока через оптическую систему будет P0. При изменении наклона исследуемого объекта в формуле (V) появится еще слагаемое
Δα = -π•n
Измеряемая величина Δϕ пропорциональна дополнительному изменению разности фаз Δα и, если масса шара M подобрана правильно, то изменение интенсивности светового потока также пропорционально Δϕ. .
Таким образом, по изменению интенсивности светового потока ΔP, проходящего через оптическую систему из двух взаимно перекрещенных поляроидных пластинок с находящимися между ними кристаллом фосфида галлия, находящегося в одной из опор шаровой массы наклономера, можно определить изменение для каждой из опор, а из них по формулам (А) и (Б) определяется угол наклона и направление вертикальной плоскости, в которой происходит наклон исследуемого объекта.
Источники, принятые во внимание
1. Авторское свидетельство СССР N 187324, кл. G 01 C 9/16, 1966.
2. Европейский патент N 0037626, кл. G 01 C 9/00, 1981 (прототип).
3. Слезингер Г.И. Пьезооптические измерительные преобразователи. Измерительная техника, N 11, 1985, с. 45 - 48.
4. Проектирование датчиков для измерения механических величин. Под ред. Осадчего Е.П. - М.: Машиностроение, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗООПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН | 1996 |
|
RU2109258C1 |
| СПОСОБ ВОЗМУЩЕНИЯ ИОНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2144685C1 |
| Пьезооптический измерительный преобразователь | 1980 |
|
SU939974A1 |
| Пьезооптический измерительный преобразователь | 1989 |
|
SU1672245A1 |
| Пьезооптический акселерометр | 1978 |
|
SU794548A1 |
| АВТОНОМНЫЙ СЕЙСМОПРИЕМНИК С ЦИФРОВОЙ РЕГИСТРАЦИЕЙ СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2400777C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| Фотоупругий измерительный преобразователь | 1989 |
|
SU1649315A1 |
| Преобразователь механических величин | 1982 |
|
SU1041887A1 |
| Пьезооптический измеритель механических величин | 1987 |
|
SU1446496A1 |
Измерительное устройство предназначено для измерения малых углов наклона блоков земной коры и может быть использовано в геофизике и геодезии. Измерительное устройство содержит корпус, инерционную массу, три механические связи инерционной массы с корпусом, разнесенные в плане на 120o, три электронные схемы, входящие вместе с механическими связями в три преобразователя силы в электрический сигнал и вычислительный блок. Каждая механическая связь выполнена в виде опоры для инерционной массы, размещена на основании корпуса под острым углом к вертикальной оси симметрии устройства и в нее введен фотоупругий элемент пьезооптического преобразователя силы в интенсивность света, содержащего также источник света, поляризатор, анализатор и фазовые пластинки. Электронная схема выполнена в виде фотоприемника, установленного на выходе преобразователя силы в интенсивность света, и усилителя. Изобретением достигается повышение чувствительности устройства. 4 ил.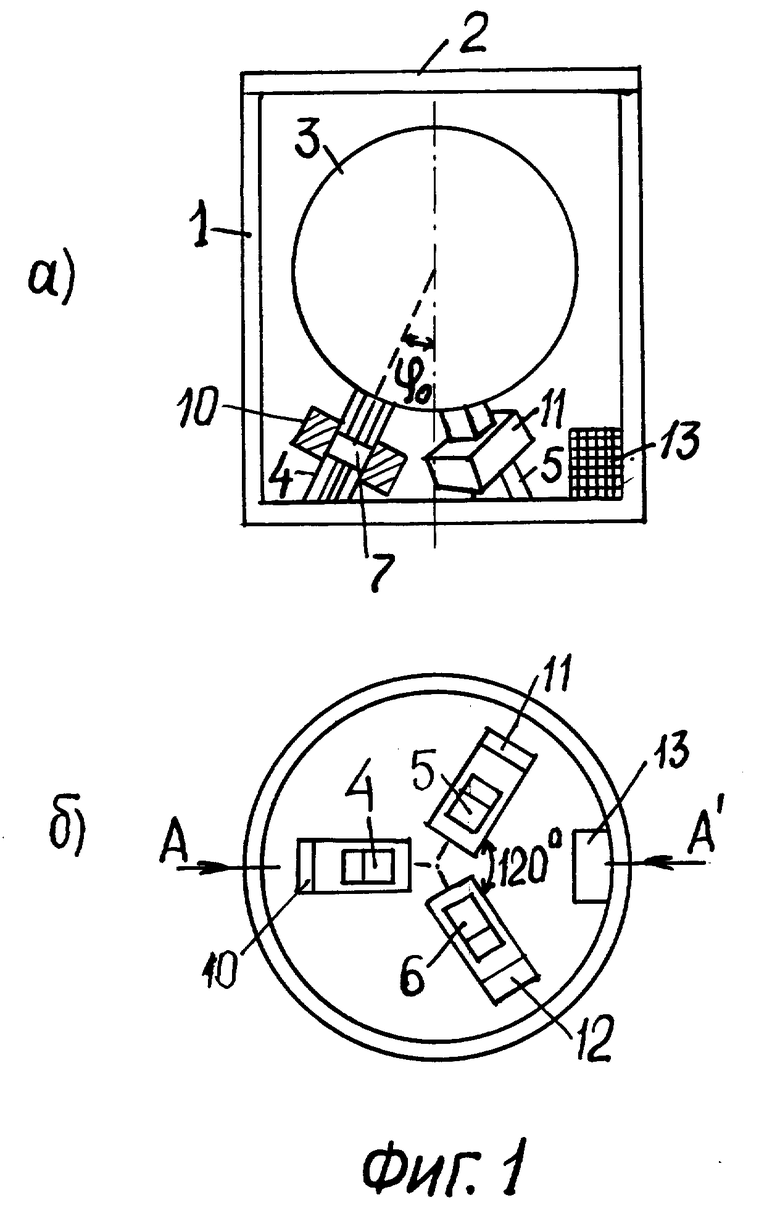
Измерительное устройство, содержащее корпус, инерционную массу, три механические связи инерционной массы с корпусом, разнесенные в плане на 120o, три электронные схемы, входящие вместе с механическими связями в три преобразователя силы в электрический сигнал и вычислительный блок, при этом каждая электронная схема содержит усилитель, отличающееся тем, что каждая механическая связь выполнена в виде опоры для инерционной массы, размещена на основании корпуса под острым углом к вертикальной оси симметрии устройства и в нее введен пьезооптический преобразователь силы в интенсивность света, содержащий фотоупругий элемент, источник света, поляризатор и фазовые пластинки, а каждая электронная схема содержит фотоприемник, установленный на выходе преобразователя силы в интенсивность света, причем усилитель подключен к выходу фотоприемника.
| SU, авторское свидетельство, 187324, G 01 C 9/16, 1966 | |||
| EP, заявка, 0037626, G 01 C 9/00, 1981. |
