Изобретение относится к сейсмологии, а точнее к аппаратуре для сейсмических исследований, и может быть использовано при создании систем регистрации сейсмических данных.
Известен сейсмоприемник, содержащий последовательно соединенные сейсмический датчик, блок фильтрации, аналого-цифровой преобразователь, а также блок памяти, контроллер управления, который имеет программу, заключенную в нем, обеспечивающую прием данных с аналого-цифрового преобразователя, запись данных в блок памяти [1].
Недостатком известного устройства является то, что привязка собираемых им данных к астрономическому времени возможна лишь только фиксацией начального момента запуска устройства, т.к. оно не имеет средств для синхронизации с астрономическим временем. При достаточно большом времени (несколько суток или месяцев) непрерывного сбора данных отклонение внутренних часов устройства от астрономического времени может достигать минут, что совершенно недопустимо при сейсмологических наблюдениях.
Наиболее близким техническим решением к предлагаемому изобретению и принятым за прототип является автономный сейсмоприемник с цифровой регистрацией сейсмических данных, содержащий последовательно соединенные сейсмический датчик, блок фильтрации, аналого-цифровой преобразователь, а также блок энергонезависимой памяти, канал передачи данных, навигатор глобального позиционирования, контроллер управления, вход данных которого соединен с выходом данных аналого-цифрового преобразователя, выход записи-чтения данных и выход управления памятью соединены с входом-выходом и управляющим входом соответственно блока энергонезависимой памяти, а выход передачи данных соединен с входом канала передачи данных, выход которого является выходом сейсмоприемника, причем контроллер управления имеет программу, заключенную в нем, обеспечивающую прием данных с аналого-цифрового преобразователя, запись и чтение данных из блока энергонезависимой памяти и передачу данных через канал передачи данных на выход устройства [2].
Недостатком известного технического решения является сложность привязки сейсмических данных к астрономическому времени, т.к. хотя импульс секундной метки навигатора глобального позиционирования сам по себе точно синхронизирован с астрономическим временем, но различить к какой секунде, какой из импульсов относится затруднительно, не имея сообщения навигатора об этом. Зафиксировать же в полевых условиях точную секунду астрономического времени начала регистрации данных сейсмиприемником сложно или для этого нужно иметь дополнительные специальные средства.
Целью предлагаемого изобретения является упрощение привязки сейсмических данных к астрономическому времени.
Поставленная цель достигается тем, что автономный сейсмоприемник с цифровой регистрацией сейсмических данных, содержащий последовательно соединенные сейсмический датчик, блок фильтрации, аналого-цифровой преобразователь, а также блок энергонезависимой памяти, навигатор глобального позиционирования, контроллер управления, вход данных которого соединен с выходом данных аналого-цифрового преобразователя, а выход данных соединен с входом блока энергонезависимой памяти, причем контроллер управления имеет программу, заключенную в нем, обеспечивающую прием данных с аналого-цифрового преобразователя и запись данных в блок памяти, дополнительно содержит тактовый генератор, соединенный с тактовым входом контроллера управления, выход синхронизации которого соединен с входом синхронизации аналого-цифрового преобразователя, блок согласования логических уровней, вход которого соединен с выходом данных навигатора глобального позиционирования, формирователь минутной метки, вход данных которого соединен с выходом блока согласования логических уровней, вход синхронизации соединен с выходом секундной метки навигатора глобального позиционирования, а выход соединен с входом метки времени контроллера управления, программа, заключенная в котором, обеспечивает запись состояния входа метки времени контроллера управления в блок энергонезависимой памяти синхронно с данными аналого-цифрового преобразователя с частотой, кратной частоте тактового генератора.
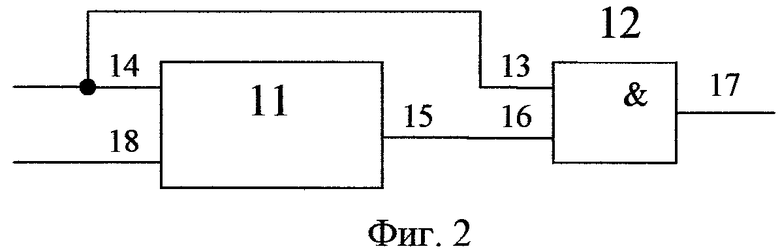
Кроме того, формирователь минутной метки состоит из контроллера последовательных данных и логического элемента И, первый вход которого является входом синхронизации формирователя и соединен с управляющим входом контроллера последовательных данных, управляющий выход которого соединен с вторым входом логического элемента И, выход которого является выходом формирователя, входом данных которого является вход контроллера последовательных данных, который имеет программу, заключенную в нем, обеспечивающую прием значения астрономического времени от навигатора глобального позиционирования и формирование на управляющем выходе разрешающего сигнала, соответствующего первой секунде каждой минуты астрономического времени.
Совокупность существенных признаков предложенного устройства: «тактовый генератор, соединенный с тактовым входом контроллера управления, выход синхронизации которого соединен с входом синхронизации аналого-цифрового преобразователя, блок согласования логических уровней, вход которого соединен с выходом данных навигатора глобального позиционирования, формирователь минутной метки, вход данных которого соединен с выходом блока согласования логических уровней, вход синхронизации соединен с выходом секундной метки навигатора глобального позиционирования, а выход соединен с входом метки времени контроллера управления, программа, заключенная в котором, обеспечивает запись состояния входа метки времени контроллера управления в блок энергонезависимой памяти синхронно с данными аналого-цифрового преобразователя с частотой, кратной частоте тактового генератора» обеспечивает повышение точности привязки накапливаемых сейсмических данных. Это достигается за счет того, что формирователь минутной метки по данным, получаемым от навигатора глобального позиционирования, вырабатывает импульсы, передние фронты которых синхронизированы с началом каждой минуты астрономического времени. Эти импульсы поступают на вход метки времени контроллера управления, являясь для него такими же данными, как и данные, получаемые от аналого-цифрового преобразователя. Значение метки времени вместе с данными аналого-цифрового преобразователя контроллер управления записывает в блок энергонезависимой памяти. При этом контроллер управления не выполняет никаких дополнительных операций по обработке сигнала на своем входе метки времени, что обеспечивает надежность его работы, а следовательно, и всего устройства в целом. Упрощение же привязки накапливаемых сейсмических данных к астрономическому времени по сравнению с известным техническим решением происходит из-за их синхронизации с сигналом точного времени каждую минуту, а зафиксировать момент запуска сейсмоприемника на регистрацию с точностью до минуты гораздо проще, чем до секунды.
Совокупность дополнительных существенных признаков предложенного устройства: «формирователь минутной метки состоит из контроллера последовательных данных и логического элемента И, первый вход которого является входом синхронизации формирователя и соединен с управляющим входом контроллера последовательных данных, управляющий выход которого соединен со вторым входом логического элемента И, выход которого является выходом формирователя, входом данных которого является вход контроллера последовательных данных, который имеет программу, заключенную в нем, обеспечивающую прием значения астрономического времени от навигатора глобального позиционирования и формирование на управляющем выходе разрешающего сигнала, соответствующего первой секунде каждой минуты астрономического времени» - раскрывает реализацию формирователя минутной метки.
На фиг.1 представлена блок-схема автономного сейсмоприемника с цифровой регистрацией сейсмических данных, на фиг.2 - схема формирователя минутной метки, на фиг.3 - алгоритм работы контроллера последовательных данных.
Автономный сейсмоприемник с цифровой регистрацией сейсмических данных содержит сейсмический датчик 1, блок 2 фильтрации, аналого-цифровой преобразователь 3, контроллер 4 управления, блок 5 энергонезависимой памяти, тактовый генератор 6, навигатор 7 глобального позиционирования, блок 8 согласования логических уровней, формирователь 9 минутной метки, канал 10 передачи данных. Преобразователь 3, контроллер 4 и тактовый генератор 6 конструктивно могут быть выполнены в виде единого узла, например микросхемы. Программа, заключенная в контроллере 4, обеспечивает управление работой аналого-цифрового преобразователя 3, прием данных с него с частотой, кратной частоте тактового генератора 6, синхронную запись данных и состояния входа синхронизации контроллера 4 управления в блок 5 энергонезависимой памяти, а также чтение данных из блока 5 энергонезависимой памяти и их передачу на выход устройства через канал 10 передачи данных.
Формирователь 9 минутной метки может состоять из контроллера 11 последовательных данных и логического элемента И 12, первый вход 13 которого является входом синхронизации формирователя и соединен с управляющим входом 14 контроллера 11 последовательных данных, управляющий выход 15 которого соединен с вторым входом 16 логического элемента И 12, выход 17 которого является выходом формирователя, входом данных которого является вход 18 контроллера 11 последовательных данных. Программа, заключенная в контроллере 11, обеспечивает прием значения астрономического времени от навигатора 7 глобального позиционирования и формирование на управляющем выходе 15 разрешающего сигнала, соответствующего первой секунде каждой минуты астрономического времени.
Устройство работает следующим образом.
Сейсмический датчик 1 устанавливается в грунт. Он преобразует параметры колебания грунта (смещение, скорость или ускорение в зависимости от типа датчика) в электрический аналоговый сигнал. Этот сигнал поступает на блок 2 фильтрации, где отфильтровываются его частотные составляющие, выходящие за полосу частот датчика 1. Эти составляющие могут возникать из-за воздействия различного рода внешних влияющих факторов несейсмического характера. Далее отфильтрованный аналоговый сигнал поступает в аналого-цифровой преобразователь 3, где он оцифровывается. Частота оцифровки формируется контроллером 4 управления из частоты тактового генератора 6 путем ее деления и подается на вход синхронизации аналого-цифрового преобразователя 3. Оцифрованное значение величины сейсмического сигнала, в свою очередь, поступает из аналого-цифрового преобразователя 3 на вход данных контроллера 4 управления.
Синхронизация поступающих на контроллер 4 данных с астрономическим временем производится с помощью навигатора 7 глобального позиционирования, который имеет последовательный выход данных и выход секундной метки [3]. Данные, которые выдаются навигатором 7 через последовательный выход, имеют логические уровни в соответствии со стандартом RS-232, поэтому для приема этих данных необходим блок 8 согласования логических уровней.
На выходе секундной метки навигатор 7 выдает каждую секунду импульс, передний фронт которого привязан к началу секунды астрономического времени с точностью ±1 мкс, что вполне достаточно для синхронизации большинства сейсмологических наблюдений. Каждый такой импульс сопровождается сообщением навигатора 7, передаваемым через последовательный выход данных. В этом сообщении содержится, в том числе, и значение астрономического времени, соответствующего текущему импульсу секундной метки.
Сообщение и секундная метка, вырабатываемые навигатором 7, поступают на формирователь 9 минутной метки. В исходном состоянии на выходе формирователя 9 какие-либо импульсы отсутствуют. По сообщению навигатора 7 формирователь 9 определяет момент наступления 59-й секунды каждой минуты и после этого разрешает прохождение на свой выход следующего импульса секундной метки навигатора 7. По завершении пропущенного импульса формирователь 9 снова переходит в исходное состояние. Таким образом на его выходе формируются импульсы, передний фронт которых синхронизирован с началом минут астрономического времени.
С выхода формирователя 9 эти импульсы поступают на вход метки времени контроллера 4. При поступлении на контроллер 4 очередных оцифрованных данных с аналого-цифрового преобразователя 3, он записывает в блок 5 памяти цифровое значение сигнала датчика 1 вместе с логическим значением состояния своего входа метки времени. При этом первые оцифрованные данные, поступившие после начала очередной минуты, будут записаны вместе с признаком «1» (во время импульса минутной метки), а остальные вместе с признаком «0» (по окончании импульса минутной метки). Понятно, что для этого длительность импульсов минутной метки должна быть больше, по крайней мере, одного периода оцифровки сейсмического сигнала. Это условие легко выполняется, т.к. в большинстве сейсмологических задач частота оцифровки превышает 10 Гц, т.е. период оцифровки менее 100 мс, а длительность импульса секундной метки навигатора 7 и, следовательно, импульса на выходе формирователя 9 может быть доведена до 980 мс.
Накопленные в блоке 5 памяти данные могут быть впоследствии считаны контроллером 4 управления и переданы на выход устройства через канал 10 передачи данных.
При их расшифровке первое значение сейсмосигнала, записанное со значением «1» входа метки времени контроллера 4, соответствует началу очередной астрономической минуты. Момент оцифровки остальных данных, поступивших не в момент смены признака с «0» на «1», может быть рассчитан, т.к. частота оцифровки известна и задается, в конечном счете, тактовым генератором 6. Относительная погрешность периода сигнала генератора на самом плохом кварцевом резонаторе не превышает 10-4, т.е. за 60 с ошибка определения времени не может составить более 6 мс, что удовлетворяет большинству сейсмологических задач.
Необходимость выделения именно минутной метки, а не использования секундной метки, непосредственно вырабатываемой навигатором 7, обусловлена тем, что гораздо проще зафиксировать время начала работы устройства с точностью до минуты, чем до секунды. По той же причине упрощается синхронизации системы из нескольких, удаленных на большое расстояние друг от друга, автономных сейсмоприемников. Все это приводит к облегчению эксплуатации устройства.
Навигатор 7 выдает сообщения на свой выход данных в соответствии с одним из протоколов NMEA. Рассмотрим принцип работы формирователя 9 минутной метки на примере протокола RMC [4]. Все байты сообщения являются кодами символов в ASCII кодах. Идентификатором начала сообщения по всем протоколам NMEA, в том числе и RMC, является байт, кодирующий в символ $. Байт, кодирующий значение десятков секунд текущего времени, является 11-м с начала сообщения, не считая идентификатора начала сообщения, а байт, кодирующий значение единиц секунд, - 12-м.
Контроллер 11 последовательных данных работает в соответствии с алгоритмом фиг.3, где А - признак получения идентификатора начала сообщения, С - счетчик принятых от навигатора 7 байт после идентификатора начала сообщения; В - значение принятого от навигатора 7 байта, S - состояние входа синхронизации контроллера 11, М - состояние управляющего выхода контроллера 11.
После включения питания устройства программа контроллера 11 обнуляет свой счетчик байт С и признак получения идентификатора начала сообщения А, а также выставляет логический «0» на управляющем выходе 15 контроллера 11 (М=0). Этот логический «0» поступает на второй вход 16 элемента И 12, обеспечивая установление «0» и на выходе 17 элемента И 12 независимо от состояния его первого входа 13.
После этого программа ожидает прихода байта от навигатора 7 на вход 18 контроллера 11. Получив байт, программа проверяет, не является ли он началом сообщения, т.е. кодом символа $. Если не является, программа проверяет текущее значение переменной А. А=1 означает, что идентификатор начала текущего сообщения был уже получен, и программа должна перейти к поиску и проверке байт, содержащих значение секунд в данном сообщении. Если А=0, то код начала сообщения еще не был получен, и программа возвращается к ожиданию следующего байта от навигатора 7. При получении байта с кодом символа $ программа устанавливает А=1 и возвращается к ожиданию следующих байт от навигатора 7 для выделения из них байт с кодом секунд.
При поступлении байта после того, как был обнаружен идентификатор начала (А=1), программа увеличивает на единицу состояние счетчика байт С и проверяет значение этого счетчика. Если С не равно 11 или 12 (именно в этих по счету байтах находится информация о секундах), программа возвращается к ожиданию следующего байта. Если С=11 (получен байт, содержащий значение десятков секунд), то проверяется не равен ли этот байт коду символа 5, т.к. необходимо выделить сообщение, соответствующее 59-й секунде. Если этот байт В не равен 5, то уже ясно, что данное сообщение не относится к 59-й секунде, поэтому программа прекращает поиск байт, содержащих секунды, сбрасывает счетчик (С=0) и признак получения идентификатора начала сообщения (А=0) и оставляет М=0, и на управляющем выходе 15 контроллера 11 остается низкий логический уровень, не допускающий прохождения каких-либо сигналов на выход 17 элемента И 12. Если проверяемый байт В=5, то программа возвращается к ожиданию следующего байта для дальнейших проверок.
При получении следующего байта будет выполнено условие С=12. Это означает, что в данном байте закодировано значение единиц секунд. Если В не равен 9, то данное сообщение не относится к 59-й секунде, поэтому программа сбрасывает счетчик (С=0) и признак получения идентификатора начала сообщения (А=0) и оставляет М=0, и на управляющем выходе 15 контроллера 11 остается низкий логический уровень, не допускающий прохождения каких-либо сигналов на выход 17 элемента И 12. Ситуация, когда при проверке 12-го байта оказывается В=9, означает, что данное сообщение относится к 59-й секунде минуты, и необходимо разрешить прохождение на выход формирователя 9 импульса секундной метки с навигатора 7.
Для этого программа проверяет состояние управляющего входа 14 контроллера 11, а все оставшиеся до конца сообщения байты навигатора 7 контроллером 11 игнорируются. Т.к. неизвестно, закончился ли в момент обнаружения 59-й секунды импульс секундной метки, соответствующий этой секунде, то программа ожидает, когда на управляющем входе 14 контроллера 11 последовательных данных установится низкий логический уровень S=0. Как только выполнение этого условия будет обнаружено, программа устанавливает М=1, и управляющий выход 15 контроллера 11 переходит в состояние «1». В это же состояние перейдет и второй вход 16 элемента И 12, разрешая тем самым прохождение импульса секундной метки, соответствующего первой секунде минуты, от навигатора 7 через первый вход 13 элемента И 12.
Программа контроллера 11 последовательно дожидается начала импульса секундной метки (S=l) и его окончания (S=0), после чего переходит в исходное состояние, запрещая прохождение на выход формирователя 9 минутной метки всех остальных импульсов, пока не будет обнаружено сообщение 59-й секунды следующей минуты.
Таким образом, выполнение формирователя 9 минутной метки на контроллере 11 последовательных данных с соответствующей программой и элементе И 12 обеспечивает реализацию его функций в автономном сейсмоприемнике с цифровой регистрацией сейсмических данных. Использование в сейсмоприемнике формирователя 9 минутной метки позволяет обеспечить повышение точности привязки накапливаемых сейсмических данных к астрономическому времени по сравнению с известным техническим решением из-за проведения синхронизации с сигналом точного времени каждую минуту, а не только при запуске устройства. При этом контроллер 4 управления не выполняет никаких дополнительных операций по обработке сигнала на своем входе метки времени, что обеспечивает надежность его работы, а следовательно, и всего устройства в целом.
Предложенное устройство было разработано для проведения прецизионных сейсмологических измерений в рамках реализации проекта РФФИ 08-05-1204-офи «Создание нового метода определения устойчивости зданий, сооружений и природных объектов к многократным сейсмическим воздействиям 2008-2009» и использовалось при регистрации карьерных взрывов на территории центральной и северо-западной частей России. Проведенные работы подтвердили достижение в предложенной совокупности существенных признаков поставленной цели изобретения.
Список литературы
1. Патент РФ №2265867, кл. G01V 1/00, от 29.12.2003 г.
2. Патент РФ №2323455, кл. G01V 1/00, от 22.04.2003 г., фиг.1А.
3. GARMENT. GPS 25 LP series GPS sensor boards GPS25-LVC, GPS25-LVS, GPS25-HVS. Technical Specification, p.11.
4. Там же, p.24.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
| Формирователь сигналов астрономического времени для автономных цифровых сейсмометров | 2023 |
|
RU2805775C1 |
| Формирователь сигналов астрономического времени для автономных цифровых сейсмометров | 2024 |
|
RU2824343C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |
| Устройство, способ и машиночитаемый носитель для автономной регистрации сейсмических данных | 2024 |
|
RU2836136C1 |
| МНОГОКАНАЛЬНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2244945C1 |
| ЦИФРОВОЙ СЕЙСМОМЕТР | 2022 |
|
RU2799344C1 |
| УСТРОЙСТВО И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ, СИСТЕМА СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2004 |
|
RU2450255C2 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И КОРРЕКЦИИ ТАКТОВОЙ ЧАСТОТЫ АВТОНОМНОГО РЕГИСТРАТОРА СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2008 |
|
RU2366981C1 |

Изобретение относится к приемникам сейсмических сигналов и может быть использовано при создании систем регистрации сейсмических данных. Сущность: устройство содержит сейсмический датчик, блок фильтрации, аналого-цифровой преобразователь, блок энергонезависимой памяти, канал передачи данных, навигатор глобального позиционирования, контроллер управления. Дополнительно в устройство введены тактовый генератор, блок согласования логических уровней, формирователь минутной метки. Заключенная в контроллер управления программа обеспечивает прием данных с аналого-цифрового преобразователя, запись и чтение данных из блока энергонезависимой памяти, передачу данных через канал передачи данных на выход устройства. Помимо этого, указанная программа обеспечивает запись состояния входа метки времени контроллера управления в блок энергонезависимой памяти синхронно с данными аналого-цифрового преобразователя с частотой, кратной частоте тактового генератора. Технический результат: упрощение привязки сейсмических данных к астрономическому времени. 1 з.п. ф-лы, 3 ил.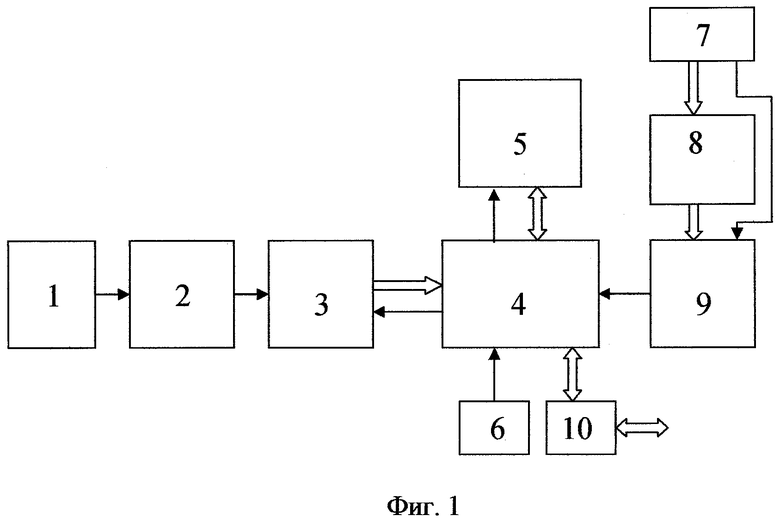
1. Автономный сейсмоприемник с цифровой регистрацией сейсмических данных, содержащий последовательно соединенные сейсмический датчик, блок фильтрации, аналого-цифровой преобразователь, а также блок энергонезависимой памяти, канал передачи данных, навигатор глобального позиционирования, контроллер управления, вход данных которого соединен с выходом данных аналого-цифрового преобразователя, выход записи-чтения данных и выход управления памятью соединены соответственно с входом-выходом и управляющим входом блока энергонезависимой памяти, а выход передачи данных соединен с входом канала передачи данных, выход которого является выходом сейсмоприемника, причем контроллер управления имеет программу, заключенную в нем, обеспечивающую прием данных с аналого-цифрового преобразователя, запись и чтение данных из блока энергонезависимой памяти и передачу данных через канал передачи данных на выход устройства, отличающийся тем, что он дополнительно содержит тактовый генератор, соединенный с тактовым входом контроллера управления, выход синхронизации которого соединен с входом синхронизации аналого-цифрового преобразователя, блок согласования логических уровней, вход которого соединен с выходом данных навигатора глобального позиционирования, формирователь минутной метки, вход данных которого соединен с выходом блока согласования логических уровней, вход синхронизации соединен с выходом секундной метки навигатора глобального позиционирования, а выход соединен с входом метки времени контроллера управления, программа, заключенная в котором, обеспечивает запись состояния входа метки времени контроллера управления в блок энергонезависимой памяти синхронно с данными аналого-цифрового преобразователя с частотой, кратной частоте тактового генератора.
2. Автономный сейсмоприемник по п.1, отличающийся тем, что формирователь минутной метки состоит из контроллера последовательных данных и логического элемента И, первый вход которого является входом синхронизации формирователя и соединен с управляющим входом контроллера последовательных данных, управляющий выход которого соединен с вторым входом логического элемента И, выход которого является выходом формирователя, входом данных которого является вход контроллера последовательных данных, который имеет программу, заключенную в нем, обеспечивающую прием значения астрономического времени от навигатора глобального позиционирования и формирование на управляющем выходе разрешающего сигнала, соответствующего первой секунде каждой минуты астрономического времени.
| ПОЛЕВАЯ АППАРАТУРА И СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА | 2003 |
|
RU2265867C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2323455C2 |
| Инженерно-сейсмический светолучевой осциллограф | 1983 |
|
SU1190326A1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| Цифровая геоакустическая станция | 1974 |
|
SU559204A1 |

