Изобретение относится к авиационной технике, к управлению аэродинамическими поверхностями самолета, в частности к управлению стабилизатором.
В качестве прототипа рассматривается электродистанционная система управления стабилизатором самолета Ту-154 (см. Руководство по эксплуатации самолета Ту-154Б, кн. 5, ч. 1, гл. 10, Изв. разработчика, М., 1983).
Известная система управления стабилизатором содержит двухканальный привод и два канала управления, каждый из которых содержит источники питания постоянного и переменного тока, концевой выключатель, кинематически соединенный с рукояткой управления закрылками, переставной переключатель ручного режима управления с предохранительным колпачком, кинематически соединенный с концевым выключателем, два задающих датчика положения стабилизатора, восемь реле управления, три контактора, коробку защиты электродвигателя привода, четыре диода, пять датчиков положения стабилизатора, три датчика положения закрылков, три электроцепи управления, соединенные с блоком управления закрылками.
Управление стабилизатором на самолете Ту-154 производится на взлете, на посадке и при уходе на второй круг.
Основной режим управления стабилизатором совмещен с управлением закрылками и осуществляется от рукоятки управления закрылками. В зависимости от положения рукоятки управления закрылками, а также от положения задатчика стабилизатора стабилизатор устанавливается в положение, согласованное с закрылками.
Режим ручного управления стабилизатором осуществляется от переключателя ручного управления независимо от положения закрылков. Переход на режим ручного управления стабилизатором осуществляется поднятием предохранительного колпачка переключателя ручного управления.
В процессе длительной эксплуатации самолета Ту-154 выявились следующие недостатки системы управления стабилизатором.
1. Имели место случаи неперекладки стабилизатора с 3 до 5,5o при довыпуске закрылков в посадочное положение по причине кратковременного отказа нормально открытых контактов датчика положения стабилизатора в цепи довыпуска особенно в осенне-зимний период при большой влажности.
2. Неправильные действия экипажа при механических отказах стабилизатора (типа заклинения), заключающиеся в оставлении переставного переключателя ручного управления в положении "КАБРИР" при работающем приводе, что может привести к очень опасным последствиям, например к спеканию фрикционной муфты привода при длительной пробуксовке и, как следствие, к неожиданной для экипажа перекладке стабилизатора или к самопроизвольной перекладке стабилизатора на кабрирование при уходе на второй круг за счет снижения противодействующей аэродинамической нагрузки на стабилизатор при уборке закрылков.
3. Самопроизвольная перекладка стабилизатора во взлетное или посадочное положение из промежуточного между ними положения при закрытии предохранительного колпачка переключателя ручного управления после проведения ручной корректировки положения стабилизатора при появлении неисправности в системе, например контактора кабрирования или пикирования, или неисправностей в электрических цепях управления ими. Руководством по летной эксплуатации запрещается закрывать колпачок переключателя ручного управления после корректировки положения стабилизатора.
Во втором и в третьем случаях имеет место комбинированный отказ: отказ техники и неправильные действия экипажа. Это усложняет ситуацию и снижает безопасность полета.
В целях повышения надежности системы управления стабилизатором и увеличения безопасности полетов путем исключения опасных последствий ошибок экипажа предлагается система управления аэродинамическими поверхностями самолета, содержащая двухканальный привод и два канала управления, каждый из которых содержит источники питания постоянного и переменного тока, концевой выключатель, кинематически соединенный с рукояткой управления закрылками, второй концевой выключатель, кинематически соединенный с предохранительным колпачком переключателя ручного режима управления стабилизатором, два задающих датчика положения стабилизатора, восемь реле управления, три контактора, коробку защиты электродвигателя привода, четыре диода, пять датчиков положения стабилизатора, три датчика положения закрылков, три электроцепи управления, соединенные с блоком управления закрылками, при этом источники питания постоянного тока соединены соответственно с входом второго концевого выключателя и с входом пятой и шестой контактных групп второго контактора, а источники переменного тока соединены соответственно с входами контактных групп первого контактора, вход первого концевого выключателя соединен с нормально замкнутым контактом второго концевого выключателя и с входами контактных групп первого и второго реле, нормально замкнутый контакт первого концевого выключателя соединен с входом третьего датчика положения закрылков, а нормально открытый контакт первого концевого выключателя соединен с входом второго задающего датчика, нормально открытый контакт второго концевого выключателя соединен с обмоткой управления третьего реле, вход первого задающего датчика соединен с нормально разомкнутым контактом первого датчика положения закрылков, контакт "П" первого задающего датчика соединен с входом четвертого датчика положения стабилизатора и с нормально открытым контактом четвертой контактной группы четвертого реле, контакт "С" первого задающего датчика соединен с нормально открытым контактом третьей контактной группы четвертого реле и с входом третьего датчика положения стабилизатора, а также с нормально замкнутым контактом четвертого датчика положения стабилизатора, контакт "П" второго задающего датчика соединен с выходом первого датчика положения стабилизатора, контакт "С" второго задающего датчика положения стабилизатора соединен с входом второго датчика положения стабилизатора, контакт "З" второго задающего датчика положения стабилизатора соединен с входом второй контактной группы шестого реле, обмотка управления первого реле соединена с первой и второй электроцепями, нормально открытый контакт первого реле соединен с катодом третьего диода и обмоткой управления четвертого реле, обмотка управления второго реле соединена с второй и третьей электроцепями, нормально замкнутый контакт второго реле соединен с нормально замкнутым контактом второго датчика положения закрылков, вход контактной группы третьего реле соединен с обмоткой управления первого контактора, а нормально замкнутый контакт третьего реле соединен с корпусом самолета, вход первой контактной группы четвертого реле соединен с входом второй контактной группы пятого реле, нормально замкнутый контакт первой контактной группы четвертого реле соединен с нормально замкнутым контактом второй контактной группы пятого реле и с нормально открытым контактом третьего датчика положения закрылков, нормально открытый контакт первой контактной группы четвертого реле соединен с анодом третьего диода, вход второй контактной группы четвертого реле соединен с нормально замкнутыми контактами первого и второго датчиков положения стабилизатора и с входом первой контактной группы шестого реле, нормально замкнутый контакт четвертого реле соединен с анодом второго диода, нормально открытый контакт второй контактной группы четвертого реле соединен с входом первого датчика положения закрылков и с катодом первого диода, вход третьей контактной группы четвертого реле соединен с нормально замкнутым контактом первого датчика положения стабилизатора, нормально замкнутый контакт третьей контактной группы четвертого реле соединен с нормально замкнутым контактом четвертой контактной группы четвертого реле, с нормально замкнутым контактом второй контактной группы шестого реле, с нормально замкнутым контактом первого датчика положения закрылков, с нормально открытым контактом третьего, четвертого и пятого датчиков положения стабилизатора и с обмоткой управления седьмого реле, вход четвертой контактной группы четвертого реле соединен с нормально замкнутым контактом второго датчика положения стабилизатора, обмотка управления пятого реле соединена с входом второго датчика положения закрылков, с катодом четвертого диода и с обмоткой управления шестого реле, нормально открытый контакт пятого реле соединен с анодом четвертого диода, нормально замкнутый контакт первой контактной группы шестого реле соединен с анодом первого диода, нормально открытые контакты первой и второй контактных групп шестого реле соединены с катодом второго диода, с нормально замкнутым контактом третьего датчика закрылков и с входом пятого датчика положения стабилизатора, входы второй и первой контактных групп седьмого реле соединены соответственно с восьмой и с девятой клеммами коробки защиты электродвигателя, нормально замкнутые контакты первой контактной группы седьмого реле соединены с выходом пятой, шестой контактных групп третьего контактора и с входом второй контактной группы восьмого реле, нормально замкнутый контакт второй контактной группы седьмого реле соединен с обмоткой управления первого контактора, обмотка управления восьмого реле соединена с десятой клеммой коробки защиты двигателя, вход первой контактной группы восьмого реле соединен с корпусом самолета, нормально открытые контакты первой и второй контактных групп восьмого реле соединены соответственно с пятой и шестой клеммами привода, выходы обмоток управления реле второго, третьего, четвертого, пятого, шестого, седьмого и восьмого, а также второго и третьего контакторов соединены с корпусом самолета, выход первой контактной группы первого контактора соединен с выходами второй и третьей контактных групп второго контактора, выход второй контактной группы первого контактора соединен с входом первой и четвертой контактных групп второго контактора, выход третьей контактной группы первого контактора соединен с первой клеммой коробки защиты двигателя, обмотка управления второго контактора соединена с нормально замкнутым контактом третьего датчика положения стабилизатора, выход каждой контактной группы второго контактора соединен с входом одноименной контактной группы третьего контактора, обмотка управления третьего контактора соединена с нормально замкнутым контактом пятого положения стабилизатора, выходы первой и второй контактных групп третьего контактора соединены с третьей клеммой коробки защиты двигателя, выходы третьей и четвертой контактных групп третьего контактора соединены с второй клеммой коробки защиты двигателя, четвертая, пятая, шестая клеммы коробки защиты двигателя соединены соответственно с первой, второй и третьей клеммами привода стабилизатора, седьмая клемма коробки защиты двигателя соединена с корпусом самолета, отличающаяся тем, что в каждый канал управления введены дополнительно нажимной переключатель ручного режима управления стабилизатором, одно реле (девятое), два диода (пятый и шестой) и две электроцепи, при этом вход первой контактной группы нажимного переключателя соединен с нормально открытым контактом второго концевого выключателя и с обмоткой управления третьего реле, а первый выход соединен с контактом "П" первого задающего датчика положения стабилизатора и с нормально открытым контактом третьей контактной группы четвертого реле, и с нормально замкнутым контактом третьего датчика положения стабилизатора, вход второй контактной группы нажимного переключателя соединен с корпусом самолета, а оба выхода соединены с нормально открытым контактом третьего реле, один вход обмотки управления девятого реле соединен с корпусом самолета, второй вход соединен с нормально замкнутым контактом первого датчика положения стабилизатора и с анодом пятого диода, катод которого соединен с входом третьей контактной группы четвертого реле, катод шестого диода соединен с нормально открытым контактом первого датчика положения стабилизатора и с входом первой контактной группы шестого реле, а анод соединен с входом контактной группы девятого реле, нормально замкнутый контакт которого соединен с входом первого датчика положения стабилизатора, первая электроцепь соединена с нормально замкнутым контактом второй контактной группы четвертого реле, с анодом первого диода и с нормально замкнутым контактом первой контактной группы пятого реле, вторая электроцепь соединена с входом первой контактной группы пятого реле и с обмоткой управления седьмого реле.
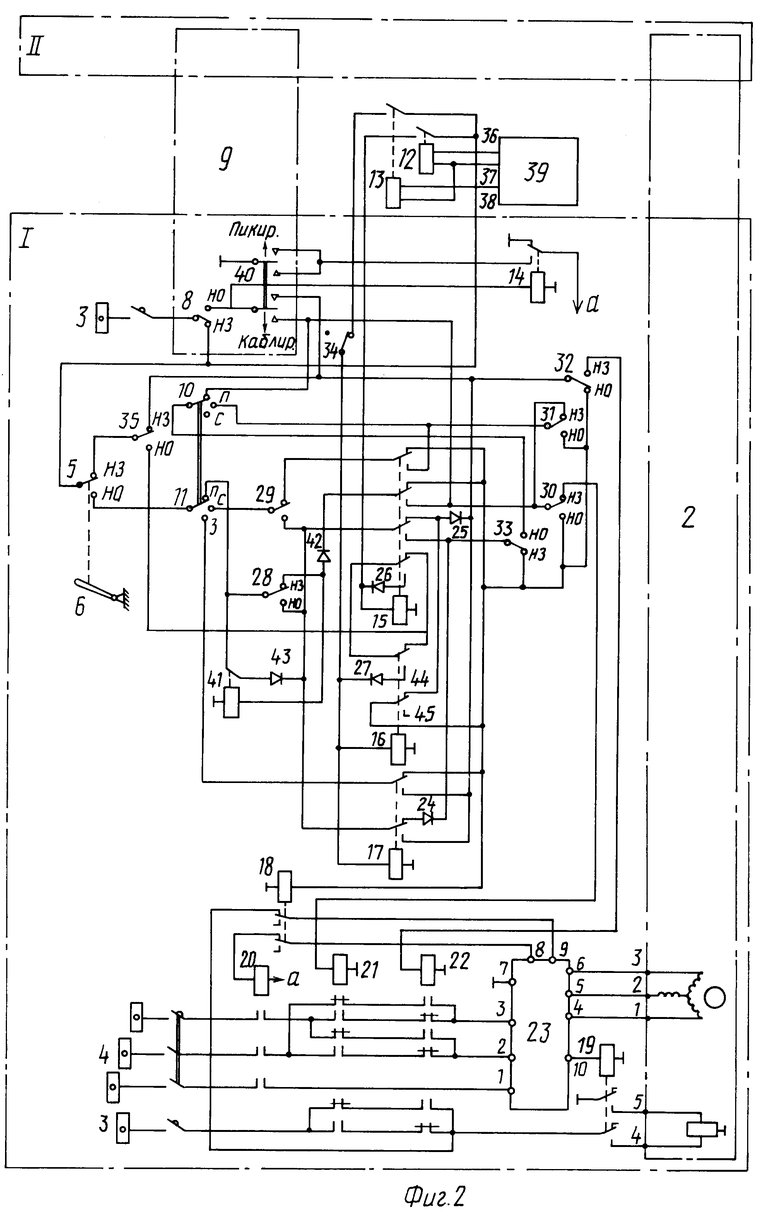
На фиг. 1 представлен самолет; на фиг. 2 - принципиальная электрическая схема системы управления стабилизатором самолета.
На фиг. 2 контактные реле показаны при обесточенных обмотках управления реле, при этом обеспечивается прохождение электрических сигналов через контакты, называемые в технической литературе замыкающими или нормально замкнутыми (н. з. ). При срабатывании реле его контактные группы перемещаются в новое положение, обеспечивающее прохождение электрических сигналов через контакты, называемые размыкающими или нормально открытыми (н.о.). Для упрощения описания в тексте принимаем сокращение контактов как для реле, так и для концевых выключателей и датчиков: нормально замкнутые - н.з.; нормально открытые - н.о.
Система управления стабилизатором 1 содержит двухканальный привод 2 и два канала управления I и II. Каналы управления идентичны и поэтому в дальнейшем будет рассматриваться только один I канал, который содержит источники 3 питания постоянного тока, источники 4 питания переменного тока, концевой выключатель 5, кинематически связанный с рукояткой 6 управления закрылками 7, концевой выключатель 8, кинематически связанный с предохранительным колпачком 9 переключателя ручного режима управления стабилизатором, задающие датчики положения стабилизатора 10(1) и 11(2), реле 12(1), 13(2), 14(3), 14(3), 15(4), 16(5), 17(6), 18(7), 19(8), контакторы 20(1), 21(2), 22(3), коробка защиты электродвигателя (КЗД) 23, диоды 24(1), 25(2), 26(3), 27(4), датчики положения стабилизатора 28(1), 29(2), 30(3), 31(4), 32(5), датчики положения закрылков 33(1), 34(2) и 35(3), электроцепи управления 36, 37, 38, блок управления закрылками 39, нажимной переключатель ручного режима управления стабилизатором 40, реле 41(9), диоды 42(5) и 43(6), электроцепи 44(1) и 45(2).
При заходе на посадку перекладка стабилизатора в посадочное положение осуществляется в два этапа совместно с закрылками. На первом этапе осуществляются выпуск закрылков и перекладка стабилизатора во взлетное положение, на втором этапе - довыпуск закрылков и перекладка стабилизатора в посадочное положение. При установке рукоятки 6 управления закрылками во взлетное положение начинается выпуск закрылков в заданное рукояткой положение и одновременно срабатывает концевой выключатель 5. Напряжение +27В с источника 3 питания поступает на вход концевого выключателя 5 и на входы контактов реле 12 и 13. В процессе выпуска закрылков на обмотку реле 12 из блока управления закрылками 39 по электроцепям 36 и 37 поступают сигналы управления, реле 12 срабатывает и через его н.о. контакты напряжение +27В поступает на обмотку реле 15, реле 15 срабатывает. Напряжение +27В с н.о. контакта концевого выключателя 5 поступает через н.з. контакт реле 16, через н.о. контакт первой контактной группы реле 15 и через диод 26 на обмотку реле 15, тем самым обеспечивая его самоблокировку. Одновременно напряжение +27В поступает через контакт "П" задатчика 11 и н.з. контакт датчика стабилизатора 28 на обмотку реле 41, которое срабатывает и размыкает цепь диода 43, и через диод 42, н. о. контакт третьей контактной группы реле 15, н.з. контакт датчика положения стабилизатора 30 поступает на обмотку управления контактора 21, который срабатывает и своими контактами подготавливает цепь подачи напряжения переменного тока на КЗД 23, а также замыкает цепь подачи напряжения +27В с источника 3 питания через н.з. контакт реле 18 на вход КЗД 23. При исправности КЗД напряжение +27В с КЗД 23 по цепи выхода поступает через н.з. контакт реле 18 на обмотку контактора 20. Контактор 20 срабатывает и своими н.з. контактами подключает три фазы источника 4 переменного тока в КЗД 23. При исправности фаз с КЗД 23 переменное напряжение поступает на обмотки электродвигателя, постоянное напряжение +27В поступает на обмотку управления реле 19, которое срабатывает и подключает своими н.о. контактами обмотки электромагнитной муфты привода 2. Начинается перекладка стабилизатора на кабрирование. При достижении стабилизатором взлетного положения срабатывает датчик положения стабилизатором 28 и напряжение +27В снимается с н.з. контакта и подключается к н.о. контакту. Цепь кабрирования размыкается и стабилизатор останавливается. Контакты обесточенного реле 41 занимают исходное н.з. положение и восстанавливают цепь шунтирования н.о. контакта датчика 28 через диод 43. Напряжение +27В с н.о. контакта датчика положения стабилизатора 28 поступает через н. о. контакт второй контактной группы реле 15 на н.з. контакт датчика положения закрылков 33 и далее на обмотку управления реле 18, которое срабатывает и своими н.о. контактами размыкает цепи управления контактора 20 и КЗД 23, тем самым осуществляя дополнительную блокировку включения привода от ложных управляющих сигналов. Довыпуск закрылков и перекладка стабилизатора в посадочное положение осуществляется следующим образом. Рукоятка управления закрылками 6 устанавливается в посадочное положение (концевой выключатель 5 остается в положении н. о.) и закрылки начинают перемещаться в посадочное положение. При достижении закрылками угла больше взлетного датчик положения закрылков 33 срабатывает и снимает напряжение +27В с н.з. контакта, отключая питание с обмотки реле 18 блокировки. Контакты реле 18 возвращаются в исходное положение, восстанавливая цепь управления контактора 20 и КЗД 23. Напряжение +27В с н.о. контакта датчика положения закрылков 33 поступает через контакт "П" задатчика положения стабилизатора 10 и далее через н.з. контакт датчика положения стабилизатора 30 на обмотку управления контактора 21, который срабатывает и включает по уже известной схеме КЗД 23, контактор 20, реле 19 и привод 2. Стабилизатор начинает перемещаться на кабрирование. При достижении стабилизатором посадочного положения датчик положения стабилизатора 30 срабатывает, размыкая цепь кабрирования, и через н.о. контакт подключает напряжение +27В к обмотке управления реле блокировки 18. Стабилизатор останавливается.
В некоторых случаях возникает необходимость ручной корректировки стабилизатора на пикирование из посадочного положения в промежуточное (между посадочным и взлетным). В этом случае система работает следующим образом.
При открытии колпачка 9 переключателя 40 срабатывает кинематически связанный с ним концевой выключатель 8 и через н.о. контакт подключает напряжение +27В к входу первой контактной группы переключателя 40 и к обмотке управления реле 14, которое срабатывает и подключает своим н.о. контактом минусовую цепь обмотки управления контактора 20 к обоим выходным контактам второй контактной группы переключателя 40. Вход второй контактной группы переключателя 40 соединен с корпусом самолета. При нажатии переключателя +27В поступает в цепь пикирования и через н.з. контакт датчика положения стабилизатора 32 поступает на контактор пикирования 22. Вторая контактная группа переключателя 40 замыкает на корпус самолета минусовую цепь обмотки управления контактора 20. Контактор 20 срабатывает и включает привод по описанной выше схеме. Стабилизатор начинает перемещаться в сторону пикирования. При достижении стабилизатором требуемого положения (контроль осуществляется по указателю) переключатель 40 отпускается и он занимает нейтральное положение. Цепь пикирования обесточивается, стабилизатор останавливается.
При закрытии колпачка 9 концевой выключатель 8 займет положение н.з. и подключит напряжение +27В к электроцепям совмещенного управления. Напряжение +27В снова появится на н.о. контакте датчика 28. Реле 15 при этом находится в нерабочем положении (все четыре контактные группы находятся в положении н. з. ). Напряжение +27В через н.з. контакт второй контактной группы реле 15, черед диод 25 и н.з. контакт датчика положения стабилизатора 32 (положение н. о. контакт датчика занимает только в крайнем, полетном положении стабилизатора) поступает на обмотку управления контактора 22 пикирования и контактор срабатывает. Одновременно напряжение +27В с н.о. контакта датчика 28 через н.о. контакт реле 17, через диод 24, через н.о. контакт датчика положения закрылков 33, через контакт "П" задатчика положения стабилизатора 10 и далее через н. з. контакт датчика положения стабилизатора 30 поступает на обмотку управления контактора 21 кабрирования и контактор 21 срабатывает.
Допустим, что вновь введенные электроцепи 44 и 45 отсутствуют. В этом случае привод 2 не включится, так как контактные группы включенных контакторов 21 и 22 взаимно исключат прохождение на привод сигналов как переменного, так и постоянного тока.
Предположим, что произошел отказ контактора 22 или цепей его управления. Тогда произойдет перекладка стабилизатора из промежуточного положения в посадочное. При отказе контактора 21 произойдет перекладка стабилизатора на пикирование, и при достижении стабилизатором взлетного положения срабатывает датчик положения стабилизатора 28 и переключит напряжение +27В с н.о. контакта на н.з. контакт, срабатывает реле 41 и разомкнет цепь шунтирования н.о. контакта датчика 28. Отключится электропитание цепей пикирования и кабрирования. Стабилизатор останавливается. При этом напряжение +27В с н.з. контакта датчика положения стабилизатора 28 через диод 42 и далее через н.з. контакт третьей контактной группы реле 15 поступает на обмотку управления реле 18 блокировки, которое срабатывает и размыкает цепи управления контактора 20 и КЗД 23.
Вернемся к наличию электроцепей 44 и 45 и к исходному положению стабилизатора (больше взлетного) после закрытия колпачка 9. Напряжение +27В поступает не только в обмотки управления контакторов 21 и 22, но и через электроцепь 44, далее через н.з. контакт первой контактной группы реле 16, через электроцепь 45 на обмотку реле 18 блокировки, которое срабатывает и своими н. о. контактами размыкает цепи управления контактора 20 и КЗД 23. Таким образом, даже при отказе контактора 21 или 22 самопроизвольной перекладки стабилизатора не произойдет.
Рассмотрим работу системы при уходе на второй круг после ручной корректировки положения стабилизатора и закрытия колпачка переключателя ручного управления. При уходе на второй круг закрылки и стабилизатор убираются в полетное положение 0o в два этапа. На первом этапе рукоятка 6 управления закрылками устанавливается из посадочного положения во взлетное положение и начинается уборка закрылков во взлетное положение. В процессе уборки закрылков из блока управления закрылками 39 по электроцепям 37 и 38 поступают сигналы управления на обмотку реле 13, которое срабатывает, и напряжение +27В через н.о. контакт реле 13 и далее через н.з. контакт датчика положения закрылков 34 подается на обмотку управления реле 16 и 17, которые срабатывают. Напряжение +27В через н.з. контакт первой контактной группы реле 15, далее через н.о. контакт второй контактной группы реле 16, далее через диод 27 подается в цепь обмоток управления реле 16 и 17, обеспечивая их самоблокировку. Напряжение +27В с н.о. контакта датчика положения стабилизатора 28 через н.з. контакт второй контактной группы реле 15, через диод 25, через н. з. контакт датчика положения стабилизатора 32 подается на контактор пикирования 22. Параллельно напряжение +27В подается в цепь пикирования через н.о. контакт первой контактной группы реле 17. Контактор 22 срабатывает и по известной схеме происходит перекладка стабилизатора на пикирование. При достижении стабилизатором взлетного положения срабатывает датчик положения стабилизатора 28 и переключает напряжение +27В с н.о. контакта на контакт н.з., срабатывает реле 41, которое размыкает цепь шунтирования н.о. контакта датчика 28 и отключает электропитание цепей шунтирования. Стабилизатор останавливается. Напряжение +27В с н.з. контакта датчика положения стабилизатора 28 через диод 42 и далее через н.з. контакт третьей контактной группы реле 15 поступает на обмотку управления реле 18 блокировки, которое срабатывает и размыкает цепи управления контактора 20 и КЗД 23.
На втором этапе рукоятка 6 управления закрылками устанавливается из взлетного положения в убранное и закрылки начинают перемещаться в полетное положение 0o. Кинематически связанный с рукояткой 6 концевой выключатель 5 переключается с н.о. контакта на контакт н.з. и продолжает запитывать через н. о. контакт датчика положения закрылков 35 цепи совмещенного управления. При достижении закрылками угла меньше взлетного срабатывает датчик положения закрылков 35 и снимает электропитание с цепей совмещенного управления и подает напряжение +27В через н.з. контакт датчика положения стабилизатора 32 на контактор пикирования 22, в результате чего происходит перекладка стабилизатора на пикирование. При достижении стабилизатором полетного положения 0o срабатывает датчик положения стабилизатора 32, снимает электропитание с контактора 22 и через н.о. контакт включает реле 18 блокировки. Стабилизатор останавливается.
При полетах со средней центровкой задатчик положения стабилизатора устанавливается в положение "С". Величина взлетного и посадочного угла стабилизатора при средней центровке меньше взлетного и посадочного угла при передней центровке. Схема работы при средней центровке аналогична схеме работы при передней центровке, с той лишь разницей, что при средней центровке задействованы датчик положения стабилизатора 29 для взлетного угла и датчик 31 для посадочного угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНО-СИГНАЛЬНАЯ СИСТЕМА | 1997 |
|
RU2130874C1 |
| Устройство для регулирования температуры нагревательной печи прокатного стана | 1980 |
|
SU857945A1 |
| Способ управления движением подвижных составов на участке шлюзования и устройство для его осуществления | 1987 |
|
SU1520250A1 |
| РЕЛЕ-КОНТАКТНАЯ ЗАЩИТА ЛИФТА (ВАРИАНТЫ) | 2000 |
|
RU2196095C2 |
| Электрическая передача электровоза | 2017 |
|
RU2674998C1 |
| СПОСОБ ПОВЫШЕНИЯ ЖИВУЧЕСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ ЛЕТАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ЕГО БЛОК КОММУТАЦИИ | 2004 |
|
RU2279995C1 |
| Устройство для управления дистанционным переключателем | 1982 |
|
SU1111131A1 |
| УСТРОЙСТВО ДЛЯ МНОГОКАНАЛЬНОЙ СИГНАЛИЗАЦИИ | 2005 |
|
RU2297672C1 |
| Самоконтролирующаяся система электропитания постоянного напряжения | 1981 |
|
SU1001298A1 |
| ЗАЩИТНОЕ УСТРОЙСТВО СТАНКА | 2012 |
|
RU2510555C1 |
Система управления решает задачу увеличения безопасности полетов на взлете, посадке и при уходе на второй круг. Система содержит двухканальный привод и два канала управления, каждый из которых включает источники питания постоянного и переменного тока, концевые выключатели, задатчик положения стабилизатора, реле управления датчики положения стабилизатора, датчики положения закрылков, блок управления закрылками и электрические цепи управления, нажимной переключатель ручного управления стабилизатора, два реле, четыре диода и четыре электроцепи управления. 2 ил.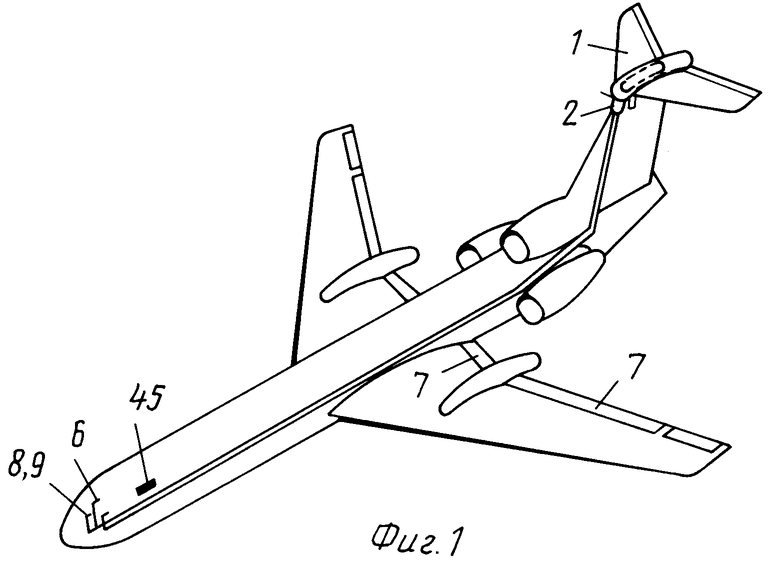
Система управления аэродинамическими поверхностями самолета, содержащая двухканальный привод и два канала управления, каждый из которых содержит источники питания постоянного и переменного тока, концевой выключатель, кинематически соединенный с рукояткой управления закрылками, второй концевой выключатель, кинематически соединенный с предохранительным колпачком переключателя ручного режима управления стабилизатором, два задающих датчика положения стабилизатора, восемь реле управления, три контактора, коробку защиты электродвигателя привода, четыре диода, пять датчиков положения стабилизатора, три датчика положения закрылков, три электроцепи управления, соединенные с блоком управления закрылками, при этом источники питания постоянного тока соединены соответственно с входом второго концевого выключателя и с входом пятой и шестой контактной группы второго контактора, а источники переменного тока соединены соответственно с входами контактных групп первого контактора, вход первого концевого выключателя соединен с нормально замкнутым контактом второго концевого выключателя и с входами контактных групп первого и второго реле, нормально замкнутый контакт первого концевого выключателя соединен с входом третьего датчика положения закрылков, а нормально открытый контакт первого концевого выключателя соединен с входом второго задающего датчика, нормально открытый контакт второго концевого выключателя соединен с обмоткой управления третьего реле, вход первого задающего датчика соединен с нормально разомкнутым контактом первого датчика положения закрылков, контакт "П" первого задающего датчика соединен с входом четвертого датчика положения стабилизатора и с нормально открытым контактом четвертой контактной группы четвертого реле, контакт "С" первого задающего датчика соединен с нормально открытым контактом третьей контактной группы четвертого реле и с входом третьего датчика положения стабилизатора, а также с нормально замкнутым контактом четвертого датчика положения стабилизатора, контакт "П" второго задающего датчика соединен с входом первого датчика положения стабилизатора, контакт "С" второго задающего датчика положения стабилизатора соединен с входом второго датчика положения стабилизатора, контакт "З" второго задающего датчика положения стабилизатора соединен с входом второй контактной группы шестого реле, обмотка управления первого реле соединена с первой и второй электроцепью, нормально открытый контакт первого реле соединен с катодом третьего диода и обмоткой управления четвертого реле, обмотка управления второго реле соединена с второй и третьей электроцепью, нормально замкнутый контакт второго реле соединен с нормально замкнутым контактом второго датчика положения закрылков, вход контактной группы третьего реле соединен с обмоткой управления первого контактора, а нормально замкнутый контакт третьего реле соединен с корпусом самолета, вход первой контактной группы четвертого реле соединен с входом второй контактной группы пятого реле, нормально замкнутый контакт первой контактной группы четвертого реле соединен с нормально замкнутым контактом второй контактной группы пятого реле и с нормально открытым контактом третьего датчика положения закрылков, нормально открытый контакт первой контактной группы четвертого реле соединен с анодом третьего диода, вход второй контактной группы четвертого реле соединен с нормально замкнутыми контактами первого и второго датчиков положения стабилизатора и с входом первой контактной группы шестого реле, нормально замкнутый контакт четвертого реле соединен с анодом второго диода, нормально открытый контакт второй контактной группы четвертого реле соединен с входом первого датчика положения закрылков и с катодом первого диода, вход третьей контактной группы четвертого реле соединен с нормально замкнутым контактом первого датчика положения стабилизатора, нормально замкнутый контакт третьей контактной группы четвертого реле соединен с нормально замкнутым контактом четвертой контактной группы четвертого реле, с нормально замкнутым контактом второй контактной группы шестого реле, с нормально замкнутым контактом первого датчика положения закрылков, с нормально открытым контактом третьего, четвертого и пятого датчиков положения стабилизатора и с обмоткой управления седьмого реле, вход четвертой контактной группы четвертого реле соединен с нормально замкнутым контактом второго датчика положения стабилизатора, обмотка управления пятого реле соединена с входом второго датчика положения закрылков, с катодом четвертого диода и с обмоткой управления шестого реле, нормально открытый контакт пятого реле соединен с анодом четвертого диода, нормально замкнутый контакт первой контактной группы шестого реле соединен с анодом первого диода, нормально открытые контакты первой и второй контактной группы шестого реле соединены с катодом второго диода, с нормально замкнутым контактом третьего датчика закрылков и с входом пятого датчика положения стабилизатора, входы второй и первой контактной группы седьмого реле соединены соответственно с восьмой и с девятой клеммой коробки защиты электродвигателя, нормально замкнутые контакты первой контактной группы седьмого реле соединены с выходом пятой, шестой контактных групп третьего контактора и с входом второй контактной группы восьмого реле, нормально замкнутый контакт второй контактной группы седьмого реле соединен с обмоткой управления первого контактора, обмотка управления восьмого реле соединена с десятой клеммой коробки защиты двигателя, вход первой контактной группы восьмого реле соединен с корпусом самолета, нормально открытые контакты первой и второй контактных групп восьмого реле соединены соответственно с пятой и шестой клеммой привода, выходы обмоток управления реле второго, третьего, четвертого, пятого, шестого, седьмого и восьмого, а также второго и третьего контакторов соединены с корпусом самолета, выход первой контактной группы первого контактора соединен с выходами второй и третьей контактных групп второго контактора, выход второй контактной группы первого контактора соединен с входом первой и четвертой контактных групп второго контактора, выход третьей контактной группы первого контактора соединен с первой клеммой коробки защиты двигателя, обмотка управления второго контактора соединена с нормально замкнутым контактом третьего датчика положения стабилизатора, выход каждой контактной группы второго контактора соединен с входом одноименной контактной группы третьего контактора, обмотка управления третьего контактора соединена с нормально замкнутым контактом пятого датчика положения стабилизатора, выходы первой и второй контактных групп третьего контактора соединены с третьей клеммой коробки защиты двигателя, выходы третьей и четвертой контактных групп третьего контактора соединены с второй клеммой коробки защиты двигателя, четвертая, пятая, шестая клемма коробки защиты двигателя соединены соответственно с первой, второй и третьей клеммой привода стабилизатора, седьмая клемма коробки защиты двигателя соединена с корпусом самолета, отличающаяся тем, что в каждый канал управления введены дополнительно нажимной переключатель ручного режима управления стабилизатором, одно реле (девятое), два диода (пятый и шестой) и две электроцепи, при этом вход первой контактной группы нажимного переключателя соединен с нормально открытым контактом второго концевого выключателя и с обмоткой управления третьего реле, а первый выход соединен с контактом "П" первого задающего датчика положения стабилизатора и с нормально открытым контактом третьей контактной группы четвертого реле, и с нормально замкнутым контактом третьего датчика положения стабилизатора, вход второй контактной группы нажимного переключателя соединен с корпусом самолета, а оба выхода соединены с нормально открытым контактом третьего реле, один вход обмотки управления девятого реле соединен с корпусом самолета, второй вход соединен с нормально замкнутым контактом первого датчика положения стабилизатора и с анодом пятого диода, катод которого соединен с входом третьей контактной группы четвертого реле, а катод шестого диода соединен с нормально открытым контактом первого датчика положения стабилизатора и с входом первой контактной группы шестого реле, а анод соединен с входом контактной группы девятого реле, нормально замкнутый контакт которого соединен с входом первого датчика положения стабилизатора, первая электроцепь соединена с нормально замкнутым контактом второй контактной группы четвертого реле, с анодом первого диода и с нормально замкнутым контактом первой контактной группы пятого реле, вторая электроцепь соединена с входом первой контактной группы пятого реле и с обмоткой управления седьмого реле.
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| - М.: Изв | |||
| разработчика, 1982. | |||

