Изобретение относится к области исследования прочностных свойств грунтов в природных условиях путем динамического зондирования грунта.
Задача изобретения состоит в повышении производительности при измерении плотности грунта, расширении технологических возможностей, а также в уменьшении трудоемкости измерения.
Повышение производительности достигается за счет того, что измерение плотности производится в процессе перемещения устройства, то есть, нет потерь времени на монтаж/демонтаж устройства.
Расширение технологических возможностей происходит вследствие того, что в процессе замера твердости почвы происходит также снятие профилограммы поверхности.
Уменьшение трудоемкости измерения достигается за счет того, что задавливание зонда производится автоматически, в зависимости от перемещения устройства.
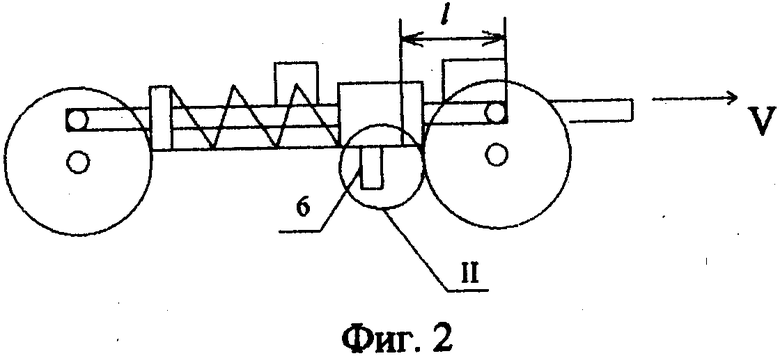
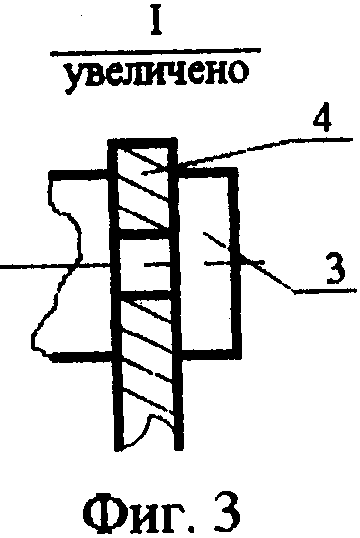
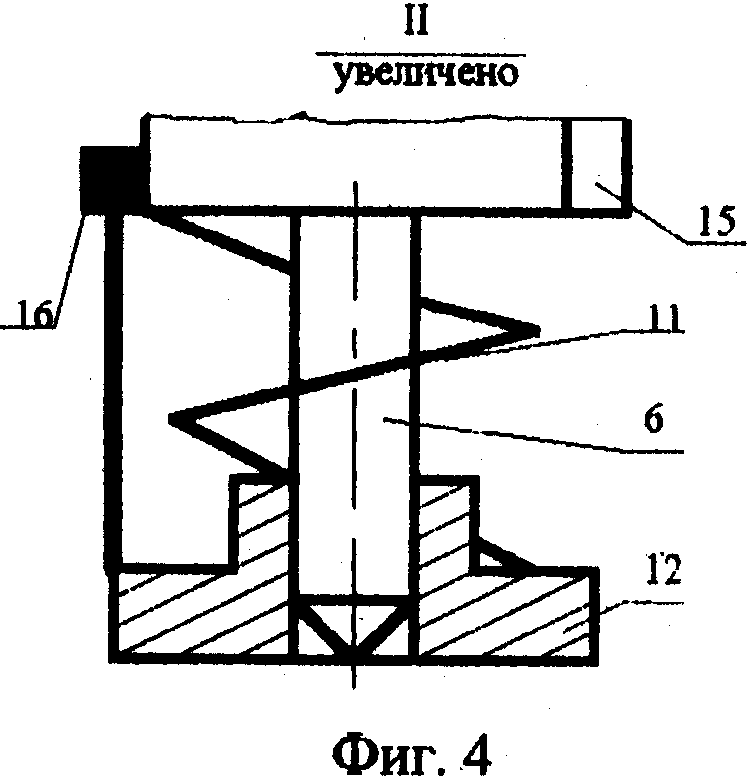
На фиг. 1 изображено предлагаемое устройство, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, увеличенное изображение крепления направляющей ползуна к оси; на фиг. 4 - то же, увеличенное изображение крепления шайбы к ползуну.
Задача решается тем, что устройство для задавливания зонда и снятия профилограмм поверхностей содержит раму по крайней мере одну направляющую, установленную на осях, расположенных на опорных колесах на одинаковых расстояниях, от осей опорных колес с возможностью колебательных движений в вертикальной плоскости, подпружиненный ползун для установки зонда, размещенный на направляющей с возможностью перемещения вдоль нее и приспособление для снятия профилограмм поверхности, выполненное в виде подпружиненной к ползуну в нижней его части шайбы, взаимодействующей с датчиком начала перемещения зонда, установленным на ползуне и датчика отклонения рамы от вертикали, установленного на раме.
Устройство для задавливания зонда и снятия профилограмм поверхностей состоит из двух частей, которые симметричны относительно продольной оси. Каждая часть состоит из рамы 1, на которой закреплены два опорных колеса 2, причем, расстояние между осями колес должно быть кратно  где rк - радиус колеса. На колесах 2 на одинаковом расстоянии от центра расположены оси 3 направляющей 4. На направляющей 4 установлен ползун 5. На ползуне 5 жестко закреплен зонд 6 любой известной конструкции (авт.св. СССР N 415550, кл. G 01 N 3/42, 1979). Также на ползуне установлена пружина 7, которая обеспечивает возврат ползуна 5 в исходное положение, а также упор 8 пружины 7. Части устройства между собой соединены шарнирно балкой 9, которая позволяет каждой из частей поворачиваться вокруг оси балки. На балке 9 жестко закреплено дышло 10 для прицепления устройства к транспортному средству. На зонде 6 установлена пружина 11 с прикрепленной к ней шайбой 12. На раме 1 каждой из частей установлены датчики 13 (гировертикали) отклонения рамы от вертикали и известные датчики углов поворота колеса (например, датчик ДБК-1/14). Начальное положение ползуна 5 относительно оси 3 направляющей 4 ползуна (l) определяется упором 15. На ползуне 5 установлен датчик 16 начала перемещения зонда (тензометрический датчик), который служит для определения момента начала перемещения зонда 6 относительно шайбы 12.
где rк - радиус колеса. На колесах 2 на одинаковом расстоянии от центра расположены оси 3 направляющей 4. На направляющей 4 установлен ползун 5. На ползуне 5 жестко закреплен зонд 6 любой известной конструкции (авт.св. СССР N 415550, кл. G 01 N 3/42, 1979). Также на ползуне установлена пружина 7, которая обеспечивает возврат ползуна 5 в исходное положение, а также упор 8 пружины 7. Части устройства между собой соединены шарнирно балкой 9, которая позволяет каждой из частей поворачиваться вокруг оси балки. На балке 9 жестко закреплено дышло 10 для прицепления устройства к транспортному средству. На зонде 6 установлена пружина 11 с прикрепленной к ней шайбой 12. На раме 1 каждой из частей установлены датчики 13 (гировертикали) отклонения рамы от вертикали и известные датчики углов поворота колеса (например, датчик ДБК-1/14). Начальное положение ползуна 5 относительно оси 3 направляющей 4 ползуна (l) определяется упором 15. На ползуне 5 установлен датчик 16 начала перемещения зонда (тензометрический датчик), который служит для определения момента начала перемещения зонда 6 относительно шайбы 12.
Устройство для задавливания зонда и снятие профилограмм поверхностей работает следующим образом.
Устройство дышлом 10 закрепляется к транспортному средству. В начальный момент времени оси 3 направляющей 4 находятся в верхнем положении. При движении оси 3 направляющей 4 начинают вращаться по заданному радиусу (одинаковому для обоих колес), а направляющая 4 начинает опускаться. В момент касания шайбой 12 почвы начинает сжиматься пружина 11, что фиксируется датчиком 16, установленным на ползуне 4. В этот момент при помощи датчика 14 фиксируется угол поворота колеса ϕ. По этому углу определяется величина, на которую опустился зонд:
h = ro-ro•cosϕ,
где
h - величина опускания зонда;
rо - расстояние от оси колеса до оси направляющей.
При последующем движении происходит заглубление зонда и определяется плотность грунта по всей величине заглубления. Для этого постоянно фиксируется сопротивление почвы и величина заглубления, которая определяется по формуле:
h1= ro(cosϕ-cosϕ1),
где
h - величина задавливания зонда;
ϕ1 - угол, на который повернулось колесо от начального положения.
В момент полного заглубления зонда при помощи датчика 13 (гировертикали) фиксируется отклонение рамы 1 от горизонтального положения. Таким образом, получив значения величины начала заглубления зонда и отклонения рамы от горизонтали, определяется профиль поверхности, по которой происходит передвижение устройства: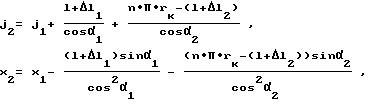
где
j1, j2 - горизонтальные координаты предыдущей и текущей точки измерения соответственно;
Δl1, Δl2 - смещение ползуна относительно начального положения в предыдущей и текучей точках измерения соответственно, определяется:
Δl = (π-ϕ2)•rк,
где ϕ2 - угол поворота колеса от момента касания зондом земли до момента полного заглубления зонда;
α1, α2 - угол наклона рамы от вертикали в предыдущей и текущей точках измерения соответственно;
n - кратность расстояния между осями направляющей;
x1, x2 - вертикальные координаты предыдущей и текучей точки измерения соответственно.
После вытаскивания зонда из почвы срабатывает пружина 7, которая возвращает ползун 5 в исходное положение.
Преимуществами изобретения является большая производительность по сравнению со стандартными, а также, то, что дополнительно определяется профиль исследуемой поверхности и уменьшается трудоемкость измерений.
Использование: измерение плотности грунтов со снятием профилограмм поверхности, по которой происходит движение устройства. Сущность изобретения: направляющие установлены на осях, расположенных на введенных в устройство опорных колесах на одинаковых расстояниях от осей опорных колес с возможностью колебательных движений в вертикальной плоскости, а также устройство снабжено подпружиненным ползуном, предназначенным для установки зонда, размещенным на направляющей с возможностью перемещения вдоль нее, и приспособлением для снятия профилограмм поверхности, выполненным в виде подпружиненной к ползуну, в нижней его части, шайбы, взаимодействующей с датчиком начала перемещения зонда, установленным на ползуне, и датчика отклонения рамы от вертикали, установленного на раме. Технический результат: повышение производительности при измерении плотности грунта, за счет того, что измерение проиводится в процессе движения устройства, т.е. не приходится затрачивать время на монтаж/демонтаж устройства; расширение технологических возможностей, а счет того, что одновременно с измерением твердости производится снятие профилограммы поверхности; уменьшение трудоемкости измерения, за счет того, что задавливание зонда производится автоматически, в зависимости от перемещения устройства. 4 ил.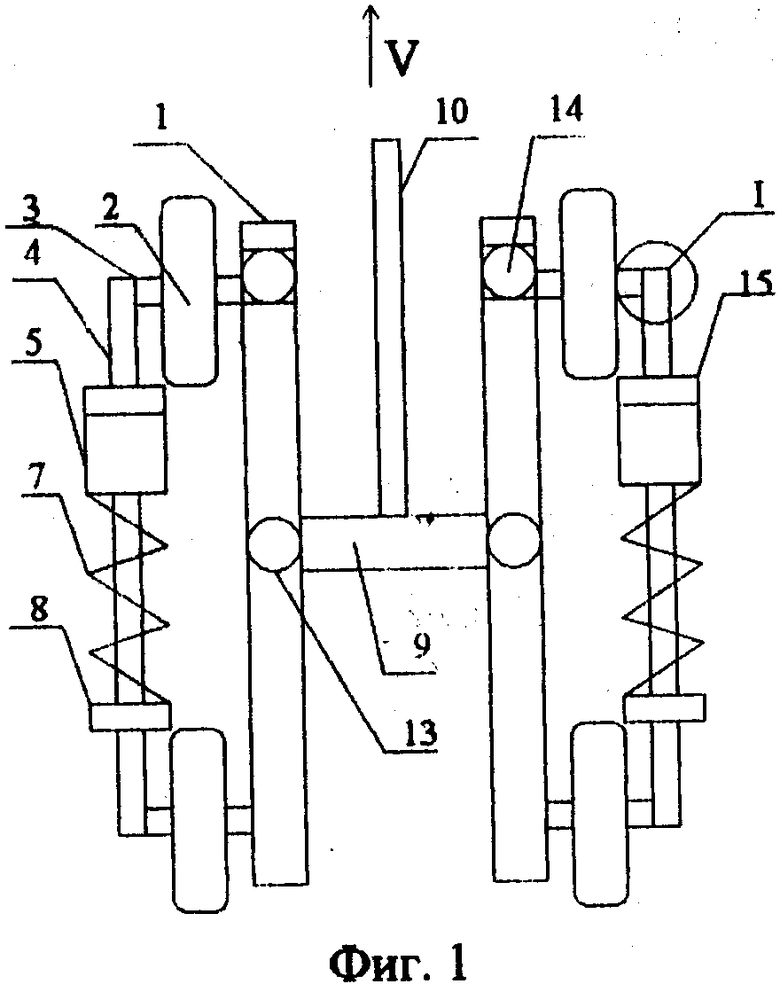
Устройство для задавливания зонда и снятия профилограмм поверхностей, содержащее раму, по крайней мере одну направляющую, установленную на осях, расположенных на опорных колесах на одинаковых расстояниях от осей опорных колес с возможностью колебательных движений в вертикальной плоскости, подпружиненный ползун для установки зонда, размещенный на направляющей с возможностью перемещения вдоль нее, и приспособление для снятия профилограмм поверхности, выполненное в виде подпружиненной к ползуну в нижней его части шайбы, взаимодействующей с датчиком начала перемещения зонда, установленным на ползуне, и датчика отклонения рамы от вертикали, установленного на раме.
