Изобретение относится к устройствам, предназначенным для управления положением светового потока фар транспортных средств из кабины водителя.
Известно устройство управления положением фар транспортного средства [1] , содержащее привод поворота фар, датчик положения фар, датчик положения рулевого механизма, блок сравнения, входы которого связаны соответственно с выходами датчика положения рулевого механизма и датчика положения фар, а выход подключен к входу привода поворота фар. Датчик положения фар и датчик положения рулевого механизма содержит цепь из параллельно соединенных излучающих элементов и фоторезисторы, соединенные по мостовой схеме, одна диагональ которой подключена к источнику питания, а другая является выходом датчика положения фар, и подвижную светоотражающую пластину для перекрытия светового потока, механически связанную соответственно с рулевым механизмом и фарами.
Недостатком такого устройства являются сложность конструкции датчиков, а запотевание отражающей пластины при смене температур и возможность запыленности в течение срока службы приводят к снижению или полному отсутствию отражающих свойств светоотражающих пластин и к выходу датчиков из строя.
Наиболее близким по технической сущности к предлагаемому является устройство управления положением фар транспортного средства, датчик и задатчик положения фар, подключенный входами к их выходам блок формирования управляющего сигнала, связанный с его выходом электродвигатель, закрепленный в корпусе, выполненном с направляющим отверстием [2].
Недостатком такого устройства является сложность конструкции исполнительного механизма. Кроме того, в указанных устройствах необходимо предусматривать защиту при аварийных режимах, возникающих, например, при выходе из строя элементов блока формирования управляющего сигнала и потенциометров. В этом случае электродвигатель будет включен под полное напряжение источника питания, вал электродвигателя будет вращаться в одном из направлений влево или вправо, поворот фар будет осуществляться только вверх и вниз, а, достигнув крайней точки, произойдут поломка фар и заклинивание электродвигателя.
Целью предлагаемого изобретения является повышение надежности работы устройства и его упрощение.
Поставленная цель достигается тем, что устройство управления положением фар транспортного средства, содержащее датчик и задатчик положения фар, подключенный входами к их выходам блок формирования управляющего сигнала, связанный с его выходом электродвигатель, закрепленный в корпусе, выполненном с направляющим отверстием, снабжено шестеренчатым редуктором, соединенным с валом электродвигателя и образующим с ним редукторный двигатель, укрепленным на валу этого двигателя кривошипом с пальцем, ось которого параллельна оси вращения кривошипа, и шатуном, выполненным с пазом на одном конце, в который входит палец кривошипа, другой конец шатуна проходит через направляющее отверстие, при этом шатун механически соединен с датчиком положения фар.
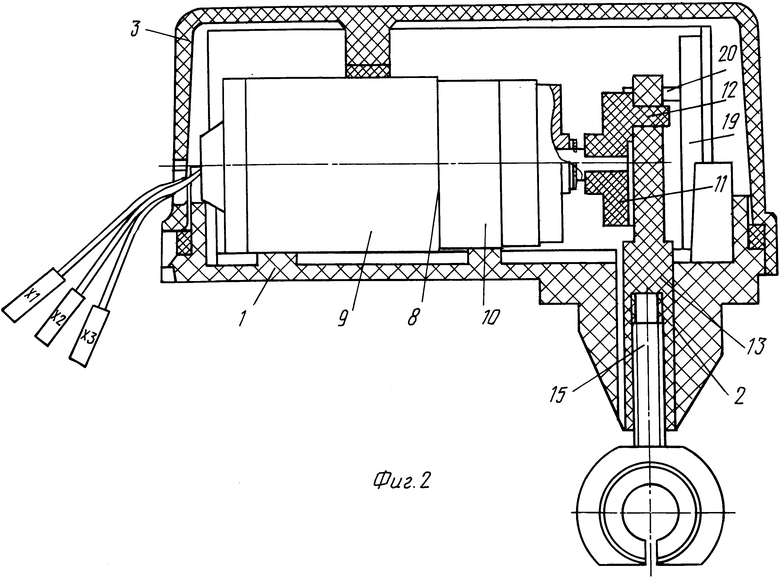
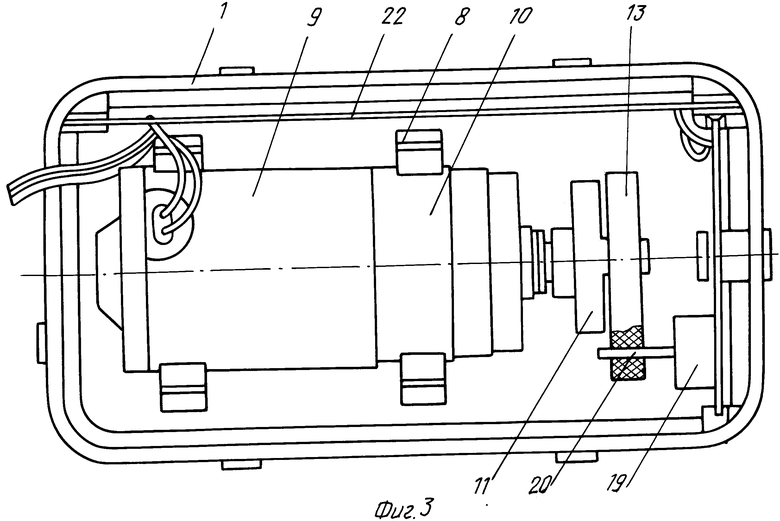
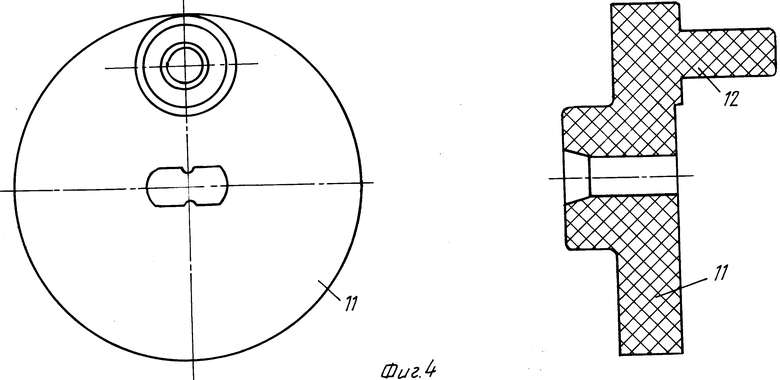
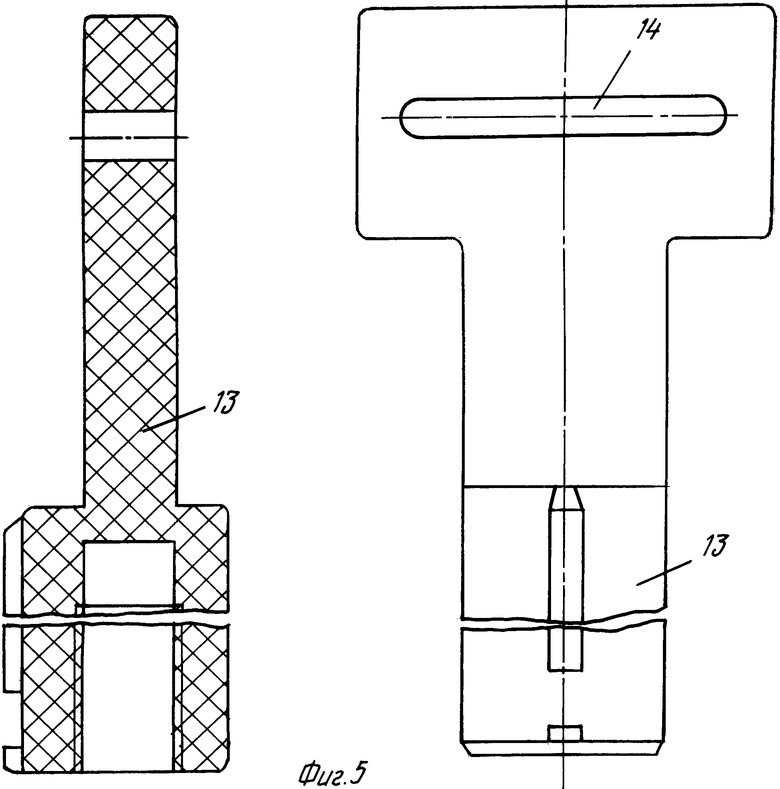
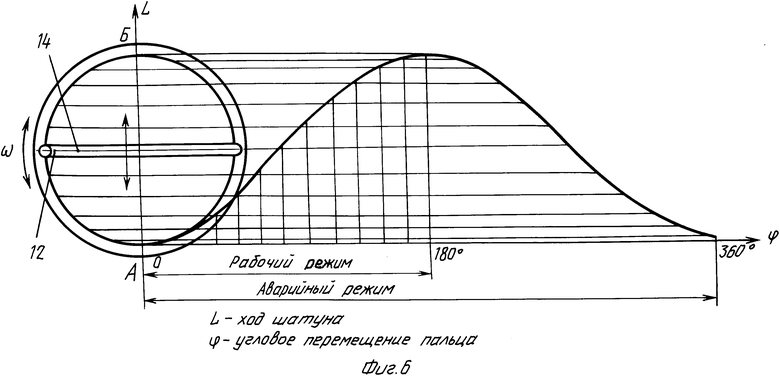
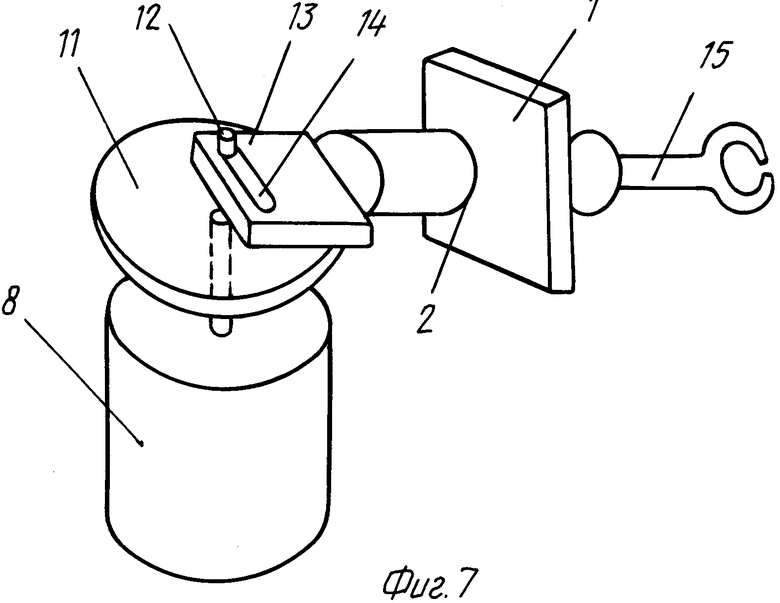
На фиг. 1 приведена функциональная блок-схема предлагаемого устройства; на фиг. 2 - сборочный чертеж, общий вид; на фиг. 3 - вид сверху на фиг. 2 без крышки; на фиг. 4 - кривошип с пальцами; на фиг. 5 - шатун с пазом; на фиг. 6 - график зависимости хода шатуна от углового перемещения пальца; на фиг. 7 - вид в аксонометрии исполнительного механизма.
Устройство содержит корпус 1 с направляющим отверстием 2 и крышкой 3, датчик положения фар 4, задатчик положения фар 5, блок формирования управляющего сигнала 6, исполнительный механизм 7, редукторный двигатель 8.
Редукторный двигатель 8 состоит из электродвигателя 9 и шестеренчатого редуктора 10, закрепленного на валу электродвигателя 9.
Исполнительный механизм 7 содержит кривошип 11 с пальцем 12, шатун 13 с пазом 14, шток 15 с приспособлением для крепления и поворота фар ввинчен в шатун 13.
Кривошип 11 с пальцем 12 закреплен на валу редукторного двигателя 8.
Шатун 13 одним концом проходит через направляющее отверстие 2, расположенное в корпусе 1, и соединен со штоком 15, второй конец с пазом 14 соединен с кривошипом 11 с помощью пальца 12, входящего в паз 14.
Задатчик положения фар 5 включает первый потенциометр 16, подвижный контакт 17 которого соединен с поворотным механизмом 18.
Датчик положения фар 4 включает второй потенциометр 19, подвижный контакт 20 которого соединен с шатуном 13.
Блок формирования управляющего сигнала 6 имеет два входа "x" и "y". На вход "x" подается напряжение И1 от задатчика положения фар 5, на вход "y" подается напряжение И2 от датчика положения фар 4. Выход блока формирования управляющего сигнала 6 подключен к электродвигателю 9. Питание на блок формирования управляющего сигнала 6, задатчик положения фар 5 и датчик положения фар 4 подается от источника постоянного тока через выключатель 21, расположенный вместе с задатчиком положения фар 5 в кабине транспортного средства. Блок формирования управляющего сигнала 6 смонтирован на плате 22.
Устройство работает следующим образом.
При включении выключателя 21 на блок формирования управляющего сигнала 6, задатчик положения фар 5 и датчик положения фар 4 подается напряжение от источника питания. Если напряжение И1, поступаемое с задатчика положения фар 5, на вход "x" равно напряжению И2, поступаемому на вход "y" от датчика положения фар 4, то на выходе блока формирования управляющего сигнала 6 и на электродвигателе 9 напряжение равно нулю. Электродвигатель 9 не вращается. Световой поток фар будет иметь определенный наклон к горизонтальной плоскости.
Установка светового потока фар в нужное положение осуществляется изменением напряжения на выходе задатчика положения фар 5 поворотным механизмом 18.
Для увеличения угла наклона светового потока фар поворотным механизмом 18 задатчика положения фар 5 увеличивают напряжение И1 на входе "x" блока формирования управляющего сигнала 6. При этом напряжение И1 становится больше напряжения И2, поступаемого от датчика положения фар 4.
На выходе блока формирования управляющего сигнала 6 и на электродвигателе 9 появится напряжение, обеспечивающее правое вращение вала редукторного двигателя. Вместе с валом вращается кривошип 11 с пальцем 12. Палец 12, вращаясь по окружности, одновременно перемещается по пазу 14 шатуна 13, сообщает ему линейное перемещение в направлении от точки А к точке Б (фиг. 6) вдоль направляющего отверстия 2.
Максимальная длина хода шатуна 13 от точки А до точки Б равна диаметру окружности, описываемой пальцем 12, при вращении кривошипа 11 в пределах от 0 до 180o.
Вместе с шатуном 13 перемещается шток 15, увеличивающий угол наклона фар, и подвижный контакт 20 потенциометра 19, увеличивающий напряжение И2 на выходе датчика положения фар 4 и на входе "y" блока формирования управляющего сигнала 6.
Шатун 13 будет перемещаться до тех пор, пока напряжение И1 будет больше напряжения И2. Как только эти напряжения сравняются, напряжение на выходе блока формирования управляющего сигнала 6 и на электродвигателе 9 станет равным нулю. Вращение вала редукторного двигателя 8 прекратится. Прекратится движение шатуна 13 и поворот фар. Световой поток фар будет направлен под определенным углом вверх к плоскости горизонта.
Аналогично происходит уменьшение угла наклона светового потока фар. Поворотным механизмом 18 уменьшают напряжение И1 на выходе задатчика положения фар 5 и на входе "x" блока формирования управляющего сигнал 6. На выходе блока формирования управляющего сигнала 6 и на электродвигателе 9 появится напряжение обратной полярности. Вал электродвигателя 9 будет вращаться в обратном (левом) направлении. Шатун 13 будет перемещаться в направлении от точки Б к точке А. Шток 15, перемещаясь, будет уменьшать угол наклона фар, а вместе с шатуном 13 будет перемещаться подвижный контакт 20 потенциометра 19. Будет уменьшаться напряжение И2 на выходе датчика положения фар 4 и на входе "y" блока формирования управляющего сигнала 6. Как только напряжение И2 станет равным И1, электродвигатель 9 обесточится, движение шатуна 13 прекратится. Угол наклона светового потока фар уменьшится и будет иметь другое заданное задатчиком положения фар 5 значение.
На фиг. 6 видно, что движение шатуна 13 в направлении от точки А до точки Б и обратно, при угловом перемещении пальца 12 в пределах от 0 до 180o, происходит с переменной скоростью, значение которой в любой промежуток определяется соотношением: ,
,
где
ΔL - приращение расстояния, пройденного шатуном;
Δϕ - приращение угла поворота пальца.
Очевидно, что вблизи крайних точек А и Б скорость движения шатуна 13 минимальна, что предотвращает возникновение ударных нагрузок на оптические элементы фар при пуске и остановке электродвигателя 9.
В аварийном режиме при отказе блока формирования управляющего сигнала 6, задатчика положения фар 5, датчика положения фар 4 электродвигатель 9 будет вращаться в одном направлении вправо или влево, при этом палец 12 совершает движение по окружности и, одновременно, перемещаясь по пазу 14, обеспечивает возвратно-поступательное движение шатуна 13 со штоком 15 в направлении от точки А к точке Б по фиг. 6 и обратно. Угол наклона светового потока фар будет постоянно изменяться от минимального до максимального значения, сигнализируя о неисправности устройства. В этом случае для установки нужного угла светового потока фар с достаточной степенью точности необходимо отключить устройство от источника питания выключателем 21 при подходе светового потока фар к нужному углу наклона.
Таким образом, используя в предлагаемом устройстве кривошип с пальцем, закрепленный на валу редукторного двигателя шатун, один конец которого проходит через направляющее отверстие корпуса и соединен со штоком, второй конец шатуна имеет паз, в который входит палец, кроме того, шатун механически соединен с датчиком положения фар, позволили обеспечить поворот фар в крайних точках с минимальной скоростью, исключающей воздействие на оптические элементы фар ударных нагрузок, возникающих при остановках и пусках электродвигателя, а в случае отказов элементов блока формирования управляющего сигнала, задатчика положения фар и датчика положения фар обеспечивается дальнейший поворот фар сверху вниз и снизу без поломки и заклинивания двигателя. Кроме того, устройство позволяет установить световой поток фар в заданное положение с достаточной степенью точности в аварийном режиме, для этого необходимо отключить источник питания выключателем при подходе светового потока фар к нужному углу наклона.
Все это повышает надежность устройства и оптических элементов фар.
Устройство просто в изготовлении, технологично. Все детали исполнительного механизма изготавливаются методом литья под давлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1994 |
|
RU2074502C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2092963C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1995 |
|
RU2076446C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2130687C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2153220C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2023343C1 |
| Устройство для загрузки бункеров топливоподач электростанций | 1982 |
|
SU1041448A1 |
| ПЕЧАТАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2074822C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2030089C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И КОНТРОЛЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЯ СУШИЛКИ ЗЕРНА С ТЕПЛОГЕНЕРАТОРОМ, РАБОТАЮЩИМ НА ТВЕРДОМ ТОПЛИВЕ | 1996 |
|
RU2117227C1 |
Изобретение относится к устройствам, предназначенным для управления положением светового потока фар транспортных средств из кабины водителя. Устройство содержит датчик и задатчик положения фар, подключенный входами к их выходам блок формирования управляющего сигнала, связанный с его выходом электродвигатель, закрепленный в корпусе, выполненном с направляющим отверстием, шестеренчатый редуктор, соединенный с валом электродвигателя и образующий с ним редукторный двигатель, укрепленный на валу этого двигателя кривошип с пальцем, ось которого параллельна оси вращения кривошипа, и шатун, выполненный с пазом на одном конце, в который входит палец кривошипа, другой конец шатуна проходит через направляющее отверстие, при этом шатун механически соединен с датчиком положения фар. 7 ил.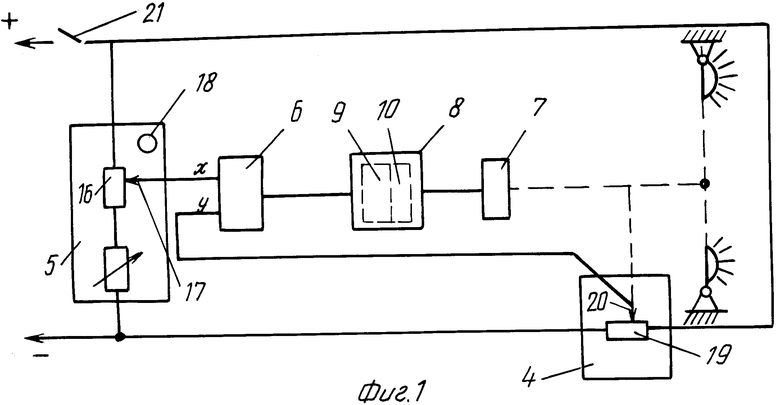
Устройство управления положением фар транспортного средства, содержащее датчик и задатчик положения фар, подключенный входами к их выходам блок формирования управляющего сигнала, связанный с его выходом электродвигатель, закрепленный в корпусе, выполненном с направляющим отверстием, отличающееся тем, что оно снабжено шестеренчатым редуктором, соединенным с валом электродвигателя и образующим с ним редукторный двигатель, укрепленным на валу этого двигателя кривошипом с пальцем, ось которого параллельна оси вращения кривошипа, и шатуном, выполненным с пазом на одном конце, в который входит палец кривошипа, другой конец шатуна проходит через направляющее отверстие, при этом шатун механически соединен с датчиком положения фар.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1181912, B 60 Q 1/12, 1994 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| JP, заявка Японии В4 N 3-80660, B 60 Q 1/076, 1991. | |||
