Изобретение относится к средствам автоматизации топливно-транспортных систем и предназначено для загрузки бункеров сырого угля на топливоподачах электростанций.
Известно устройство для загрузки бункеров топливоподач электростанций, построенное на контактных элементах 1.
Известно также устройство для автоматической загрузки бункеров топливоподач электростанций, содержащее датчики уровня, программный переключатель, реверсивный коммутатор цепей электродвигателя исполнительного механизма, источник питания, задатчик времени, ключи управления и блок сигнализации положения плужковых сбрасывателей 2.
Недостатком известных устройств является их низкая надежность.
Цель изобретения - повышение надежности работы устройства.
Указанная цель достигается тем, что устройство для загрузки бункеров топливоподач электростанций, содержащее датчик уровня, программный переключатель, реверсивный коммутатор силовых цепей электродвигателя исполнительного механизма, источник питания, задатчик времени, ключи управления и блок сигнализации положения плужковых сбрасывателей, снабжено блоком разделения сигналов, тремя блоками формирования сигнала и ограничителем кривошипа исполнительного механизма, а реверсивный коммутатор цепей электродвигателя исполнительного механизма выполнен в виде двух статических трансформаторов, первичные обмотки которых через симисторы подключены к источнику питания, а вторичные через соответствующие мостовые выпрямители и RC-цепочки соединены с цепями управления симисторов в силовых цепях электродвигателя, причем входы блока разделения сигналов подключены к выходам программного переключателя, а. выход подклю-, чен к входу первого ключа, вход первого блока формирования сигнала соединен с одним из выходов первого ключа, а выход - с одним из входов второго ключа, другой вход которого соединен с выходом второго блока формирования сигналов, вход третьего блока формирования сигнала соединен с источником питания, а выходы - соответственно с третьим и пятым ключами, вход ограничителя движения кривошипа кинематически связан с валом исполнительного механизма, а выходы подключены к входам третьего и пятого ключей и к блоку сигнализации положения плужковых сбрасывателей.
При этом ограничитель движения кривошипа выполнен в виде индуктивного преобразователя углового перемещения, подвижная часть сердечника в котором закреплена на конце выходного вала редуктора, а неподвижная выполнена цилиндрической с основанием в форме диска и установлена соосно с выходным валом редуктора, а катушки индуктивности размешены на индивидуальных сердечниках и закреплены с возможностью фиксации в различных положениях по периметру основания.
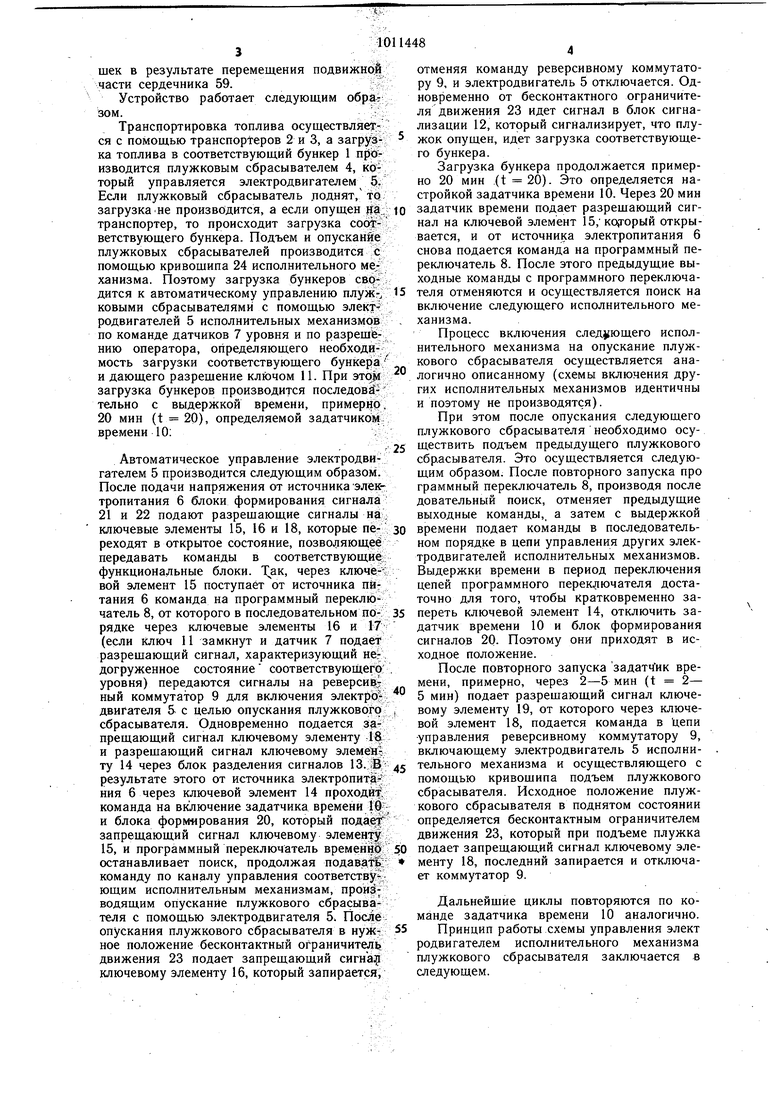
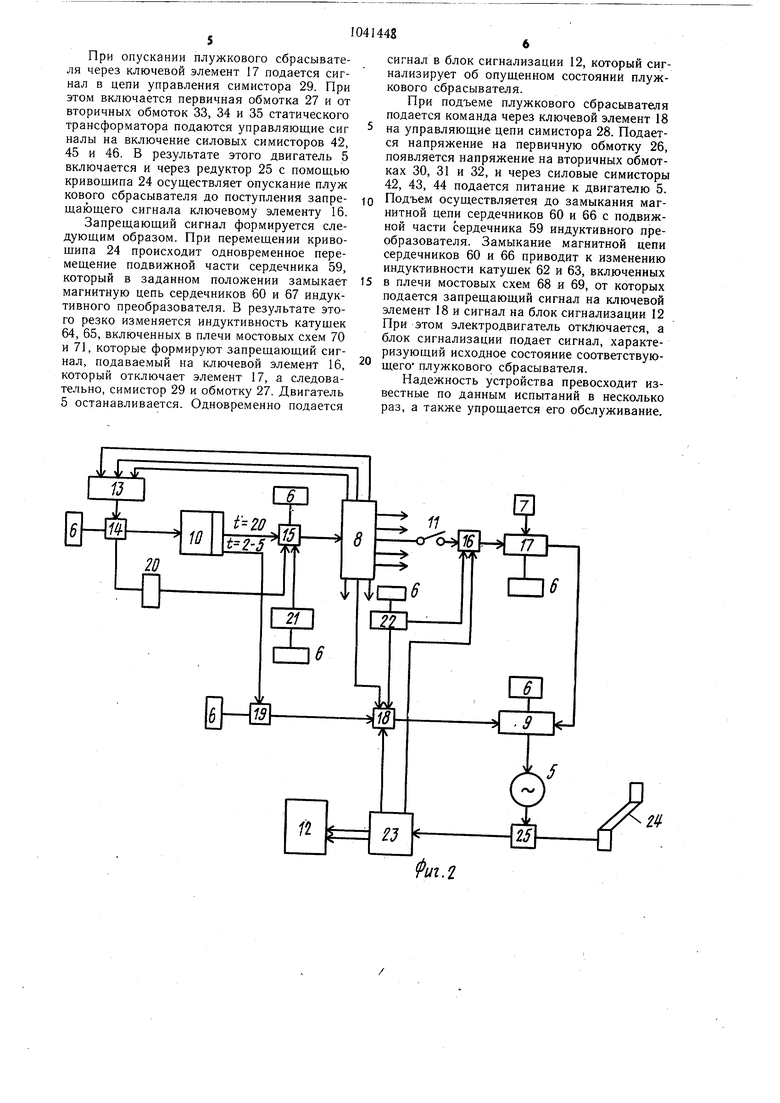
На фиг. 1 дана схема размещения технологического оборудования бункерной галереи топливоподач электростанций; Ra фиг. 2 блок-схема устройства для автоматической загрузки бункеров топливоподач электростанций; на фиг. 3 - принципиальная схема упO равления электродвигателем исполнительного механизма плужкового сбрасывателя.
Технологическое оборудование бункерной галереи включает бункеры сырого угля 1 транспортеры 2 и 3, плужковые сбрасыватели 4, управляемые при помощи электродвига теля 5 исполнительного механизма. Устройство содержит источник питания б, датчик 7 уровня, программный переключатель 8, реверсивный коммутатор 9 цепей электродвигателя исполнительного механизма, задатQ чик-времени 10, ключи 11 управления, блок сигнализации 12 положения плужковых сбра сывателей, блок разделения сигналов 13, выполненный в виде параллельно включенных выпрямителей, шесть бесконтактных ключевых элементов 14-19, три блока формирования сигнала 20-22, выполненных в виде статических трансформаторов, бесконтактный ограничитель движения 23 кривошипа 24, кинематически связанных с однооборотными валами, редуктора 25 исполниQ тельного механизма.
Реверсивный коммутатор 9 цепей включения электродвигателя 5 исполнительного механизма выполнен в виде двух статических трансформаторов, первичные обмотки которых 26 и 27 подключены к источнику электропитания через симисторы 28 и 29, а вторичные обмотки 30-32 и 33-35 подключены через выпрямители 36-38 и 39-41 к цепям управления силовых симисторов 42-46, коммутирующих цепи включения
электродвигателя. В цепи управления силовых симисторов включены также резисторы 47-49, 50-52 и конденсаторы 53-55, 56- 58, ограющие роль сглаживающих фильтров. Бесконтактный ограничитель движения кривошипа выполнен в виде индуктивного преобразователя углового перемешения, подвижная часть сердечника 59 в котором закреплена на конце выходного вала редук-, тора 25, неподвижная часть сердечника 60 выполнена цилиндрической с дисковым осQ нованием 61 и установлена соосно с выходным валом редуктора, а катущки индуктивности 62, 63 и 64, 65 размещены на индуктивных сердечниках 66 и 67 с возможностью перемещения и фиксации их в различных положениях по периметру основания.
5 Катушки индуктивности включаются в плечи блоков мостовых схем 68, 69 и 70, 71, формирующих выходные сигналы управления при изменении индуктивности катушек в результате перемещения подвижной части сердечника 59. Устройство работает следующим обраг зом. Транспортировка топлива осуществляется с помощью транспортеров 2 и 3, а загрузка топлива в соответствующий бункер 1 производится плужковым сбрасывателем 4, который управляется электродвигателем 5. Если плужковый сбрасыватель .поднят/ то загрузкаНе производится, а если опущен на. транспортер, то происходит загрузка соответствующего бункера. Подъем и опускание плужковых сбрасывателей производится с помощью кривощипа 24 исполнительного ме,ханизма. Поэтому загрузка бункеров сводится к автоматическому управлению плужковыми сбрасывателями с помощью электродвигателей 5 исполнительных механизмов по команде датчиков 7 уровня и по разрещёнию оператора, определяющего необходимость загрузки соответствующего бункера и дающего разрещение ключом 11. При этом загрузка бункеров производится последова тельно с выдержкой времени, примерно. 20 мин (t 20), определяемой задатчиком времени 10: Автоматическое управление электродвигателем 5 производится следующим образом. После подачи напряжения от источника электропитания 6 блоки формирования сигнала 21 и 22 подают разрещающие сигналы на ключевые элементы 15, 16 и 18, которые переходят в открытое состояние, позволяющее передавать команды в соответствующие функциональные блоки. , через ключевой элемент 15 поступает от источника питания 6 команда на программный переключатель 8, от которого в последовательном порядке через ключевые элементы 16 и 17 (если ключ 11 замкнут и датчик 7 подает разрещающий сигнал, характеризующий не,догруженное состояние соответствующего уровня) передаются сигналы на peBepCHBj ный коммутатор 9 для включения электродвигателя & с целью опускания плужкового сбрасывателя. Одновременно подается запрещающий сигнал ключевому элементу 18 и разрещающий сигнал ключевому элемейг: ту 14 через блок разделения сигналов 13. .В результате этого от источника электропитания 6 через ключевой элемент 14 проходит, команда на включение задатчика времени 10 и блока формирования 20, который подает запрещающий сигнал ключевому элементу 15, и программный переключатель временно останавливает поиск, продолжая подавать команду по каналу управления соответству- ющим исполнительным механизмам, произ; водящим опускание плужкового сбрасывателя с помощью электродвигателя 5. После опускания плужкового сбрасывателя в нужное положение бесконтактный ограничитель движения 23 подает запрещающий сигна ключевому элементу 16, который запирается, отменяя команду реверсивному коммутатору 9, и электродвигатель 5 отключается. Одновременно от бесконтактного ограничителя движения 23 идет сигнал в блок сигнализации 12, который сигнализирует, что плужок опущен, идет загрузка соответствующего бункера. Загрузка бункера продолжается примерно 20 мин .(t 20). Это определяется настройкой задатчика времени 10. Через 20 мин задатчик времени подает разрещающий сигнал на ключевой элемент 15, ко(горый открывается, и от источника электропитания 6 снова подается команда на программный переключатель 8. После этого предыдущие выходные команды с программного переключателя отменяются и осуществляется поиск на включение следующего исполнительного механизма. Процесс включения след ющего исполнительного механизма на опускание плужкового сбрасывателя осуществляется аналогично описанному (схемы включения других исполнительных механизмов идентичны и поэтому не производятся). При этом после опускания следующего плужкового сбрасывателя необходимо осуществить подъем предыдущего плужкового сбр1асывателя. Это осуществляется следующим образом. После повторного запуска про граммный переключатель 8, производя после довательный поиск, отменяет предыдущие выходные команды,, а затем с выдержкой времени подает команды в последовательном порядке в цепи управления других электродвигателей исполнительных механизмов. Выдержки времени в период переключения цепей программного переключателя достаточно для того, чтобы Кратковременно запереть ключевой элемент 14, отключить задатчик времени 10 и блок формирования сигналов 20. Поэтому они приходят в исходное положение. После повторного запуска задат ик времени, примерно, через 2-5 мин (t 2- 5 мин) подает разрещающий сигнал ключевому элементу 19, от которого через ключевой элемент 18, подается команда в Цепи управления реверсивному коммутатору 9, включающему электродвигатель 5 исполнительного механизма и осуществляющего с помощью кривощипа подъем плужкового сбрасывателя. Исходное положение плужкового сбрасывателя в поднятом состоянии определяется бесконтактным ограничителем движения 23, который при подъеме плужка подает запрещающий сигнал ключевому элементу 18, последний запирается и отключает коммутатор 9. Дальнейщие циклы повторяются по команде задатчика времени 10 аналогично. Принцип работы схемы управления элект родвигателем исполнительного механизма плужкового сбрасывателя заключается в следующем.
При опускании плужкового сбрасывателя через ключевой элемент 17 подается сигнал в цепи управления симистора 29. При этом включается первичная обмотка 27 и от вторичных обмоток 33, 34 и 35 статического трансформатора подаются управляющие сиг налы на включение силовых симисторов 42, 45 и 46. В результате этого двигатель 5 включается и через редуктор 25 с помощью кривошипа 24 осуществляет опускание плуж кового сбрасывателя до поступления запрещающего сигнала ключевому элементу 16.
Запрещающий сигнал формируется следующим образом. При перемещении кривошипа 24 происходит одновременное перемещение подвижной части сердечника 59, который в заданном положении замыкает магнитную цепь сердечников 60 и 67 индуктивного преобразователя. В результате этого резко изменяется индуктивность катущек 64, 65, включенных в плечи мостовых схем 70 и 71, которые формируют запрещающий сигнал, подаваемый на ключевой элемент 16, который отключает элемент 17, а следовательно, симистор 29 и обмотку 27. Двигатель 5 останавливается. Одновременно подается
сигнал в блок сигнализации 12, который сигнализирует об опущенном состоянии плужкового сбрасывателя.
При подъеме плужкового сбрасывателя подается команда через ключевой элемент 18
на управляющие цепи симистора 28. Подается напряжение на первичную обмотку 26, появляется напряжение на вторичных обмотках 30, 31 и 32, и через силовые симисторы 42, 43, 44 подается питание к двигателю 5.
Подъем осуществляется до замыкания магнитной цепи сердечников 60 и 66 с подвижной части сердечника 59 индуктивного преобразователя. Замыкание магнитной цепи сердечников 60 и 66 приводит к изменению индуктивности катущек 62 и 63, включенных
в плечи мостовых схем 68 и 69, от которых подается запрещающий сигнал на ключевой элемент 18 и сигнал на блок сигнализации 12 При этом электродвигатель отключается, а блок сигнализации подает сигнал, характеризующий исходное состояние соответствующего плужкового сбрасывателя.
Надежность устройства превосходит известные по данным испытаний в несколько раз, а также упрощается его обслуживание.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ | 1973 |
|
SU389509A1 |
| Устройство для автоматической загрузки материала в бункера | 1979 |
|
SU889577A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ БУНКЕРОВ | 1971 |
|
SU298926A1 |
| Система автоматического управления загрузкой бункеров | 1975 |
|
SU553593A1 |
| Система управления трактом топливоподачи | 1985 |
|
SU1312541A1 |
| Устройство для управления периодической загрузкой бункеров | 1981 |
|
SU990286A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство для управления загрузкой бункеров | 1990 |
|
SU1738744A1 |
| Устройство для автоматического загрузки бункеров топливом | 1972 |
|
SU487825A1 |
| Устройство для управления загрузкой бункеров | 1980 |
|
SU895847A1 |
1. УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ БУНКЕРОВ ТОПЛИВОПОДАЧ ЭЛЕКТРОСТАНЦИЙ, содержащее датчик уровня, программный переключатель, реверсивный коммутатор силовых цепей электродвигателя исполнительного механизма, источник питания, задатчик времени, ключи управления и блок сигнализации положения плужковых сбрасывателей, отличающееся тем, что, с целью повышения надежности, оно снабжено блоком разделения сигналов, тремя блоками формирования сигнала и ограничителем кривошипа исполнительного механизма, а реверсивный коммутатор цепей электродвигателя исполнительного механизма выполнен в виде двух статических трансформаторов, первичные обмотки которых , через симисторы подключены к источнику питания, а вторичные через соответствующие мостовые выпрямители и RC-цепОчки соединены с цепями управления симисторов в силовых цепях электродвигателя, причем входы блока разделения сигналов подключены к выходу программного переключателя, а выход подключен к входу первого ключа, вход первого блока формирования сигнала соединен .с одним из выходов первого ключа, а выходс одним из входов второго ключа, другой вход которого соединен с выходом второго : блока формирования сигнала, вход третьего бдока формирования сигнала соединен с источником питания, а выходы - соответственно с третьим и пятым ключами, вход ограничителя движения кривошипа кинематически связан с валом исполнительного механиз, ма, а выходы подключены к входам третьего и пятого ключей и к блоку сигнализации поI ложения плужковых сбрасывателей. .-у 2. Устройство по п. 1, отличающееся тем, (Л что ограничитель движения кривошипа выCZ полнен в виде индуктивного преобразователя углового перемещения, подвижная часть сердечника в котором закреплена на конце выходного вала редуктора, а неподвижная выполнена цилиндрической с основанием в форме диска и установлена соосно с выходным валом редуктора, а катушки индуктивности размещены на индивидуальных сердечниках и закреплены с возможностью фиксации в различных положениях по периметру основания. «iU 4 00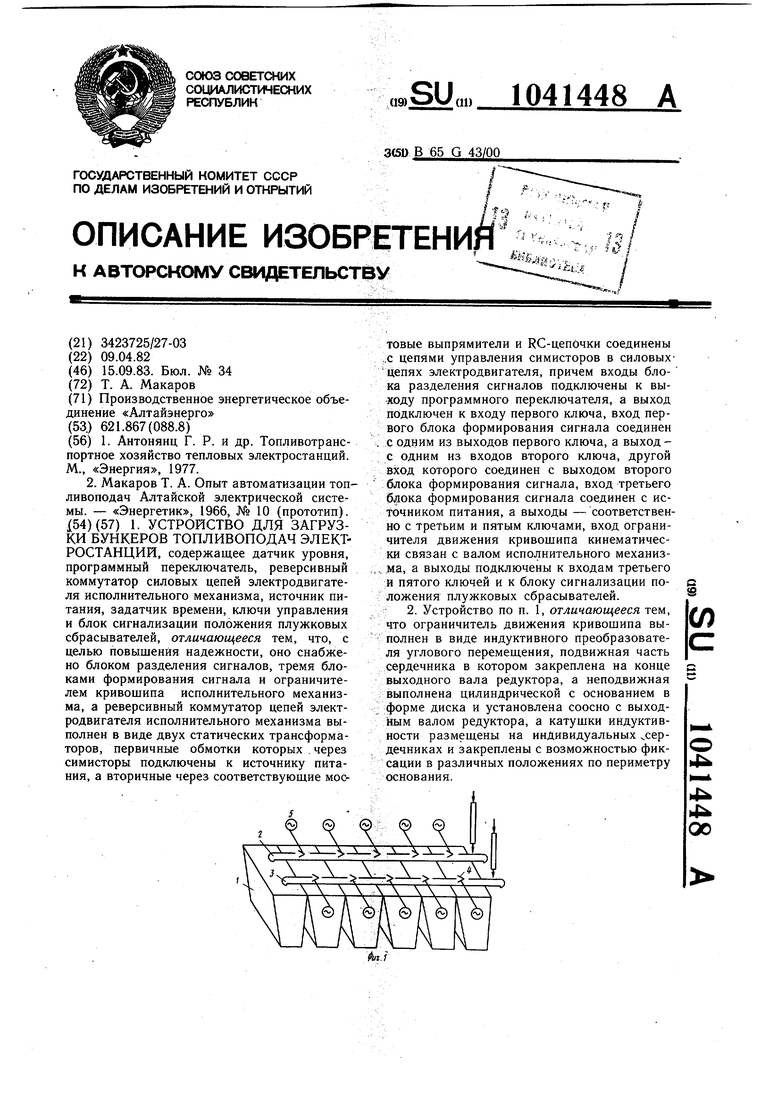
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Антонянц Г | |||
| Р | |||
| и др | |||
| Топливотранспортное хозяйство тепловых электростанций | |||
| М., «Энергия, 1977 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Макаров Т | |||
| А | |||
| Опыт автоматизации топливоподач Алтайской электрической системы | |||
| - «Энергетик, 1966, № 10 (прототип) | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
