Изобретение относится к воздухоплаванию и может быть использовано при разработке дельтопланов, планеров, управляемых воздушных шаров и других аналогичных летательных аппаратов, преимущественно спортивного назначения.
Известен способ осуществления полета физического тела в воздухе, связанного с аэродинамической поверхностью. Он заключается в том, что аэродинамической поверхности придается специальная форма (форма крыла самолета, форма дельтоплана или воздушного змея и т.п.), позволяющая получить с помощью этой поверхности подъемную силу.
Недостатком рассмотренного способа является то, что полет, осуществляющий этот способ, очень ограничен во времени, так как начальная потенциальная энергия быстро истрачивается. Дельтоплан теряет свою горизонтальную скорость и приземляется.
Известен также способ по заявке СССР N 4444435/23 от 24.05.88 г. автора Быкова Ю. А, но этот способ отклонен патентным ведомством РФ по критерию "техническое решение задачи" и не признан изобретением.
Наиболее близким по технической сущности к предлагаемому способу является способ (авт. св. СССР N 1066137б кл.B 64 C 23/06 опублик.15.11.90). Способ по этому авторскому свидетельству предлагает обеспечивать аэродинамическим поверхностям летательного аппарата колебания относительно номинальной траектории полета. Эти колебания осуществляется путем изменения аэродинамических сил и при этом производятся колебания части летательного аппарата с частотой, равной частоте колебаний аэродинамических поверхностей, но с опережением по фазе на угол ϕ , выбираемый в зависимости от потребной мощности в пределах:
π/2 < ϕ < π .
Недостатком способа по авт. св. СССР N 1066137 является то, что он не применим для летательных аппаратов при их вертикальных движениях вверх или вниз без одновременных горизонтальных перемещений. Кроме того, реализация способа по авт. св. N 1066137 связана с существенными конструктивными трудностями, так как требует применения кроме двигателя, вращающего тянущий винт, еще двух генераторов механических колебаний. Один из этих генераторов должен приводить в колебания аэродинамические поверхности, а другой - оттягивать или отталкивать часть летательного аппарата. Должно быть также устройство, осуществляемое сдвиг по фазе колебания этих генераторов и обеспечивающее равенство частот колебаний обоих генераторов. Это дополнительно увеличивает технические трудности реализации способа по авт. св. N 1066137.
Сущность предлагаемого способа заключается в том, что с целью уменьшения затрат энергии для поддержания полета физического тела, связанного с горизонтальной уравновешенной в воздушной атмосфере аэродинамической поверхностью, а также для обеспечения возможности их совместного перемещения вверх и вниз, силу взаимодействия между физическим телом (далее ФТ) и аэродинамической поверхностью (далее АП) периодически то скачкообразно уменьшают до величины F1, то скачкообразно увеличивают до величины F2, выполняя условия, что F2 > F1, F2 > P+F1 и F2≤ Fдоп, где F2 и F1 - наибольшая и наименьшая сила взаимодействия между АП и ФТ; P - сила тяжести ФТ, а Fдоп - допустимая сила нагрузки на АП по условиям ее механической прочности. При этом, уменьшая силу взаимодействия между ФТ и АП, предоставляют ФТ возможность ускоренно перемещаться вниз относительно АП с изменением скоростей перемещения от 0 до V1, превращая действием силы P=F1 потенциальную энергию ФТ в кинетическую энергию движения, затем силу взаимодействия резко увеличивают до величины F2 и производят этой силой торможение движения ФТ относительно АП от скорости V1 до 0 и, преобразуя при этом кинетическую энергию ФТ в другой ее вид (например, в потенциальную энергию сжатой пружины), затем накопленную таким образом энергию расходуют на придание ФТ ускоренного движения вверх с изменением скорости от 0 до V2 путем воздействия на ФТ силой F2. После этого уменьшают силу взаимодействия ФТ и АП до величины F1, предоставляя возможность ФТ под действием этой силы +P двигаться вверх, замедляя свою скорость от V2 до 0, относительно АП и этим, превращая кинетическую энергию ФТ в потенциальную, а затем все процессы повторяют, при этом, с целью обеспечения непрерывности этих периодических процессов, в каждом периоде для компенсации потерь энергии при ее преобразованиях в моменты ускоренного движения ФТ вверх от дополнительного источника энергии на ФТ воздействуют импульсом силы Fи одинакового направления с движением ФТ и такой величины, чтобы выполнялось условие V2 ≥ V1.
Под физическим телом (ФТ) подразумевается тело, которое имеет массу и форму, что сила его аэродинамического сопротивления при движении в воздухе со скоростями V1 и V2 имеет пренебрежительно малое значение по сравнению с силами F1 и F2.
Под аэродинамической поверхностью (АП) подразумевается конструкция, имеющая большую поверхность и обладающая большим аэродинамическим сопротивлением в воздушной среде при ее движении в перпендикулярной к ней направлении, достаточным для того, чтобы под воздействием приложенной к ней силы F2 эта конструкция смещалась существенно меньше, чем смещение физического тела, под воздействием этой же силы.
При воздействии на ФТ сначала силы P+F1, направленной вниз, оно движется равноускоренно. Поскольку сила F1 является силой взаимодействия с АП, то на АП по третьему закону Ньютона действует сила, равная -F1, направленная вверх. Эта сила противоположна по направлению силе тяжести АП, что равносильно уменьшению веса АП на время движения вниз ФТ. Если сила -F1 превышает вес АП хотя бы на небольшую величину, то АП с малой скоростью будет перемещаться вверх, что равносильно действию подъемной силы. После воздействия на ФТ силы P+F1 и достижения им скорости V1, на него воздействует тормозящей силой F2, существенно превосходящей P+F1. Сила F2 направлена вверх и она является силой взаимодействия с АП. Поэтому на АП действует сила, равная -F2, но направленная вниз. Следовательно, АП будет стремиться сместиться вниз. Однако время действия силы F2 во много раз меньше, чем время действия силы P+F1 и могут быть созданы условия, когда смещения АП вверх под действием силы -F1 будут превосходить смещения АП вниз под действием силы -F2. Это объясняется тем, что при кратковременном действии силы -F2 под АП образуется плотный слой воздуха. Этим достигается эффективное использование АП как средства, противодействующего движению системы вниз. Преобразование потенциальной энергии ФТ в кинетическую, а затем посредством промежуточного преобразования - снова в кинетическую энергию движения ФТ вверх дает возможность экономно использовать энергию для поддержания полета. Экономия достигается тем, что энергия вводится в систему для компенсации потерь при ее преобразованиях синхронно с колебаниями физического тела и таким образом в предлагаемом способе используется явление резонанса.
Движения с использованием явления резонанса являются одним из самых энергетически экономных процессов.
Таким образом в отличии от способа по авт. св. N 1066137 предлагаемый способ может быть применен как для летательных аппаратов, двигающихся горизонтально, так и для вертикально спускающихся летательных аппаратов (например, для парашютных систем). При его применении в последнем случае система будет то увеличивать скорость своего снижения при действии силы F2, либо уменьшать при действии силы F1. Средняя скорость снижения будет меньшей, чем для ранее известных систем.
В отличие от способа по авт. св. N 1066137 в предлагаемом способе нет необходимости поддерживать колебания АП с частотой, равной колебаниям ФТ, а также регулировать сдвиг фаз между этими колебаниями.
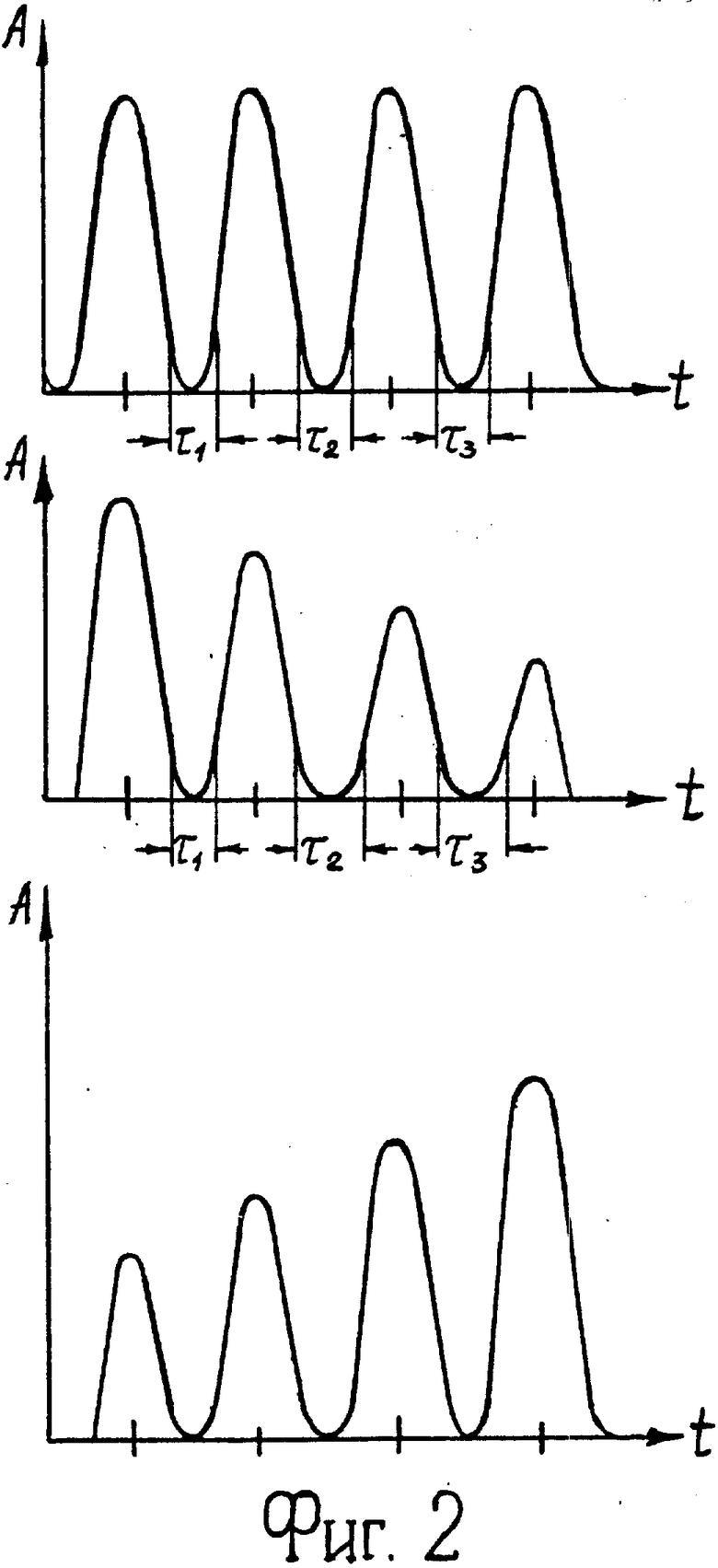
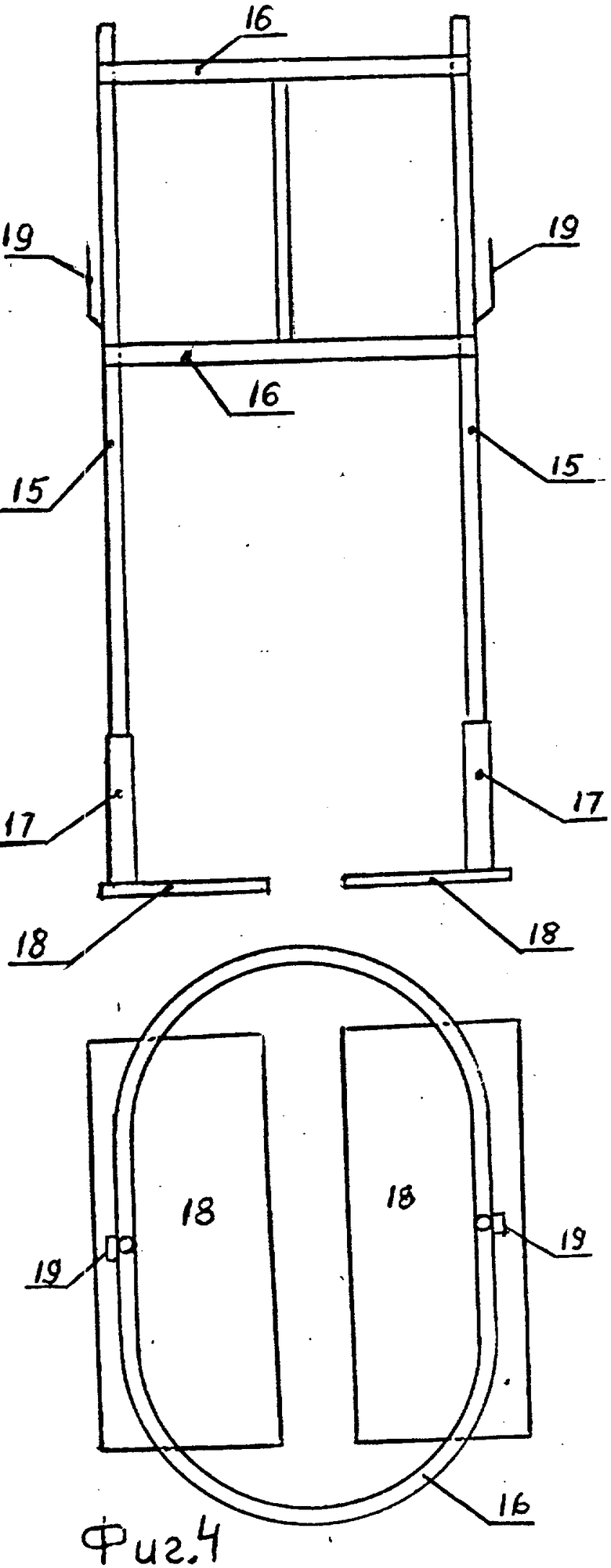
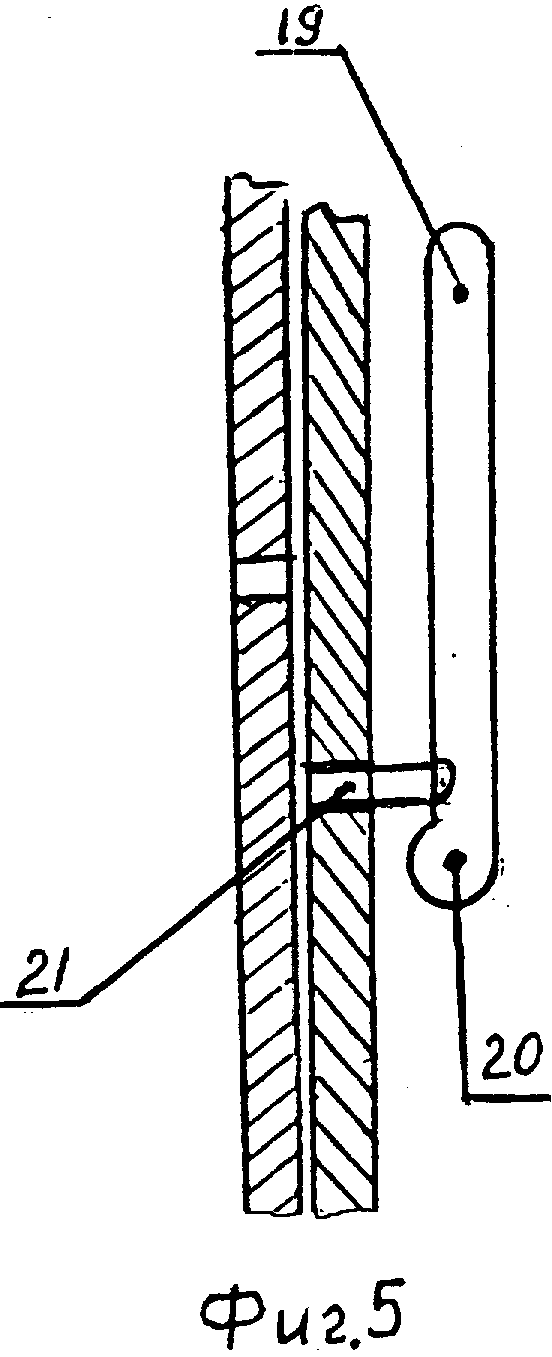
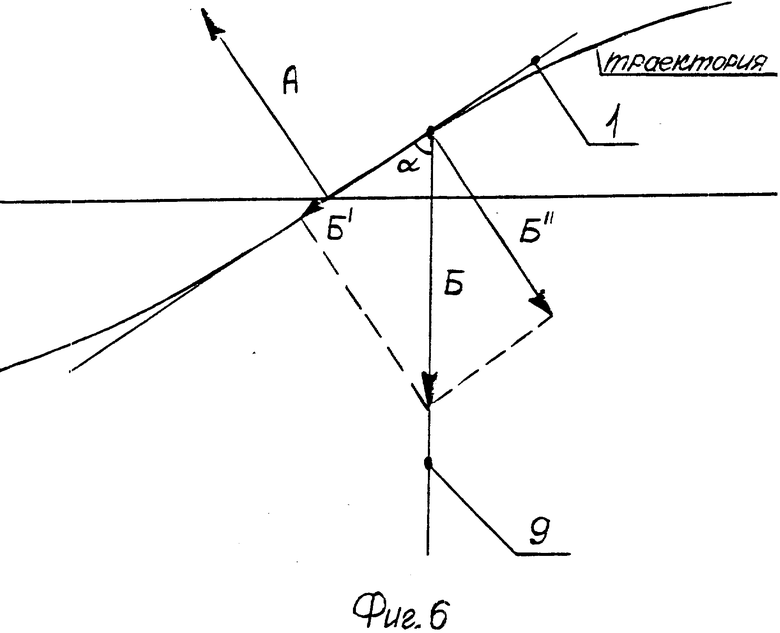
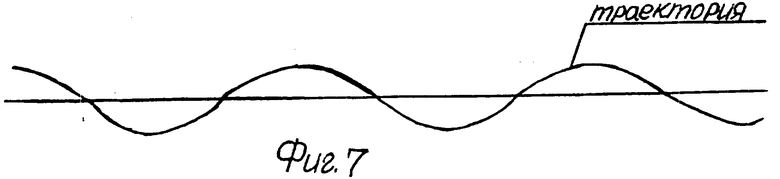
На фиг. 1 поясняется сущность предлагаемого способа; на фиг. 2 даны графики движения в трех режимах; на фиг. 3 - возможный вариант летательного аппарата (общий вид); на фиг. 4 и 5 - отдельные узлы летательного аппарата (каретки и устройство тормоза); на фиг. 6 - диаграмма действующих на опорную поверхность сил в виде векторов и их составляющих; на фиг. 7 - рекомендуемая траектория движения предлагаемого аппарата.
Для упрощения пояснений преобразования энергии ФТ под действием силы P+F1 целесообразно условно назвать верхним преобразованием, а преобразования энергии ФТ под действием силы F2 соответственно - нижним преобразованием. Известно, что величина затрачиваемой энергии в режиме резонансных колебаний зависит от КПД при преобразованиях поддерживаемой энергии. Желательно, чтобы этот КПД был близок к единице (100%). Такое преобразование может быть осуществлено (хотя бы во время верхнего преобразования) при условии, если сила F1 равна нулю. Тогда верхнее преобразование будет осуществляться только под воздействием силы тяжести P и положительные свойства предлагаемого способа будут более наглядны, а расчеты, доказывающие реализуемость и полезность его применения, будут более просты. Такой случай применения способа целесообразен, когда сила тяжести АП мала по сравнению с весом ФТ. Последующий расчет будет произведен для этого случая.
Допустим, что имеется свободно парящая в воздушной среде аэродинамическая поверхность 1, расположенная в воздушной атмосфере горизонтально (фиг. 1). Она связана через элемент связи 2 с физическим телом 3, на котором имеется преобразователь энергии 4. В качестве последнего, например, может быть применена пружина с источником энергии для компенсации потерь при ее преобразованиях. Для организации скачкообразного изменения силы взаимодействия ФТ с АП на нижнем конце элемента связи 2 имеется упор 5. (Преобразователь энергии 4 может быть расположен также и у элемента 5 или в другом месте). Кроме того, между АП и ФТ может быть дополнительный преобразователь энергии (не показан).
Предположим, что ФТ (поз. 3) сначала находится в верхней точке элемента связи 2. Если ФТ закреплено в этой точке, то сила взаимодействия его с АП равна весу ФТ. При устранении закрепления под действием силы тяжести ФТ устремится вниз, двигаясь равноускоренно. В момент времени, когда его скорость достигнет сравнительно большой величины, равной V1, силу взаимодействия резко увеличивают до величины F2 и этой силой осуществляют торможение ФТ. При этом с помощью силы F2 начинают преобразовывать кинетическую энергию ФТ в другой вид энергии. Такое преобразование может осуществляться преобразователем энергии 4, в качестве которого, в частности, может служить пружина. Сжимаясь, пружина поглощает кинетическую энергию ФТ, а затем при ее разжимании накопленная энергия возвращается физическому телу в виде кинетической энергии движения, направленного вверх. Поскольку процесс нижнего преобразования энергии производится в возможно короткое время он начинается при сравнительно большой скорости движения ФТ, то АП испытывает нагрузку, близкую к ударной. Под АП образуется плотный слой воздуха, препятствующий движению всей системы вниз и позволяющий изменить направление движения физического тела на противоположное. При идеальном преобразователе энергии (элемент 4), за который принимается преобразователь без потерь, ФТ должно возвратиться в исходную точку. Этот случай отражен на верхнем графике (фиг. 2). Буквами τ1, τ2 и τ3 обозначены отрезки времени, при которых происходит нижнее преобразование энергии. Амплитуда колебаний ФТ при идеальном преобразовании не изменяется. Однако идеальных преобразований энергии не существует. Поэтому для поддержания амплитуды колебаний ФТ, неизменной в течение времени полета, необходимо компенсировать потери в преобразователе энергии 4. Для этого каждый раз в момент, когда ФТ начинает движение вверх под воздействием силы F2, к нему прилагается компенсирующая сила FИ по направлению вверх, достаточная для того, чтобы компенсировать потери энергии при преобразованиях. Для создания компенсирующей силы необходим дополнительный источник энергии достаточной мощности. Если дополнительная энергия недостаточна, то амплитуда колебаний ФТ (поз. 3) имеет затухающий характер. Этот режим представлен на среднем графике (фиг. 2).
Наиболее важным режимом предлагаемого способа является режим, при котором в резонансную систему, образованную элементами 1 - 4, вводится энергия, превышающая энергию потерь в преобразователе 4. В этом случае амплитуда колебаний ФТ будет увеличиваться и может достигнуть такой величины, что ФТ в верхнем своем положении будет воздействовать на АП и отдавать ей часть своей энергии в виде силы, толкающей ее вверх. Для этого может быть использован дополнительный преобразователь энергии, аналогичный по своему устройству преобразователю 4, но осуществляющий преобразование энергии при существенно меньшей силе, чем это имеет место в преобразователе 4. Поскольку эта сила направлена вверх, то будет достигнут эффект, равносильный созданию подъемной силы
Во всех трех режимах (фиг. 2) для поддержания полета ФТ или для увеличения времени полета требуется меньшая энергия, чем в ранее известных способах.
Произведем ориентировочные расчеты, исходя из данных, близких к реальным.
Предположим, что:
площадь АП (поз. 1) S=20 м2;
длина элемента связи (поз. 2) h=4 м;
вес ФТ P=75 кг;
преобразователь энергии 4 (пружина с цилиндром и поршнем внутреннего) имеет рабочий ход X=0,03 м (F2=1•10•5H).
Из этих данных могут быть выведены промежуточные параметры системы, по которым ориентировочно можно оценить необходимую энергию для поддержания полета летательного аппарата, использующего предлагаемый способ.
1. Скорость движения ФТ (поз.3) в момент соприкосновения его с элементами 5 (V1 и равная ей V2): ;
;
2. Средняя скорость торможения ФТ (от максимума до 0) относительно АП; ;
;
3. Время поглощения энергии преобразователем 4; ;
;
4. Время выделения энергии преобразователем 4;
tвыд = tпогл = 0,007 с;
5. Общее время воздействия ФТ на АП:
tобщ = tпогл + tвыд = 0,014 с
6. Известно, что воздушная атмосфера обладает упругими свойствами. Это подтверждается, в частности, ее способностью хорошо распространять звуковые и сверхзвуковые волны, которые являются механическими колебаниями молекул воздуха (Мэрион Дж. Б. , Физика и физический мир, М.: Мир, 1975, с. 323). Период колебаний сверхзвуковых и звуковых волн лежит в пределах от 10•10-4с до 0,1 (этим периодам соответствуют частоты колебаний 100 кГц - 10 Гц). Поэтому, если на АП воздействовать силой в течение времени, соизмеримом с периодом звуковых колебаний (в соответствии с п.5 расчета это время равно 0,014 с), то воздушную среду следует считать упругой.
Определим сначала коэффициент упругости "К" рассматриваемой системы при ударном воздействии ФТ на АП непосредственно в предположении, что пружина преобразователя энергии (поз. 4) отсутствует. В этом случае преобразование кинетической энергии ФТ осуществляется непосредственно воздушной атмосферой, так как она обладает упругими свойствами и, следовательно, может рассматриваться сама как пружина, воздействующая на АП.
Коэффициент упругости системы АП плюс воздушная атмосфера равен: ,
,
где
F-сила, воздействующая на АП,
Xлин-линейное смещение АП (там же, с. 311).
Предположим, что АП является абсолютно жесткой конструкцией. Тогда при ударном воздействии ФТ на АП над АП образуется вакуум (теоретически). Поэтому снизу на АП воздействует сила F, равная произведению атмосферного давления на площадь АП, т.е.
F = 10000•20 = 200000 кгс ≅ 2•106H; ;
линейный участок движения АП вниз (под воздействием удара ФТ) может быть определен следующим образом.
Известно, что характерное расстояние между молекулами воздуха равно 3,5•1--7 см (3,5•10-9м) (там же, с. 231) Известно также, что предельная плотность воздуха может быть увеличена не более чем в 6 раз (Рахматуллин Х.А. и др., газовая динамика -М.; Высшая школа, 1965, с. 201). Следовательно, смещение АП по линейному закону будет осуществляться на участке равном:
Xлин=3,5•10-9:6=19•10-9м.
Тогда  ;
;
При введении в рассматриваемую систему преобразователя энергии 4 в виде пружины с коэффициентом упругости по величине намного меньшим, чем 1•1014, кинетическая энергия ФТ будет распределена пропорционально этим коэффициентам упругости. Поэтому энергия ФТ в большей своей части будет поглощаться в преобразователе энергии, а затем отдаваться физическому телу.
Приведенные расчеты сделаны относительно идеализированной системы АП в предположении, что она является абсолютно жесткой. Реальная система будет приближаться к идеальной в большей или меньшей степени в зависимости от конструктивных ее особенностей. Однако во всех случаях для реальной АП характер рассмотренных процессов будет сохраняться.
6. Время движения ФТ вниз - Твн:
7. Время движения ФТ вверх - Твв:
Твв = Твн = 0,91с
8. Период колебательного движения ФТ:
Тобщ = Твв + Твн + tобщ = 1,82 с;
9. Период колебаний АП по формуле  (см. упомянутый источник Мэрион Дж.Б. с. 315); при mап = 25 кг; (mап и mфт - массы АП и ФТ);
(см. упомянутый источник Мэрион Дж.Б. с. 315); при mап = 25 кг; (mап и mфт - массы АП и ФТ);
10. Требуемая мощность для поддержания вертикального полета при предположении величины потерь, равных 30% от исходной, в каждом периоде колебаний ФТ (мощность импульса Fн):
Требуемая мощность:
11. Мощность ранее известного летательного аппарата (вертолета), необходимого для поддержания груза с m=75 кг и с площадью охвата винтом, равной 20м2: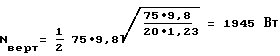
(по формуле см. Стасенко А.Л. Физика полета, М.: Наука, 1977, с. 136).
12. Выигрыш по мощности предлагаемого способа по сравнению с ранее известным:
Таким образом расчет показывает, что для удержания системы массой 75 кг при применении предлагаемого способа требуется мощность 483 Вт. Этот расчет выполнен для летательного аппарата, не имеющего скорости движения в горизонтальном направлении. Известно, что для поверхности, имеющей определенную форму (например, форму дельтоплана), при ее движении вдоль горизонта для удержания высоты требуется в несколько раз меньшая энергия, чем для поверхности, не имеющей горизонтальной скорости. Поэтому в качестве примера для реализации предлагаемого способа может быть использовано устройство (летательный аппарат) в котором АП имеет движение вдоль горизонта.
Летательный аппарат во многом по устройству может быть аналогичен обычному дельтоплану. Аэродинамический поверхностью служит купол дельтоплана 6 (фиг. 3), укрепленный килевой трубой 7 и поперечной трубой 8, отнесенной несколько назад относительно центра опорной поверхности 6. К этой трубе короткой стороной прикреплена прямоугольная рама 9, имеющая наклон вперед под углом α относительно килевой трубы 7. На раме 9 имеется каретка 10, которой обеспечена возможность перемещаться вдоль длинных сторон рамы 9 вниз и вверх. Внизу рамы 9 размещен преобразователь энергии 11. Килевая труба 7 имеет длину большую, чем купол дельтоплана 6. В середине этой трубы установлена мачта 12, а к переднему и заднему ее концам прикреплены горизонтально расположенные дополнительные поверхности 13. Концы труб 7 и 8, рамы 9 и мачты 12 стянуты тросиком 14 и этим обеспечивается прочность всей конструкции летательного аппарата, а также ее жесткость. Каретка 10 (фиг. 4) состоит из двух труб 15, надетых на боковые трубы рамы 9. Трубы каретки скреплены двумя вытянутыми кольцами 16. На трубах 15 расположены трубы 17, к которым снизу прикреплены подножки 18. Трубы 17 могут перемещаться по трубам 15 вдоль, но эти перемещения ограничены пазами и шпонками (на чертеже не показаны), предотвращение трубы 17 от вращательных движений относительно труб 15 каретки. На расстоянии примерно равном 1,5 м от подножек 18 к трубам каретки прикреплены рукоятки тормозов 19 (фиг. 5), вращающиеся относительно осей 20 и приводящие в движение штифты 21, продетые через отверстия в трубах 15 каретки 10.
Предлагаемый летательный аппарат работает следующим образом.
В исходном состоянии каретка 10 находится в нижнем положении. Устройство размещается для старта на вершине горы перед крутым склоном. Дельтопланерист с помощью помощников разгоняет аппарат до склона и далее осуществляет полет. На аэродинамическую поверхность начинает действовать подъемная сила. Дельтопланерист размещается внутри колец 16 на подножках 18. Затем но вместе с кареткой 10 подпрыгивает вверх. Достигнув некоторой высоты, он под действием силы тяжести перемещается вниз и падает на преобразователь энергии 11, в качестве которой может быть применена пружина. В этот момент сила взаимодействия между ФТ (масса дельтопланериста) и АП резко возрастает и под действием этой силы начинается замедленное движение дельтопланериста. Аэродинамическая поверхность под действием резко возросшей силы начинает колебательные движения с частотой, зависящей от конструкции летательного аппарата. Преобразователь энергии начинает преобразовывать кинетическую энергию дельтопланериста в потенциальную энергию сжимаемой пружины. При этом приваренные к подножкам 18 трубы 17 скользят по трубам 15 и таким образом обеспечивается возможность дельтопланеристу согнуть ноги и приготовиться к следующему прыжку вверх. Толчок для прыжка осуществляется в момент, когда пружины преобразователя энергии разжимаются и отдают накопленную в них энергию для движения каретки с дельтопланеристом вверх. Этим обеспечивается синхронизация колебательных движений дельтопланериста с вводимой в систему энергией, т.е. обеспечивается явление резонанса. Далее все процессы повторяются. Одновременно с описанными процессами происходят следующие изменения положения опорной поверхности относительно линии горизонта. Поскольку опорная рама 9 расположена относительно опорной поверхности под углом α , то при движении катерки 10 вниз эта поверхность стремится изменить угол атаки в отрицательную сторону относительно линии горизонта до значения, равного углу (90o - α ). В момент достижения кареткой нижней точки на опорную поверхность будут действовать представленные векторами следующие силы (фиг. 6): вектор А, направленный перпендикулярно опорной поверхности 1 и приложенный к ее центру, а также вектор Б, направленный вдоль рамы вниз. Вектор Б можно разложить на векторы: Б', направленный вдоль поверхности 1, и Б'', направленный перпендикулярно к ней. Вектор А представляет из себя равнодействующую всех сил, образованных давлением воздуха на аэродинамическую поверхность снизу. Вектор Б' направлен вдоль движения опорной поверхности и он увеличивает горизонтальную скорость ее движения и кинетическую энергию все системы (летательного аппарата). Вектор Б'', поскольку он приложен сзади центра опорной поверхности, образует с вектором А пару вращательных сил, стремящихся повернуть опорную поверхность по часовой стрелке. При этом угол атаки будет изменяться в сторону положительных значений относительно горизонта. Скорость изменения этого угла может быть при необходимости увеличена (или уменьшена) дельтопланеристом путем перемещения центра тяжести своего тела. Таким образом обеспечивается при наибольшей силе взаимодействия массы дельтопланериста и аэродинамической поверхностью - угол атаки отрицательный, а при наименьшей силе взаимодействия угол атаки становится положительным. В первом случае скорость дельтоплана увеличивается и этим увеличивается кинетическая энергия системы. Во втором случае при положительных углах атаки кинетическая энергия системы несколько уменьшается путем перехода ее в потенциальную энергию. При этом высота полета увеличивается. Траектория полета предлагаемого летательного аппарата приведена на фиг. 7. Волнообразное движение позволяет использовать опорную поверхность 1 как эффективный движитель системы. Дополнительные поверхности 13 обеспечивают лучшую устойчивость системы, противодействуя вращающему моменту сил, который возникает, когда дельтопланерист с кареткой 10 находится в нижней части рамы 9. Рукоятка тормоза 19 дает возможность дельтопланеристу при необходимости уменьшить скорость движения каретки 10 по трубам рамы 9. Для этого он может нажать на рычаг 19, который, повернувшись вокруг оси 20, надавит на штифт 21, находящийся в отверстии в стенке трубы 15 и приведет его в соприкосновение со стенкой трубы рамы 9 (фиг. 5). Этим достигается резкое торможение движения каретки 10 относительно рамы 9. Кроме того, в некоторых местах, например в самой верхней точке движения каретки, может быть осуществлена фиксация положения каретки 10. Для этого в стенке трубы рамы 9 имеются отверстия, в которые может быть вдвинут штифт 21 и осуществить фиксацию. В этом случае дельтопланерист может осуществлять полет как на обычном дельтоплане.
Управление летательным аппаратом осуществляется следующим образом.
При необходимости изменения движения вправо дельтопланерист при осуществлении прыгающих движений действует в большей степени правой ногой, чем левой. Этим обеспечивается большая нагрузка на правое крыло купола дельтоплана 6 и этим достигается его большее снижение и скольжение аппарата вправо (правый поворот). Для осуществления левого поворота дельтопланерист действует аналогичным образом левой ногой. Для изменения угла атаки дельтопланерист может перенести центр тяжести своего тела на переднюю, либо на заднюю части подножек 13. В соответствии с заложенным в предлагаемом устройстве способом дельтопланерист должен производить отталкивание одновременно с разжиманием пружин 11. В этом случае будет иметь место явление резонанса, характеризующееся тем, что при малых затратах энергии будет достигаться наибольшая амплитуда движений каретки 10 с дельтопланеристом и наиболее экономичный в энергетическом отношении режим работы предлагаемого летательного аппарата.
Применение предлагаемого летательного аппарата позволит дельтопланеристу находиться большее количество времени в полете, так как в нем предусмотрено эффективное использование энергии самого дельтопланериста для продления полета. Дальнейшее развитие техники такого полета дает возможность решать многие практические задачи, например преодоление различных преград по воздуху, обследование труднопроходимых поверхностей Земли и при выполнении других аналогичных работ. Предлагаемый летательный аппарат может быть использован для широкого применения в спортивных целях.
Использование: изобретение может быть использовано в летательных аппаратах спортивного назначения, например дельтапланах. Сущность изобретения: способ осуществления полем в воздухе физического тела (ФТ), связанного с аэродинамической поверхностью (АП), заключается в том, что силу взаимодействия между ФТ-АП периодически то уменьшают, то увеличивают. При уменьшении силы взаимодействия представляют ФТ возможность с ускорением перемещаться вниз, превращая потенциальную энергию ФТ в кинетическую, затем силу взаимодействия скачкообразно увеличивают и с ее помощью производят резкое торможение движения ФТ относительно АП, преобразуя при этом кинетическую энергию в другой ее вид (например, в потенциальную энергию сжатой пружины). Затем накопленную таким образом энергию используют сначала для перемещения ФТ с ускорением, а после этого дают возможность ФТ по инерции перемещаться вверх, замедляя свою скорость и превращая свою кинетическую энергию в потенциальную. Далее все процессы повторяются. 7 ил.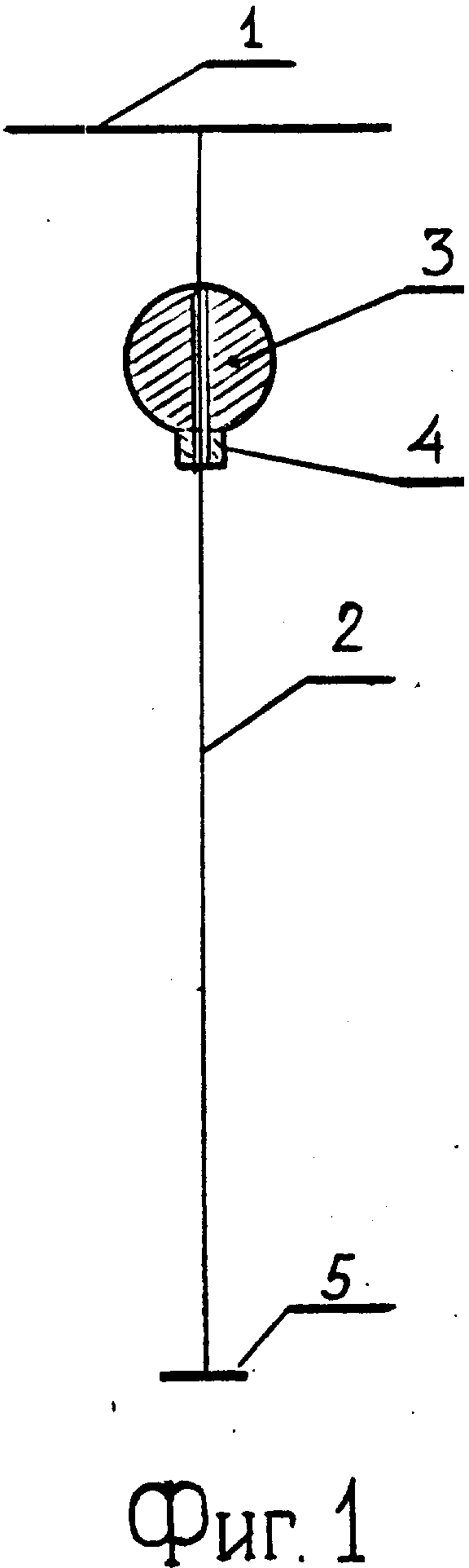
| SU, авторское свидетельство, 1066137, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |

