Изобретение относится к устройству для измерения тяги машущего крыла летательного аппарата и может быть использовано в экспериментальной авиационной технике при разработке и исследовании летательных аппаратов с машущим крылом (орнитоптер). Характеризуется повышенной точностью и наличием настраиваемых параметров измерений.
Далее в тексте заявителем приведены термины, необходимые для облегчения однозначного понимания сущности заявленного технического решения и исключения противоречий и/или спорных трактовок при выполнении экспертизы по существу.
- ОРНИТОПТЕР (от греческого, ornis, род. падеж ornithos - птица и pteron - крыло), махолёт, летательный аппарат тяжелее воздуха с машущими крыльями. Среди живых существ маховыми движениями крыльев для полёта пользуются, например, птицы. Исследования показывают, что отношение веса птицы к мощности её мускулов примерно то же, что и у человека (1350 ± 675 Н/кВт, или 100 ± 50 кгс/л.с.). Но добавление немалого веса конструкции самого орнитоптера делает задачу самостоятельного взлёта человека на такого рода аппарате практически неразрешимой. Однако если орнитоптер без двигателя (мускулолёт) предварительно разогнать или пустить с возвышения, то на нём можно взлететь и пролететь расстояние до 2 км. Экспериментальные полёты на простейших орнитоптерах (называются ортоптерами) совершались ещё в начале ХХ века (в 1921 - советским авиаконструктором Б.И. Черановским, в 1929 - немецким авиаконструктором Г. Краузе и др.). Создание орнитоптера, снабжённого двигателем и сложной системой передач движущегося крыла, представляет интерес главным образом с точки зрения развития теории динамики машущего крыла.
Лит.: Тихонравов М.К. Полёт птиц и машины с машущими крыльями, 2 изд., М., 1949; Александер Р. Биомеханика, пер. с англ., М., 1970; Шестакова Г.С. Строение крыльев и механика полёта птиц, М., 1971. С.Я. Макаров.
- Подъемная сила, составляющая полной силы давления жидкой или газообразной среды на движущееся в ней тело, направленная перпендикулярно к скорости тела (к скорости центра тяжести тела, если оно движется непоступательно). Возникает подъемная сила вследствие асимметрии обтекания тела средой. Например, при обтекании крыла самолёта частицы среды, обтекающие нижнюю поверхность, проходят за тот же промежуток времени меньший путь, чем частицы, обтекающие верхнюю, более выпуклую поверхность и, следовательно, имеют меньшую скорость. Но, согласно уравнению Бернулли, там, где скорость частиц меньше, давление среды больше, и наоборот. В результате давление среды на нижнюю поверхность крыла будет больше, чем на верхнюю, что и приводит к появлению подъемной силы.
Лит.: Глауэрт Г. Основы теории крыльев и винта, пер. с англ., М.-Л., 1931. М.Я. Юделович.
Орнитоптер является одним из видов летательных аппаратов, используемых в воздухоплавании. Одной из отличительных черт является наличие машущих частей, совершающих периодические действия вверх-вниз. Интерес к разработке орнитоптеров появился у людей еще до нашей эры и является одним из первых направлений в разработке воздухоплавательных средств. В дальнейшем, с созданием летальных аппаратов с неподвижным крылом, исследования по машущим крыльям заметно уменьшились. В настоящее время интерес к машущим летательным аппаратам набирает обороты с появлением более легких материалов, а также созданием новых динамических моделей полета. Одной из задач при разработке данного летательного аппарата является измерение его аэродинамических характеристик, таких как подъемная тяга и ускорение.
Из исследованного заявителем уровня техники выявлено изобретение по патенту CN 219257709 U «Многостепенное устройство взлета и посадки орнитоптера и испытательное устройство (Multi-degree-of-freedom ornithopter take-off and landing device and testing device)» (2023). Сущностью полезной модели является устройство для взлета и приземления орнитоптера с несколькими степенями свободы и испытательное устройство, на примере одного из устройств, устройство для взлета и приземления орнитоптера с несколькими степенями свободы содержит рамный корпус, подъемное устройство, подъемное устройство и испытательное устройство, контроллер; линейный модуль находится в приводном соединении с выдвижной рамой, а выдвижная рама снабжена вращающейся платформой; модуль качки; модуль тангажа приводит в движение модуль качки, совершая движение тангажа; модуль качения приводит во вращение кантилевер; спусковой модуль используется для фиксации или освобождения орнитоптера; передний конец упругого элемента кинетической энергии соединен с кантилевером, задний конец эластичного элемента кинетической энергии соединен с модулем высвобождения кинетической энергии, а упругий элемент кинетической энергии передает кинетическую энергию модулю высвобождения; модуль тяги находится в приводном соединении с модулем высвобождения и позволяет растягивать или освобождать упругий элемент кинетической энергии; и детектор положения используется для обнаружения положения, в котором модуль выпуска скользит до исходной длины упругого элемента кинетической энергии, и детектор положения, модуль тяги, модуль выпуска, модуль качения, модуль качки и линейный модуль все электрически связаны с контроллером.
Недостатками известного изобретения являются:
- контроллер находится в непосредственной близости от испытательного образца, что вызывает трудности с его наладкой и управлением;
- отсутствие тензометрических датчиков для измерения аэродинамических характеристик, нет возможности измерить создаваемую тягу летательного аппарата.
Известно изобретение по патенту CN 114781282 A «Метод моделирования динамики продольного положения орнитоптера на основе испытаний в аэродинамической трубе (Ornithopter longitudinal attitude dynamics modeling method based on wind tunnel test)» (2022). Сущностью изобретения является способ, с помощью которого моделируется полет с помощью испытания в аэродинамической трубе, измеряются экспериментальные данные продольного момента транспортного средства с машущим крылом и на основе экспериментальных данных рассчитывается средний продольный момент и частота взмахов транспортного средства с машущим крылом. На основе машущего движения и поступательного движения машущего летательного аппарата, а также синергетического эффекта машущего движения и поступательного движения продольный момент делится на первый момент, второй момент и третий момент. Создается модель без потока для продольного момента летательного аппарата с машущим крылом в соответствии с первым моментом и определяются первые параметры модели в соответствии со средним продольным моментом и частотой взмахов. На основе модели отсутствия притока устанавливается модель набегающего потока для продольного момента летательного аппарата с машущим крылом в сочетании со вторым моментом и третьим моментом, а параметры второй модели определяются в соответствии со средним продольным моментом и частотой взмахов.
Недостатками известного изобретения являются:
- для проведения экспериментов необходимы механические настройки аэродинамической трубы;
- нет измерения аэродинамических параметров летательного аппарата в режиме реального времени.
Наиболее близким к заявляемому техническому решению является изобретение по патенту CN 109927932 A «Регулируемая платформа для измерения силы орнитоптера и способ ее установки и использования (Adjustable ornithopter force measuring platform and mounting and use method thereof)» (2019). Сущностью прототипа является платформа для измерения силы летательного аппарата с регулируемым машущим крылом, содержащее зажимное устройство для фиксирования летательного аппарата с машущим крылом, нижний механизм регулировки угла установки зажимного устройства, механизм регулировки угла, который соединен с основанием через датчик силы. Угол может регулироваться. Механизм изменяет угол наклона зажимного устройства, так что датчик силы собирает информацию о силе и крутящем моменте самолета с машущим крылом при разных углах наклона. При этом зажимное устройство содержит плиту, на которой сформировано множество регулировочных канавок, а регулируемые пластины установлены симметрично с обеих сторон каждой регулировочной канавки для зажима машущих крыльев летательных аппаратов разных размеров.
Недостатками прототипа являются:
- отсутствует возможность измерения аэродинамических параметров в поступательном движении;
- система удержания летательного аппарата требует дополнительных креплений.
Решаемая заявляемым изобретением техническая задача заключается в разработке устройства для измерения аэродинамических параметров летательного аппарата с машущими крыльями с устранением недостатков известных из уровня техники средств, того же назначения и обеспечения технического результата с повышенной точностью и наличием настраиваемых параметров измерений.
Техническим результатом заявленного изобретения является:
1. Возможность измерения аэродинамических характеристик летательного аппарата, создаваемой подъемной тяги.
2. Измерение скорости полета летательного аппарата без использования аэродинамической трубы.
3. Возможность дистанционной обработки измеряемых параметров.
4. Измерение силы тяги в зависимости от изменения угла наклона летательного аппарата с машущими крыльями.
Сущностью заявленного изобретения является устройство для измерения аэродинамических характеристик летательного аппарата с машущими крыльями с возможностью регулирования измеряемых параметров, содержащее ложемент, закрепленный на пластмассовом переходнике, насаженном на металлический стержень, размещенный в установленном на балку измерительном блоке и вращающуюся платформу, закрепленную на вертикальной оси, соединенной с неподвижным основанием, в измерительном блоке устанавливают датчики для получения данных с летательного аппарата, отличающееся тем, что измерительный блок снабжен подвижной кареткой, на которой удерживается металлический стержень с летательным аппаратом, внутри измерительного блока размещены горизонтальный и вертикальный тензометрические датчики, предназначенные для измерения подъемной силы и угловой скорости летательного аппарата, сигналы от тензометрических датчиков подаются на управляющее устройство, которое преобразует аналоговые сигналы в цифровой формат, управляющее устройство управляет шаговым двигателем, который вращает платформу и измеряет угловую скорость балки, оцифрованные данные передаются на передающий блок, который отправляет их на персональный компьютер для обработки, персональный компьютер выводит результаты измерений на экран, обеспечивая дистанционное измерение и анализ аэродинамических характеристик.
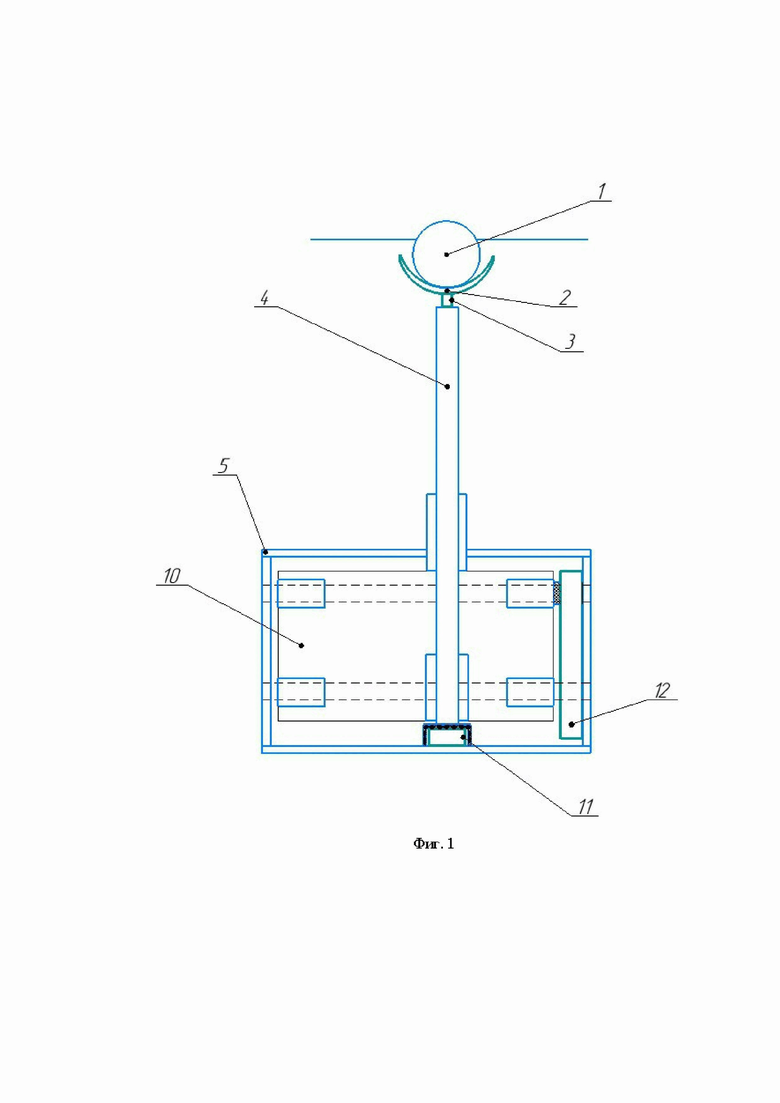
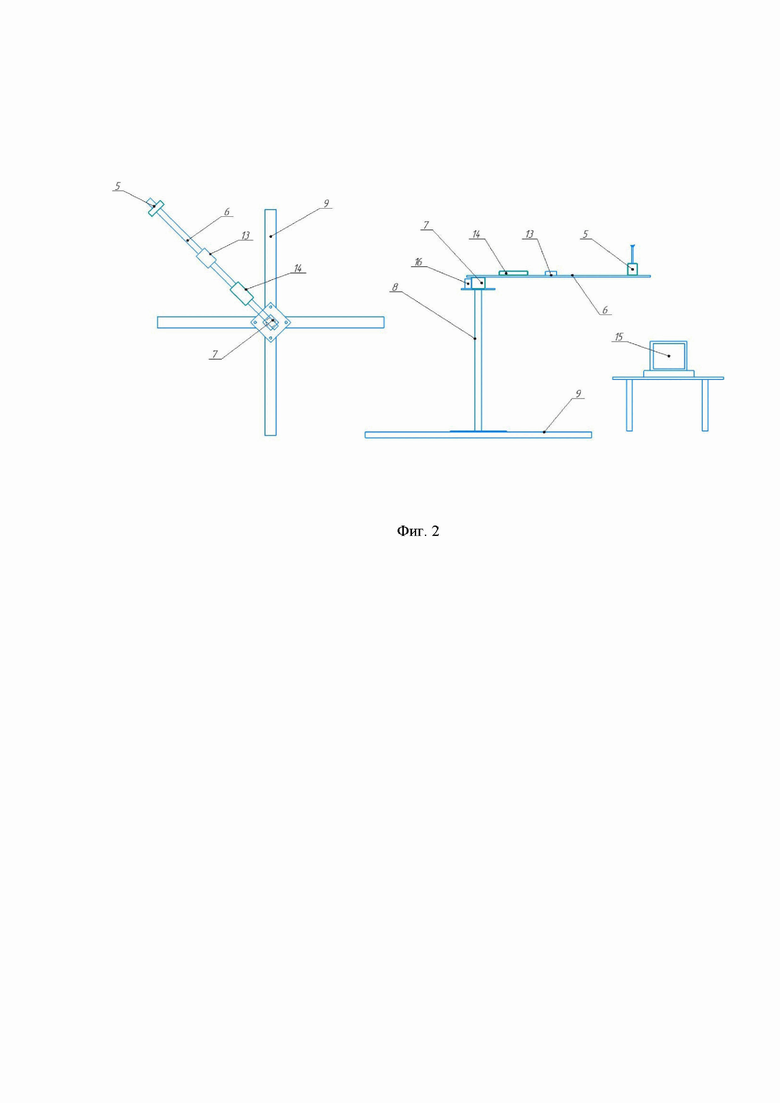
Заявленное техническое решение иллюстрируется на Фиг. 1-2.
На Фиг. 1-2 представлена функциональная схема заявляемого устройства в целом.
Позиции на фигурах обозначают:
1 - летательный аппарат;
2 - ложемент;
3 - пластмассовый переходник;
4 - металлический стержень;
5 - измерительный блок;
6 - балка;
7 - вращающаяся платформа;
8 - вертикальная ось;
9 - неподвижное основание;
10 - подвижная каретка;
11 - горизонтальный тензометрический датчик;
12 - вертикальный тензометрический датчик;
13 - управляющее устройство;
14 - передающий блок;
15 - персональный компьютер;
16 - шаговый двигатель.
Заявленное изобретение представляет собой устройство, функциональная схема которого, в целом, приведена на Фиг. 1-2.
В состав установки входят - ложемент 2, пластмассовый переходник 3, металлический стержень 4, измерительный блок 5, балка 6, вращающаяся платформа 7, вертикальная ось 8, неподвижное основание 9, подвижная каретка 10, горизонтальный тензометрический датчик 11, вертикальный тензометрический датчик 12, управляющее устройство 13, передающий блок 14, шаговый двигатель 16.
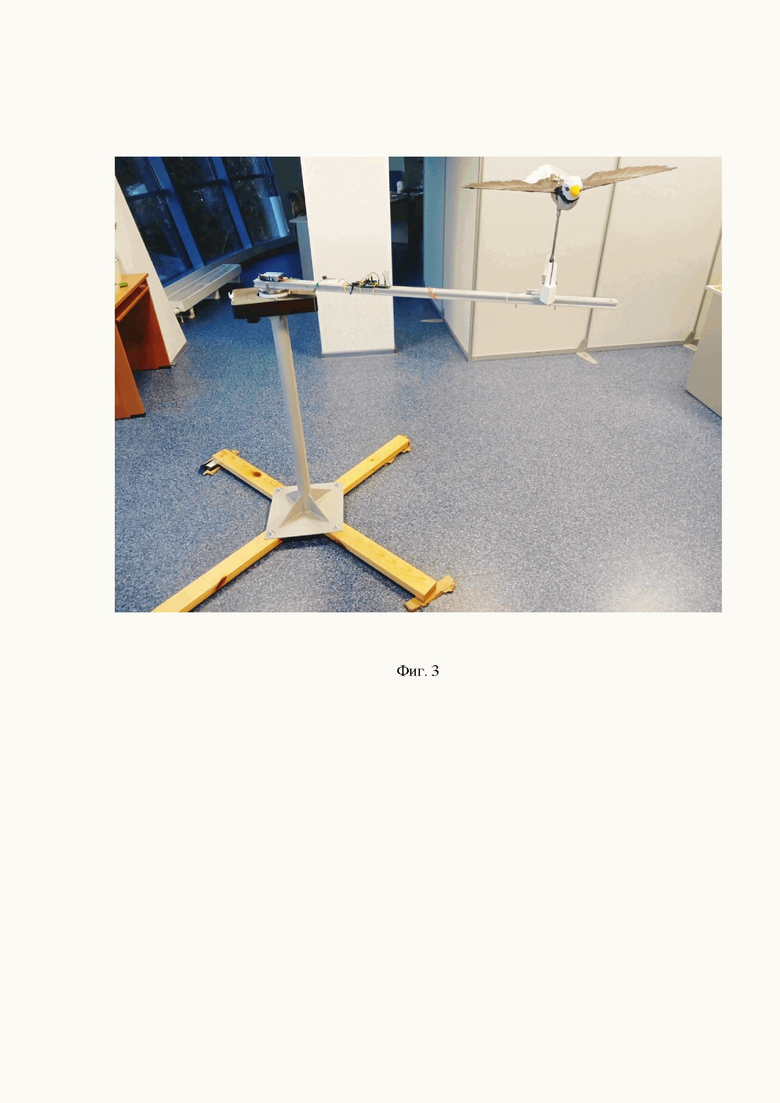
Заявленное устройство работает, в целом, следующим образом, на Фиг. 3 показан действующий рабочий прототип:
Шаг 1: Ложемент (2) закрепляют на пластмассовом переходнике (3). Пластмассовые переходники (3) необходимы, чтобы менять угол наклона летательного аппарата (1) во время измерений. Каждый пластмассовый переходник (3) предназначен для нужного угла наклона летательного аппарата (1). Далее пластмассовый переходник (3) вставляется в металлический стержень (4) для обеспечения достаточного расстояния между крыльями летального аппарата (1) и измерительным блоком (5).
Шаг 2: Измерительный блок (5) располагают на металлической балке (6). Балка (6) необходима для проведения экспериментов с летательным аппаратом (1) в полете. Таким образом, балка (6), установленная на вращающейся платформе (7), заменяет использование аэродинамической трубы. Вращающуюся платформу (7) устанавливают на вертикальной оси (8) из металла, имеющую длину от одного до двух метров. Для придания устойчивости всей измерительной системе, в которую входят ранее перечисленные компоненты, ось (8) крепят на неподвижное основание (9). Основание (9) имеет значительную площадь опоры.
Шаг 3: Измерительный блок (5) имеет форму пустотелого параллелепипеда. Внутри измерительного блока (5) располагают подвижную каретку (10) и тензометрические датчики (11), (12). В подвижную каретку (10) вставляют металлический стержень (4). Подвижность каретки (10) обеспечивается за счет использования пружин внутри блока или иного материала, создающего силу против деформации. Первый датчик (вертикальный тензометрический датчик) (11) закрепляют вертикально внутри блока (5) для измерения ускорения, создаваемого летательным аппаратом (1) во время взмахов крыльями. Второй датчик (горизонтальный тензометрический датчик) (12) закрепляют горизонтально внутри блока (5) для измерения подъемной тяги во время полета и измерения массы летательного аппарата (1).
Шаг 4: Сигналы от датчиков (11), (12) по проводам передаются на управляющее устройство (13). В управляющем устройстве (13) происходит преобразование сигналов с датчиков (11), (12) из аналоговой формы в цифровую. После преобразования оцифрованные данные отправляются на передающий блок (14). Передающий блок (14) по беспроводному каналу посылает данные на персональный компьютер (15). Экспериментатор по полученным данным рассчитывает вертикальную и горизонтальную составляющую сил, приложенных к тензометрическим датчикам (11), (12). По полученному результату вычисляются аэродинамические характеристики летального аппарата (1).
Шаг 5: Управляющее устройство (13) задает и регулирует скорость вращения шаговых двигателей (16) в зависимости от заданных параметров экспериментатора. Также управляющее устройство (13) измеряет скорость вращения на шаговых двигателях (16). Измеряемые данные посылаются на компьютер (15) через передающий блок (14). Экспериментатор по полученным данным вычисляет угловую скорость и далее линейную скорость летательного аппарата (1).
Заявленное устройство для измерения аэродинамических характеристик летательного аппарата с машущими крыльями иллюстрируется следующим примером, который не ограничивает область его применения.
Пример использования заявленного устройства
Шаг 1: Ложемент закрепили на пластмассовом переходнике с квадратным разъемом. В данном примере, переходник сделан для горизонтального расположения летательного аппарата на установке. Далее пластмассовый переходник закрепили на стальном стержне. Стальной стержень имеет длину 30 сантиметров, а также заранее измерена его масса.
Шаг 2: Измерительный блок, состоящий из специализированной микросхемы HX711 для преобразования аналогового сигнала в цифровой, расположили на металлической балке длиной полтора метра. Далее закрепили балку на вращающейся платформе. Внутри платформы находятся подшипники для уменьшения трения. Чтобы измеряемый летательный аппарат был поднят над полом на необходимую высоту, вращающуюся платформу установили на вертикальную ось длиной 1 метр. Для придания устойчивости установке, вертикальную ось закрепили болтами за деревянную крестовину, основание.
Шаг 3: Измерительный блок был сделан из пластика и имеет незначительную массу. Для придания обтекаемости, одна из сторон блока имеет острую форму по ходу движения. Внутри блока расположили подвижную каретку на пружинах, а также были установлены тензометрические датчики на пять килограмм. На верхнюю сторону каретки закрепили металлический стержень, на который установили ложемент и летательный аппарат. Один тензометрический датчик расположили вертикально по ходу движения каретки для измерения силы, возникающей по ходу движения. Второй тензометрический датчик установили на дно каретки для измерения изменения веса летательного аппарата.
Шаг 4: Сигналы, полученные от тензометрических датчиков, передавали на микросхему HX711 для их преобразования в цифровую форму. После преобразования оцифрованные данные передавали на блютуз передатчик (передающий блок). Получали цифровые данные от передающего устройства и рассчитывали по ним вертикальную и горизонтальную составляющую сил, приложенных к тензометрическим датчикам. По полученному результату вычисляли аэродинамические характеристики летального аппарата.
Шаг 5: Задали постоянную скорость вращения шаговых двигателей с помощью управляющего устройства. По скорости вращения шаговых двигателей вычисляли линейную скорость летательного аппарата с помощью данных, принятых от передающего блока.
Таким образом, из описания выше можно сделать вывод, что заявителем достигнут заявленный технический результат:
1. Возможность измерения аэродинамических характеристик летательного аппарата, создаваемой подъемной тяги.
2. Измерение скорости полета летательного аппарата без использования аэродинамической трубы.
3. Дистанционная обработка измеряемых параметров на персональном компьютере.
4. Измерение силы тяги в зависимости от изменения угла наклона летательного аппарата с машущими крыльями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРНИТОПТЕР | 2002 |
|
RU2270136C2 |
| МАХОЛЕТ | 2016 |
|
RU2659357C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЁТ | 2014 |
|
RU2578389C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| Махолет | 2017 |
|
RU2655582C1 |
| УСТРОЙСТВО ТАНДЕМНЫХ МАШУЩИХ КРЫЛЬЕВ С АВТОМАТИЧЕСКОЙ ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2007 |
|
RU2350509C2 |
| Способ создания подъемной силы летательного аппарата | 2024 |
|
RU2831867C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
Изобретение относится к экспериментальной аэродинамике, в частности к устройству для измерения тяги машущего крыла летательного аппарата, и может быть использовано в экспериментальной авиационной технике при разработке и исследовании летательных аппаратов с машущим крылом (орнитоптер). Устройство содержит ложемент, закрепленный на пластмассовом переходнике, насаженном на металлический стержень, размещенный в установленном на балку измерительном блоке, и вращающуюся платформу, закрепленную на вертикальной оси, соединенной с основанием. При этом измерительный блок снабжен подвижной кареткой, на которой удерживается металлический стержень. Внутри измерительного блока размещены горизонтальный и вертикальный тензометрические датчики, выполненные с возможностью передачи данных о подъемной силе и угловой скорости летательного аппарата на закрепленное на балке управляющее устройство с шаговым двигателем, выполненным с возможностью управления вращением платформой и измерения угловой скорость балки. При этом на балке дополнительно размещен передающий блок, выполненный с возможностью передачи измерительных сигналов на обработку. Технический результат заключается в возможности измерения аэродинамических характеристик летательного аппарата, создаваемой подъемной тяги, измерения скорости полета летательного аппарата без использования аэродинамической трубы, измерения силы тяги в зависимости от изменения угла наклона летательного аппарата с машущими крыльями. 3 ил.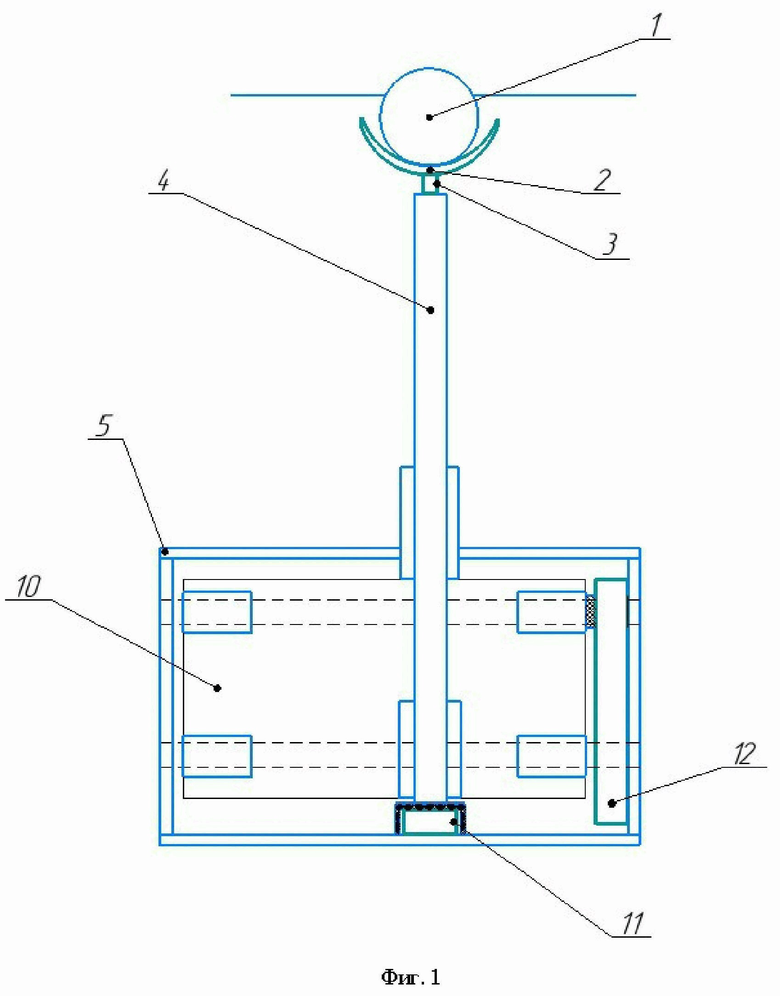
Устройство для измерения аэродинамических характеристик летательного аппарата с машущими крыльями с возможностью регулирования измеряемых параметров, содержащее ложемент, закрепленный на пластмассовом переходнике, насаженном на металлический стержень, размещенный в установленном на балку измерительном блоке, и вращающуюся платформу, закрепленную на вертикальной оси, соединенной с основанием, отличающееся тем, что измерительный блок снабжен подвижной кареткой, на которой удерживается металлический стержень, внутри измерительного блока размещены горизонтальный и вертикальный тензометрические датчики, выполненные с возможностью передачи данных о подъемной силе и угловой скорости летательного аппарата на закрепленное на балке управляющее устройство с шаговым двигателем, выполненным с возможностью управления вращением платформой и измерения угловой скорость балки, при этом на балке дополнительно размещен передающий блок, выполненный с возможностью передачи измерительных сигналов на обработку.
| CN 109927932 A, 25.06.2019 | |||
| CN 114781282 A, 22.07.2022 | |||
| CN 219257709 U, 27.06.2023 | |||
| СПОСОБ СОЗДАНИЯ НЕСТАЦИОНАРНОГО ВОЛНОВОГО ПОТОКА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ ДЛЯ ИССЛЕДОВАНИЯ РАБОТЫ МАШУЩЕГО КРЫЛА | 2009 |
|
RU2433380C2 |

