Изобретение относится к области измерительной техники и может быть использовано в тензометрических весах, а также в качестве преобразователя механических величин (давления, перемещения, деформации, усилия) в электрический сигнал.
В весовых системах широко используются датчики силы с упругими параллелограммными элементами. Примером такого датчика является силоизмерительное устройство (заявка DE N 2900614, кл. G 01 L 1/22, 1979). Известное устройство содержит упругий элемент в форме параллелограмма, имеющий две жесткие опоры, соединенные между собой двумя упругими балочками с образованием упругой параллелограммной подвески, и тензорезисторы, сформированные на утоненных концах упругих балочек. Недостатками данного устройства являются ограниченный диапазон измеряемых нагрузок, большие погрешности из-за влияния крутящего момента, возникающего при нецентровом нагружении, и отсутствие в нем защиты от перегрузок.
В патенте США N 4107985, кл. 73-141 A, G 01 L 1/22, 1978 описан датчик для тензометрических весов, содержащий две жесткие опоры, соединенные двумя упругими балочками с образованием параллелограммной подвески, и дополнительную упругую балочку с тензорезисторами, установленную параллельно первым двум упругим балочкам в средней части параллелограммной подвески и имеющую две консоли, соединенные утоненным участком. Размещение тензорезисторов вблизи нейтральной линии деформации параллелограммной подвески на достаточно жестких консолях снижает точность измерения усилия, так как величина изгибных деформаций консолей будет незначительна по сравнению с деформацией утоненных концов упругих балочек, образующих шарниры параллелограммной подвески, что делает это решение неприемлемым, в частности для высокоточных тензометрических весов. Кроме этого известный датчик не защищен перегрузок.
В заявке DE N 2552170, кл. G 01 L 1/22, 1977 описан датчик для измерения усилий, содержащий две жесткие опоры, соединенные двумя основными упругими балочками в виде пластин и размещенными между ними дополнительными упругими балочками с образованием параллелограммной подвески, и тензорезисторы, размещенные на наружной поверхности основных упругих балочек. Отмечается, что, изменяя количество дополнительных упругих балочек, можно в широких пределах варьировать номинальные нагрузки, не изменяя высоты упругого элемента, что обеспечивает возможность унификации крепежных узлов и монтажа датчика. Недостатками данного устройства являются отсутствие защиты от перегрузок и большие погрешности из-за влияния крутящего момента, возникающего при нецентровом нагружении.
Известен также тензорезисторный силоизмерительный датчик, способный воспринимать значительные осевые усилия. Датчик содержит упругий элемент в виде сплошного цилиндра с закрепленными на его поверхности тензорезисторами (авт. св. СССР N 678349, кл. G 01 L 1/22, 1/04, 1979). Как и во всех датчиках этого типа точность измерения ими приложенного усилия напрямую зависит от линейных размеров центральной зоны датчика, составляющей не более 20% от общей его длины. Точность измерения можно повысить, увеличив линейные размеры датчика, но в этом случае габариты датчика также увеличиваются, что делает невозможным использование его в весовых системах, где возможности увеличения размеров крайне ограничены, в частности в бытовых весах, весоизмерительных системах на транспорте и т.п.
Наиболее близким к заявляемому изобретению по совокупности существенных признаков является датчик для тензометрических весов, (заявка РФ N 93000842/28, кл. G 01 G 3/12, опублик. 27.02.95). Датчик содержит упругий элемент в форме параллелограмма, имеющий две жесткие опоры в виде уголков с попарно параллельными вертикальными и горизонтальными полками, три параллельные упругие балочки с утоненными концами, образующими упругие шарниры, и тензорезисторы, сформированные на средней упругой балочке, при этом вертикальные полки жестких опор соединены между собой упругими балочками с образованием упругой параллелограммной подвески, а горизонтальные полки жестких опор размещены с перекрытием торцев вертикальных полок. Известный датчик способен с высокой точностью измерить приложенное к нему сжимающее усилие, но величина измеряемого усилия ограничивается прочностными характеристиками параллелограммной подвески. Как и в других датчиках с параллелограммной подвеской конструктору приходится искать компромисс между желанием создать датчик с большим измеряемым усилием, увеличив толщину перемычек в упругих шарнирах, что приведет к появлению нелинейных эффектов и уменьшению относительной деформации упругих балочек, и добиться высокой точности измерения, уменьшая толщину перемычек в упругих шарнирах, что приведет к уменьшению диапазона воспринимаемых нагрузок.
3адачей изобретения является создание датчика для тензометрических весов, имеющего малые габариты и способного с высокой точностью измерять значительные усилия, в том числе знакопеременные (сжатие-растяжение), путем разделения функций измерения упругих деформаций датчика и восприятия силовой нагрузки.
Поставленная техническая задача решается тем, что известный датчик для тензометрических весов, содержащий упругий элемент в форме параллелограмма, имеющий две жесткие опоры в виде уголков с попарно параллельными вертикальными и горизонтальными полками, три параллельные упругие балочки и тензорезисторы, сформированные на средней упругой балочке, при этом вертикальные полки жестких опор соединены между собой упругими балочками с образованием упругой параллелограммной подвески, а горизонтальные полки жестких опор размещены с перекрытием торцев вертикальных полок, согласно изобретению снабжен двумя дополнительными упругими элементами, установленными между жесткими опорами симметрично относительно параллелограммной упругой подвески и жестко с ними соединенными, причем дополнительные упругие элементы выполнены с идентичными упругими характеристиками, а их суммарная жесткость превышает жесткость параллелограммной упругой подвески.
Кроме этого каждый из дополнительных упругих элементов может быть размещен между горизонтальной и вертикальной полками жестких опор. Дополнительные упругие элементы могут быть размещены между горизонтальными полками жестких опор параллельно вертикальным полкам и выполнены за одно целое с жесткими опорами.
Сущность изобретения заключается в том, что при наличии в датчике для тензометрических весов двух дополнительных упругих элементов, установленных между жесткими опорами и имеющих суммарную жесткость, превышающую жесткость упругой параллелограммной подвески, практически вся измеряемая сила воспринимается дополнительными упругими элементами, работающими в зоне упругих деформаций, а сами упругие деформации этих элементов измеряются тензорезисторами, сформированными на средней упругой балочке параллелограммной подвески, воспринимающей минимальную силовую нагрузку, что позволяет сделать упругие шарниры в параллелограммной подвеске с минимальной толщиной перемычек и добиться высокой точности измерения поперечных перемещений параллелограммной подвески. Преимуществом такого сочетания силовоспринимающих упругих элементов и параллелограммной подвески является то, что измеряется полная деформация дополнительных упругих элементов, причем перемещение параллелограммной подвески не зависит от величины относительной деформации отдельных участков дополнительных упругих элементов и поэтому неравномерность деформации по длине дополнительных упругих элементов не влияет на точность измерения усилия. Большим преимуществом сочетания силовоспринимающих упругих элементов и упругой параллелограммной подвески с тензорезисторами на средней упругой балочке является своеобразное "усиление" измеряемой деформации в параллелограммной подвеске, так как размеры датчика и его деформация определяются, в основном, геометрическими характеристиками упругих балочек параллелограммной подвески и не зависят от размеров дополнительных упругих элементов. Причем, чем тоньше перемычки упругих шарниров в параллелограммной подвеске, тем выше коэффициент "усиления" измеряемой деформации. Учитывая, что геометрические характеристики - размеры упругих балочек параллелограммной подвески определяются только исходя из задачи повышения точности измерения деформации, то появляется возможность спроектировать параллелограммную подвеску на заданную точность измерения для любого диапазона измерения силы, в том числе для малогабаритных датчиков с измеряемым усилием 100 кН и более.
Раздельное проектирование силовой и измерительных систем датчика дает большую свободу конструктору. В тензометрических весах массового производства, где определяющим будут требования технологии, каждый дополнительный упругий элемент размещен между горизонтальной и вертикальной полками жестких опор. Для тензометрических весов уникальных объектов с высокой точностью измерения дополнительные упругие элементы размещают между горизонтальными полками жестких опор параллельно вертикальным полкам, что повышает точность измерения силы за счет увеличения базовой длины дополнительных упругих элементов.
Выполнение дополнительных упругих элементов за одно целое с жесткими опорами упрощает технологию изготовления датчика и гарантирует наилучшее совпадение упругих характеристик дополнительных упругих элементов, а соответственно и равенство их перемещений при нагружении, что повышает точность взвешивания.
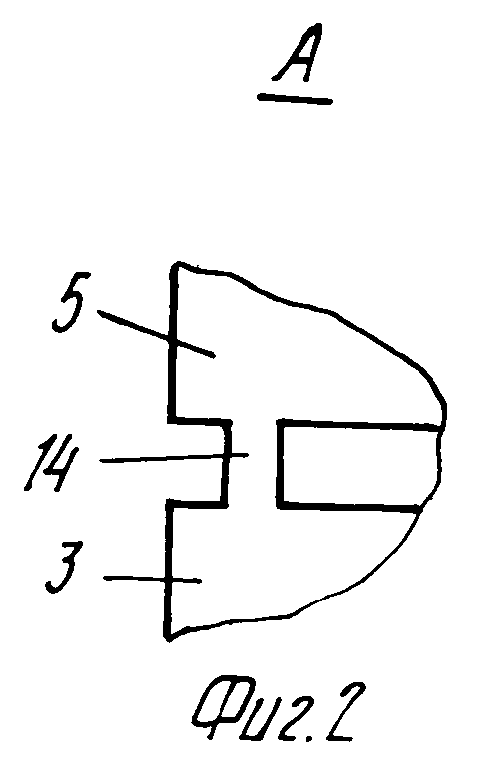
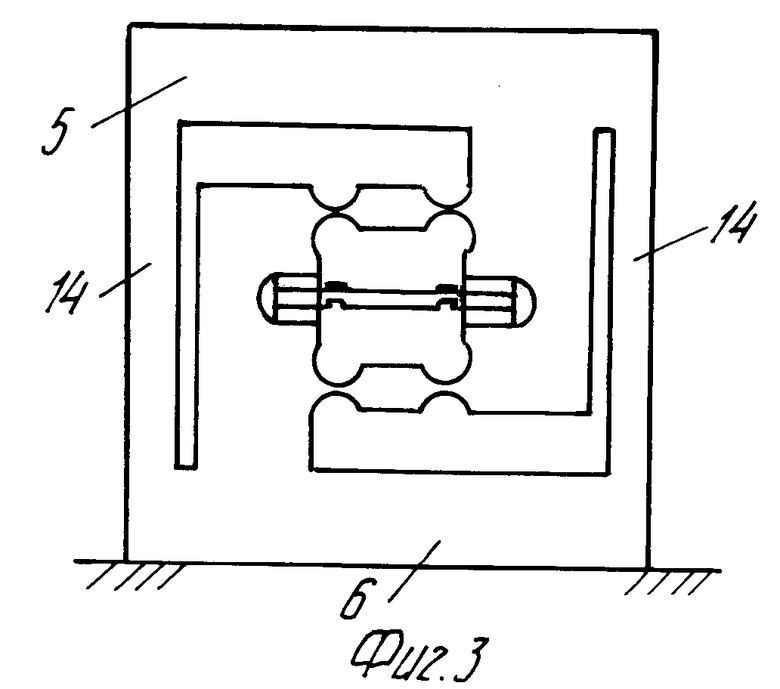
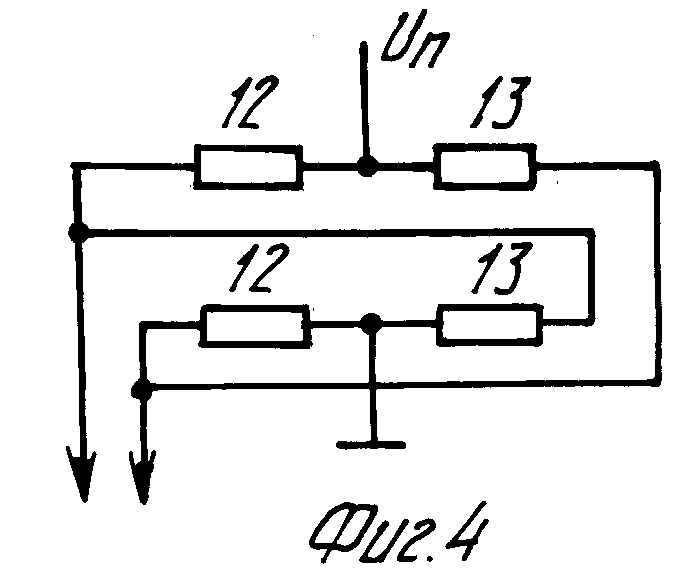
На фиг. 1 изображен предлагаемый датчик для тензометрических весов, общий вид; на фиг. 2 - вид А на фиг. 1 при выполнении каждого дополнительного упругого элемента за одно целое с вертикальной и горизонтальной полками; на фиг. 3 - датчик с увеличенными по длине дополнительными упругими элементами; на фиг. 4 - схема подключения тензорезисторов.
Датчик содержит упругий элемент в форме параллелограмма, имеющий две жесткие опоры 1 и 2 в виде уголков с попарно параллельными вертикальными 3 и 4 и горизонтальными 5 и 6 полками, три параллельные упругие балочки 7 - 9 одинаковой длины с утонениями 10 и 11 на концевых участках, образующими упругие шарниры, тензорезисторы 12 и 13 и дополнительные упругие элементы 14. Вертикальные полки 3 и 4 жестких опор 1 и 2 соединены между собой упругими балочками 7 - 9 с образованием параллелограммной подвески, а горизонтальные полки 5 и 6 размещены с перекрытием торцев 15 вертикальных полок 3 и 4. Жесткие опоры 1 и 2 и упругие балочки 7 и 9 выполнены за одно целое из металлической пластины электроэрозионной резкой, чем обеспечивается идеальная моментная заделка концов упругих балочек 7 и 9. Упругие элементы 14 выполнены в виде прямоугольных параллелепипедов с утонениями на их средней части. Концы упругих элементов 14 вклеены в пазы, выполненные в вертикальных 3 и 4 и горизонтальных полках 5 и 6 жестких опор 1 и 2 симметрично относительно параллелограммной подвески. Упругие элементы 14 имеют идентичные упругие характеристики, а их суммарная жесткость превышает жесткость параллелограммной подвески. Средняя упругая балочка 8 изготовлена из монокристаллического кремния с кристаллографической ориентацией (100) с диффузионными тензорезисторами 12 и 13 на нагруженных поверхностях в зоне утонений 11. Концы упругой балочки 8 вклеены в пазы вертикальных полок 3 и 4 через электроизоляционные прокладки 17. Горизонтальная полка 5 жесткой опоры 2 образует подвижное основание датчика, а горизонтальная полка 6 жесткой опоры 1 - неподвижное основание. При использовании датчика для измерения знакопеременных нагрузок горизонтальные полки 5 и 6 снабжаются крепежными элементами (не показаны). Тензорезисторы 12 и 13 соединены в мост Уинстона, который одной своей диагональю подключен к источнику стабилизированного питания Uп, а другая диагональ является измерительной.
По второму примеру выполнения датчика, показанному на фиг.1 и 2, каждый дополнительный упругий элемент 14 выполнен за одно целое с вертикальной 3 (4) и горизонтальной 5 (6) полками жестких опор.
По третьему примеру выполнения датчика (фиг.3) дополнительные упругие элементы 14 размещены между горизонтальными полками 5 и 6 жестких опор 2 и 1 параллельно вертикальным полкам 3 и 4 и выполнены за одно целое с указанными горизонтальными полками.
Предлагаемое устройство работает следующим образом.
При нагружении датчика силой P подвижное основание, горизонтальная полка 5 перемещается вниз в направлении действия указанной силы. Под действием усилия нагружения упругие элементы 14 деформируются. Одновременно с деформацией упругих элементов 14 происходит поворот всех трех упругих балочек 7 - 9 на некоторый угол относительно упругих шарниров - утонений 10 и 11. Ввиду того, что все три упругие балочки 7 - 9 выполнены одинаковой длины, угловые и линейные перемещения упругих балочек равны. Величина продольных линейных перемещений упругих балочек 7 - 9 определяется жесткостью дополнительных упругих элементов 14 и не зависит от жесткости параллелограммной подвески. Угловые перемещения в шарнирах определяются только геометрией упругих балочек и толщиной перемычек в упругих шарнирах. Поскольку толщина перемычки выбирается только из условия обеспечения точности измерения деформаций (на параллелограммную подвеску измеренное усилие практически не воздействует), то в заявленном датчике можно получить большие угловые перемещения, чем в известных параллелограммных подвесках, что повышает точность измерения. На тензорезисторы 12 и 13 воздействуют механические напряжения от изгиба, пропорциональные приложенной силе, причем на парах тензорезисторов 12 и 13 изгибные напряжения имеют разный знак. При изменении сопротивления тензорезисторов 12 и 13 происходит разбаланс моста Уинстона и на его измерительной диагонали возникает напряжение, пропорциональное приложенной силе.
Работа устройства на растяжение аналогична работе устройства на сжатие.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ | 1995 |
|
RU2111463C1 |
| ДАТЧИК УСИЛИЙ ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1997 |
|
RU2114405C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1994 |
|
RU2082122C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1996 |
|
RU2102710C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2004 |
|
RU2308010C2 |
| ИЗМЕРИТЕЛЬНАЯ ВСТАВКА | 2011 |
|
RU2458326C1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| ПОЛУПРОВОДНИКОВЫЙ МОДУЛЬ | 1995 |
|
RU2089013C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2010 |
|
RU2437070C2 |
Использование: в электронных тензовесах и в качестве преобразователя механических величин в электрический сигнал. Сущность изобретения: датчик содержит упругий элемент в форме параллелограмма, имеющий две жесткие опоры в виде уголков с попарно параллельными вертикальными и горизонтальными полками, три параллельные упругие балочки и тензорезисторы на средней упругой балочке. Вертикальные полки жестких опор соединены упругими балочками с образованием упругой параллелограммной подвески, горизонтальные полки размещены с перекрытием торцев вертикальных полок. Датчик снабжен двумя дополнительными упругими элементами, установленными между жесткими опорами симметрично относительно параллелограммной упругой подвески и жестко с ними соединенными. При этом дополнительные упругие элементы выполнены с идентичными упругими характеристиками, а их суммарная жесткость превышает жесткость параллелограммной упругой подвески. 3 з.п.ф-лы, 4 ил.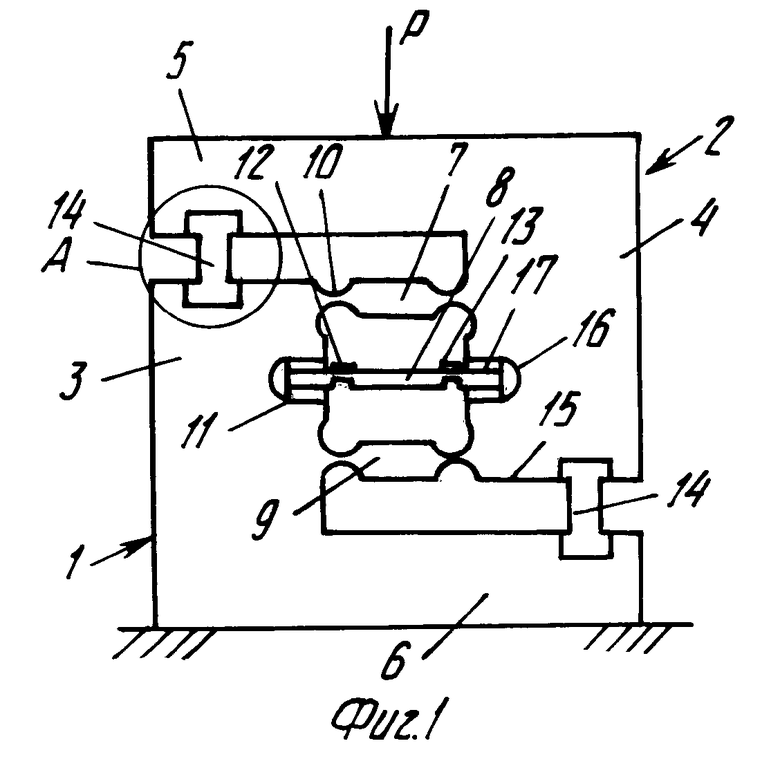
| RU, заявка, 93000842, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
