Изобретение относится к геоэлектроразведке методами становления электромагнитного поля и может быть использовано для прямого поиска локальных геологических объектов, в том числе и вблизи дневной поверхности.
Известны способ и система непосредственных поисков геологических объектов многовитковыми петлями (патент Польши N 131907). Способ заключается в излучении электромагнитных импульсов с произвольной длительностью, определении коэффициента вызванной поляризации и классификации объектов через распознавание образов, при этом с помощью многовитковых петель измеряют значения магнитных моментов и затем создают вектор черт, описывающий искомый геологический объект, после чего оценивают вероятное правдоподобие и определяют принадлежность объекта к данному классу.
Используемый в данном случае источник поля в виде многовитковых петель имеет ограниченный пространственно-временной диапазон и способен создавать в исследуемой среде вихревые токи, имеющие преимущественно латеральное распространение, что затрудняет поиск тонких плохопроводящих объектов типа "залежь". Кроме того, ограниченный пространственно-временной диапазон источника поля обуславливает необходимость получения как можно большего количества информации для успешного распознавания образов, что сопровождается неизбежными энергетическими затратами на получение избыточной информации. Поскольку вихревые токи имеют преимущественно латеральное распространение, система обладает ограниченным диапазоном и по глубине, а эффект вызванной поляризации в незаземленной петле выражен достаточно слабо, что и позволяет выделять только достаточно сильно различающиеся между собой локальные аномалии вызванной поляризации по сравнению с фоновой поляризуемостью окружающих пород.
Устройство, реализующее вышеописанный способ, состоит из передающей части, связанной с геологической средой и соединенной телеметрической связью через нормирующий блок с приемной частью, которая через блок измерения данных соединена с цифровым регистратором, при этом передающая часть на выходе, а приемная на входе имеют тороидальные обмотки (многовитковые петли), причем в приемной части переключающий блок управляет входами усилителей, один из которых соединен с фильтром постоянной составляющей, а другой - с блоком компенсации.
С помощью вышеописанного устройства трудно реализовать предлагаемый способ прямого поиска геологических объектов в широком временном диапазоне, поскольку многовитковые петли обладают большей индуктивностью, чем одновитковые петли, и вследствие этого система не способна выполнять измерения значений магнитной составляющей на ранних стадиях переходного процесса, а в случае гармонического сигнала - на высоких частотах. Следовательно, невозможен поиск локальных объектов на небольших глубинах.
Наиболее близким к предлагаемому является способ геоэлектроразведки с помощью кругового электрического диполя (КЭД), который составлен в соответствии с описанием (Могилатов В. С., Балашов Б.П. Зондирования вертикальными токами. //Физика Земли. N 6 1994, с. 73 - 79), заключающийся в том, что в исследуемой среде возбуждают электромагнитное поле путем осесимметричного введения в землю электрического тока импульсной формы с помощью питающих электродов, одни из которых располагают в центральной части окружности, образованной другими питающими электродами (таким образом создают круговой электрический диполь). Измеряют сигналы переходного процесса электрической и магнитной составляющих поля по профилям, радиально расходящимся от центра окружности, и по результатам измерений судят о строении исследуемой среды. При таком способе геоэлектроразведки, как следует из общих физических соображений, так и подтверждается математическим моделированием - нормальное поле на дневной поверхности отсутствует, так как скомпенсировано геометрией установки, естественно, при равных токах в лучах КЭД. Понятно, что при любом нарушении горизонтальной однородности разреза возникает аномальное магнитное поле. Следовательно, способ позволяет проводить прямой поиск локальных объектов, так как любое нарушение горизонтально-слоистой структуры разреза отмечается уже одним фактом фиксации сигнала. Однако известный способ не позволяет судить о том, какой конкретный геологический объект (карсты, кимберлитовые тела и т.п.) вызвал данное нарушение горизонтальной однородности разреза. Способ не позволяет также предварительно построить геоэлектрический разрез вмещающей среды, так как ориентирован на получение аномального сигнала, а значит, не позволяет провести расчет ожидаемых значений сигналов переходного процесса для случая, когда геоэлектрический разрез вмещает геоэлектрическую модель исследуемого объекта с различными параметрами и, следовательно, не обеспечивает высокой информативности исследований.
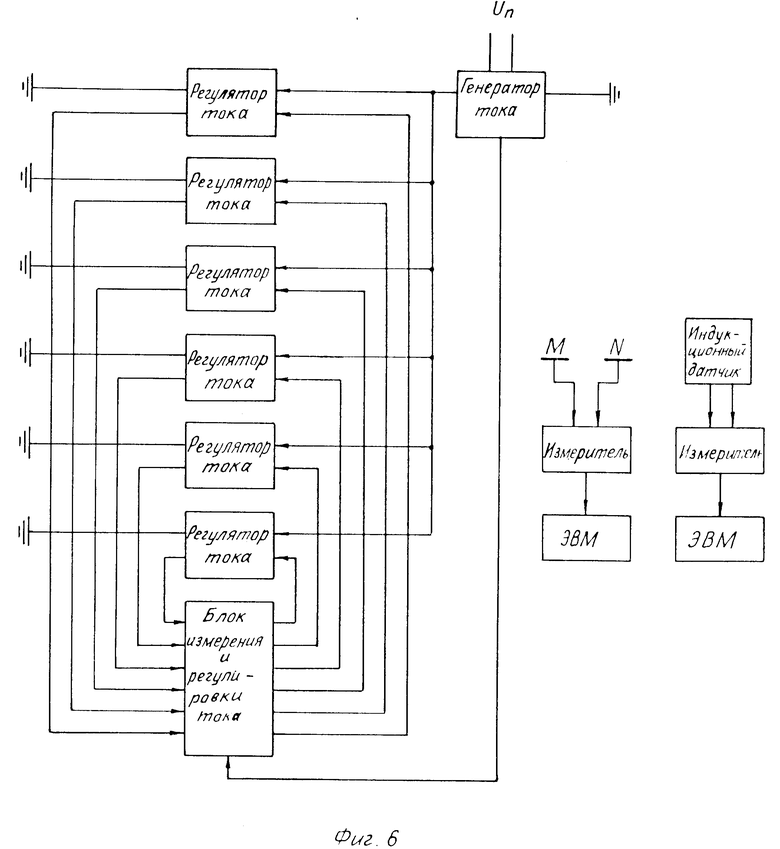
Наиболее близким к предлагаемому является устройство для осуществления известного способа (фиг. 8), функциональная схема которого составлена в соответствии с описанием (Могилатов В.С., Балашов Б.П. Зондирования вертикальными токами. //Физика Земли. N 6, 1994, с. 73 - 79) и содержит подключенный к источнику питания генератор тока, соединенный первым выходом с питающим электродом, расположенным в центре окружности, образованной другими питающими электродами, которые подключены к второму выходу генератора тока с помощью соответствующих лучевых отрезков питающей линии, расположенных по радиусам этой окружности через равные заданные углы, не превышающие 60o. В каждый из лучевых отрезков питающей линии включен регулятор тока. Измерительные выходы регуляторов тока соединены с управляющими входами регуляторов тока через блок измерения и регулировки тока, синхронизирующий вход которого объединен с соответствующим входом генератора тока. Измеритель магнитной составляющей поля соединен с индукционным датчиком и переносной ЭВМ, а измеритель электрической составляющей соединен с датчиком электрической составляющей поля, представляющим собой приемную линию MN, и переносной ЭВМ. Синхронизация момента выключения тока генератора тока и момента начала работы измерителей магнитной составляющей и электрической составляющей осуществляется с помощью одновременной работы кварцевых часов в генераторе тока и измерителях.
Данное устройство позволяет осуществлять известный способ прямого поиска геологических объектов, но обладает рядом недостатков. Во-первых, с увеличением числа лучевых отрезков или с увеличением тока в лучевых отрезках необходимо увеличивать амплитуду импульсов тока генератора тока, поскольку она равна сумме амплитуд токов в лучевых отрезках и, соответственно, требуется генератор тока большей выходной мощности, что снижает надежность работы устройства. Во-вторых, известное устройство не обеспечивает стабилизации амплитуды импульсов тока в лучевых отрезках, что приводит к нарушению осевой симметрии введения тока в землю, а следовательно, к повышению фона нескомпенсированного нормального магнитного поля. В-третьих, при поисках геологических объектов, залегающих на небольших глубинах, т.е. при измерениях сигнала переходного процесса на ранних стадиях, требуется высокая точность кварцевой синхронизации между генератором тока и измерителями электрической и магнитной составляющих поля, что в полевых условиях трудно обеспечивать, так как высокостабильные кварцевые часы достаточно громоздки и требуют дополнительного расхода энергии.
Изобретение направлено на решение задачи прямого поиска конкретных геологических объектов, повышения информативности исследований, понижения фона нескомпенсированного нормального магнитного поля и расширения диапазона исследуемых глубин в сторону малых значений, а также повышения надежности работы устройства.
Сущность изобретения состоит в том, что в способе прямых поисков геологических объектов, при котором зондируют исследуемую среду, возбуждая электромагнитное поле путем осесимметричного введения в землю тока импульсной формы с помощью питающих электродов, одни из которых располагают в центральной части окружности, образованной другими питающими электродами, измеряют после выключения каждого импульса тока сигналы переходного процесса электрической и магнитной составляющих поля по профилям, радиально расходящимся из центра окружности, и по измеренным значениям судят о строении исследуемой среды, предлагается дополнительно зондировать исследуемую среду путем введения в землю электрического тока импульсной формы с помощью двух диаметрально противоположных питающих электродов, расположенных по окружности, и после выключения каждого импульса тока измерять сигнал переходного процесса магнитной составляющей поля, а по результатам этих измерений строить геоэлектрический разрез вмещающей среды и определять ожидаемые значения сигналов переходного процесса электрической и магнитной составляющих поля для случая, когда полученный геоэлектрический разрез вмещает геоэлектрическую модель искомого объекта, при этом параметры геоэлектрической модели варьировать в заданных пределах, а о наличии или отсутствии искомого объекта в исследуемой среде и о параметрах этого объекта предлагается судить по результатам сравнения измеренных значений сигналов переходного процесса, полученных в результате основных зондирований, с ожидаемыми значениями этих сигналов. При этом после выключения тока, вводимого в землю с помощью двух диаметрально противоположных питающих электродов, расположенных по окружности, измерения сигналов переходного процесса магнитной составляющей поля могут выполняться по профилям, перпендикулярным прямой, соединяющей эти два питающих электрода. Сравнение измеренных значений сигналов переходного процесса, полученных в результате основных зондировании, с ожидаемыми значениями этих сигналов может производиться на временах максимального проявления сигнала переходного процесса магнитной составляющей поля. Причем период импульсов тока, вводимого в землю, и моменты начала измерений сигналов переходного процесса могут быть синхронизированы с эталонным сигналом времени и частоты спутниковой радионавигационной системы.
Текущее амплитудное значение импульсов тока, подводимого к каждому из питающих электродов, расположенных по окружности, может сравниваться с заданной величиной и при несовпадении изменяться до заданной величины.
Сущность изобретения заключается также в том, что в устройстве для осуществления предлагаемого способа, содержащем источник питания, связанный с генератором тока, питающие электроды, расположенные в центральной части окружности, образованной другими питающими электродами, лучевые отрезки питающей линии, одни концы которых подключены к соответствующим питающим электродам, расположенным по окружности, а другие концы объединены, при этом лучевые отрезки расположены по радиусам окружности через равные углы, не превышающие 60o, и в каждый лучевой отрезок включен регулятор тока, измерительный выход которого соединен с управляющим входом через блок измерения и регулировки тока, а также содержащем связанные с ЭВМ измерители электрической и магнитной составляющих поля, подключенные к соответствующим датчикам, согласно изобретению предлагается увеличить число генераторов тока до числа лучевых отрезков питающей линии, при этом каждый из генераторов тока соединен последовательно с соответствующим регулятором тока и подключен к второму концу соответствующего лучевого отрезка, а объединенные вторые концы всех лучевых отрезков соединены с одним из полюсов источника питания, другой полюс которого соединен с питающими электродами, расположенными в центральной части окружности, предлагается также ввести в устройство приемники спутниковой радионавигационной системы, первый выход одного из которых соединен с объединенными синхровходами генератора тока и блока управления и регулировки тока, первые входы других приемников соединены с синхровходами соответствующих измерителей, а вторые выходы этих приемников связаны с соответствующими ЭВМ. При этом каждый из регуляторов тока может быть выполнен в виде стабилизатора тока регулируемого.
В предлагаемом способе за счет построения геоэлектрического разреза вмещающей среды по результатам дополнительных зондирований обеспечивается возможность определить ожидаемые значения сигналов переходного процесса для случаев, когда полученный геоэлектрический разрез вмещает геоэлектрическую модель искомого объекта с различными параметрами, что позволяет сравнивать ожидаемые значения сигналов переходного процесса с измеренными значениями этих сигналов и тем самым повысить информативность исследований, а также позволяет точно определить параметры зондирующей установки (длину лучевых отрезков, их количество и ток в лучевых отрезках) и площадь опоискования и тем самым повысить производительность поисковых работ и избежать лишних затрат энергии.
Выполнение измерений сигнала переходного процесса магнитной составляющей поля после выключения тока, вводимого в землю с помощью двух диаметрально противоположных электродов, по профилям, перпендикулярным прямой, соединяющей эти питающие электроды, позволяет повысить достоверность информации о геоэлектрическом разрезе вмещающей среды.
Сравнение измеренных значений сигналов переходного процесса с ожидаемыми значениями этих сигналов на временах максимального проявления сигнала переходного процесса магнитной составляющей поля позволяет минимизировать влияние на результаты сравнения геологических помех, помех, обусловленных неточностью геометрии питающей установки и т.п.
Синхронизация периода импульсов тока, вводимого в землю, и моментов начала измерений сигналов переходного процесса с помощью высокоточной шкалы времени СРНС позволяет проводить измерения на ранних стадиях переходного процесса и тем самым осуществлять поиск геологических объектов, начиная от дневной поверхности.
Сравнение текущего амплитудного значения импульсов тока, подводимого к каждому из питающих электродов, расположенных по окружности, с заданной величиной и изменение этого значения до заданной величины в случае их несовпадения позволяет предотвратить нарушение осевой симметрии введения тока в землю, следовательно, понизить фон нескомпенсированного нормального магнитного поля.
В предлагаемом устройстве включение в каждый лучевой отрезок собственного генератора тока позволяет исключить применение мощных переключающих элементов, тем самым избавиться от нежелательных переходных процессов и повысить надежность работы устройства.
Введение в устройство приемников спутниковой радионавигационной системы позволяет осуществлять высокоточную привязку момента начала измерений переходного процесса к моменту выключения тока в лучевых отрезках питающей линии и тем самым проводить автономные измерения переходного процесса на всей площади опоискования и на значительных удалениях от центра установки.
Выполнение регуляторов тока в виде стабилизаторов тока регулируемых позволяет снизить уровень нескомпенсированного нормального поля и повысить точность регулировки токов в лучевых отрезках питающей линии.
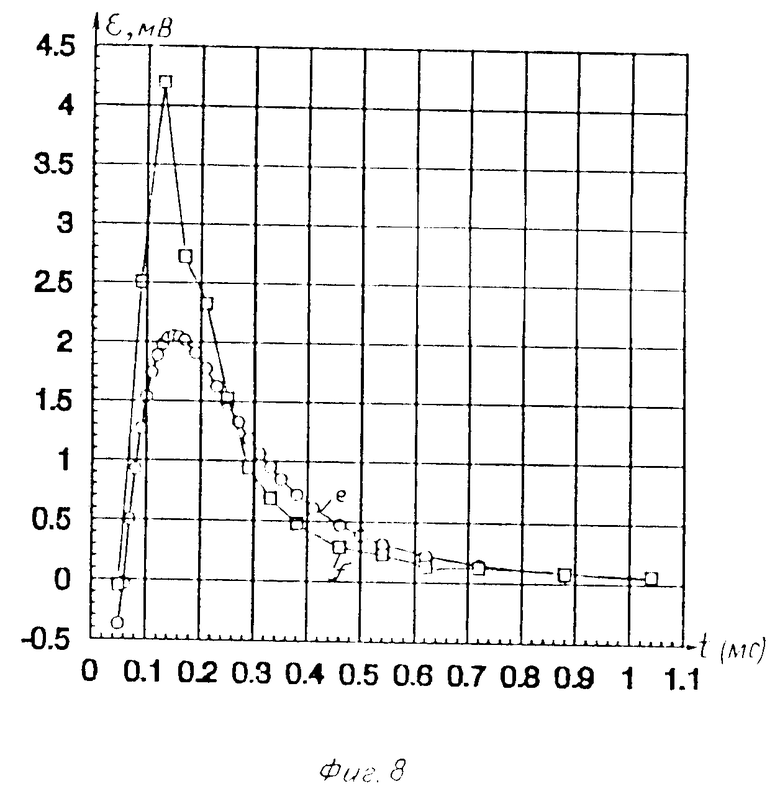
На фиг. 1 приведена структурная схема предлагаемого устройства для прямых поисков геологических объектов; на фиг. 2 - схема стабилизатора тока регулируемого; на фиг. 3 - схема блока измерения и регулировки тока; на фиг. 4 - схема измерителя; на фиг. 5 - схема размещения на местности устройства для прямых поисков геологических объектов; на фиг. 6 - графики ожидаемого сигнала переходного процесса и наблюдаемого сигнала переходного процесса в точке - кривые f и e соответственно; на фиг. 7 - карта изолиний наблюдаемого сигнала переходного процесса; на фиг. 8 - структурная схема устройства ближайшего аналога.
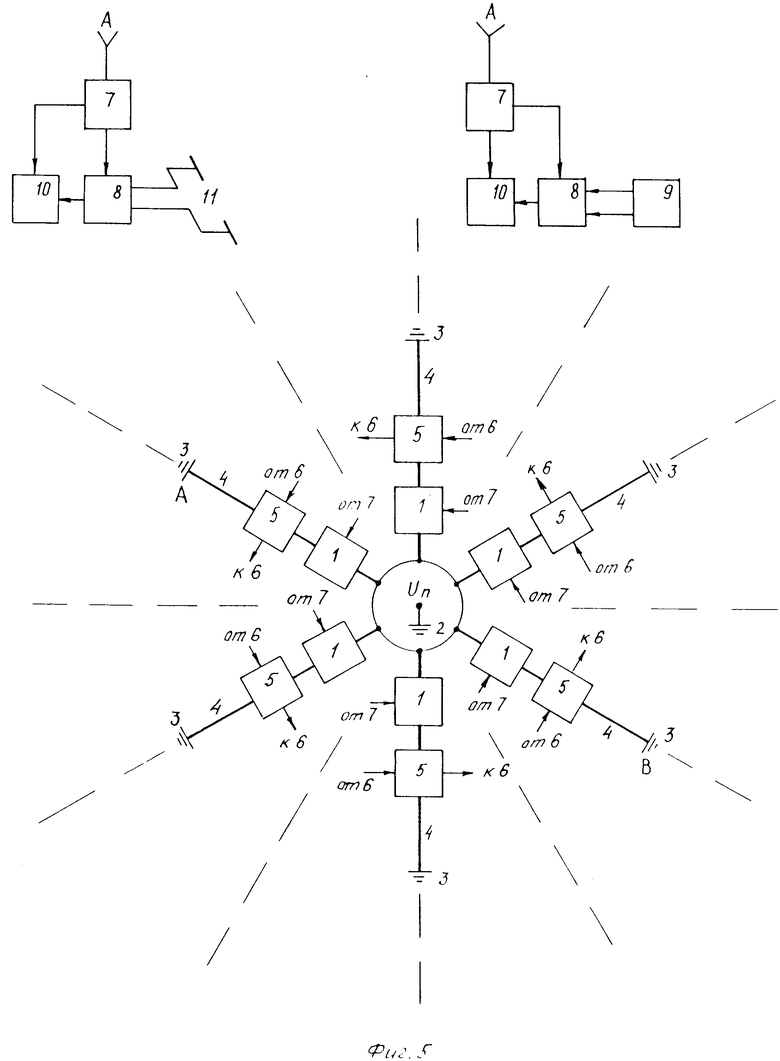
Устройство для прямых поисков геологических объектов (фиг. 1, 5) содержит источник питания U, генераторы 1 тока, питающий электрод 2, расположенный в центре окружности, образованной питающими электродами 3, лучевые отрезки 4 питающей линии, расположенные по радиусам этой окружности через равные углы, не превышающие 60o. Одни концы лучевых отрезков 4 подключены к соответствующим питающим электродам 3, а другие концы объединены и подключены к одному из полюсов источника питания U, другой полюс которого подключен к питающему электроду 2. В каждый из лучевых отрезков 4 питающей линии включены соединенные последовательно стабилизатор 5 тока регулируемый и генератор 1 тока. Измерительный выход каждого стабилизатора 5 тока регулируемого соединен с его управляющим входом через блок 6 измерения и регулировки тока. Вход синхронизации блока 6 объединен с входами синхронизации генераторов 1 тока и подключен к первому выходу одного из приемников 7 эталонного сигнала времени и частоты спутниковой радионавигационной системы (СРНС). Первые входы других приемников 7 соединены с синхровходами соответствующих измерителей 8, подключенных к датчикам 9 магнитной составляющей поля и датчикам 11 электрической составляющей поля соответственно, а вторые выходы приемников 7 связаны с соответствующими входами переносных ЭВМ 10, каждая из которых соединена с соответствующим измерителем 8.
Генератор 1 тока (трансмиттер) может, например, представлять собой тиристорный коммутатор, выполненный по триггерно-мостовой схеме, приведенной в книге "Геофизические и геодезические методы и средства при поисках полезных ископаемых в Сибири", СНИИГГиМС, 1982, с. 46-50.
Лучевые отрезки 4 питающей линии, как и вся питающая линия, выполнены из геофизического провода типа ГПМП.
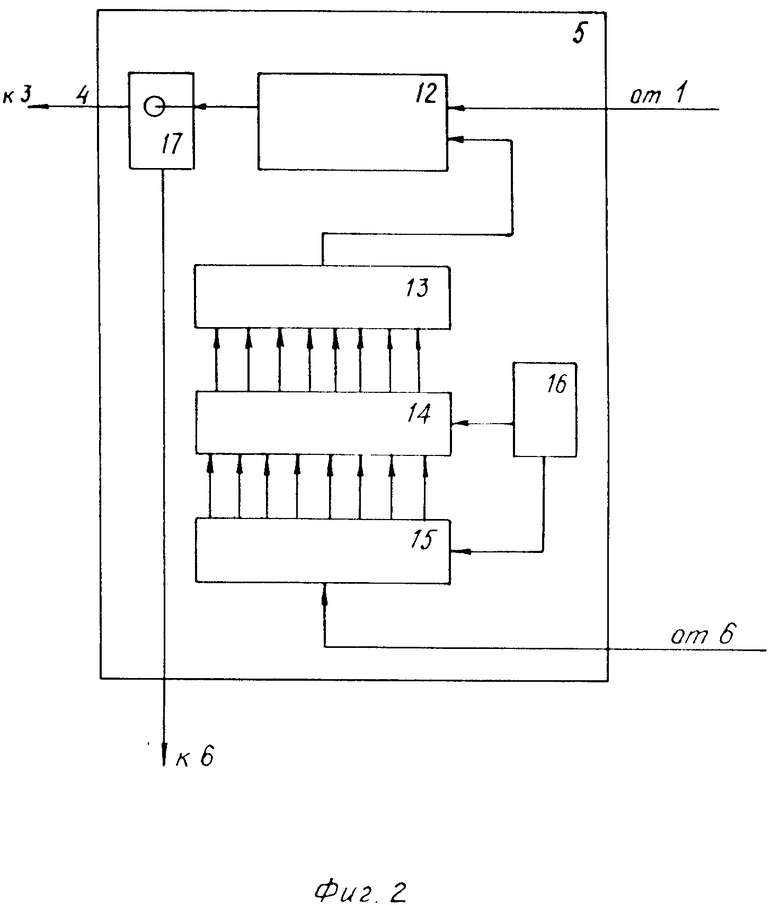
Стабилизатор 5 тока регулируемый (фиг. 2) содержит стабилизатор 12 тока, выполненный, например, по схеме двойного регулирования, приведенной в книге С. Д. Додика "Полупроводниковые стабилизаторы постоянного напряжения и тока", 1980, М.: Советское радио. Управляющий вход стабилизатора 12 соединен через цифроаналоговый преобразователь (ЦАП) 13 и буферный регистр 14 с регистром 15. Тактовый вход регистра 15 соединен с выходом кварцевого генератора 16. Управляющим входом стабилизатора 5 тока регулируемого является вход регистра 15, соединенный с соответствующим выходом блока 6 измерения и регулировки тока.
Входом стабилизатора 5 тока регулируемого является вход стабилизатора 12 тока, который соединен с выходом генератора 1, а выходом стабилизатора 5 тока является выход стабилизатора 12 тока, соединенный с лучевым отрезком 4. Измерительным выходом стабилизатора 5 является выход датчика 17, вход которого соединен с выходом стабилизатора 12 тока. ЦАП 13 может быть выполнен на основе интегральной схемы К572ПА1, регистр 14 - на микросхеме К555ИР17, регистр 15 - на микросхеме К561ИЕ10, а кварцевый генератор 16 - на микросхеме К561АГ1. Датчик 17 может быть выполнен на основе эффекта Холла.
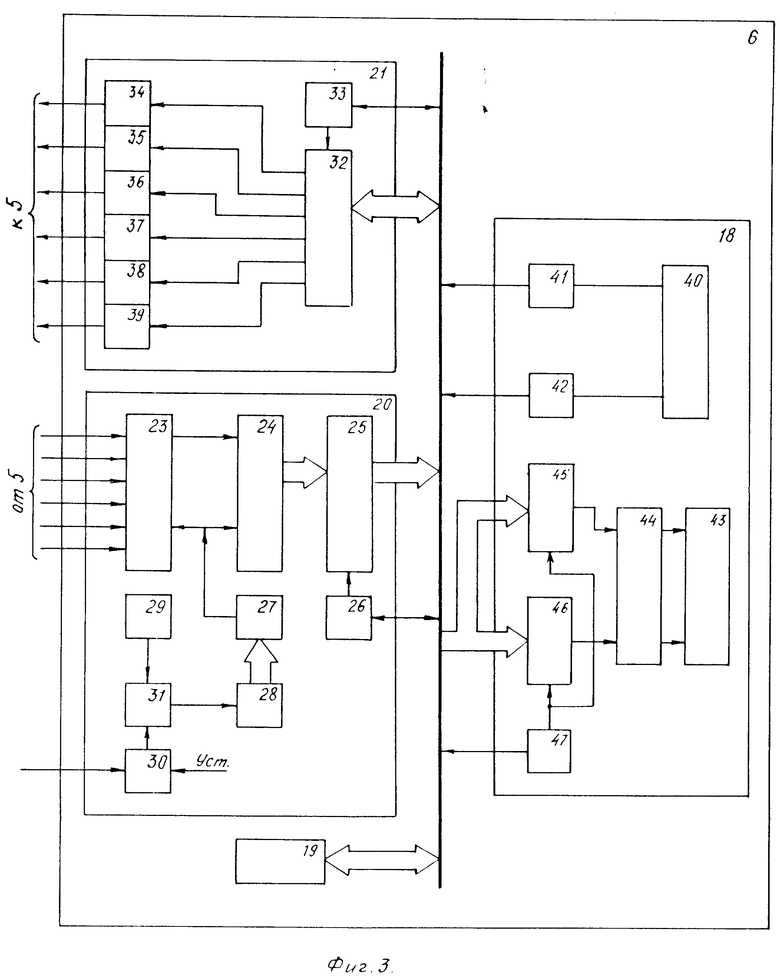
Блок 6 измерения и регулировки тока (фиг. 3) содержит пульт 18 управления, процессор 19, измеритель 20 тока и регулятор 21 тока, объединенные общей шиной 22. Измеритель 20 тока содержит аналоговый коммутатор 23, соединенный с аналого-цифровым преобразователем (АЦП) 24, и регистр 25 данных, соединенный с общей шиной 22 и с выходом селектора 26 адреса, который соединен с общей шиной 22. Управляющие входы коммутатора 23 и АЦП 24 соединены через цифровой коммутатор 27 со сдвиговым регистром 28. Кварцевый генератор 29 и триггер 30 соединены с входом регистра 28 через схему 31 И-НЕ. Вход триггера 30 является входом синхронизации блока 6 и входом измерителя 20. Входы коммутатора 23 являются измерительными входами блока 6 и, соответственно, входами измерителя 20.
Регулятор 21 тока содержит регистр 32 данных, соединенный с общей шиной 22 непосредственно и через селектор 33 адреса. Входы регистра 32 данных соединены с буферными формирователями 34 - 39. Выходы буферных формирователей 34 - 39 являются выходами регулятора 21 и одновременно выходами блока 6 измерения и регулировки тока и соединены с управляющими входами соответствующих стабилизаторов 5.
Пульт 18 управления содержит клавиатуру 40, соединенную с общей шиной 22 через преобразователи 41, 42 кода, индикатор 43, соединенный с общей шиной 22 через схему 44 управления, и регистры 45, 46 данных, адресные входы которых соединены с общей шиной 22 через селектор 47 адреса.
Аналоговый коммутатор 23 может быть выполнен на микросхеме К590КН1, АЦП 24 - на микросхеме К1108ПА1, а регистр 25 - на микросхеме К155ИР17. Селектор 26 адреса выполнен на микросхеме К588ВТ1, цифровой коммутатор 27 - на микросхеме К561КП2, сдвиговый регистр 28 - на микросхеме К561ИЕ10, а кварцевый генератор 29 - на основе микросхемы К561ЛЕ10. Триггер 30 выполнен на микросхеме К561ТМ2, а схема 31 И-НЕ - на микросхеме К561ЛА9.
Регистр 32 данных может быть выполнен на микросхеме К555ИР27, селектор 33 адреса - на микросхеме К555ИД7, а буферные формирователи 34-39 - на микросхемах К155ЛП9.
Клавиатура 40 выполняется на переключателях ПББК-2. Преобразователи 41, 42 кода клавиатуры выполнены на микросхемах К561ЛН1. Индикатор 43 выполнен на основе жидкокристаллического индикатора ИЖВ 71-96х8. Схема 44 управления индикатором 43 выполнена на микросхемах К555ИД10, регистры 45, 46 данных - на микросхемах К561ИР6, а селектор 47 адреса - на микросхеме К588ВТ1.
Процессор 19 выполнен на базе стандартных элементов персональной ЭВМ IBM PC AT, таких как оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ) и микропроцессор.
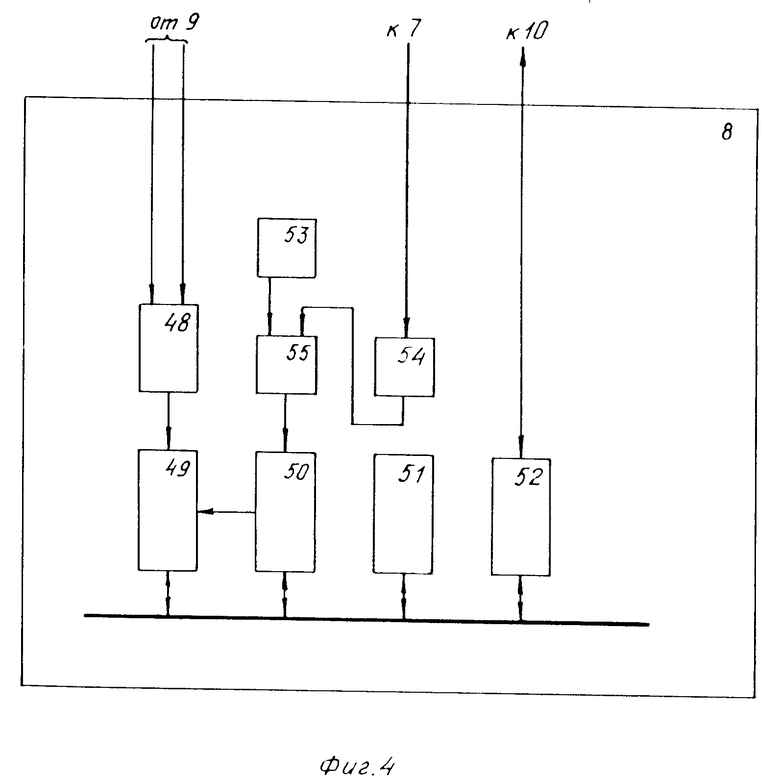
Измерители 8 магнитной и электрической составляющих поля выполнены по одинаковой схеме и отличаются только величиной входного сопротивления, которое больше у того измерителя, который подключен к датчику 11, представляющему собой приемную линию MN. Каждый измеритель 8 содержит предусилитель 48, соединенный последовательно с АЦП 49, вход запуска которого соединен с блоком 50 времени, связанным через магистраль с АЦП 49, процессором 51 и приемопередатчиком 52. При этом кварцевый генератор 53 и триггер 54 соединены с входом блока 50 времени через схему И-НЕ 55. Входы предусилителя 48 являются измерительными входами измерителя 8, вход триггера 54 - входом синхронизации измерителя 8, а вход и выход приемопередатчика 52 являются информационными входом и выходом измерителя 8. Предусилитель 48 может быть выполнен на микросхеме К140УД14, АЦП 49 выполнен по схеме поразрядного уравновешивания на основе микросхемы К1108ВА1. Блок 50 времени выполнен на счетчиках К561ИЕ11. Процессор 51 выполнен аналогично процессору 19 блока 6 измерения и регулировки тока. Приемопередатчик 52 реализован на основе микросхемы К580ВВ51.
Приемник 7 спутниковой радионавигационной системы может быть приемником типа SVeeSix Plus (Trimble Navigation, США).
Индукционные датчики 9 и датчики 11, проставляющие собой приемные линии MN, выполнены из геофизического провода типа ГПСМПО.
Предлагаемый способ прямых поисков геологических объектов осуществляется следующим образом.
Исходя из конкретной решаемой геофизической задачи, определяют размеры и количество лучевых отрезков 4 кругового электрического диполя и амплитуду импульсов тока генераторов 1, обусловленную глубинностью исследований. В соответствии с фиг. 5 производят расстановку устройства на местности. При этом заземляют питающий электрод 2 в центре окружности, образованной равномерно заземленными питающими электродами 3. Питающие электроды 3, количество которых должно быть не менее 6, подключают к одним концам лучевых отрезков 4 питающей линии, которые располагают по радиусам окружности через одинаковый угол, не превышающий 60o. В каждый лучевой отрезок 4 включают соединенные последовательно генератор 1 тока и стабилизатор 5. Вторые концы лучевых отрезков 4 соединяют между собой и подключают к одному из полюсов источника питания U. Другой полюс источника питания U соединяют с питающим электродом 2. За пределами окружности, образованной электродами 3, по профилям, построенным на продолжении радиусов, расходящихся из центра окружности, размещают датчики 9, 11, которые подключают к соответствующим измерителям 8, каждый из которых связан с ЭВМ 10.
На первом этапе исследований производят зондирования, при которых в два лучевых отрезка 4, подключенных к диаметрально противоположным питающим электродам 3 и образующих питающую линию AB, подают токи одинаковой величины с помощью соответствующих генераторов 1 тока. Величины токов контролируют с помощью блока 6 и уравнивают с помощью стабилизаторов 5 тока регулируемых. Период импульсов тока генераторов 1 синхронизируют с эталонным сигналом, поступающим от приемника 7 СРНС. После выключения каждого импульса тока измеряют сигнал переходного процесса магнитной составляющей поля с помощью измерителя 8, подключенного к датчику 9, при этом измерения ведут по профилям, перпендикулярным питающей линии AB. По результатам этих измерений сигнала строят по стандартной методике геоэлектрический разрез вмещающей среды.
Далее с помощью математического моделирования определяют ожидаемые значения сигналов переходного процесса электрической и магнитной составляющих поля, обусловленного КЭД, для случая, когда полученный геоэлектрический разрез содержит геоэлектрическую модель искомого геологического объекта, при этом варьируют в заданных пределах его параметры: проводимость, форму, размеры, глубину залегания, удаление от центра кругового электрического диполя.
Затем выполняют основные (рядовые) зондирования, подавая во все лучевые отрезки 4 равные токи, и измеряют значения сигнала переходного процесса магнитной составляющей поля по профилям, расположенным на продолжении радиусов кругового электрического диполя. Наличие сигнала переходного процесса магнитной составляющей поля свидетельствует о наличии искомого геологического объекта. Для оконтуривания объекта проводят более детальные измерения сигналов переходного процесса электрической и магнитной составляющих поля и по результатам измерений строят рельеф поля над объектом на времени максимального проявления сигнала переходного процесса магнитной составляющей поля, обусловленного геологическим объектом. После этого сравнивают реальные измененные значения сигналов переходного процесса электрической и магнитной составляющих поля с ожидаемыми значениями этих сигналов, при этом в большинстве случаев наиболее эффективным является сравнение реальных и ожидаемых значений сигналов на временах максимального проявления сигнала переходного процесса магнитной составляющей поля. По результатам сравнения судят о наличии или отсутствии в исследуемой среде искомого объекта, а также о его параметрах. Для этого проводят более детальное математическое моделирование, добиваясь с помощью варьирования параметров геоэлектрической модели искомого объекта качественного и количественного соответствия между реальными измеренными значениями сигналов и модельными данными.
Работа устройства, осуществляющего предлагаемый способ, координируется управляющими программами, записанными в ПЗУ процессора 19 блока 6 и в ПЗУ процессоров 51 измерителей 8.
После включения питания на входы синхронизации генераторов 1 тока, блока 6 и измерителей 8 с выходов "1 с" приемников 7 СРНС поступает эталонный сигнал времени и частоты, представляющий собой последовательность импульсов, период которых составляет 1 с, а длительность - 1 мкс. Импульс синхронизации включает генераторы 1 тока и в лучевые отрезки 4 подается импульс тока.
Процессор 19 блока 6 начинает выполнять программу "Регулировка токов". При этом с пульта 18 управления блока 6 оператором с помощью клавиатуры 40 задается значение амплитуды импульсов тока в лучевых отрезках 4. Заданное значение амплитуды импульсов тока передается по команде процессора 19 через преобразователи 41, 42 кода и общую шину 22 через регистры 45, 46 данных, схему 44 управления и отображается на индикаторе 43, а коды управления через регистр 32 данных и буферные формирователи 34 - 39 поступают на управляющие входы стабилизаторов 5 тока регулируемых. Селектор 33 адреса регулятора 21 блока 6 задает поочередно адреса стабилизаторов 5, последовательный код заданного значения амплитуды тока поступает на вход регистра 15 стабилизатора 5, тактовый вход которого соединен с кварцевым генератором 16. Последовательный код преобразуется в параллельный и через буферный регистр 14 поступает на входы ЦАП 13, который вырабатывает управляющее напряжение, эквивалентное входному коду. Под действием управляющего напряжения стабилизатор 12 тока поддерживает заданное значение амплитуды импульса тока в лучевом отрезке 4. Ток в лучевых отрезках 4 наводит в датчиках 17, работа которых основана на эффекте Холла, напряжение, пропорциональное току, и поступает на вход многоканального измерителя 20 тока блока 6. Одновременно с включением тока в генераторах 1 импульс синхронизации с выхода "1 с" приемника 7 СРНС поступает на вход триггера 30, который является входом синхронизации блока 6. При нажатии кнопки "Пуск" на пульте управления блока 6 на вход "Уст." триггера 30 поступает импульс, который разрешает прохождение тактовых импульсов от генератора 29 через схему И-НЕ схему на вход сдвигового регистра 28, который через цифровой коммутатор 27 поочередно подключает входы аналогового коммутатора 23 к АЦП 24. С выхода АЦП 24 коды значений токов в каждом лучевом отрезке 4 поочередно записываются в регистр 25 данных. Селектор 26 адреса присваивает измеренным значениям токов соответствующие адреса и коды токов поступают в общую шину 22. Процессор 19 поочередно сравнивает код заданного значения тока на клавиатуре пульта 18 управления с кодами измеренных значений токов в лучевых отрезках 4. Если коды равны, то управляющее напряжение на выходе ЦАП 13 блока 6 остается неизменным, если нет, то управляющее напряжение изменяется в соответствии с результатом сравнения в блоке 6 измерения и регулировки тока. За один период импульсов синхронизации, равный 1 с, происходит измерение токов во всех лучевых отрезках 4 и выдача регулирующих кодов для всех стабилизаторов 5. Таким образом, происходит стабилизация текущего значения амплитуды токовых импульсов в лучевых отрезках 4.
Эталонный сигнал времени и частоты поступает от СНРС одновременно на входы всех приемников 7, выходы которых связаны с измерителями 8. С выхода каждого из этих приемников 7 эталонный сигнал с периодом 1 с поступает на вход триггера 54, являющийся входом синхронизации измерителя 8. Процесс измерения в измерителе 8 начинается с нажатия клавиши "Enter" на пульте ЭВМ 10, после чего триггер 54 устанавливается в исходное положение и с приходом первого импульса синхронизации разрешает прохождение тактовых импульсов от кварцевого генератора 53 через схему И-НЕ 55 на вход блока 50 времени, который через время, равное длительности токового импульса, разрешает работу АЦП 49 в соответствии со шкалой времени измерения переходного процесса, которая программируется в блоке 50 времени с помощью переносной ЭВМ 10 непосредственно перед началом работы предлагаемого устройства. Сигналы от индукционного датчика 10 или датчика 11 поступают на входы АЦП 49 через предусилитель 48. Процессор 51 в соответствии с временной шкалой опрашивает выход АЦП 49 и через приемопередатчик 52 пересылает их в ЭВМ 10. После повторения заданного количества циклов измерений в ЭВМ 10 процесс измерения останавливается и результаты измерений записываются на магнитный носитель в заданном формате, включающем координаты точки на профиле, которые определяются с помощью приемника 7 СРНС и через интерфейс передаются в ЭВМ 10. Затем измерители 8 и датчики перемещаются по профилю на заданное расстояние и процесс измерения электрической и магнитной составляющих поля повторяется. После проведения измерений на всей исследуемой площади результаты измерений обрабатывают и строят рельеф поля на времени максимального проявления магнитной составляющей. Затем сравнивают рельеф, построенный по результатам измеренных значений, с рельефом, построенным по результатам математического моделирования, т. е. по ожидаемым значениям сигналов переходного процесса. По результатам сравнения судят о наличии искомого объекта и его параметрах.
В рассмотренном примере период токовых импульсов равен периоду эталонного сигнала. В принципе, в предлагаемом устройстве могут быть реализованы с помощью соответствующих управляющих программ и любые другие значения периода токовых импульсов, так, например, период токовых импульсов может быть кратным целому числу n периодов эталонного сигнала, либо кратным 1/n.
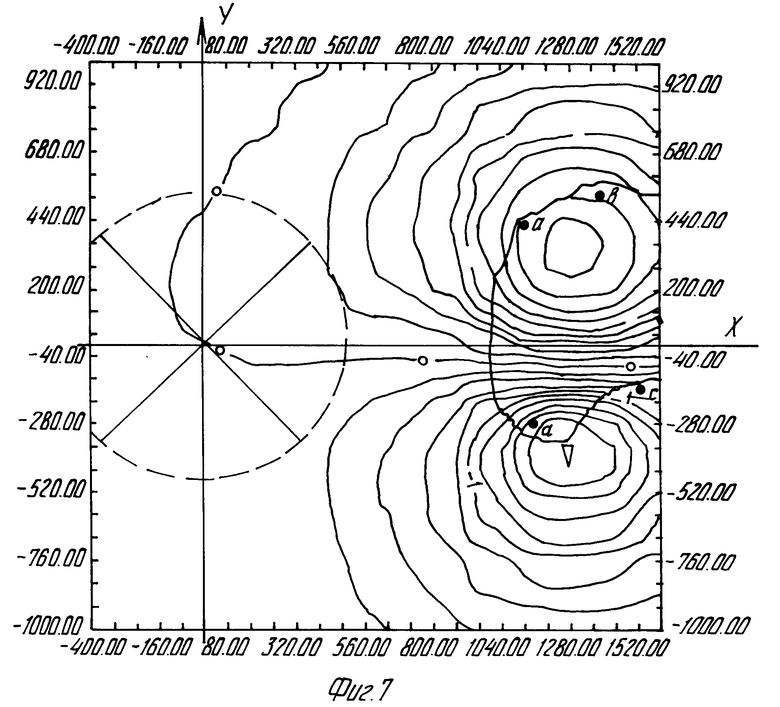
Примером практического применения предлагаемого способа и устройства для его осуществления могут служить экспериментальные работы, проведенные авторами в ноябре 1995 года на медно-никелевом оруднении Прутовской интрузии (Житомирская обл. , республика Украина) совместно с геологическим объединением "Севукргеология". По данным ЗСБ строился геоэлектрический разрез вмещающей среды и выполнялось математическое моделирование исследуемого объекта - рудного тела, залегающего на глубине от 400 до 600 м и на удалении 1000 м от центра питающей установки, т.е. точки зондирования. После этого проводились основные зондирования при помощи КЭД. Результаты моделирования и реальных наблюдений представлены на фиг. 7, 8. На фиг. 7 показаны условно место расположения и размер питающей установки, т.е. кругового электрического диполя. По результатам моделирования построен рельеф поля над объектом в плане (тонкие линии) и контур рудного тела, проходящий через точки а, b, c, d, показывающие максимальные измеренные значения сигналов и соответствующие краю рудного тела. На фиг. 8 показаны графики ожидаемых значений сигнала магнитной составляющей поля (график e) и реального сигнала (график f). Графики показывают практическое совпадение сигналов во времени. Данные моделирования и практических измерений были подтверждены результатами бурения.
Таким образом предлагаемый способ прямых поисков геологических объектов и устройство для его осуществления позволяют с высокой степенью точности смоделировать поисковую ситуацию с учетом приповерхностных неоднородностей, которые присутствуют в геоэлектрическом разрезе, и особенностей самого геоэлектрического разреза при определении ожидаемых параметров сигнала от объекта. Высокоточная синхронизация от СРНС, связанной с государственным или национальным стандартом времени и частоты, позволяет проводить площадные поисковые и разведочные работы при значительном удалении измерителей от питающей установки и тем самым исключить их взаимное влияние друг на друга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЯМЫХ ПОИСКОВ ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2028648C1 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ПОИСКА ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2454683C1 |
| СПОСОБ ПРЯМОГО ПОИСКА ЛОКАЛЬНЫХ ОБЪЕКТОВ НА ШЕЛЬФЕ МИРОВОГО ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ОТКРЫТОМ МОРЕ | 1995 |
|
RU2116658C1 |
| СПОСОБ ПРЯМЫХ ПОИСКОВ ЛОКАЛЬНЫХ ОБЪЕКТОВ | 1995 |
|
RU2112995C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1993 |
|
RU2084929C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2453872C1 |
| СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434251C1 |
| СПОСОБ ПРЯМОГО ПОИСКА УГЛЕВОДОРОДОВ МЕТОДАМИ ГЕОЭЛЕКТРИКИ | 2019 |
|
RU2721475C1 |
| СПОСОБ ПОИСКА ТРЕХМЕРНЫХ ОБЪЕКТОВ МЕТОДАМИ ГЕОЭЛЕКТРИКИ ТМ-ПОЛЯРИЗАЦИИ | 2019 |
|
RU2733095C2 |
| Способ электроразведки для изучения трехмерных геологических структур | 2017 |
|
RU2676396C1 |
Использование: для прямого поиска локальных геологических объектов. Сущность изобретения: зондируют исследуемую среду путем осесимметричного введения в Землю тока импульсной формы с помощью генераторов 1 тока, питающего электрода 2, расположенного в центре окружности, образованной питающими электродами 3, соединенными с электродом 2 лучевыми отрезками 4 питающей линии, измеряют сигналы переходного процесса магнитной и электрической составляющих поля, дополнительно зондируют среду путем введения тока с помощью двух диаметрально противоположных питающих электродов 3, образуя питающую линию АВ, по результатам дополнительных зондирований строят геоэлектрический разрез вмещающей среды и определяют ожидаемые значения сигналов переходного процесса для случая, когда полученный разрез вмещает модель искомого объекта с различными параметрами. По результатам сравнения измеренных и ожидаемых сигналов переходного процесса судят о наличии или отсутствии в исследуемой среде искомого объекта и его параметрах. При этом период импульсов тока, вводимого в Землю, и моменты начала измерений синхронизируют с эталонным сигналов времени и частоты приемников 7 спутниковой радионавигационной станции, а амплитудное значение импульсов тока синхронизируют с помощью регулируемых стабилизаторов 5 тока. 2 с. и 5 з.п. ф-лы, 8 ил.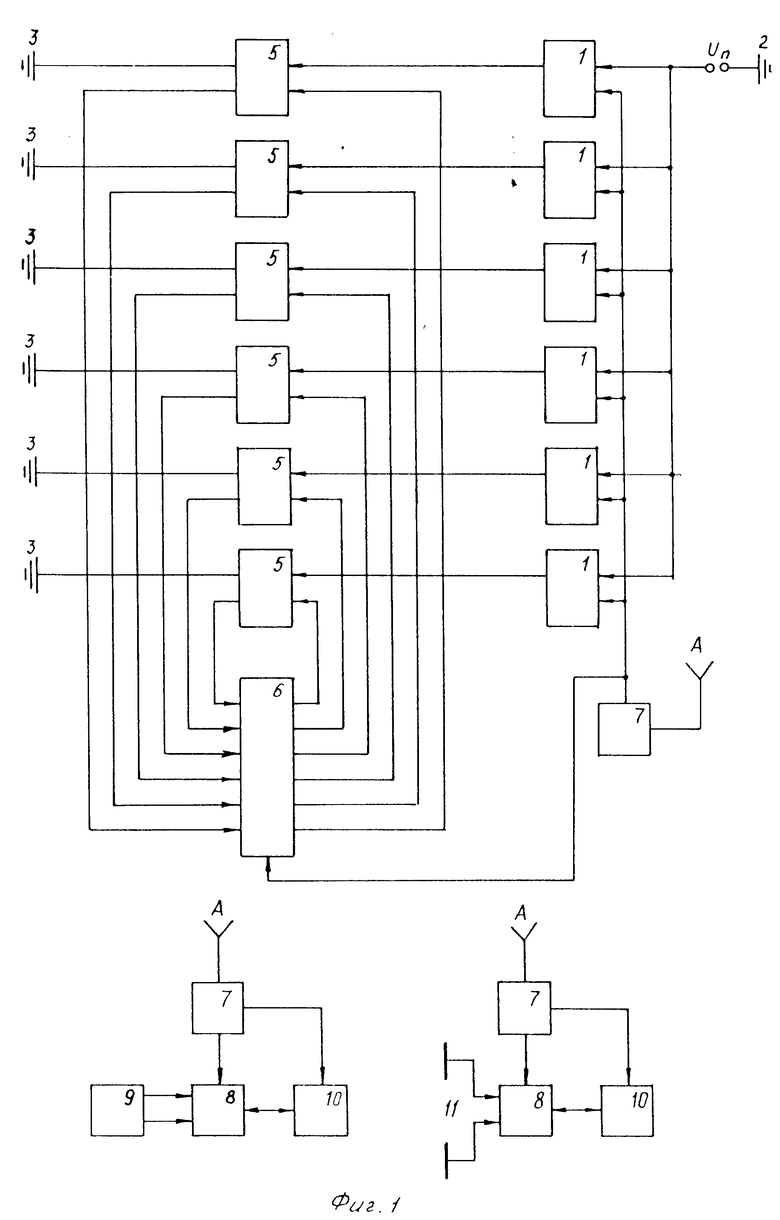
| PL, патент, 131907, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Могилатов В.С., Балашов Б.П | |||
| Физика Земли, N 6, 1994, с.73 - 79. | |||

