Изобретение относится к приборостроению и может быть использовано в приборах для определения топографических координат и для ориентирования на местности человека, передвигающегося пешком.
Известно переносное индивидуальное навигационное устройство для слепых [1] , содержащее вычислительное устройство, шагомер, пульт управления. Кроме этого, устройство содержит запоминающее устройство данных о маршруте движения, запоминающее устройство программ, переключатель режимов и микрофон. Недостатком известного устройства является ограниченная область применения, заключающаяся в возможности использования устройства только на заранее известном маршруте движения - для ориентирования людей с ограниченной степенью зрения и слепых.
Наиболее близкой по технической сущности к предлагаемому изобретению является система автоматической ориентации для путешественников и слепых [2] - прототип.
Устройство-прототип содержит датчик угловой ориентации, датчик шага, соединенные с соответствующими входами вычислительного устройства, блок индикации и пульт управления, выход которого соединен с входом вычислительного устройства, один из выходов которого соединены одновременно с входами блока индикации и пульта управления. Выходы блока индикации соединены с входами акустического датчика и вибрационного датчика соответственно.
Кроме того, устройство содержит дополнительное запоминающее устройство, подсоединенное к соответствующему входу вычислительного устройства, а также электронные часы, внешний датчик шага с соединительным устройством для подключения к соответствующему входу вычислительного устройства.
Известное устройство обеспечивает достаточно высокую точность определения координат человека при возвращении в начальный пункт маршрута движения. При этом весь маршрут фактически разбивается на отдельные отрезки, длиной не более нескольких сот метров. Координаты всех конкретных точек маршрута движения измеряются и запоминаются устройством при движении человека из начального пункта. При возвращении в начальный пункт человек движется от одной контрольной точки до другой, причем в каждой точке проводится коррекция ошибок, полученных на предыдущем отрезке.
Однако в большинстве практических случаев протяженность маршрута движения может составлять многие километры и даже десятки километров при отсутствии видимых ориентиров с известными координатами. Например, при движении в лесном массиве, ночью при проведении топогеодезических съемок на местности и т.п.
В этих случаях при использовании известного устройства ошибки измерения могут достигать недопустимой величины.
Можно выделить три основные причины погрешностей измерения:
1. Погрешности, связанные с подсчетом количества шагов и ошибками измерения азимутальных углов в статическом состоянии.
2. Рассогласование оси направления движения человека с направлением, измеряемым датчиком угловой ориентации.
3. Погрешности измерения азимутальных углов и длины шага человека, связанные с динамикой ходьбы.
Первый вид ошибок сводится к минимуму выбором типа датчика угловой ориентации и датчика шага. Так при использовании в качестве датчика угловой ориентации электронного жидкостного компаса, чувствительным элементом которого является круглый магнит, размещаемый на керновой опоре в герметичной капсуле с демпфирующей жидкостью, в статистическом состоянии может быть достигнута круговая среднеквадратическая погрешность измерения углов 0,5o. Использование в качестве датчика шага пьезорезонансного акселерометра (или подобного) обеспечивает надежную фиксацию момента шага человека при движении в различных условиях.
Второй вид ошибок сводится к минимуму надежной фиксацией навигационного прибора на корпусе человека (как правило на груди) и предварительной коррекцией на контрольном участке перед выходом на маршрут движения.
Наиболее сложными и трудноустранимыми являются погрешности третьего типа, связанные с изменением длины шага человека и ошибками измерения азимутальных углов, вызываемых динамическим воздействием при ходьбе на механическую систему датчика угловой ориентации.
При ходьбе человека возникают квазипериодические ускорения и угловые колебания в трех плоскостях, которые воздействуют на подвижные части датчика угловой ориентации. Максимальное воздействие возникает в моменты перехода фазы шага из одноопорной в двухопорную. Ускорение в этом случае достигает максимального значения, имеет сложный характер, что приводит к неконтролируемой закрутке катушки (магнита на керновой опоре, магнитной стрелки и т.п. ) электронного компаса. Все это вызывает большие ошибки измерения азимутальных углов в сравнении с измерениями в статическом состоянии. Подбором вязкости демпфирующей жидкости магнитного компаса можно в несколько раз уменьшить ошибки измерения, связанные с динамическим воздействием при ходьбе, но и в этом случае среднеквадратические ошибки составляют 3...4o. На точность работы навигационного прибора непосредственное влияние оказывает изменение в процессе ходьбы длины шага человека. В конечном итоге динамические угловые и путевые ошибки приводят к погрешностям измерения координат, которые достигают 4...5% и более от пройденного пути. Все это ограничивает область применения известного устройства.
Задача, на решение которой направлено предлагаемое изобретение, заключается в расширении области применения устройства путем повышения точности его работы.
Решение задачи достигается тем, что в навигационный прибор, содержащий датчик угловой ориентации, вычислительное устройство, блок индикации, пульт управления, выход которого соединен с первым входом вычислительного устройства, второй вход которого соединен с выходом датчика угловой ориентации, блок измерения длины шага, выход которого соединен с третьим входом вычислительного устройства, выход которого соединен с входами блока индикации и пульта управления, введены формирователь сигнала считывания и датчик вертикального ускорения, выход которого соединен с входом блока измерения длины шага и входом формирователя сигнала считывания, выход которого соединен с входом вычислительного устройства.
Введение в известное устройство формирователя сигнала считывания, датчика вертикального ускорения и новых связей обеспечивает повышенную точность работы устройства путем уменьшения погрешностей измерения азимутальных углов направления движения и длины шага при ходьбе.
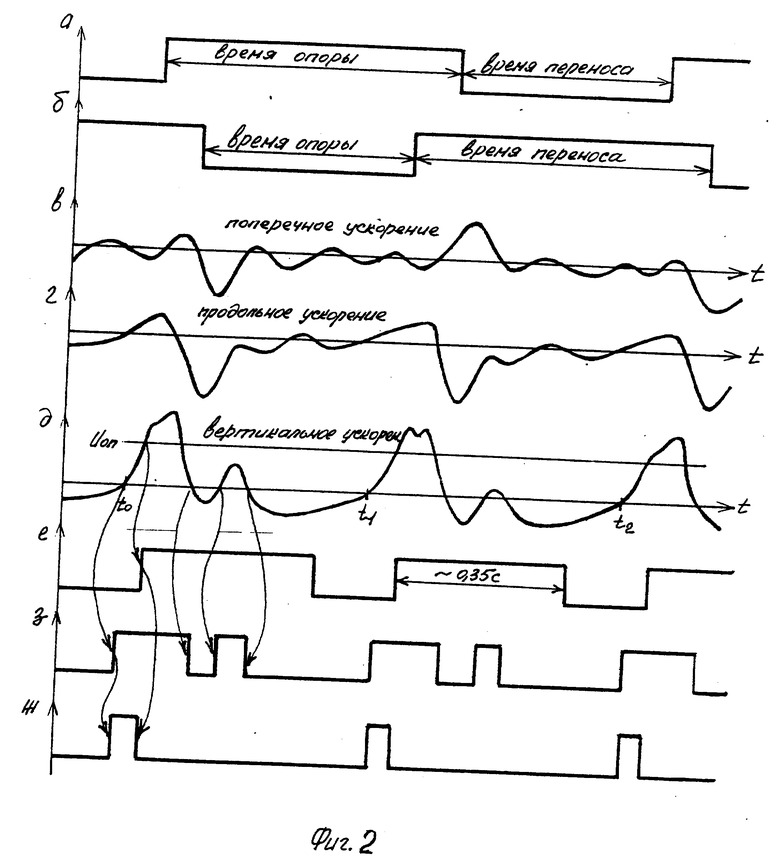
На фиг. 1 представлена структурная схема навигационного прибора; на фиг. 2 - временные диаграммы работы формирователя сигнала считывания.
Предлагаемый навигационный прибор содержит датчик угловой ориентации I, вычислительное устройство 2, выход которого соединен с входами блока индикации 3 и пульта управления 4, выход которого соединен с первым входом вычислительного устройства 2, второй вход которого соединен с выходом датчика угловой ориентации I и блок измерения длины шага 5, выход которого соединен с третьим входом вычислительного устройства 2.
Кроме этого, навигационный прибор содержит формирователь сигнала считывания 6, выход которого соединен с входом вычислительного устройства 2, и датчик вертикального ускорения 7, выход которого соединен с входом блока измерения длины шага 5 и входом формирователя сигнала считывания 6.
Формирователь сигнала считывания 6 содержит первый и второй компараторы 8 и 9, первые входы которых объединены и являются входом формирователя 6, на второй вход первого компаратора 8 подается опорное напряжение, второй вход второго компаратора 9 соединен с общей шиной, выход первого компаратора 8 через формирователь длительности импульса 10 подключен к первому входу элемента ИЛИ-НЕ 11, выход второго компаратора через элемент НЕ 12 подключен к второму входу элемента ИЛИ-НЕ 11, выход которого является выходом формирователя длительности импульса 6.
Работа устройства в общем случае основана на измерении на каждом шаге человека азимутального угла направления движения и измерении длины шага с обработкой по заданным алгоритмам измеренной информации для определения прямоугольных координат человека, а также ориентирования на местности по направлению и определения дальностей и дирекционных (азимутальных) углов до контрольных пунктов с известными координатами.
Навигационный прибор с помощью индивидуального снаряжения закрепляется на груди оператора (человека) таким образом, чтобы приборная ось, совпадающая с измерительной осью датчика угловой ориентации, была в направлении движения.
В начальной точке маршрута оператор с пульта управления 4 вводит в вычислительное устройство 2 исходные данные - координаты начальной точки, координаты пункта назначения (контрольных пунктов), коэффициенты шага и т.п. , контролируя вводимые значения с помощью блока индикации 3.
Во время движения по маршруту датчик вертикального ускорения 7 непрерывно вырабатывает сигнал, пропорциональный вертикальному ускорению туловища человека. Этот сигнал поступает на вход блока измерения длины шага 5 и на вход формирователя сигнала считывания 6. Блок вырабатывает код, пропорциональный длине шага, а формирователь 6 на каждом шаге в заданный момент времени вырабатывает прямоугольный импульс, по переднему фронту которого вычислительное устройство 2 считывает с блока измерения длины шага 5 код шага, а с датчика угловой ориентации I - значение азимутального угла направления движения.
Расчет прямоугольных координат проводится вычислительным устройством 2 в соответствии с уравнениями: ,
,
где
x, y - координаты оператора;
x0, y0 - координаты начальной точки маршрута движения, вводятся с пульта 4 оператором;
Li - измеренное значение длины шага оператора;
AMi - значение азимутального угла направления движения, измеряемое на каждом шаге;
ΔAм - значение поправки направления, равное алгебраической разности магнитного склонения и сближения меридианов, вводится с пульта 4.
Кроме основного назначения - определение координат оператора - навигационный прибор может быть использован для ориентирования по направлению, измерения пройденного пути, определения в любой точке маршрута дальностей и дирекционных углов до контрольных пунктов с известными координатами и т.п.
Одной из основных причин, снижающих точность работы навигационного прибора, являются ошибки измерения азимутальных углов, связанные с динамикой ходьбы человека. На фиг. 2а, б, в, г, д приведены временные диаграммы фазы шага человека и возникающих при этом линейных ускорений туловища в поперечной, продольной и вертикальной плоскостях. Цикл ходьбы включает два одиночных шага или один двойной шаг. Для двойного шага можно выделить фазу одноопорного и двухопорного движения (фиг. 2а,б). Максимальные ускорения и, соответственно, силы, действующие на подвижные механические элементы датчика угловой ориентации I, возникают в момент перехода из одноопорной фазы шага в двухопорную, постепенно снижаясь в течение 0,3...0,4 с (фиг. 2в, г, д). В моменты времени t0, t1, t2 (фиг. 2, д), предшествующие началу двухопорной фазы, ускорения минимальны, чувствительный элемент датчика угловой ориентации I (магнит на керновой опоре) находится в относительном покое. Именно указанные моменты времени являются оптимальными для считывания информации с датчика угловой ориентации. Немаловажным фактором является и то, что в эти моменты времени рассогласование по углу измерительной оси прибора, расположенного на груди оператора, и направления движения минимальны. В другие моменты времени отклонения туловища от направления движения могут достигать до ± 10,0. И хотя угловые ошибки, вызванные указанными отклонениями, усредняются на нескольких шагах, они все же вносят ошибки при расчете координат в соответствии с уравнениями (1).
Формирователь 6 обеспечивает в оптимальный момент фазы шага считывание значения азимутального угла. Работает формирователь 6 следующим образом.
С датчика вертикального ускорения 7 непрерывно поступает при ходьбе сигнал (фиг. 2, д) на вход формирователя 6 и, соответственно, на первые входы первого и второго компараторов 8 и 9. На второй вход первого компаратора 8 поступает опорное напряжение, соответствующее 0,25...0,30 g (g - ускорение силы тяжести). При превышении вертикальным ускорением значения 0,25...0,30 g первый компаратор 8 вырабатывает сигнал, который запускает формирователь длительности импульса 10, с выхода которого на первый вход элемента ИЛИ-НЕ 11 поступает на каждом шаге одиночный прямоугольный импульс длительностью 0,35 с (фиг. 2,е). Второй компаратор 9 обеспечивает выработку прямоугольных импульсов при изменении знака сигнала вертикального ускорения (фиг.2). Эти импульсы через элемент НЕ 12 поступают на второй вход элемента ИЛИ-НЕ 11, который обеспечивает формирование на каждом шаге человека одиночных импульсов, передний фронт которых совпадает с моментами времени t0, t1, t2.., предшествующими началу двухопорной фазы шага (фиг. 2д, ж). Именно в эти моменты времени, оптимальные для считывания кода угла, вычислительное устройство 2 проводит опрос датчика угловой ориентации I, а также блока измерения длины шага 5.
Блок измерения длины шага 5 обеспечивает повышенную точность работы навигационного прибора за счет учета изменений длины шага человека, связанных с колебаниями темпа движения, усталостью человека, изменением типа грунта и нагрузки на человека. В качестве блока измерения длины шага 5 может быть использовано известное устройство, реализующее соотношение:
S = a/L2
где
S - амплитуда вертикального перемещения туловища человека;
L - длина шага;
a - величина, постоянная для каждого человека.
Значение S определяют путем двукратного интегрирования сигнала вертикального ускорения туловища человека, а значение постоянной a - по результатам калибровки на мерном участке.
Использование предлагаемого устройства позволяет расширить область применения навигационного прибора за счет повышения точности его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ ПРИБОР | 1999 |
|
RU2160431C2 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1993 |
|
RU2117391C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ЗАТУХАНИЯ МЕЖДУ АНТЕННАМ | 1995 |
|
RU2127889C1 |
| ЦИФРОВОЙ СОГЛАСОВАННЫЙ ФИЛЬТР СИГНАЛОВ С ДИСКРЕТНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 1992 |
|
RU2114514C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ АНТЕННЫ | 1995 |
|
RU2139549C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1994 |
|
RU2117392C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1994 |
|
RU2116699C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ АНТЕННЫ | 1994 |
|
RU2139548C1 |
| КОНТРОЛЛЕР ПАМЯТИ, КОТОРЫЙ ВЫПОЛНЯЕТ КОМАНДЫ СЧИТЫВАНИЯ И ЗАПИСИ НЕ В ПОРЯДКЕ ПРОСТОЙ ОЧЕРЕДИ | 1996 |
|
RU2157562C2 |
| ПРИЕМНАЯ АППАРАТУРА БАЗОВОЙ СТАНЦИИ СИСТЕМЫ РАДИОСВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1995 |
|
RU2113765C1 |
Навигационный прибор предназначен для определения топографических координат и ориентирования на местности человека, передвигающегося пешком. Навигационный прибор содержит датчик угловой ориентации, вычислительное устройство, блок индикации, пульт управления, выход которого соединен с первым входом вычислительного устройства, второй вход которого соединен с выходом датчика угловой ориентации датчик длины шага, выход которого соединен с третьим входом вычислительного устройства, выход которого соединен с входами блока индикации и пульта управления, формирователь сигнала считывания и датчик вертикального ускорения, выход которого соединен с объединенными входами датчика длины шага и формирователь сигнала считывания, выход которого соединен с четвертым входом вычислительного устройства. Расширена область применения путем повышения точности его работы 1 з. п. ф-лы, 2 ил.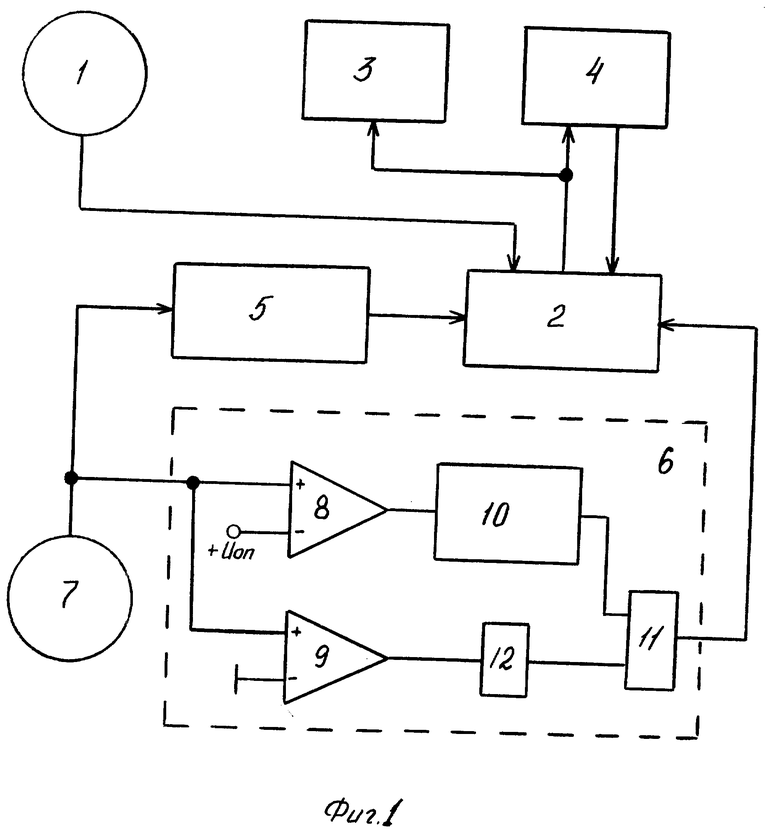
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, заявка, 2147701, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РСТ, заявка, WO 87/07012, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

