Изобретение относится к области приборостроения и может быть использовано в приборах для определения координат и для ориентирования на местности человека, передвигающегося пешим порядком.
Известно навигационное устройство, описанное в патенте Российской федерации N 2058532, G 01 C 21/00, 1996 г. "Навигационное устройство". Устройство содержит датчик угловой ориентации, датчик перемещения, вычислитель текущих координат, устройство управления, блок индикации. Кроме этого, устройство содержит блок ввода начальных данных, вычислитель "азимут-дальность" и коммутатор.
Известное устройство имеет низкую точность измерения навигационных параметров, повышенное энергопотребление и отличается сложностью.
Наиболее близкой по технической сущности к предлагаемому изобретению является система, описанная в заявке РОТ (WO) N 87/07012, G 01 C 21/12, 1987 г. "Система автоматической ориентации для совершающих прогулку или путешествие, а также слепых". Система автоматической ориентации содержит (фиг. 1) блок угловой ориентации 1, датчик перемещения 2, вычислительное устройство 3, пульт управления 4, блок индикации 5 и звукоизлучающий элемент 6. Выходы пульта управления 4 соединены с первыми входами вычислительного устройства 3, вторые входы которого соединены с информационными выходами блока угловой ориентации 1, первые выходы вычислительного устройства 3 соединены с входами блока индикации 5 и пульта управления 4. Кроме этого, система автоматической ориентации содержит дополнительное запоминающее устройство 7, подключенное к третьим входам вычислительного устройства 3, вибрационный датчик 8, соединенный с первыми выходами блока индикации 5, внешний датчик шага 9 с соединительным устройством 10 для подключения к первому входу вычислительного устройства 3, электронные часы 11, выход датчика перемещения 2 подключен к второму входу вычислительного устройства 3, звукоизлучающий элемент 6 соединен с вторыми выходами блока индикации 5.
Известная система автоматической ориентации обеспечивает достаточно высокую точность определения координат человека при возвращении в пункт маршрута движения. При этом весь маршрут фактически разбивается на отдельные отрезки длиной не более нескольких сот метров. Координаты контрольных точек маршрута измеряются и запоминаются в дополнительном ЗУ при движении человека из начального пункта. При возвращении человек движется от одной контрольной точки до другой, причем в каждой точке проводится коррекция ошибок, полученных на предыдущем отрезке.
Однако в большинстве практических случаев протяженность маршрута движения может составить многие километры при отсутствии видимых ориентиров с известными координатами. При невозможности периодической коррекции измеряемых параметров ошибки измерения координат при использовании известной системы могут достигать недопустимой величины. Эти ошибки связаны с изменением длины шага человека и с погрешностями измерения азимутальных углов направления движения, вызываемыми динамическим воздействием при ходьбе на механическую систему чувствительных элементов блока угловой ориентации. При ходьбе человека возникают ускорения и угловые колебания его корпуса в трех плоскостях с периодом двойного шага. Максимальные значения ускорений достигаются в моменты перехода фазы шага из одноопорной в двухопорную, что приводит к отклонению чувствительного элемента (магнитной стрелки, магнита на керновой опоре и т. п.) блока угловой ориентации от направления магнитного меридиана. Кроме этого, следует учитывать, что мгновенное значение направления движения, измеряемое прибором, как правило, на корпусе человека, не совпадает с направлением траектории движения, что приводит к дополнительным ошибкам.
Известная система автоматической ориентации имеет также повышенное энергопотребление, связанное с необходимостью непрерывного обновления информации на выходе блока угловой ориентации, с частотой на порядок и выше, чем темп движения. В противном случае угловые ошибки не позволят использовать известную систему даже в частных случаях.
Все это ограничивает область применения системы автоматической ориентации.
Задача, на решение которой направлено заявляемое изобретение, заключается в расширении области применения навигационного прибора путем обеспечения возможности его использования на протяженных маршрутах произвольной формы в условиях отсутствия ориентиров, а также при проведении ряда геофизических работ.
Технический результат, который может быть получен при осуществлении предлагаемого устройства, заключается в повышении точности измерения при ходьбе угла направления движения, длины шага, координат человека и в снижении энергопотребления.
Для решения поставленной задачи в навигационный прибор, содержащий блок угловой ориентации, датчик перемещения, вычислительное устройство, пульт управления, блок индикации и звукоизлучающий элемент, информационные выходы блока угловой ориентации соединены с первыми входами данных вычислительного устройства, выходы данных которого соединены с входами блока индикации и входами пульта управления, выход которого соединен с входом управления вычислительного устройства, введены формирователь задержанных импульсов и таймер, входы управления и информационные выходы которого соединены, соответственно, с выходами управления и вторыми входами данных вычислительного устройства, первый выход управления которого соединен с первым входом запуска формирователя задержанных импульсов, второй вход запуска которого соединен с выходом датчика перемещения, а первый и второй выходы соединены, соответственно, с входами коррекции и запуска блока угловой ориентации, выход готовности которого соединен с входом прерывания вычислительного устройства, второй выход управления которого соединен с входом звукоизлучающего элемента.
Введение в известное устройство формирователя задержанных импульсов и подключение его второго входа запуска к выходу датчика перемещения, а второго выхода - к входу запуска блока угловой ориентации позволяет синхронизировать работу блока угловой ориентации с фазой шага и обеспечить измерение угла направления движения в моменты времени, когда динамическое воздействие на подвижные части чувствительных элементов блока угловой ориентации минимальны, а измеряемый угол соответствует направлению перемещения человека, что позволяет повысить точность измерения направления перемещения человека. Кроме этого, введение указанных признаков обеспечивает возможность проведения на каждом шаге только одного цикла измерения угла при сохранении точности, что позволяет снизить энергопотребление устройства в целом. Соединение первого выхода формирователя с входом коррекции блока угловой ориентации позволяет повысить точность измерения угла направления движения путем учета дрейфа нуля усилителя блока угловой ориентации.
Введение в известное устройство таймера и соединение его входов управления и информационных входов, соответственно, с выходами управления и вторыми входами данных вычислительного устройства, соединение выходов готовности блока угловой ориентации с входом прерывания вычислительного устройства позволяет определять длительность каждого шага и проводить коррекцию значения длины шага в процессе ходьбы.
Кроме этого, соединение второго выхода управления вычислительного устройства с звукоизлучающим элементом позволяет задавать оператору фиксированный темп движения (метроном), что дополнительно повышает точность определения длины шага.
Соединение первого выхода управления вычислительного устройства 3 с первым входом запуска формирователя 7 обеспечивает проведение измерения углов на стоянке.
В совокупности указанные признаки позволяют повысить точность измерения координат человека.
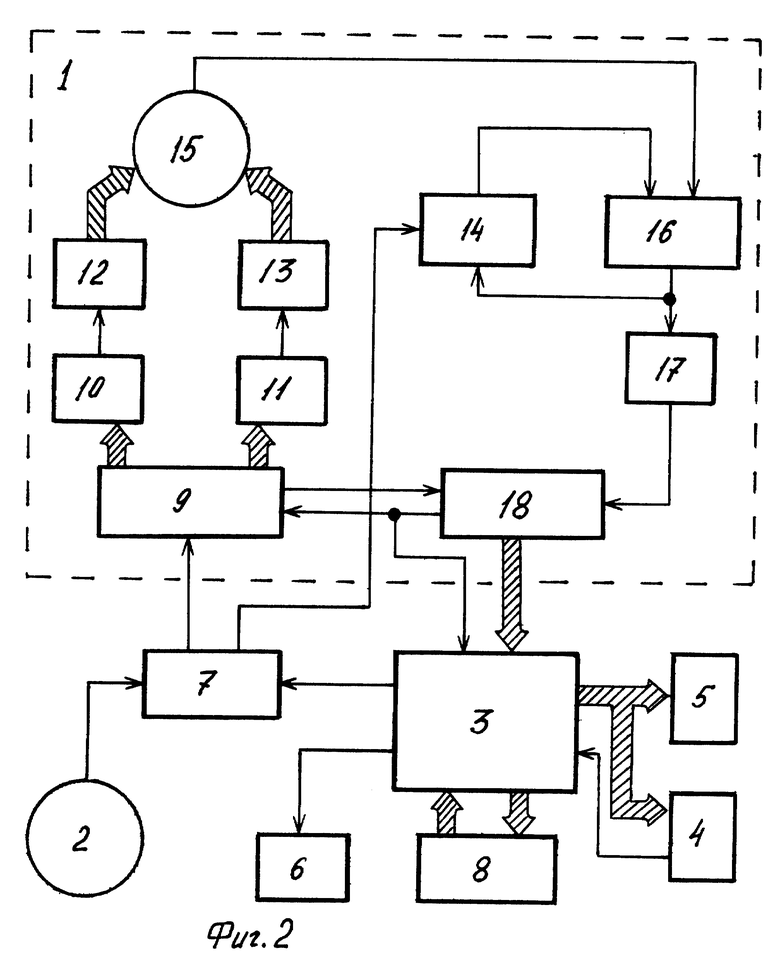
На фиг. 2 представлена структурная схема навигационного прибора.
Навигационный прибор содержит блок угловой ориентации 1, датчик перемещения 2, вычислительное устройство 3, пульт управления 4, блок индикации 5 и звукоизлучающий элемент 6, информационные выходы блока угловой ориентации 1 соединены с первыми входами данных вычислительного устройства 3, выходы данных которого соединены с входами блока индикации 5 и входами пульта управления 4, выход которого соединен с входом управления вычислительного устройства 3.
Кроме этого, навигационный прибор содержит формирователь задержанных импульсов 7 и таймер 8, входы управления и информационные выходы которого соединены, соответственно, с выходами управления и вторыми входами данных вычислительного устройства 3, первый выход управления которого соединен с первым входом запуска формирователя задержанных импульсов 7, второй вход запуска которого соединен с выходом датчика перемещения 2, а первый и второй выходы соединены, соответственно, с входами коррекции и запуска блока угловой ориентации 1, выход готовности которого соединен с входом прерывания вычислительного устройства 3, второй выход управления которого соединен с входом звукоизлучающего элемента 6.
Блок угловой ориентации 1 содержит функциональный преобразователь 9, первый и второй цифроаналоговые преобразователи (ЦАП) 10, 11, первый и второй усилители мощности 12, 13, схему коррекции 14, последовательно соединенные датчик угловой ориентации 15, усилитель 16, компаратор 17 и фазометр 18, вход запуска и выход окончания преобразования которого соединены, соответственно, с выходом и первым входом функционального преобразователя 9, первые и вторые информационные выходы которого, соответственно, через первый и второй ЦАП 10, 11 подключены к первому и второму усилителям мощности 12, 13, выходы которых соединены, соответственно, с первыми и вторыми входами датчика угловой ориентации 15, вход и выход схемы коррекции 14 соединены, соответственно, с выходом и вторым входом усилителя 16, второй вход функционального преобразователя 9 является входом запуска блока угловой ориентации 1, информационные выходы и вход окончания преобразования фазометра 18 являются, соответственно, информационными выходами и выходом готовности блока угловой ориентации 1, а вход управления системы коррекции 14 является входом коррекции блока угловой ориентации 1.
Работа прибора в общем случае основана на измерении на каждом шаге человека азимутального угла направления движения и длины шага для определения по заданным алгоритмам прямоугольных координат человека, а также ориентирования на местности - определение углов направления движения, углов и дальностей до контрольных пунктов и т.п.
Навигационный прибор с помощью индивидуального снаряжения закрепляется на груди оператора (человека).
В начальной точке маршрута оператор с пульта управления 4 вводит в вычислительное устройство 3 исходные данные - координаты начальной точки, значение поправки направления (магнитного склонения), коэффициент шага, координаты пункта назначения (контрольных пунктов) и т. п., контролируя вводимые значения с помощью блока индикации 5.
Во время движения по маршруту датчик перемещения 2 на каждом шаге вырабатывает сигнал, поступающий на второй вход запуска формирователя задержанных импульсов 7, который через ≈0,4 сек выдает импульс на вход запуска блока угловой ориентации 1. По окончании преобразования с выхода блока угловой ориентации 1 поступает на вход прерывания вычислительного устройства 3 сигнал готовности, а с информационных выходов блока 1 на первые входы данных вычислительного устройства 3 - код азимутального угла. Вычислительное устройство 3 считывает код угла и с помощью таймера 8 определяет время шага Tш, численно равное длительности между сигналами готовности. По измеренному значению Tш проводится расчет длины шага.
Расчет прямоугольных координат проводится вычислительным устройством 3 в соответствии с уравнениями:
где X, Y - координаты оператора;
X0, Y0 - координаты начальной точки маршрута движения, вводятся с пульта управления;
Li - измеренное значение длины шага оператора;
Aмi - значение азимутального угла направления движения, измеряемое на каждом шаге;
ΔAм - значение поправки направления, равное алгебраической разности магнитного склонения и сближения меридианов, вводится с пульта 4.
По измеренным значениям координат оператора и известным координатам пункта назначения (контрольных пунктов) в любой точке маршрута может быть проведен с помощью вычислительного устройства расчет дальности и дирекционного угла до пункта назначения. Кроме этого, навигационный прибор может быть использован для ориентирования по направлению, измерения пройденного пути, определения средней скорости движения, сигнализации оператору об отклонении от заданного направления движения и т.п.
Одной из основных причин, снижающих точность работы навигационного прибора, являются ошибки измерения азимутальных углов, связанные с динамикой ходьбы человека. Известно, что цикл ходьбы включает два одинаковых шага (один двойной шаг), для которых можно выделить фазу одноопорного и двухопорного движения. Максимальные ускорения и, соответственно, силы, действующие на подвижные механические элементы датчика угловой ориентации 15, возникают в момент перехода из одноопорной фазы шага в двухопорную, т. е. в моменты соприкосновения левой (правой) ноги с грунтом. После момента касания и последующего перехода в фазу одноопорного движения в течение ≈0,4 сек воздействие постепенно уменьшается и подвижный элемент датчика угловой ориентации 15 (магнитная стрелка, магнит на керновой опоре) находится в относительном покое. Кроме этого, следует учитывать, что в процессе ходьбы корпус человека циклически отклоняется от траектории движения на угол ±10o. В нормальном темпе движения через 0,4 сек после касания ногой грунта рассогласование по углу измерительной оси прибора, расположенного на корпусе, и траектории движения минимальны. Именно указанный момент является близким к оптимальному для измерения угла направления движения. Поскольку определить абсолютно точно момент совпадения измерительной оси прибора с направлением движения невозможно, необходимо обеспечить синхронизацию измерения углов относительно моментов касания грунта левой и правой ногами. В этом случае ошибки измерения углов минимальны за счет усреднения за четное количество шагов.
Датчик перемещения 2 вырабатывает в момент касания ногой грунта импульс, который запускает формирователь 7. Через заданное время (≈0,4 сек) с второго выхода формирователя 7 поступает импульс запуска блока угловой ориентации 1, что обеспечивает проведение измерения угла в оптимальные моменты.
При необходимости измерения и индикации угла на остановках, когда от датчика перемещения 2 не поступают сигналы, сигналы запуска формирователя 7 поступают на его первый вход от вычислительного устройства 3.
Блок угловой ориентации 1 работает следующим образом. С приходом импульса запуска с формирователя 7 функциональный преобразователь 9 вырабатывает сигнал запуска фазометра 18 и формирует на своих выходах коды синуса и косинуса, которые в ЦАП 10, 11 преобразуются в аналоговую форму, усиливаются усилителями мощности 12, 13 и поступают на входы датчика угловой ориентации 15. Выходной сигнал датчика 15 синусоидальной формы, фаза которого пропорциональна измеряемому углу, через усилитель 16 поступает на компаратор 17. В момент перехода сигнала через нуль компаратор вырабатывает сигнал останова фазометра 18, на информационных выходах которого фиксируется код угла, а сигнал окончания преобразования останавливает функциональный преобразователь 9 и поступает на вход прерывания вычислительного устройства 3. Перед каждым запуском блока 1 формирователь 7 на своем первом выходе формирует короткий импульс, поступающий на схему коррекции 14, которое обеспечивает проведение коррекции дрейфа нуля усилителя 16, что повышает точность работы блока 1. Схема коррекции представляет собой устройство выборки-хранения (УВХ), которое с приходом на его вход управления импульса запоминает выходной сигнал усилителя 16 при нулевом входном сигнале и обеспечивает подачу его в цепь обратной связи усилителя 16 для компенсации дрейфа нуля.
В качестве датчика угловой ориентации 15 может быть использован круглый магнит на керновой опоре с ортогонально расположенными вокруг него в горизонтальной плоскости датчиками Холла. Датчики Холла попарно запитываются синусокосинусными сигналами, а их выходные сигналы суммируются. Суммарный сигнал синусоидальной формы имеет фазу, которая определяется положением датчиков Холла относительно полюсов магнита, а т.к. магнит ориентируется вдоль магнитного меридиана, то это позволяет измерить азимутальный угол. Для уменьшения динамического воздействия при ходьбе на подвижный магнит используют жидкостное демпфирование.
Таким образом, формирователь задержанного импульса 7 и датчик пути 2 обеспечивают в оптимальные моменты времени проведение коррекции дрейфа нуля усилителей блока 1 и запуск цикла измерения угла с жесткой синхронизацией относительно моментов касания грунта левой и правой ногой. Это позволяет повысить точность измерения углов направления движения. Кроме этого, предлагаемое техническое решение позволяет уменьшить энергопотребление устройства, существенный вклад в которое вносят токи накачки чувствительных элементов датчика 15. Снижение достигается тем, что на каждом шаге проводится только одно измерение угла (при сохранении точности измерения). Останов функционального преобразователя 9 по сигналу окончания преобразования фазометра 18 дополнительно снижает энергопотребление, особенно при малых измеряемых углах.
На точность работы навигационного прибора существенное влияние оказывает измерение длины шага, связанное с колебаниями темпа движения, изменениями типа грунта на маршруте, усталостью человека.
Экспериментально установлено, что для среднего темпа движения (90...120 шаг/мин) справедливо соотношение
Lш " K1 - K2•Tш,
где Lш - длина шага;
K1, K2 - коэффициенты, постоянные для каждого человека, определяются по результатам прохождения мерного участка в замедленном и убыстренном темпах движения;
Tш - время шага.
Указанная зависимость длины шага от его времени может быть использована в предлагаемом техническом решении.
Измерение длительности шага проводится следующим образом. После появления сигнала готовности на выходе блока угловой ориентации 1 вычислительное устройство считывает выходной код таймера 8, обнуляет его и вновь запускает. Это позволяет измерить длительность между сигналами готовности блока угловой ориентации 1, поступающими на вход вычислительного устройства 3. Указанная длительность практически совпадает с длительностью шага и может отличаться на время преобразования блока 1, которое, как правило, меньше требуемой погрешности измерения. По измеренному времени шага вычислительное устройство 3 проводит расчет длины шага, значение которого используется при определении координат. Точность определения длины шага может быть повышена при использовании звукоизлучающего элемента в качестве метронома. При этом с помощью вычислительного устройства 3 элементом 6 формируются короткие звуковые сигналы, которые позволяют оператору поддерживать стабильный темп движения и тем самым повысить стабильность длины шага. Темп движения подбирается оператором индивидуально и задается с пульта управления 4.
Звукоизлучающий элемент 6 может быть использован также для сигнализации оператору об отклонении от заданного направления, о подходе к пункту назначения и т. п.
Технический эффект от использования предлагаемого устройства заключается в повышении точности измерения углов направления движения, пройденного пути (длины шага) и координат человека, передвигающегося пешим порядком. Кроме этого, устройство отличается более низким энергопотреблением. Все это позволяет расширить область применения устройства путем обеспечения возможности его использования на протяженных маршрутах произвольной формы в условиях отсутствия ориентиров, ограниченной видимости, а также при проведении ряда геофизических работ.
Наиболее успешно предлагаемое устройство может быть использовано геологами, поисково-спасательными службами, экспедициями, работающими в экстремальных условиях (дождь, туман, задымленность, отсутствие ориентиров и т. д. ), спортсменами, туристами, лицами с ограниченной степенью зрения и слепыми.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| НАВИГАЦИОННЫЙ ПРИБОР | 1995 |
|
RU2112214C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СТАРТСТОПНЫХ СООБЩЕНИЙ | 1999 |
|
RU2157053C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ ДЛЯ ПРИЕМНИКОВ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2000 |
|
RU2204201C2 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| СИСТЕМА ЛАЗЕРНОЙ СВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2000 |
|
RU2197066C2 |
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ СТРУКТУРНЫХ ПОМЕХ ДЛЯ ПРИЕМНИКОВ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2001 |
|
RU2205503C2 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 2000 |
|
RU2187888C1 |
Изобретение относится к области приборостроения и может быть использовано в приборах для определения координат и для ориентирования на местности человека, передвигающегося пешим порядком. Работа прибора основана на измерении на каждом шаге человека азимутального угла направления движения и длины шага с выработкой информации для определения координат и ориентирования на местности. Прибор содержит блок угловой ориентации, датчик перемещения, вычислительное устройство, пульт управления, блок индикации, звукоизлучающий элемент, формирователь задержанных импульсов и таймер. Первый выход управления вычислительного устройства и выход датчика перемещения соединены соответственно с первым и вторым входами запуска формирователя, первый и второй выходы которого соединены соответственно с входом коррекции и входом запуска блока угловой ориентации, выход готовности и информационные выходы которого соединены с входом прерывания и первыми входами данных вычислительного устройства. Входы и выходы таймера соединены соответственно с выходами управления и вторыми входами данных вычислительного устройства, второй выход управления которого соединен с входом звукоизлучающего элемента, а выходы данных соединены с входами блока индикации и пульта управления, выход которого соединен с входом управления вычислительного устройства. Технический эффект от использования навигационного прибора заключается в повышении точности измерения углов направления движения, пройденного пути и координат человека, а также в снижении энергопотребления. 1 з.п.ф-лы, 2 ил.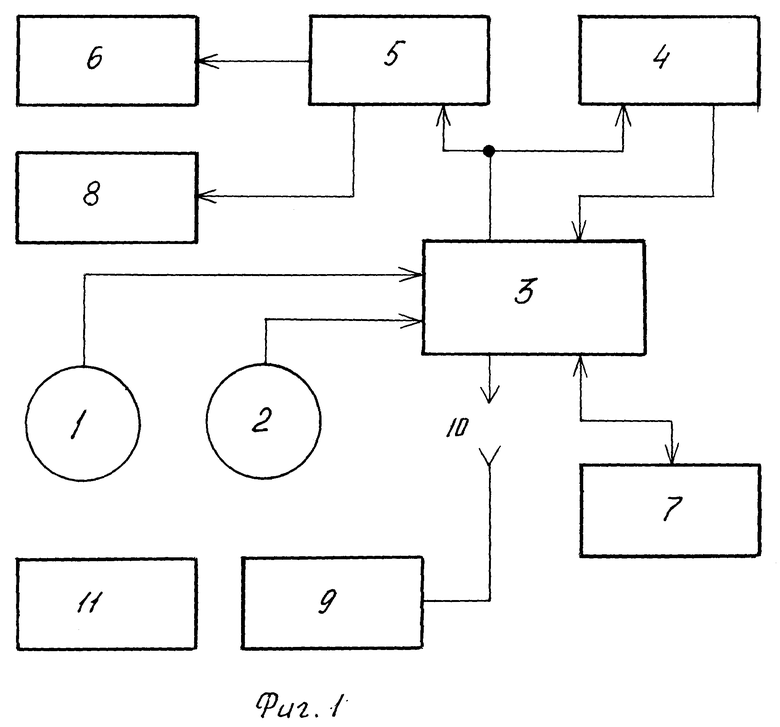
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| RU 2058532 C1, 20.04.1996 | |||
| НАВИГАЦИОННЫЙ ПРИБОР | 1995 |
|
RU2112214C1 |
| US 4132113 A1, 02.06.1979. | |||
