Изобретение относится к судостроению, в частности, к системам автоматического контроля и диагностирования технического состояния пропульсивного комплекса судна, включающего в себя двигатель, редуктор, муфту, линию вала, гребной винт.
Известно устройство контроля работоспособности пропульсивного комплекса судна по пат. ПНР N 143347, кл. G 01 M 15/00, опубл. в 1987 г., содержащее датчик перемещения топливной рейки, датчик частоты вращения, преобразователь "перемещение-напряжение", преобразователь "частота вращения-напряжение", индикатор (осцилограф).
Принцип работы данного устройства заключается в том, что на экране осцилографа нанесена область G допустимой работы дизеля в координатах n, l, где n - частота вращения, l - перемещение топливной рейки, относительно которой отображается положение рабочей точки (текущих значений n, l). Положение рабочей точки относительно границы области G характеризует степень работоспособности (эффективность работы) пропульсивного комплекса.
Недостатком данного устройства являются:
- ограниченная достоверность контроля, обусловленная, тем что работоспособность пропульсивного комплекса зависит не только от параметров n, l, но и от множества других факторов, например, от глубины фарватера H;
- ограниченное быстродействие из-за необходимости участия в работе человека-оператора (судомеханика или судоводителя).
Известно устройство контроля пропульсивного комплекса судна, содержащее блоки защиты двигателя с подключенными к ним датчиками давления и температуры смазки двигателей, редукторов и валопроводов каждого борта, датчика положения разобщительных муфт промежуточного редуктора с выходными контактами, причем выходы каждого блока защит подключены к своему стоп-крану (см., например, Гительман А.И. Динамика и управление судовых ГТУ. - Л.: Судостроение, 1974, с. 270).
Недостатками данного устройства являются ограниченные функциональные возможности из-за того, что оно не позволяет определять степень работоспособности.
Наиболее близким по технической сущности к предложенному является устройство контроля работоспособности пропульсивного комплекса судна по авт.св. СССР N 901165, кл. B 63 H 21/22, G 06 F 15/46, опубл. в БИ N 4, 1982 г., содержащее аналоговые и цифровые датчики технических параметров с преобразователями, соединенные с устройствами цифрового измерения и контроля, блоками индивидуальной сигнализации на мнемосхеме и устройством обобщенной аварийно-предупредительной сигнализации, включающей в себя блок логической обработки измеряемых параметров и блок обобщенной сигнализации, с блоком ручного и автоматического управления вспомогательными механизмами, устройство управления главными двигателями, вход которого соединен с датчиками технических параметров судна, устройство представления информации, блок программного запуска вспомогательных механизмов и переключателем питания с основного на резервное, выходы которого соответственно соединены с мнемосхемой и блоком логической обработки измеряемых параметров устройства обобщенной аварийно-предупредительной сигнализации.
Известное устройство позволяет измерять значения контролируемых параметров, частоты оборотов главного двигателя, перегрузки двигателя, температуры окружающей среды и т.д., определять величину отклонения параметров от заданных значений и вырабатывать управляющие сигналы.
Недостатком данного устройства является ограниченная достоверность контроля, обусловленная тем, что область работоспособности пропульсивного комплекса аппроксимирована гиперпрямоугольником. При этом появляются "ложные отказы" и "необнаруженные отказы". Кроме того, отсутствует контроль такого параметра, как глубина фарватера "H", знание которого позволяет более обоснованно оценить работоспособность пропульсивного комплекса судна.
В предложенном изобретении достигается цель повышения достоверности контроля работоспособности пропульсивного комплекса судна.
Указанная цель достигается тем, что в устройство контроля работоспособности пропульсивного комплекса судна, содержащее датчик скорости судна, датчик часового расхода топлива, датчик мощности, датчик частоты вращения, блок индивидуальной сигнализации, блок логической обработки, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами блока отображения информации, дополнительно введены датчик глубины фарватера, блок диагностирования движителя и блок диагностирования двигателя, при этом выход датчика частоты вращения соединен с объединенными первыми входами блока диагностирования движителя блока диагностирования двигателя, вторые объединенные входы которых соединены с выходом датчика часового расхода топлива, выход датчика скорости подключен к третьему входу блока диагностирования движителя, первый выход которого соединен с первым входом блока логической обработки, второй выход - с первым входом блока индивидуальной сигнализации, выход датчика мощности соединен с третьим входом блока диагностирования двигателя, первый выход которого соединен со вторым входом блока логической обработки, второй выход - со вторым входом блока индивидуальной сигнализации, выход датчика часового расхода топлива подключен к третьему входу блока логической обработки, четвертый вход которого соединен с выходом датчика глубины фарватера.
Сущность изобретения заключается в следующем.
Для каждого типа судна при определенных значениях скорости хода судна V, часового расхода топлива gф, частоты вращения n, мощности Mе и глубины фарватера H существует область работоспособности P, при прохождении внутри которой отображающей точки (комбинации определенных значений U, gф, n, Me, H) пропульсивный комплекс судна, т.е. система-двигатель, редуктор (муфта), линия вала и гребной винт - является работоспособной.
Для повышения достоверности контроля, т.е. для определения в реальных условиях плавания конкретной причины повышения расхода топлива (если такое имеет место) - двигатель или гребной винт, а также для определения степени работоспособности пропульсивного комплекса (например, в %) область P разбивается на две области: область G и область Q.
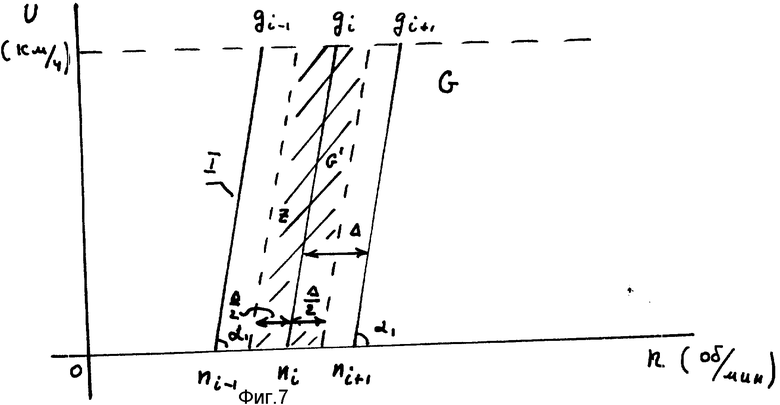
Область G в координатах U, n (см. фиг. 7) разбита на подобласти G' прямыми, уравнения которых имеют вид
U = k•n + bi, (i = 1, 2, ...)
где
k - угловой коэффициент прямой I. Прямые расположены параллельно друг другу на расстоянии Δ . Величина Δ представляет собой погрешность измерения часового расхода топлива и зависит от вида выходного сигнала датчика расхода топлива (дискретный или непрерывный), зоны его нечувствительности и т.п. Каждый прямой U = k•n + bi соответствует определенный часовой расход топлива gxpi. Таким образом, каждому значению bi соответствует величина gmpi, т.е.
bi= μgmpi, (2)
где
μ - коэффициент пропорциональности.
Из (1) и (2) следует, что (в общем случае)
Область G в координатах V, n (см. фиг. 7) разбита на подобласти G'. Подобласть G' ограничена прямыми
На фиг. 7 подобласть g' заштрихована. Т.о., в зависимости от технического состояния пропульсивного комплекса судна возможны следующие варианты расположения отображающей точки  относительно подобласти G':
относительно подобласти G':
где
gтр - номинальное (требуемое) значение часового расхода топлива, соответствующее текущим значениям n, V.
Случай "в" соответствует работоспособному состоянию движителя (гребного винта и линия вала).
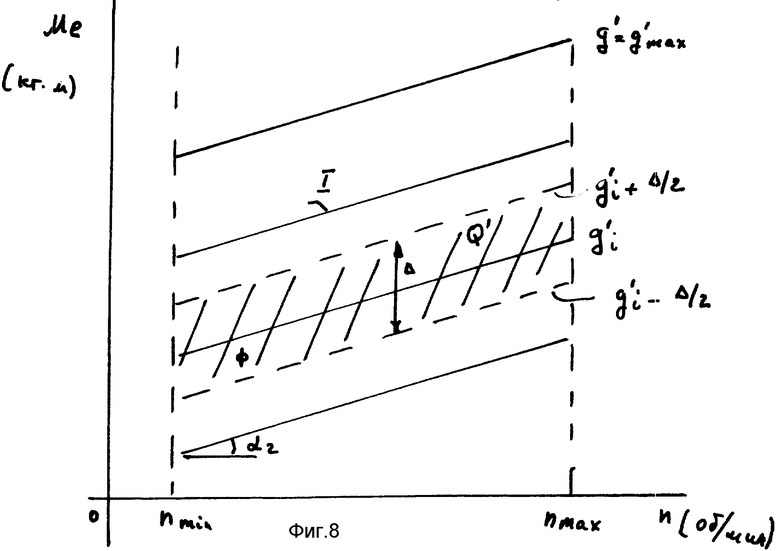
Область Q на плоскости параметров (Me, n) разбита на подобласти Q' прямыми, уравнения которых имеют вид:
Mei = m•n + di
где
m - угловой коэффициент (см. фиг. 8) ( (m = tgα2). ).
Прямые (4) расположены параллельно друг другу в области G параллельно друг другу на расстоянии Δ друг от друга. Каждой прямой Mei = mn + di соответствует определенный (требуемый) часовой расход топлива  . Т.о., каждому значению di соответствует величина
. Т.о., каждому значению di соответствует величина  , т.е.
, т.е.
где
ψ - коэффициент пропорциональности.
Из (4) и (5) соответствует, что
или в общем случае
Область Q разбита на подобласти Q', ограниченной прямыми, уравнения которых
На фиг. 8 данная подобласть заштрихована.
В зависимости от технического состояния пропульсивного комплекса судна возможны следующие варианты расположения отображающей точки η = (Me,n) относительно подобласти Q' :
Случай "b" соответствует работоспособному состоянию двигателя.
Оценка положений отображающих точек относительно подобластей G' и Q' позволяет определить работоспособность пропульсивного комплекса, источник чрезмерного расхода топлива (если такое имеет место) и оценить величину перерасхода топлива, например, в %.
Отличительными признаками предложенного устройства являются:
- введение датчика глубины фарватера;
- введение блока диагностирования движителя:
- введение блока диагностирования двигателя;
- введение связей между известными и вновь введенными блоками.
Признак-введение датчика глубины фарватера - известен (см. например, Бегунков А.И., Иванов В.И. Автоматизация речных судов. Справочное пособие. - М.: Транспорт, 1970) и используется по прямому назначению.
Признак-блок контроля известен (см. , например, Калявин В.П., Мозгалевский А.В. Технические средства диагностирования. -Л.: Судостроение, 1984, 208 с.). Однако в известных блоках контроля контролируется нахождение параметра, например, "X" в определенных пределах Xmin, Xmax, где Xmin, Xmax - соответственно минимальное и максимальное значения параметра X:
Xmin≤X≤Xmax.
При этом в случае контроля M параметров область допустимых значений параметров  - область P - имеет вид M-мерного гиперпараллелепипеда. В реальности область P может иметь произвольную форму. Аппроксимация реальной области P M-мерным прямоугольным гиперпараллелепипедом обуславливает появление погрешностей типа "ложный отказ" и "необнаруженный отказ" (соответственно Pло и Pпо). Аппроксимация области P гиперповерхности и, в частности, гиперплоскостями, уменьшает вероятности Pло и Pпо. На плоскости двух параметров аппроксимация области P позволяет представить область P в виде многоугольника. В предложенном техническом решении области G, Q аппроксимированы в виде параллелограмма.
- область P - имеет вид M-мерного гиперпараллелепипеда. В реальности область P может иметь произвольную форму. Аппроксимация реальной области P M-мерным прямоугольным гиперпараллелепипедом обуславливает появление погрешностей типа "ложный отказ" и "необнаруженный отказ" (соответственно Pло и Pпо). Аппроксимация области P гиперповерхности и, в частности, гиперплоскостями, уменьшает вероятности Pло и Pпо. На плоскости двух параметров аппроксимация области P позволяет представить область P в виде многоугольника. В предложенном техническом решении области G, Q аппроксимированы в виде параллелограмма.
Таким образом, предложенное техническое решение блоков диагностирования движителя и двигателя позволяет повысить достоверность контроля за счет уменьшения вероятностей принятия неправильного решения из-за уменьшения вероятностей появления "ложного отказа" или "необнаруженного отказа".
Авторы не обнаружили технических решений устройств контроля работоспособности пропульсивного комплекса, в которых использовались бы такие признаки, как выполнение блоков диагностирования движителя и двигателя и связи между известными и вновь введенными блоками. По мнению авторов, указанные признаки являются "существенными признаками", использование которых позволяет:
- повысить достоверность контроля;
- увеличить глубину контроля;
- расширить сферу применения за счет использования данного устройства на судах различного типа и за счет использования для технической реализации стандартных деталей;
- повысить быстродействие принятия управленческого решения за счет работы устройства в реальном масштабе времени.
На фиг. 1 изображена блок-схема предложенного устройства контроля работоспособности пропульсивного комплекса судна; на фиг. 2 - схема блока диагностирования двигателя; на фиг. 4 - схема блока индивидуальной сигнализации; на фиг. 5 - схема блока отображения информации; на фиг. 6 - схема блока логической обработки; на фиг. 7 - 8 - пояснения принцепа работы устройства.
Устройство контроля пропульсивного комплекса судна (фиг. 1) содержит датчик скорости хода судна 1, датчик часового расхода топлива 2, датчик частоты вращения 3, датчик мощности 4, датчик фарватера 5, блок диагностирования движителя 6, блок диагностирования двигателя 7, блок индивидуальной сигнализации 8, блок логической обработки 9, блок отображения информации 10, при этом выход датчика частоты вращения 3 соединен с объединенными первыми входами блока диагностирования движителя 6 и блока диагностирования двигателя 7, вторые объединенные входы которых соединены с выходом датчика часового расхода топлива 2, третий вход блока диагностирования движителя 6 соединен с выходом датчика скорости хода судна 1, а первый выход - с первым входом блока логической обработки 9, второй выход - с первым входом блока индивидуальной сигнализации 8, второй вход которого соединен со вторым выходом блока диагностирования двигателя 7, третий вход которого соединен с выходом датчика мощности 4, а первый выход - со вторым входом блока логической обработки 9, третий вход которого соединен с выходом датчика глубины фарватера 5, четвертый - с выходом датчика часового расхода топлива 2, а первый, второй и третий выходы - соответственно с первым, вторым и третьим входами блока отображения информации 10.
В качестве датчика скорости судна 1 может использоваться лаг.
Датчик частоты вращения 3 и датчик мощности 4 могут быть размещены между судовым двигателем (дизелем) и муфтой. При этом муфта функционально относится к движителю. Тогда датчик частоты вращения 3 измеряет частоту вращения двигателя, т.е. датчик 3 является датчиком числа оборотов двигателя.
Если датчик 3 и датчик мощности 4 размещены на гребном валу, то муфта функционально относится к двигателю. В этом случае датчик 3 является датчиком числа оборотов вала.
Датчик часового расхода топлива 2 выдает сигнал, пропорциональный расходу топлива в час с учетом отсечного топлива. Функционально он может состоять из двух датчиков расхода топлива: первого, расположенного в трубопроводе топлива перед топливным насосом высокого давления, и второго, расположенного в трубопроводе отсечного топлива. Выходной сигнал датчика 2 - gф = p1 - p2, где p1, p2 - выходные сигналы первого и второго датчиков расхода.
Датчик глубины фарватера 5 может быть выполнен с релейной характеристикой. Его выходной сигнал при этом равен логической единице при глубине фарватера H меньше Hmin (например, Hmin = 4 м) и сигнал логического нуля при H≥Hmin.
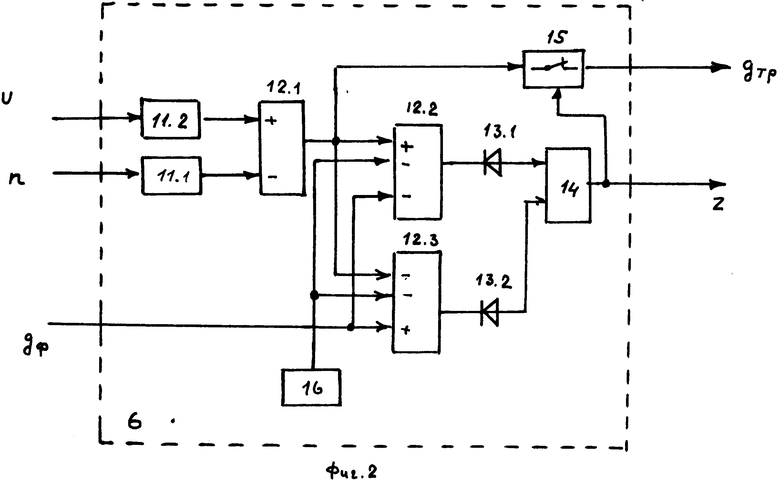
Блок диагностирования движителя 6 (фиг. 2) содержит два масштабных усилителя 11, три сумматора 12, два вентиля 13, элемент И 14, ключевой элемент 15, источник опорного напряжения 16, при этом к первому (вычитающему) входу сумматора 12.1 подключен выход масштабного усилителя 11.1, ко второму (суммирующему) входу - выход масштабного усилителя 11.2, а выход - с информационным входом ключевого элемента 15, с первым (суммирующим) входом сумматора 12.2 и с первым (вычитающим) входом сумматора 12.3. Вторые вычитающие входы сумматоров 12.2, 12.3 объединены и соединены с выходом источника опорного напряжения 16. Выход сумматора 12.2 соединен с катодом вентиля 13.1. Выход сумматора 12.3 соединен с катодом вентиля 13.2. Аноды вентилей 13.1, 13.2 соединены соответственно с первым и вторым входами элемента И 14, выход которого соединен с управляющим входом ключевого элемента 15. Первым входом блока диагностирования движителя 6 является вход масштабного усилителя 11.1, вторым входом - объединенные третий (вычитающий) вход сумматора 12.2 и третий (суммирующий) вход сумматора 12.3, третьим входом - вход масштабного усилителя 11.2, первым выходом-выход ключевого элемента 15, вторым выходом-выход элемента И 14.
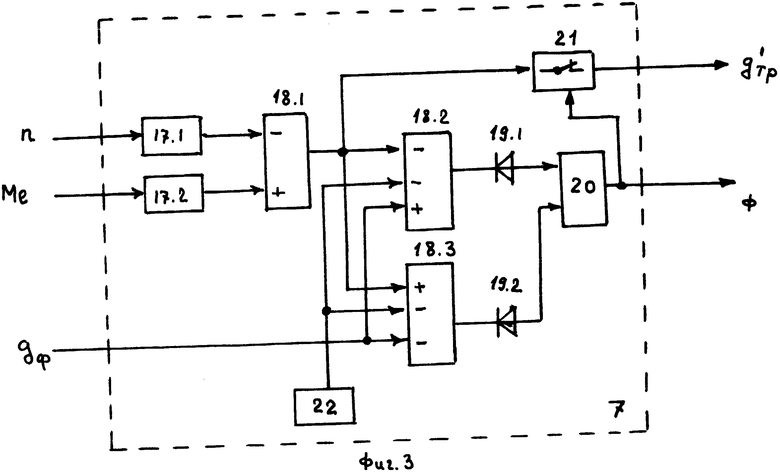
Блок диагностирования двигателя 7 (фиг. 3) содержит два масштабных усилителя 17, три сумматора 18, два вентиля 19, элемент И 20, ключевой элемент 21, источник опорного напряжения 22, при этом выход масштабного усилителя 17.1 соединен с первым (вычитающим) входом сумматора 18.1, второй (суммирующий) вход которого подключен к выходу масштабного усилителя 17.2, а выход - с объединенными информационным входом ключевого элемента 21, с первым (вычитающим) входом сумматора 18.2, с первым (суммирующим) входом сумматора 18.3, выход которого соединен с катодом вентиля 19.2, выход сумматора 18.2 соединен с катодом вентиля 19.1, аноды вентилей 19.1, 19.2 соединены соответственно с первым и вторым входами элемента И 20, выход которого связан с управляющим входом ключевого элемента 21. Первым входом блока диагностирования двигателя 7 является вход масштабного усилителя 17.1, вторым входом - объединенные третий (суммирующий) вход сумматора 18.2 и третий (вычитающий) вход сумматора 18.3, третьим входом-вход масштабного усилителя 17.2, первым выходом - выход ключевого элемента 21, вторым выходом-выход элемента И 20.
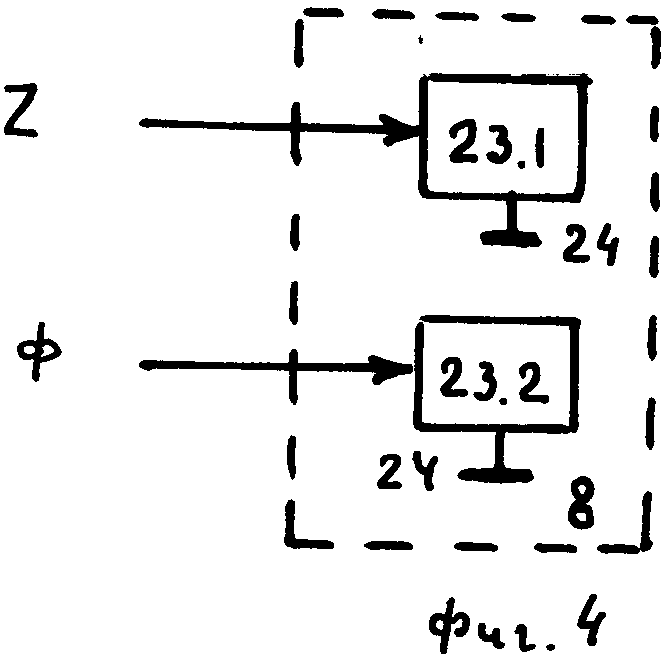
Блок индивидуальной сигнализации (фиг. 4) содержит два индикаторных элемента 23 (например, светодиода). Цифрой 24 обозначена шина "Земля". При этом первым входом блока 8 является вход индикаторного элемента 23.1, вторым входом - вход индикаторного элемента 23.2.
Блок отображения информации 10 (фиг. 5) содержит два индикаторных элемента 25 (например, светодиоды) и узел индикации 26 (например, вольтметр). Цифрой 27 обозначена шина "Земля". Первым входом блока 10 является вход индикаторного элемента 25.1, вторым входом - вход индикаторного элемента 25.2, третьим входом - вход узла индикации 26.
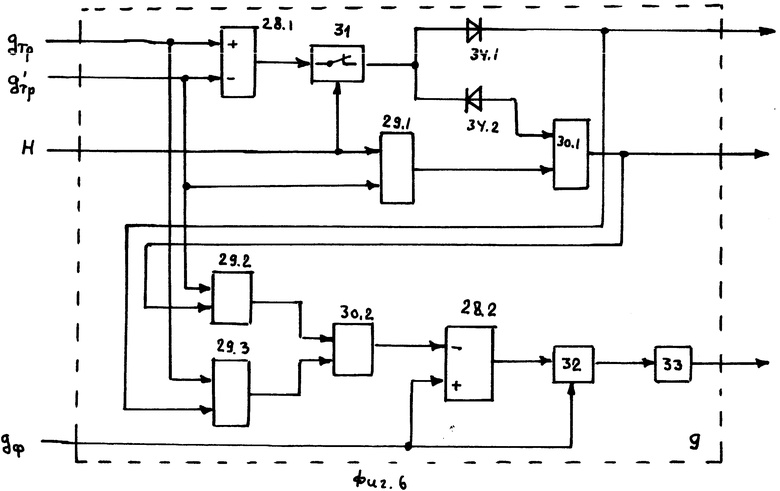
Блок логической обработки 9 (фиг. 6) содержит два сумматора 28, три элемента И 29, два элемента ИЛИ 30, ключевой элемент 31, узел деления (элемент деления) 32, усилитель 33, два вентиля 34, при этом выход сумматора 28.1 соединен с информационным входом ключевого элемента 31, выход которого соединен анодом вентиля 34.1 и с катодом вентиля 34.2, анод которого соединен с первым входом элемента ИЛИ 30.1, второй вход которого соединен с выходом элемента И 29.1, а выход - с первым входом элемента И 29.2, катод вентиля 34.1 соединен с первым входом элемента И 29.3, выходы элементов И 29.2, 29.3 соединены соответственно с первым и вторым входами элемента ИЛИ 30.2, выход которого соединен с первым (вычитающим) входом сумматора 28.2, выход которого подключен к первому входу узла деления 32, выход которого связан со входом усилителя 33, первым входом блока 9 является объединенные первый (суммирующий) вход сумматора 28.1 и второй вход элемента И 29.3, вторым входом - объединенные первый вход элемента И 29.1, второй (вычитающий) вход сумматора 28.1 и второй вход элемента И 29.2, третьим входом - второй (суммирующий) вход сумматора 28.2 и второй вход узла деления 32, четвертым входом - объединенные второй вход элемента И 29.1 и второй (управляющий) вход ключевого элемента 31, первым выходом - катод вентиля 34.1, вторым выходом - выход элемента ИЛИ 30.1, третьим выходом - выход усилителя 33.
В качестве элементов И 29 могут использоваться ключевые элементы.
Технические решения ключевых элементов известны. См., например,:
1. Сидоров А.С. Диодные и транзисторные ключи. - М.: Связь, 1975.
2. Коммутаторы аналоговых сигналов на полупроводниковых элементах. - М.: Энергия, 1976.
3. Арховский В.Ф. Схемы переключения аналоговых сигналов. - М.: Связь, 1976.
Ключевые элементы могут быть реализованы на контактных элементах. Тогда управляющий вход ключевого элемента есть один отвод обмотки реле, второй отвод которой заземлен. Информационный вход-замыкающий контакт реле, неподвижный контакт реле подключен к выходу ключевого элемента.
Технические решения сумматоров, узлов деления, элементов И, ИЛИ приведены в книге У. Титце, К. Шенк. Полупроводниковая схемотехника. М.: Мир, 1982).
В качестве источников опорного напряжения могут использоваться источники регулируемого напряжения постоянного тока. См., например:
1. Полупроводниковые выпрямители. Под ред. Ф.И.Ковалева, Г.П. Мостковой. - М.: Энергия, 1978.
2. Богословский С.А. Силовые полупроводниковые выпрямители. - М.: Воениздат, 1965.
3. Алексенко А.Г. Применение прецизионных ИС. - М.: Сов. радио, 1980.
В качестве источников опорного напряжения могут быть использованы усилители постоянного тока с регулируемым коэффициентом усиления.
Схемные решения элементов (узлов) деления известны. См., например:
1. Справочник по нелинейным схемам. - М.: мир, 1977.
2. Гребен А.Б. Проектирование аналоговых интегральных схем. - М.: Энергия, 1976.
3. Алексенко А. Г. и др. Применение прецизионных аналоговых ИС. - М.: Сов. радио, 1980.
4. Тимонтеев В.И. и др. Аналоговые перемножители сигналов в радиоэлектронной аппаратуре. - М.: Радио и связь, 1982.
Обзор способов деления приведен в книге В.С. Попона, И.И. Желбакова. Измерение среднеквадратического значения напряжения. - М.: Энергоатомиздат, 1987, с. 28 - 35.
Устройство контроля работоспособности пропульсивного комплекса судна (фиг. 1) работает следующим образом.
Выходной сигнал U датчика скорости судна 1 подается на третий вход блока диагностирования движителя 6, выходной сигнал gф датчика часового расхода топлива 2 подается на вторые входы блока диагностирования движителя 6 и блока диагностирования двигателя 7, выходной сигнал n датчика частоты вращения 3 подается на первые входы блока диагностирования двигателя 6 и блока диагностирования движителя 7, выходной сигнал Me датчика мощности 4 подается на третий вход блока диагностирования двигателя 7.
Блок диагностирования движителя 6 (фиг. 2) работает следующим образом. Коэффициент усиления (передачи) масштабного усилителя 11.2 устанавливают равным 1/μ , усилителя 11.1 - равным k/μ . Выходной сигнал U16 источника опорного напряжения 16 устанавливают пропорциональным Δ/2 . В блоке 6 сигнал n с выхода датчика частоты вращения 3 подается на вход масштабного усилителя 11.1, сигнал gф с выхода датчика часового расхода топлива 2 подается на третий (вычитающий) вход сумматора 12.2 и на третий (суммирующий) вход сумматора 12.3. Сигнал U с выхода датчика скорости хода 1 подается на вход масштабного усилителя 11.2.
Выходной сигнал масштабного усилителя 11.2 γ21= U•1/μ подается на второй (суммирующий) вход сумматора 19.2, на первый (вычитающий) вход которого подается сигнал γ11 с выхода масштабного усилителя 11.1 (γ11= n•k/μ) . Выходной сигнал сумматора 12.1: .
.
При этом gтр - требуемое (расчетное) значение часового расхода топлива, соответствующее текущим (реальным) значениям n, U.
Выходной сигнал сумматора 12.1, равный gтр, подается на информационный вход ключевого элемента 15, на первый (суммирующий) вход сумматора 12.2, на первый (вычитающий) вход сумматора 12.3. На вторые (вычитающие) входы сумматоров 12.2, 12.3 подается сигнал u16≡ Δ/2 с выхода источника опорного напряжения 16. На третий (вычитающий) вход сумматора 12.2 и на третий (суммирующий) вход сумматора 12.3 подается сигнал gф с выхода датчика 2, соответствующий фактическому (текущему) значению часового расхода топлива.
Выходной сигнал сумматора 12.2:
y2= gтр-gф-Δ/2. .
Если y2<0, то сигнал y2 через вентиль 13.1 подается на первый вход элемента И 14.
Выходной сигнал сумматора 12.3:
y3= gф-gтр-Δ/2. .
Если y3<0, то сигнал y3 через вентиль 13.2 подается на второй вход элемента И 14. Если одновременно выполняются условия y2<0, y3<0, то на выходе элемента И 14 появится сигнал логической единицы (сигнал Z), который подается на второй выход блока 6 и на управляющий вход ключевого элемента 15, закрывая его (разрывая цепь прохождения информационного сигнала).
Таким образом, если появляется сигнал Z, то это означает, что отображающая точка  (движитель работоспособен).
(движитель работоспособен).
Если Z = 0, то ключевой элемент 15 открыт. При этом на его выходе появится сигнал gтр. Появление сигнала gтр на выходе блока 6 означает, что отображающая точка  находится вне области G'. Сигнал с первого выхода блока 6, равный gтр, подается на первый вход блока логической обработки 9, сигнал со второго выхода блока 6, равный Z, - на первый вход блока индивидуальной сигнализации 8.
находится вне области G'. Сигнал с первого выхода блока 6, равный gтр, подается на первый вход блока логической обработки 9, сигнал со второго выхода блока 6, равный Z, - на первый вход блока индивидуальной сигнализации 8.
Блок диагностирования двигателя 7 (фиг. 3) работает следующим образом.
В блоке 7 сигнал n с выхода датчика частоты вращения 3 подается на вход масштабного усилителя 17.1, коэффициент передачи которого равен m/ψ . Выходной сигнал масштабного усилителя 17.1  подается на первый (вычитающий) вход сумматора 18.1.
подается на первый (вычитающий) вход сумматора 18.1.
Выходной сигнал Me датчика мощности 4 подается на вход масштабного усилителя 17.2, коэффициент передачи которого равен 1/ψ . Выходной сигнал масштабного усилителя 17.2  подается на второй (суммирующий) вход сумматора 18.1. Выходной сигнал сумматора 18.1
подается на второй (суммирующий) вход сумматора 18.1. Выходной сигнал сумматора 18.1 ,
,
где - требуемое (расчетное) значение часового расхода топлива при определенных значениях Me, n.
- требуемое (расчетное) значение часового расхода топлива при определенных значениях Me, n.
Выходной сигнал сумматора 18.1  подается на информационный вход ключевого элемента 21, на первый (вычитающий) вход сумматора 18.2, на первый (суммирующий) вход сумматора 18.3.
подается на информационный вход ключевого элемента 21, на первый (вычитающий) вход сумматора 18.2, на первый (суммирующий) вход сумматора 18.3.
Выходной сигнал датчика часового расхода топлива 2, пропорциональный текущему (фактическому) значению расхода топлива gф, подается на третий (суммирующий) вход сумматора 18.2 и на третий (вычитающий) вход сумматора 18.3, на вторые (вычитающие) входы которых подается сигнал u22≡ Δ/2 с выхода источника опорного напряжения 22.
Выходной сигнал сумматора 18.2 .
.
Если  , то сигнал
, то сигнал  через вентиль 19.1 подается на первый вход элемента И 20.
через вентиль 19.1 подается на первый вход элемента И 20.
Выходной сигнал сумматора 18.3: .
.
Если  , то сигнал
, то сигнал  через вентиль 19.2 подается на второй вход элемента И 20.
через вентиль 19.2 подается на второй вход элемента И 20.
Если одновременно выполняются условия, что  , то на выходе элемента И 20 появится сигнал логической единицы (сигнал Ф), который подается на управляющий вход ключевого элемента 21 и на второй выход блока 7. Появление сигнала Ф на втором выходе блока 7 соответствует нахождению отображающей точки η (Me, n) в области Q'.
, то на выходе элемента И 20 появится сигнал логической единицы (сигнал Ф), который подается на управляющий вход ключевого элемента 21 и на второй выход блока 7. Появление сигнала Ф на втором выходе блока 7 соответствует нахождению отображающей точки η (Me, n) в области Q'.
Если Ф = 0, то ключевой элемент 21 открыт. При этом на его выходе появится сигнал  , который подается на первый выход блока 7. Появление сигнала
, который подается на первый выход блока 7. Появление сигнала  на выходе блока 7 означает, что отображающая точка η находится вне области Q'.
на выходе блока 7 означает, что отображающая точка η находится вне области Q'.
Выходной сигнал  с первого выхода блока диагностирования двигателя 7 подается на второй вход блока логической обработки 9, сигнал со второго выхода блока 7, равный Ф, - на второй вход блока индивидуальной сигнализации 8.
с первого выхода блока диагностирования двигателя 7 подается на второй вход блока логической обработки 9, сигнал со второго выхода блока 7, равный Ф, - на второй вход блока индивидуальной сигнализации 8.
Блок индивидуальной сигнализации 8 (фиг. 4) работает следующим образом.
При подаче сигнала со второго выхода блока диагностирования движителя 6 сработает индикаторный элемент 23.1, например, загорается. Это свидетельствует о том, что движитель пропульсивного комплекса судна работоспособен.
При подаче сигнала со второго выхода блока диагностирования двигателя 7 (сигнала Ф) сработает индикаторный элемент 23.2, что свидетельствует о том, что двигатель пропульсивного комплекса судна работоспособен.
Блок логической обработки 9 (фиг. 6) работает следующим образом. Сигнал gтр первого выхода блока диагностирования движителя 6 подается на первый (суммирующий) вход сумматора 28.1 и на второй вход элемента И 29.3.
Сигнал  с первого выхода блока диагностирования двигателя 7 подается на второй (вычитающий) вход сумматора 28.1, на второй вход элемента И 29.2 и на первый вход элемента И 29.1.
с первого выхода блока диагностирования двигателя 7 подается на второй (вычитающий) вход сумматора 28.1, на второй вход элемента И 29.2 и на первый вход элемента И 29.1.
Сигнал gф с выхода датчика 3 подается на второй (суммирующий) вход сумматора 28.2 и на второй вход узла деления (элемента деления) 32.
Сигнал с выхода датчика глубины фарватера 5 подается на управляющий вход ключевого элемента 31 и на второй вход элемента И 29.1.
Блок логической обработки 9 (фиг. 6) работает в двух режимах:
а) глубина фарватера больше Hmin (например, Hmin = 4 м). При этом выходной сигнал датчика глубины фарватера 5 равен нулю.
б) глубина фарватера меньше Hmin. При этом выходной сигнал датчика 5 равен логической единице.
1. Глубина фарватера больше Hmin.
При этом сигнал на втором входе элемента И 29.1 и на входе управления ключевого элемента 31 равен нулю. Ключевой элемент 31 открыт (существует цепь прохождения информационного сигнала).
Выходной сигнал сумматора 28.1 .
.
Если  , то сигнал
, то сигнал  через ключевой элемент 31, вентиль 34.1 подается на первый выход блока 9 и на первый вход элемента И 29.3, на второй вход которого подается сигнал gтр. Выходной сигнал элемента И 29.3, равный gтр, подается через элемент ИЛИ 30.2 на первый (вычитающий) вход сумматора 28.2, на второй (суммирующий) вход которого подается сигнал gф.
через ключевой элемент 31, вентиль 34.1 подается на первый выход блока 9 и на первый вход элемента И 29.3, на второй вход которого подается сигнал gтр. Выходной сигнал элемента И 29.3, равный gтр, подается через элемент ИЛИ 30.2 на первый (вычитающий) вход сумматора 28.2, на второй (суммирующий) вход которого подается сигнал gф.
Выходной сигнал сумматора 28.2
подается на первый вход узла деления 32, на второй вход которого подается сигнал gф.
Выходной сигнал узла деления 32, равный ϕ = (gф-gтр)/gф, , подается на вход усилителя 33 с коэффициентом усиления k33. Выходной сигнал усилителя 33  подается на третий выход блока 9.
подается на третий выход блока 9.
Если K33 = 100, то выходной сигнал усилителя 33 равен величине относительного отклонения фактического расхода топлива от требуемого, выраженного в %.
Т. о., появление сигналов одновременно на первом и третьем выходах блока 9 свидетельствует о том, что причиной отклонения фактического расхода топлива от требуемого (заданного) является движитель судна.
Если  , то выходной сигнал сумматора 28.1
, то выходной сигнал сумматора 28.1  через ключевой элемент 31, вентиль 34.2, элемент ИЛИ 30.1 подается на первый вход элемента И 29.2, на второй вход которого подается сигнал
через ключевой элемент 31, вентиль 34.2, элемент ИЛИ 30.1 подается на первый вход элемента И 29.2, на второй вход которого подается сигнал  . Выходной сигнал элемента И 29.2, равный
. Выходной сигнал элемента И 29.2, равный  , через элемент ИЛИ 30.2 подается на первый вход сумматора 28.2, на второй вход которого подается сигнал gф. Затем цикл работы блока 9 повторяется.
, через элемент ИЛИ 30.2 подается на первый вход сумматора 28.2, на второй вход которого подается сигнал gф. Затем цикл работы блока 9 повторяется.
Выходной сигнал элемента ИЛИ 30.1 подается также на второй выход блока 9.
Появление сигналов одновременно на втором и третьем выходах блока 9 свидетельствует о том, что причиной отклонения фактического расхода топлива от номинального (требуемого, заданного) значения является двигатель пропульсивного комплекса судна.
Выходной сигнал усилителя 33 при этом
показывает величину относительного отклонения фактического расхода топлива от заданного значения, выраженной, например, в процентах (при k' = 100).
2. Глубина фарватера меньше Hmin.
При этом сигнал датчика глубины фарватера 5, равный логической единице, подается на второй вход элемента И 29.1 и на управляющий вход ключевого элемента 31. При этом ключевой элемент 31 закрыт (разрыв цепи прохождения информационного сигнала).
На первый вход элемента И 29.1 подается сигнал  .
.
Второй сигнал элемента И 29.1, равный  , через элемент ИЛИ 30.1 подается на второй выход блока 9 и на первый вход элемента И 29.2, на первый вход которого подается сигнал gф. Затем цикл работы блока 9 повторяется.
, через элемент ИЛИ 30.1 подается на второй выход блока 9 и на первый вход элемента И 29.2, на первый вход которого подается сигнал gф. Затем цикл работы блока 9 повторяется.
Таким образом, при глубине фарватера меньше Hmin причиной отклонения фактического расхода топлива от заданного значения является двигатель судна.
Выходные сигналы блока 9 подаются на соответствующие входы блока отображения информации 10 (фиг. 5). При появлении сигнала на первом входе блока 10 загорается (сработает) индикаторный элемент 25.1, что свидетельствует о том, что причиной отклонения фактического расхода топлива от заданного значения является движитель судна. При появлении сигнала на втором входе блока 10 сработает индикаторный элемент 25.2, что свидетельствует о том, что причиной отклонения фактического расхода топлива от заданного значения является двигатель судна. Показания узла индикации 26 позволяют наглядно оценить величину отклонения фактического расхода топлива от заданного значения, например, в процентах.
В результате применения предложенного устройства:
- повышается достоверность контроля работоспособности пропульсивного комплекса судна из-за учета дополнительного числа контролируемых параметров (глубины фарватера), а также из-за аппроксимации реальной области работоспособности многоугольником (параллелограммом);
- увеличивается глубина контроля за счет определения причины необоснованного расхода топлива (винт или двигатель);
- расширяется сфера применения за счет использования типовых элементов для реализации устройства, а также за счет использования устройства для контроля работоспособности пропульсивного комплекса для судов различного типа.
Устройство работает в режиме реального времени. Повышается надежность за счет использования только пяти датчиков информации.
Устройство облегчает работу теплотехнических партий, а при достаточной подготовленности команды судна позволит отказаться от их услуг. (Т.П.)е
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКОНОМИЧНОСТИ РАБОТЫ АВТОНОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 1997 |
|
RU2128830C1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 1994 |
|
RU2081786C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| Устройство для контроля ресурса газогенератора турбореактивного двигателя | 1986 |
|
SU1399787A1 |
| Устройство регулирования мощности судовой дизельной установки | 1988 |
|
SU1601025A1 |
| Устройство для диагностирования технического состояния транспортных средств | 1987 |
|
SU1508127A1 |
| Система регулирования подачи топлива транспортного дизеля | 1986 |
|
SU1348549A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕДИТЕЛЬНОГО УПРАВЛЕНИЯ СУДОВОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2021 |
|
RU2758465C1 |
| Устройство для диагностирования судового двигателя внутреннего сгорания | 1991 |
|
SU1777026A1 |

Устройство контроля работоспособности пропульсивного комплекса судна предназначено для выявления причин необоснованного расхода топлива пропульсивным комплексом. Устройство содержит датчик скорости хода, датчик часового расхода топлива, датчик мощности, датчик частоты вращения, блок индивидуальной сигнализации, блок логической обработки, блок отражения информации, датчик глубины фарватера, блок диагностирования движителя и блок диагностирования двигателя. Выход датчика частоты вращения соединен с объединенными первыми входами блока диагностирования движителя и блока диагностирования двигателя, вторые объединенные входы которых соединены с выходом датчика часового расхода топлива. Третий вход блока диагностирования движителя соединен с выходом датчика скорости хода, а первый выход - с первым входом блока логической обработки, второй выход - с первым входом блока индивидуальной сигнализации, второй вход которого соединен со вторым выходом блока диагностирования. Третий вход блока диагностирования двигателя соединен с выходом датчика мощности, а первый выход - со вторым входом блока логической обработки, третий вход которого соединен с выходом датчика глубины фарватера, четвертый - с выходом датчика часового расхода топлива. Первый, второй и третий выходы блока логической обработки соединены соответственно с первым, вторым и третьим входами блока отражения информации. Достигается повышение достоверности контроля работоспособности пропульсивного комплекса судна. 8 ил.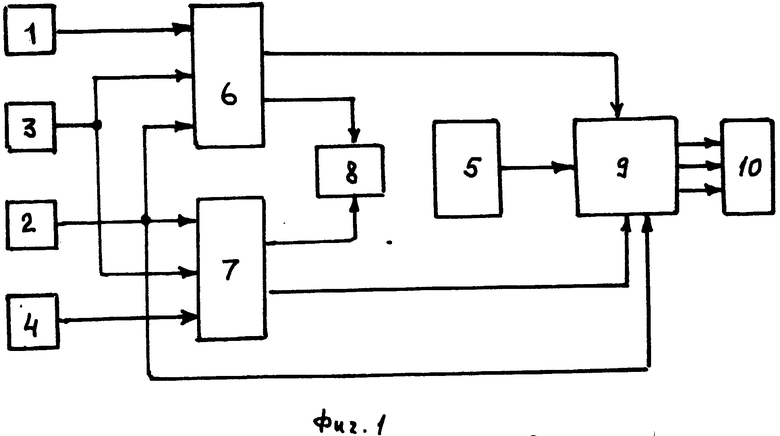
Устройство контроля работоспособности пропульсивного комплекса судна, содержащее датчик скорости судна, датчик часового расхода топлива, датчик мощности, датчик частоты вращения, блок индивидуальной сигнализации, блок логической обработки, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами блока отображения информации, отличающееся тем, что дополнительно содержит датчик глубины фарватера, блок диагностирования движителя и блок диагностирования двигателя, при этом выход датчика частоты вращения соединен с объединенными первыми входами блока диагностирования движителя и блока диагностирования двигателя, вторые объединенные входы которых соединены с выходом датчика часового расхода топлива, выход датчика скорости подключен к третьему входу блока диагностирования движителя, первый выход которого соединен с первым входом блока логической обработки, второй выход - с первым входом блока индивидуальной сигнализации, выход датчика мощности соединен с третьим входом блока диагностирования двигателя, первый выход которого соединен с вторым входом блока логической обработки, второй выход - с вторым входом блока индивидуальной сигнализации, выход датчика часового расхода топлива соединен с третьим входом блока логической обработки информации, четвертый вход которого соединен с выходом датчика глубины фарватора.

