Изобретение относится к радиотехнике и может использоваться в радиомаячных системах навигации.
Известные амплитудные моноимпульсные пеленгаторы содержат антенну с двумя разнесенными по углу диаграммами направленности (ДН) и два логарифмических приемника, соединенных с вычитателем.
Наиболее близким к предлагаемому пеленгатору можно считать пеленгатор [1], содержащий антенну с двумя одинаковыми, разнесенными по углу ДН и двумя выходами, каждый из которых через логарифмический приемник соединен с входом вычитателя. Оценка пеленга в таком пеленгаторе при неследящем пеленговании производится по измеренному значению разностной амплитуды на выходе вычитателя и ее априори известной зависимости от пеленга - пеленгационной характеристике (ПХ), предполагающейся линейной в некотором секторе пеленгования. Крутизна ПХ, определяющая пеленгационную чувствительность (ПЧ) такого пеленгатора, обратно пропорциональна квадрату ширины его ДН.
Наличие рассеивающей среды нарушает когерентность поля в месте приема и вызывает известное расширение ДН антенн [2]. Степень подобного расширения в зависимости от условий распространения на трассе может достигать полутора-двух раз, что является причиной трехкратного и более снижения ПЧ по сравнению с ее значением в когерентном поле.
Другой причиной изменения ширины ДН (а, следовательно, и ПЧ) является изменение частоты излучения источника. Использование в этих условиях для определения пеленга значения ПЧ справедливого для когерентного поля приводит в известном моноимпульсном пеленгаторе [1] к появлению дополнительной ошибки (смещению оценки пеленга), к нестабильности ПЧ в диапазоне изменения частоты сигнала и вариациях условий распространения радиоволн на трассе.
Предлагаемый моноимпульсный пеленгатор позволяет стабилизировать пеленгационную чувствительность и повысить точность пеленгования источников излучения в рассеивающих средах.
С этой целью в известном моноимпульсном пеленгаторе [1], содержащем антенну с двумя одинаковыми, разнесенными по углу ДН и с двумя выходами, каждый из которых через логарифмический приемник подключен к соответствующему входу первого вычитателя, антенна выполнена с тремя одинаковыми с регулируемой шириной диаграммами направленности, две из которых симметрично отвернуты относительно средней диаграммы на величину углового разнесения, и имеет управляющий шириной диаграмм направленности вход и третий выход.
Кроме того, введены третий логарифмический приемник, подключенный к третьему выходу антенны, второй вычитатель, входы которого соединены с выходами второго и третьего логарифмических приемников, первый сумматор и третий вычитатель, входы которых подключены к выходам первого и второго вычитателей, а также четыре делителя, индикатор, блок вычисления квадратного корня, четвертый вычитатель, второй сумматор, квадратор, блок задержки, клемма ввода значения углового разнесения и клемма ввода стабилизируемого значения пеленгационной чувствительности, причем выход первого сумматора подключен к второму входу первого делителя, выход которого соединен с индикатором.
Управляющий вход антенны через последовательно соединенные блок задержки и квадратор подключен к первому входу второго сумматора, выход которого через блок вычисления квадратного корня соединен с управляющим входом антенны. Выход третьего вычитателя соединен с первым входом третьего делителя, выход которого подключен к первым входам первого и второго делителей. Клемма ввода стабилизируемого значения пеленгационной чувствительности подключена к первому входу четвертого делителя, второй вход которого соединен с вторыми входами второго и третьего делителей и клеммой ввода значения углового разнесения. Выходы второго и четвертого делителей соединены с входами четвертого вычитателя, выход которого подключен к второму входу второго сумматора.
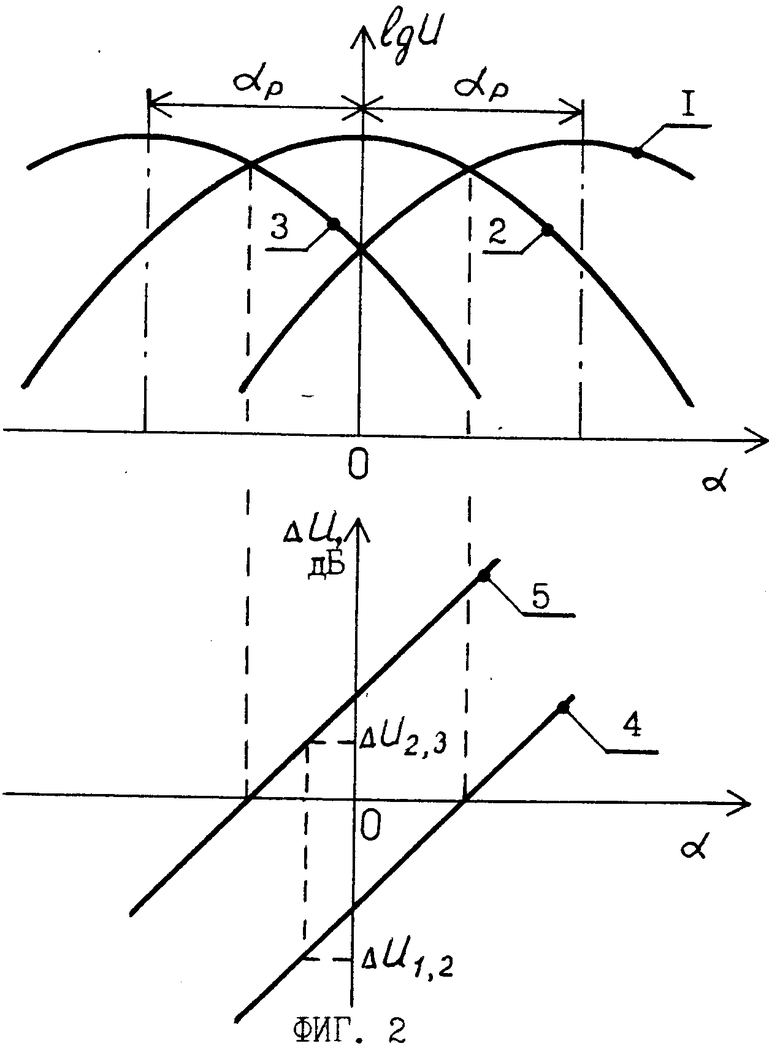
На фиг. 1 приведена структурная схема моноимпульсного пеленгатора; на фиг. 2 - принцип формирования оценки пеленга.
Моноимпульсный пеленгатор (фиг. 1) содержит антенну 1 с тремя одинаковыми с регулируемой шириной диаграммами направленности, с управляющим шириной диаграмм направленности входом и тремя выходами, три логарифмических приемника 2, 3, и 4, первый 5 и второй 6 вычитатели, первый сумматор 7, первый делитель 8, индикатор 9, блок 10 вычисления квадратного корня, второй делитель 11, четвертый вычитатель 12, второй сумматор 13, третий 14 и четвертый 15 делители, квадратор 16, третий вычислитель 17, блок 18 задержки, клемму К2 ввода стабилизируемого значения пеленгационной чувствительности и клемму К1 ввода значения углового разнесения.
На фиг. 2 позициями 1, 2 и 3 обозначены соответственно первая, вторая и третья диаграммы направленности пеленгатора, отображаемые на выходах логарифмических приемников, а позициями 3 и 4 отмечены парциальные пеленгационные характеристики.
Для описания работы пеленгатора необходимо сделать некоторые аналитические пояснения.
Пеленгационная характеристика обычного 2-х канального пеленгатора аналитически представляется в виде выраженной в децибеллах, разностной амплитуды ΔU от пеленга α, отсчитываемого обычно от равносигнального направления:
где
ΔU - разностная амплитуда, дБ;
U1, U2 - амплитуды на выходах антенны;
αp - величина углового разнесения ДН, град.;
α - пеленг, град.;
θ - ширина ДН пеленгатора на уровне 3 дБ от максимума, град.;
- крутизна ПХ - пеленгационная чувствительность пеленгатора в когерентном поле, (дБ/град).
Из (1) и (2) следует обычно используемый алгоритм пеленгования
При частично когерентном поле в месте приема, выражение для ПЧ можно получить в виде
где
μ - действительная, существующая в данных условиях распространения радиоволн, крутизна ПХ;
θэфф - эффективная, реально существующая в данных условиях распространения на частоте сигнала, ширина ДН пеленгатора;
θs - ширина углового спектра поля в месте приема, зависящая от условий распространения радиоволн на трассе.
В общем случае θэфф больше θ и только в когерентном поле (когда θs= 0) они равны. Из этого следует, что крутизна μ в общем случае меньше крутизны μo, а оценка пеленга, производимая на трассах с рассеянием по алгоритму (3), оказывается смещенной, причем в сторону ее приближения к равносигнальному направлению. Использование трехлучевой, трехканальной структуры моноимпульсного пеленгатора позволяет избежать подобного смещения оценки.
Учитывая (3) и фиг. 2, выражения для пеленга, отсчитываемого от положения максимума средней ДН, по двум линейным в некотором секторе, перекрывающимся парциальным пеленгационным характеристикам 3 и 4, могут быть представлены в виде системы
где
- разности логарифмов амплитуд, соответственно, между первым - вторым и вторым - третьим выходами антенны, дБ.
Решение системы приводит к необходимым алгоритмам оценки неизвестных значений ПЧ и пеленга

где
Алгоритм (6) и (7) позволяют устранить смещение оценки пеленга посредством исключения априорной неопределенности в ПЧ. Вместе с тем это не устраняет нестабильность ПЧ в диапазоне изменения частоты сигнала и меняющихся условиях распространения радиоволн, что, например, приводит к неравноточности измерений.
Из (4) следует, что добиться стабилизации ПЧ можно посредством изменения ширины ДН θ, что и реализуется в рассматриваемом пеленгаторе.
Для задаваемого из тех или иных соображений (программно) стабилизируемого значения ПЧ можно записать
где
θ1 - требуемая для выполнения этого равенства, величина ширины ДН пеленгатора;
μст = - стабилизируемое значение пеленгационной чувствительности.
Из (8) следует необходимое условие стабилизации ПЧ
Для получения из (9) алгоритма адаптивной перестройки ширины ДН, необходимо определить неизвестную, существующую в данных условиях распространения, ширину углового спектра поля θs. Ее значение следует из (4)
где
μ в рассматриваемом пеленгаторе определяется по алгоритму (6).
В результате, после использования (10) в (9), искомый алгоритм имеет вид выражения, описывающего процесс адаптивной перестройки ширины диаграмм направленности моноимпульсного пеленгатора:
где
θ1 является последующим (требуемым), а θ - настоящим, существующим в момент оценки μ по алгоритму (6), значениями ширины ДН.
Динамика работы адаптивного алгоритма перестройки ширины ДН заключается в следующем.
В том случае, если существующая при данных условиях распространения и частоте сигнала, пеленгационная чувствительность μ, оцениваемая по (6), совпадает с требуемым (заданным) ее значением μст, то разность в круглых скобах (11) равна нулю. Требуемое значение θ1= θ и перестройки ширины ДН не происходит. Если же по причине уменьшения частоты сигнала (что ведет к увеличению θ), или изменения условий распространения на трассе, μ становится меньше μст, то разность оказывается отрицательной, что ведет к уменьшению θ1, а значит и к повышению ПЧ до выполнения равенства μ = μст, и, наоборот, если μ больше μст, то разность в круглых скобах (11) оказывается положительной, что увеличивает ширину ДН, снижая тем самым ПЧ до уровня μ = μст.
Работу пеленгатора в целом, можно объяснить следующим образом.
Антенна 1 формирует три одинаковые ДН, из которых первая и третья симметрично отвернуты относительно второй - средней ДН на величину углового разнесения αp. Колебания с выходов антенны усиливаются, логарифмируются, детектируются в логарифмических приемниках 2 - 4 и далее в вычитателях 5 и 6 вычитаются. При этом амплитуда разностного сигнала (ΔU1,2), образующаяся на выходе вычитателя 5, пропорциональна разности логарифмов амплитуд на первом и втором выходах антенны, а разностная амплитуда (ΔU2,3), образующаяся на выходе вычитателя 6, пропорциональна разности логарифмов амплитуд на втором и третьем выходах антенны.
Далее, разностные амплитуды ΔU1,2 и ΔU2,3 суммируются в сумматоре 7, образуя суммарную амплитуду Σ и вычитаются в вычитателе 17, на выходе которого формируется разностная амплитуда δ. В делителе 14 амплитуда δ делится на введенное на клемму К1 значение углового разнесения ДН пеленгатора, в результате чего на выходе делителя 14 согласно алгоритма (6), образуется существующее в настоящий момент значение пеленгационной чувствительности μ. Посредством деления суммарной амплитуды Σ на удвоенное значение ПЧ μ на выходе делителя 8 в соответствии с алгоритмом (7) формируется оценка пеленга, отображаемая на индикаторе 9.
Для формирования сигнала адаптивной перестройки ширины ДН пеленгатора, т.е. реализации алгоритма (11), в делителе 11 производится частотного от деления αp/μ, которое поступает на вход вычитателя 12. Аналогично, в делителе 15 образуется частотное от деления углового разнесения αp на введенное на клемму К2 стабилизируемое значение пеленгационной чувствительности μст, задаваемое из тех или иных соображений. Частное от деления αp/μст подается на вход вычитателя 12, где происходит образование разности αp/μст-αp/μ, которая с коэффициентом пропорциональности равным 24, поступает на второй вход сумматора 13. На первый вход этого сумматора с выхода квадратора 16 подается величина квадрата, существующего в настоящий момент значения ширины ДН пеленгатора (θ2).. В результате суммирования и извлечения квадратного корня в блоке 10, на его выходе, а следовательно, и входе блока задержки 18 и управляющем входе антенны, в соответствии с алгоритмом (11) формируется сигнал управления, соответствующий требуемому значению ширины ДН пеленгатора θ1. В антенне 1 происходит установка этого значения.
Блок задержки 18 обеспечивает задержку использования последующего значения ширины ДН θ1, в качестве существующей в данный момент ширины θ. Величина задержки определяется временем, необходимым для формирования нового значения сигнала управления. Это время ориентировочно складывается из времени перестройки ширины ДН в антенне и времени запаздывания сигналов от антенны до сумматора 13.
Использование моноимпульсного пеленгатора обеспечивает, во-первых, уменьшение смещения оценок пеленга вследствие устранения априорной неопределенности в пеленгационной чувствительности; во-вторых, ее стабилизацию на заданном уровне посредством адаптивной перестройки ширины ДН; в третьих, следующую из этого возможность программного управления пеленгационной чувствительностью в диапазоне вариаций условий распространения радиволон в рассеивающих средах и, в-четвертых, - частотную независимость, означающую отсутствие необходимости измерения частоты принимаемого сигнала.
Источники информации
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Советское радио, 1970, с. 18, рис. 1.7.
2. Шифрин Я.С. Вопросы статистической теории антенн. - М.: Советское радио, 1970, с. 265 - 266.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1993 |
|
RU2078348C1 |
| ПЕЛЕНГАТОР | 1993 |
|
RU2115133C1 |
| ПЕЛЕНГАТОР СКАНИРУЮЩИХ ИСТОЧНИКОВ | 1992 |
|
RU2074404C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР СКАНИРУЮЩИХ ИСТОЧНИКОВ | 1993 |
|
RU2073878C1 |
| РАДИОПЕЛЕНГАТОР | 1979 |
|
SU1015750A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШИРИНЫ ФУНКЦИИ РАССЕЯНИЯ СРЕДЫ | 2001 |
|
RU2204844C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ В РАССЕИВАЮЩИХ СРЕДАХ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ ИМПУЛЬСНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ И ПАССИВНЫЙ РАДИОДАЛЬНОМЕР | 1999 |
|
RU2166770C1 |
| ИЗМЕРИТЕЛЬ ШИРИНЫ ФУНКЦИИ РАССЕЯНИЯ СРЕДЫ | 2001 |
|
RU2191404C2 |
| ПЕЛЕНГАТОР ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1979 |
|
SU754988A1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2065172C1 |
Изобретение может использоваться в радиомаячных системах навигации. Моноимпульсный пеленгатор обеспечивает, во-первых, повышение точности пеленгования, вследствие устранения априорной неопределенности в пеленгационной чувствительности (ПЧ), во-вторых,- ее стабилизацию на заданном уровне посредством адаптивной перестройки ширины диаграмм направленности (ДН), в-третьих, - следующую из этого возможность программного управления ПЧ в диапазоне вариаций распространения радиоволн в рассеивающих средах и, в-четвертых,-частотную независимость, означающую отсутствие необходимости измерения частоты принимаемого сигнала. Сущность изобретения заключается в том, что в моноимпульсном пеленгаторе, содержащем антенну с двумя одинаковыми, разнесенными по углу ДН и с двумя выходами, каждый из которых через логарифмический приемник подключен к соответствующему входу первого вычитателя, антенна, выполненная с тремя одинаковыми, с регулируемой шириной диаграммами направленности, две из которых симметрично отвернуты относительно средней диаграммы на величину углового разнесения, имеет управляющий шириной ДН вход и третий выход. Кроме того введены, третий логарифмический приемник, подключенный к третьему выходу антенны, второй вычитатель, входы которого соединены с выходами второго и третьего логарифмических приемников, первый сумматор и третий вычитатель, входы которых подключены к выходам первого и второго вычитателей, а также четыре делителя, индикатор, блок вычисления квадратного корня, четвертый вычитатель, второй сумматор, квадратор, блок задержки, клемма ввода значения углового разнесения и клемма ввода стабилизируемого значения ПЧ, причем выход первого сумматора подключен к второму входу первого делителя, выход которого соединен с индикатором. Управляющий вход антенны через последовательно соединенные блок задержки и квадратор подключен к первому входу второго сумматора, выход которого через блок вычисления квадратного корня соединен с управляющим входом антенны. Выход третьего вычитателя соединен с первым входом третьего делителя, выход которого подключен к первым входам первого и второго делителей. Клемма ввода стабилизируемого значения ПЧ подключена к первому входу четвертого делителя, второй вход которого соединен с вторыми входами второго и третьего делителей и клеммой ввода значения углового разнесения. Выходы второго и четвертого делителей соединены с входами четвертого вычитателя, выход которого подключен к второму входу второго сумматора. 2 ил.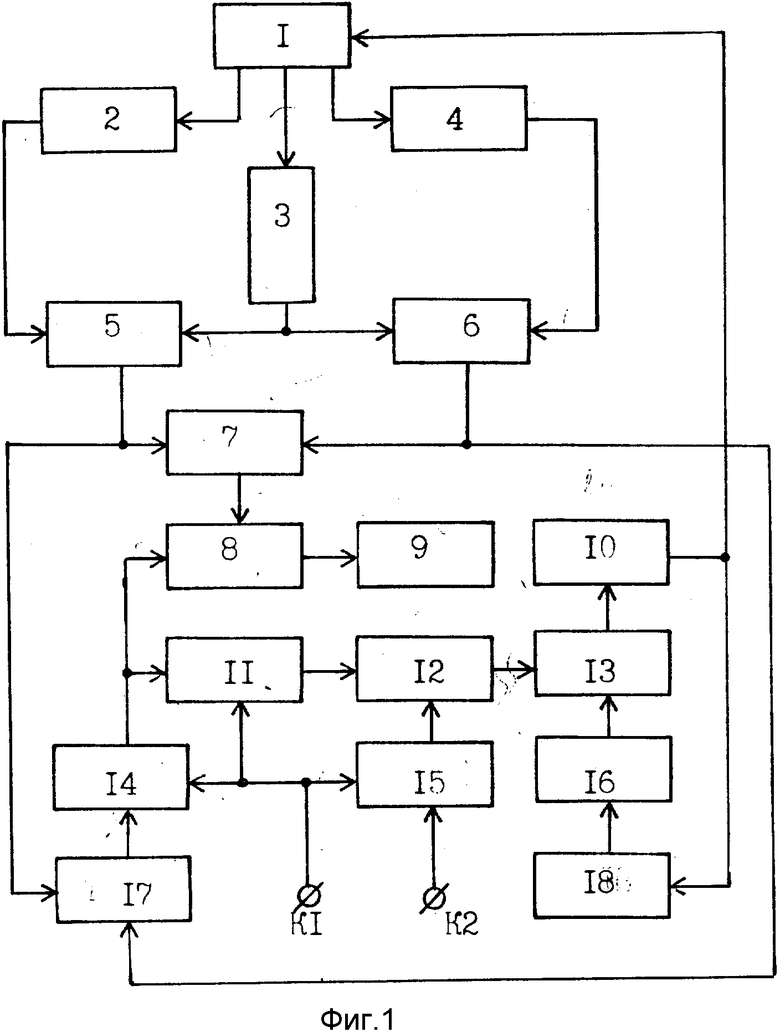
Моноимпульсный пеленгатор, содержащий антенну с двумя одинаковыми, разнесенными по углу диаграммами направленности и с двумя выходами, каждый из которых через логарифмический приемник подключен к соответствующему входу первого вычитателя, отличающийся тем, что антенна выполнена с тремя одинаковыми с регулируемой шириной диаграммами направленности, две из которых симметрично отвернуты относительно средней диаграммы на величину углового разнесения, и имеет управляющий шириной диаграмм направленности вход и третий выход, а также введены третий логарифмический приемник, подключенный к третьему выходу антенны, второй вычитатель, входы которого соединены с выходами второго и третьего логарифмических приемников, первый сумматор и третий вычитатель, входы которых подключены к выходам первого и второго вычитателей, четыре делителя, индикатор, блок вычисления квадратного корня, четвертый вычитатель, второй сумматор, квадратор, блок задержки, клемма ввода значения углового разнесения и клемма ввода стабилизируемого значения пеленгационной чувствительности, причем выход первого сумматора подключен к второму входу первого делителя, выход которого соединен с индикатором, управляющий вход антенны через последовательно соединенные блок задержки и квадратор подключен к первому входу второго сумматора, выход которого через блок в вычисления квадратного корня соединен с управляющим входом антенны, выход третьего вычитателя соединен с первым входом третьего делителя, выход которого подключен к первым входам первого и второго делителей, клемма ввода стабилизируемого значения пеленгационной чувствительности подключена к первому входу четвертого делителя, второй вход которого соединен с вторыми входами второго и третьего делителей и клеммой ввода значения углового разнесения, выходы второго и четвертого делителей соединены с входами четвертого вычитателя, выход которого подключен к второму входу второго сумматора.
| Леонов А.И., Фомичев К.И., Моноимпульсная радиолокация | |||
| - М.: Советское Р адио, 1970, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
