Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах летательных аппаратов.
Известен гидравлический привод с дросселирующим гидрораспределителем, содержащим электромеханический преобразователь, золотниковый гидрораспределитель и гидроцилиндр [1, c. 107, рис. 5.2, а].
Недостатком привода является относительно невысокая надежность, высокие требования к частоте рабочей жидкости и мощности преобразователя. Известен следящий привод, содержащий задающее устройство, усилитель со струйной трубкой и гидродвигатель [2, c. 11, рис. 3].
Недостатками привода являются склонность струйной трубки к автоколебаниям при высоких давлениях питания, что в свою очередь снижает устойчивость привода, и низкий коэффициент полезного действия, что обусловлено невысокой жесткостью характеристик.
Известен гидравлический следящий привод [3, c. 74, рис. 60], содержащий неподвижную струйную трубку, управляемый дефлектор, приемную плату, окна которой связаны с полостями гидродвигателя.
Недостатками привода являются большие усилия от гидродинамического воздействия высоконапорных струй на дефлектор и, как следствие этого, требуемая большая мощность управляющего устройства, дефлектора.
Наиболее близким по технической сущности и достигаемому эффекту является электрогидравлический следящий привод [4, c. 12, рис. 16], содержащий последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и струйный усилитель с поворотной струйной трубкой, связанной с электромеханическим преобразователем, и приемной платой, окна которой соединены с полостями гидроцилиндра, шток которого связан с цепью отрицательной обратной связи по положению со сравнивающим усилителем, выбранный в качестве прототипа.
Недостатками прототипа являются нежесткость нагрузочной характеристики [4, рис. 4.16 с.211], свойственная приводам с дроссельным регулированием, и склонность струйной трубки к автоколебаниям вследствие гидродинамического воздействия струй на струйную трубку.
Задачей, на решение которой направлено изобретение, является повышение жесткости выходной характеристики и устойчивости.
Поставленная задача достигается тем, что имеется электрогидравлический следящий привод, содержащий последовательно соединенные задатчики, сравнивающий усилитель, электромеханический преобразователь и струйный усилитель с поворотной струйной трубкой, связанной с электромеханическим преобразователем, и приемной платой, окна которой соединены с полостями гидроцилиндра, шток которого связан с цепью отрицательной обратной связи по положению со сравнивающим усилителем, отличающийся тем, что в приемной плате выполнена камера в виде плоскопараллельной щели, пересекающей конические каналы и сообщенной со сливом, при этом в верхней части платы каналы выполнены в виде конфузора, а в нижней части - в виде диффузора.
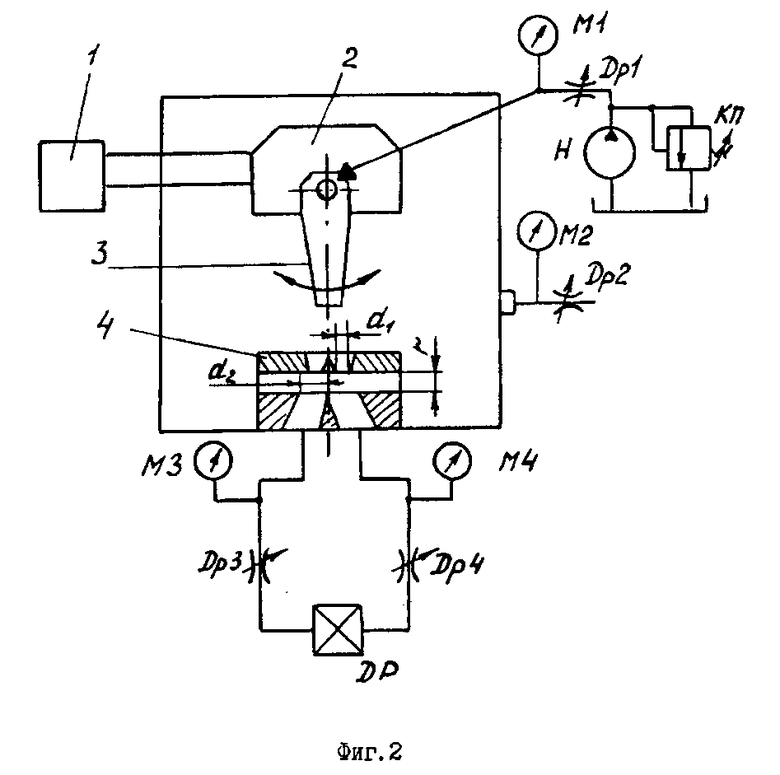
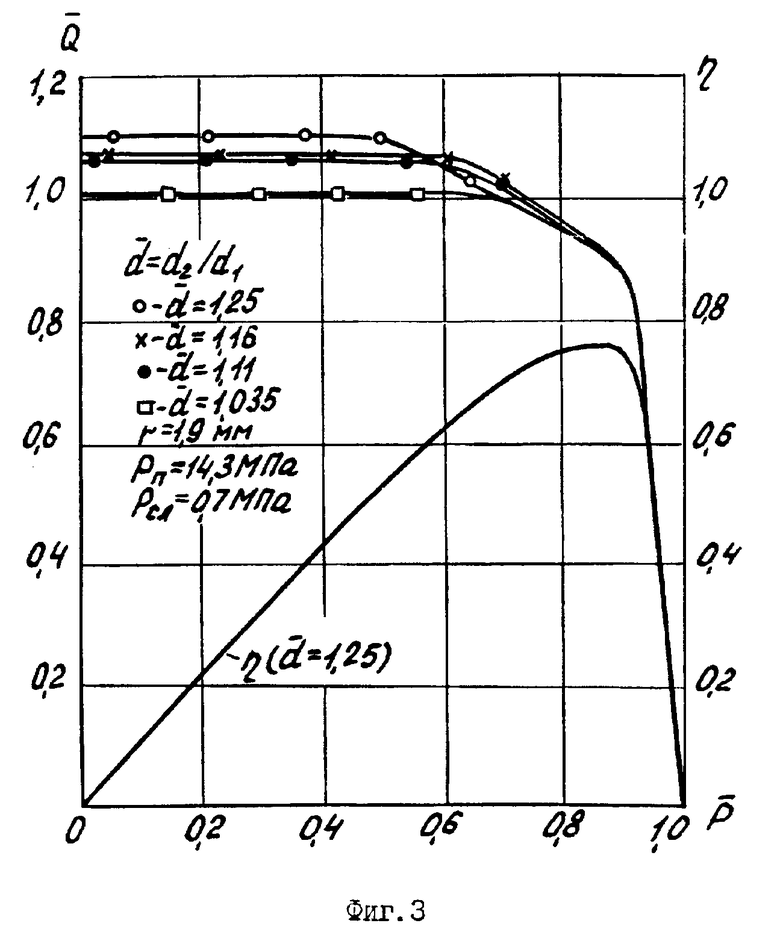
На фиг. 1 изображена схема привода с предложенной конструкцией приемной платы; на фиг. 2 - схема экспериментальной установки; на фиг. 3 - типичные экспериментальные кривые.
Электрогидравлический следящий привод содержит последовательно соединенные задатчик (на чертеже не изображен), сравнивающий усилитель 1, электрически связанный с электромеханическим преобразователем 2, и струйный усилитель 3 с поворотной струйной трубкой 4, закрепленной на валу электромеханического преобразователя 2, и приемной платой 5, конфузорные 6 и диффузорные 7 окна которой разделены плоскопараллельной щелью 8 и соединены каналы с полостями 9, 10 гидроцилиндра 11, шток 12 которого связан с цепью 13 электрической отрицательной обратной связью по положению с усилителем 1.
Электрогидравлический привод работает следующим образом.
Рабочая жидкость под давлением подается в струйную трубку 4, при нейтральном положении которой давления в полостях 9, 10 одинаковы и шток 12 неподвижен. При подаче сигнала задатчика на электромеханический преобразователь 2 струйная трубка 4 отклоняется от своего нейтрального положения, что приводит к возникновению перепада давления в полостях 9 и 10. Шток 12 перемещается под действием перепада давлений до тех пор, пока сигнал задатчика не будет скомпенсирован сигналом цепи 13 обратной связи по положению и струйная трубка не вернется в нейтральное положение.
В приемной плате 5 осуществляется эффект стабилизации расхода при изменении нагрузки на исполнительном гидродвигателе (штоке 12 гидроцилиндра 11). При нагрузке на штоке 12, составляющей 70% от максимального значения, скорость перемещения штока такая же, как и на холостом ходу при заданном отклонении струйной трубки 4. Отвод рабочей жидкости из полости гидроцилиндра осуществляется через плоскую щель 8, что исключает воздействие обратных струй на струйную трубку. В динамических режимах рассмотренный привод устойчив. Волновые явления и забросы давления в подводящих давления отсутствуют, так как струя обладает односторонней проводимостью.
Указанная конструкция приемной платы позволяет использовать так называемый струйный эффект стабилизации расхода, основанный на кавитационных явлениях и подтвержденный исследованиями [3, рис. 61, с.76]. Кроме того, при этом осуществляется отвод обратных струй, истекающих из окон приемной платы в сторону, исключая тем самым пресловутое их воздействие на струйную трубку.
Для подтверждения указанного решения на экспериментальной базе Государственного ракетного центра были проведены исследования явления стабилизации выходной характеристики привода предложенным устройством (Акт 5-12/58-87). Перепад давлений на струйном усилителе изменяется в пределах 0-21,2 МПа, минимальный диаметр сопел приемной платы изменяется в пределах: для конфузора d1= 1,612-2,416 мм, для диффузора d2=2,015-2,927 мм, ширина щели в приемной плате Г=1,2-1,9 мм, расход через струйную трубку Q0=21,7-60,9 л/мин. На всем диапазоне исследуемых параметров наблюдалась стабилизация скорости гидродвигателем по нагрузке.
Предложенное техническое решение конструктивной схемы привода позволяет помимо улучшения устойчивости привода и увеличения жесткости выходной характеристики повысить КПД привода в 2 раза, увеличить диапазон рабочих давлений приводов с подвижной струйной трубкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2153104C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2131064C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2150614C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2125667C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2015 |
|
RU2599098C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ДОЗИРОВАНИЯ ТОПЛИВА В СИЛОВЫХ УСТАНОВКАХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1996 |
|
RU2125656C1 |
| УСТРОЙСТВО ДЛЯ ВОЛНОВОЙ ОБРАБОТКИ ПЛАСТА | 1997 |
|
RU2178518C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ БИОЛОГИЧЕСКИХ ТКАНЕЙ | 1998 |
|
RU2152776C2 |
Изобретение может быть использовано в гидросистемах летательных аппаратов. В приемной плате привода выполнена камера в виде плоскопараллельной щели, пересекающей конические каналы и сообщенной со сливом. В верхней части платы каналы выполнены в виде конфузора, а в нижней части - в виде диффузора. Использование изобретения позволяет улучшить устойчивость привода увеличить жесткость выходной характеристики, повысить КПД привода и увеличить диапазон рабочих давлений приводов. 3 ил.
Электрогидравлический следящий привод, содержащий последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и струйный усилитель с поворотной струйной трубкой, связанной с электромеханическим преобразователем, и приемной платой, окна которой соединены с полостями гидроцилиндра, шток которого связан цепью отрицательной обратной связи по положению со сравнивающим усилителем, отличающийся тем, что в приемной плате выполнена камера в виде плоскопараллельной щели, пересекающей конические каналы и сообщенной со сливом, при этом в верхней части платы каналы выполнены в виде конфузора, а в нижней части - в виде диффузора.
| Смирнова В.И | |||
| и др | |||
| Основы проектирования и расчета следящих систем | |||
| - М: Машиностроение, 1983, с.107, рис.5.2.а | |||
| Крамской Э.И | |||
| Гидравлические след ящие приводы со струйными усилителями | |||
| - Л.: Машиностроение, 1972, с.11, р ис.3 | |||
| Бочаров В.П | |||
| и др | |||
| Расчет и проектирование устройств гидравлической струйной техники | |||
| - Киев, Техника, 1987, с.74, рис.60 | |||
| Баженов А.И | |||
| и др | |||
| Проектирование следящих гидравлических приводов летательных аппаратов | |||
| - М : Машиностроение, 1981, с.12, рис.16. |
