Изобретение относится к области гидроавтоматики и может быть использовано в гидросистемах летательных аппаратов.
Известен электрогидравлический следящий привод, содержащий последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и струйный усилитель с поворотной струйной трубкой, связанной с электромеханическим преобразователем, и приемной платой, окна которой соединены с полостями гидроцилиндра, шток которого связан цепью отрицательной обратной связи по положению со сравнивающим усилителем [Баженов А.И. и др. Проектирование следящих гидравлических приводов летательных аппаратов, М.: Машиностроение, 1978, с. 199, рис. 4.2].
Недостатком данного привода является зависимость скорости движения исполнительного гидродвигателя от нагрузки на выходном звене.
Известен электрогидравлический следящий привод, отличающийся от предыдущего наличием устройства обратной связи по перепаду давлений [Чупраков Ю.И. Гидропривод и средства автоматики, М.: Машиностроение, 1979, с. 109, рис. 76].
Недостатком данного привода является нежесткость характеристик привода, зависящих от величины контактного трения в гидродвигателе и в опорах нагрузки, и увеличенная ошибка по выходной координате.
Наиболее близким по технической сущности и достигаемому эффекту является электрогидравлический следящий привод, содержащий устройство обратной связи по производной от перепада давлений, выполненное в виде гидравлического конденсатора, дополнительного гидроцилиндра и нерегулируемого дросселя [Чупраков Ю.И. Гидропривод и средства автоматики, М.: Машиностроение, 1979, с. 162, рис. 112].
Недостатком прототипа является наличие ошибки по выходной координате при статической нагрузке и нежесткой связи гидродвигателя с нагрузкой, а также недостаточное демпфирование на резонансных частотах.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности работы привода при статической нагрузке и нежесткой связи гидродвигателя с нагрузкой, а также увеличение демпфирования на резонансных частотах.
Поставленная задача достигается тем, что имеется электрогидравлический следящий привод, содержащий последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и гидроусилитель, связанный с электромеханическим преобразователем и с полостями основного гидроцилиндра, шток которого связан цепью отрицательной обратной связи по положению со сравнивающим усилителем, а также устройство дополнительной обратной связи по производной от перепада давлений, содержащее гидравлический конденсатор, выполненный в виде подпружиненного поршня, в отличие от прототипа обе полости гидравлического конденсатора через нерегулируемые дроссели связаны с основным гидроцилиндром и в то же время связаны с полостями дополнительного гидроцилиндра, торцевые камеры которого соединены с полостями основного гидроцилиндра, а шток выполнен в виде дроссельных игл, изменяющих площади регулируемых дросселей, к которым подключены сопла обратной связи, а полости регулируемых дросселей связаны с давлением управления.
Существо устройства поясняется чертежом, где изображена схема предлагаемого привода.
Электрогидравлический следящий привод, содержащий последовательно соединенные задатчик (на чертеже не показан), сравнивающий усилитель 1, электрически связанный с электромеханическим преобразователем 2, гидроусилитель 3, связанный с электромеханическим преобразователем 2 и с полостями 4, 5 основного гидроцилиндра 6, шток 7 которого связан цепью 8 отрицательной обратной связи по положению со сравнивающим усилителем 1, а также устройство дополнительной обратной связи по производной от перепада давлений, содержащее гидравлический конденсатор 9, выполненный в виде подпружиненного поршня 10, в отличие от прототипа обе полости гидравлического конденсатора 9 через нерегулируемые дроссели 11, 12 связаны с основным гидроцилиндром 6 и в то же время связаны с полостями дополнительного гидроцилиндра 13, торцевые камеры 14, 15 которой соединены с полостями 4, 5 основного гидроцилиндра 6, а шток 16 выполнен в виде дроссельных игл 17, 18, изменяющих площади регулируемых дросселей 19, 20, к которым подключены сопла обратной связи 21, 22, а полости регулируемых дросселей 19, 20 связаны с давлением управления.
Электрогидравлический следящий привод работает следующим образом.
Рабочая жидкость под давлением подается в гидроусилитель 3, при отсутствии сигнала задатчика давления в полостях 4, 5 одинаковы и шток 7 неподвижен. При подаче сигнала задатчика на электромеханический преобразователь 2 возникает перепад давления в полостях 4 и 5. Шток 7 перемещается под действием перепада давлений до тех пор, пока сигнал задатчика не будет скомпенсирован сигналом цепи 8 обратной связи и сигналом дополнительной обратной связи. При подаче сигнала задатчика шток 7 под действием возникшего перепада давлений перемещается, например, вправо, давления в полостях гидравлического конденсатора 9 равны давлениям в соответствующих полостях основного гидроцилиндра 6, т.е. P1*=P1, P*2=P2, шток 16 дополнительного гидроцилиндра 13, выполненный в виде дроссельных игл 17, 18, перемещается вправо, вследствие чего изменяются площади регулируемых дросселей 19, 20. Это, в свою очередь, приводит к увеличению расхода через сопло 22 обратной связи и уменьшению расхода через сопло 21 обратной связи. В результате, давление в полости 4 увеличивается, шток 7 основного гидроцилиндра 6 перемещается вправо, тем самым реализуется положительная обратная связь по перепаду давлений на малых частотах привода.
При работе привода на больших частотах давления в полостях 4, 5 гидроцилиндра 6 отличаются от давлений в соответствующих полостях гидравлического конденсатора 9, т.е. P1 ≠ P1*, P2 ≠ P*2, а давления в торцевых камерах 14, 15 дополнительного гидроцилиндра 13 равны давлениям в соответствующих полостях гидроцилиндра 6. Искажения давлений в полостях гидравлического конденсатора 9 по сравнению с давлениями в полостях 4, 5 гидроцилиндра 6 при больших частотах достигают такой величины, что при P1 > P2 шток дополнительного гидроцилиндра 13 будет за счет разницы площадей, а также перепада давлений в торцевых камерах 14, 15 дополнительного гидроцилиндра 13 перемещаться влево, знак обратной связи изменится с плюса на минус. Тем самым реализуется отрицательная обратная связь по производной от перепада давлений на больших частотах работы привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2150614C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2131064C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2153104C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1996 |
|
RU2116524C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ДОЗИРОВАНИЯ ТОПЛИВА В СИЛОВЫХ УСТАНОВКАХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1996 |
|
RU2125656C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Электрогидравлический усилитель дляупРАВлЕНия МНОгОпОлОСТНыМ пОРшНЕВыМгидРОдВигАТЕлЕМ | 1979 |
|
SU821764A1 |
Электрогидравлический следящий привод относится к области гидроавтоматики и может быть использован в гидросистемах летательных аппаратов. Привод содержит последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь, гидроусилитель, а также устройство дополнительной обратной связи по производной от перепада давлений. Гидроусилитель связан с электромеханическим преобразователем и с полостями гидроцилиндра. Шток гидроцилиндра связан цепью отрицательной обратной связи по положению со сравнивающим усилителем. Устройство дополнительной обратной связи содержит гидравлический конденсатор, выполненный в виде подпружиненного поршня. Обе полости гидравлического конденсатора через нерегулируемые дроссели связаны с основным гидроцилиндром и в то же время с полостями дополнительного гидроцилиндра. Торцевые камеры дополнительного гидроцилиндра соединены с полостями основного гидроцилиндра. Шток выполнен в виде дроссельных игл. Иглы изменяют площади регулируемых дросселей. К дросселям подключены сопла обратной связи. Полости регулируемых дросселей связаны с давлением управления. Изобретение позволяет повысить точность в работе привода при статической нагрузке и нежесткой связи гидродвигателя с нагрузкой, а также увеличить демпфирование на резонансных частотах. 1 ил.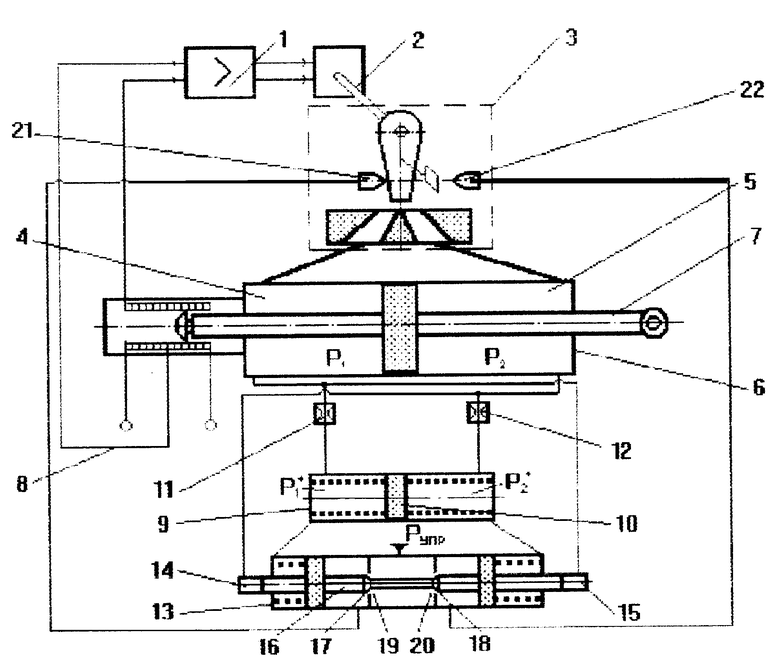
Электрогидравлический следящий привод, содержащий последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и гидроусилитель, связанный с электромеханическим преобразователем и с полостями гидроцилиндра, шток которого связан цепью отрицательной обратной связи по положению со сравнивающим усилителем, а также устройство дополнительной обратной связи по производной от перепада давлений, содержащее гидравлический конденсатор, выполненный в виде подпружиненного поршня, отличающийся тем, что обе полости гидравлического конденсатора через нерегулируемые дроссели связаны с основным гидроцилиндром и в то же время связаны с полостями дополнительного гидроцилиндра, торцевые камеры которого соединены с полостями основного гидроцилиндра, а шток выполнен в виде дроссельных игл, изменяющих площади регулируемых дросселей, к которым подключены сопла обратной связи, а полости регулируемых дросселей связаны с давлением управления.
| Чупраков Ю.И | |||
| Гидропривод и средства автоматики | |||
| - М.: Машиностроение, 1979, с.162, рис.112, с.109, рис.76 | |||
| Баженов А.И | |||
| и др | |||
| Проектирование следящих гидравлических приводов летательных аппаратов | |||
| - М.: Машиностроение, 1978, с.199, рис.4.2 | |||
| Электрогидравлическая следящая система | 1986 |
|
SU1418506A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1513245A1 |
| Электрогидравлическая следящая система | 1988 |
|
SU1560838A1 |
| Электрогидравлическая следящая система | 1971 |
|
SU445764A1 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
