Изобретение относится к линейным шаговым двигателям и может быть использовано при разработке двигателей с повышенной мощностью и увеличенным регулируемым диапазоном перемещений и тягового усилия.
Известен способ [1] относительного перемещения одного тела, имеющего магнитострикционные свойства, по внутренней поверхности второго тела, которое имеет несущий контакт со схватом с поверхностью, по которой перемещается первое тело.
Недостатком известного способа является недостаточный диапазон перемещения за один такт воздействия магнитного поля ( для магнитострикции он составляет 20-30 мкм/м) и недостаточное тяговое усилие, развиваемое при подаче управляющих воздействий на магнитострикционный элемент.
Также известен способ относительного перемещения по поверхности тел с магнитными свойствами [2] , каждое из которых имеет несущий контакт, схват которого с поверхностью осуществляется синхронно с воздействием на тело магнитного поля. Недостатком способа является недостаточный диапазон перемещений, недостаточное тяговое усилие и недостаточная гибкость управления диапазоном перемещений и тяговым усилием.
Целью изобретения является расширение области применения линейных шаговых двигателей, разработанных на основе данного способа, а именно, увеличение диапазона перемещений, повышение тягового усилия и гибкости управления диапазоном перемещения и тягового усилия за один такт воздействия магнитным полем.
Цель достигается тем, что в способе относительного перемещения по поверхности тел, имеющих магнитные свойства, каждое из которых имеет несущий контакт, схват которого с поверхностью обеспечивают синхронно с подачей на тела магнитного поля, каждой паре смежных тел задают определенную величину перемещения относительно друг друга и воздействуют попеременно на каждую смежную пару тел (группу тел) однополярными и разнополярными магнитными полями; при этом обеспечивают поочередный схват несущих контактов определенных тел (групп тел) с поверхностью.
Технический результат изобретения главным образом состоит в значительном увеличении диапазона перемещений по сравнению с прототипом - на порядок и более.
Наиболее просто предлагаемый способ реализуется с помощью электромагнитных катушек, в которые помещены тела с магнитными свойствами и несущими контактами, выполненные в виде электромагнитов. При этом поверхность, по которой перемещается двигатель, должна быть ферромагнитной.
Двигатель может содержать n тел (n ≥2), число которых определяется техническими требованиями к двигателю.
С увеличением количества тел возрастают тяговое усилие, диапазон перемещения и гибкость управления ими.
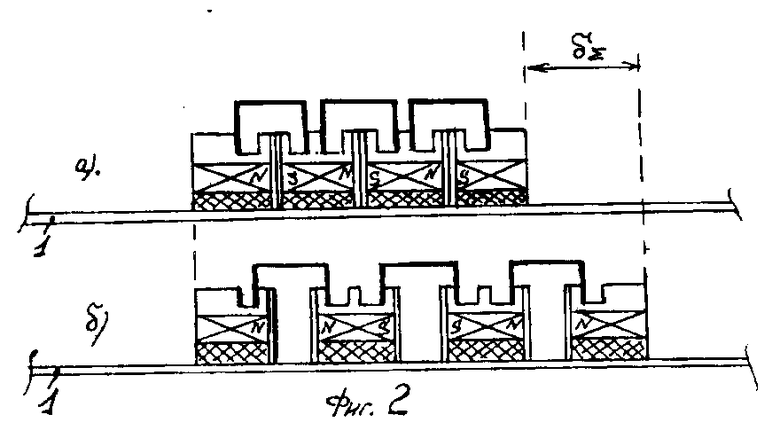
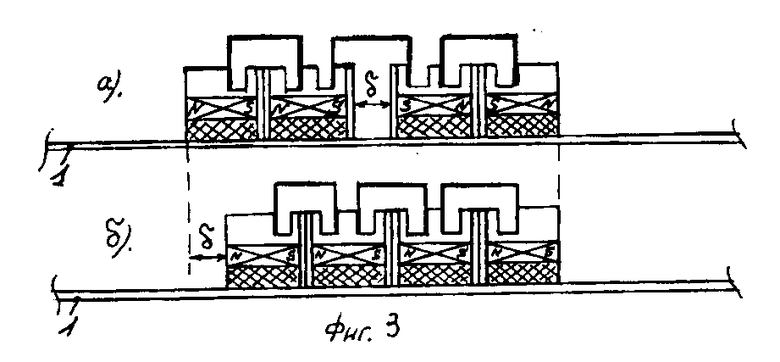
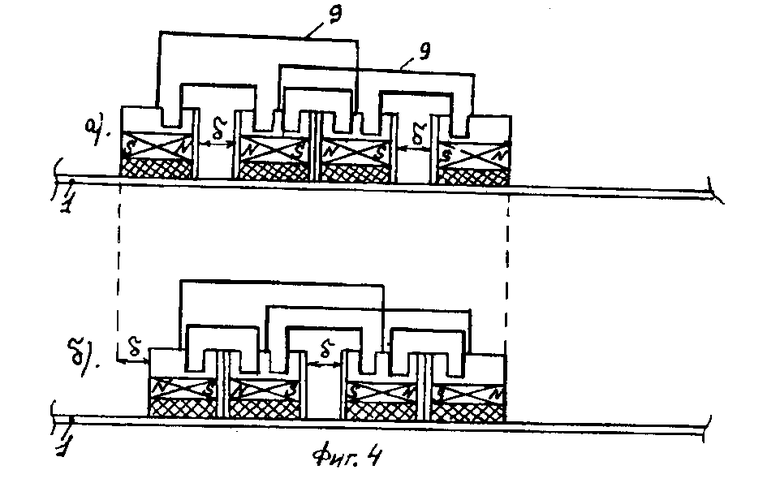
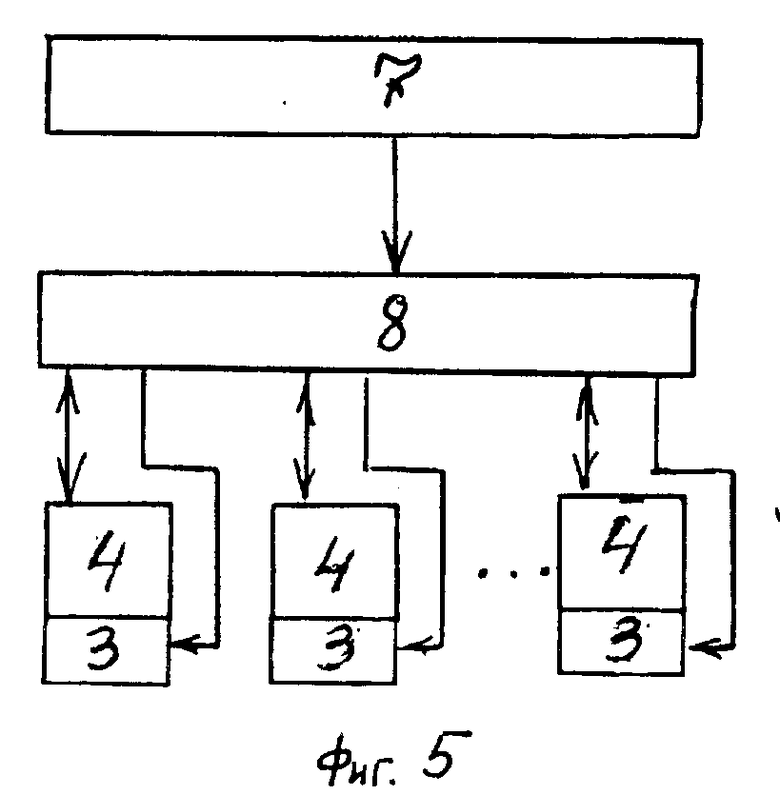
На фиг. 1 изображен линейный шаговый двигатель, состоящий из четырех тел; на фиг. 2 - механизм максимального перемещения крайних тел; на фиг. 3 - механизм управления тяговым усилием при перемещении тел; на фиг. 4 - конструкция двигателя с повышенным тяговым усилием и механизм его перемещения; на фиг. 5 - один из вариантов структурной схемы управления шаговым двигателем.
Двигатель (фиг. 1) перемещается по поверхности 1 и состоит из тел 2, имеющих магнитные свойства, каждое из тел имеет несущий контакт со схватом 3, электромагнитную катушку 4 (источник разнополярного магнитного поля), ограничители 5 максимального зазора между телами и пластины 6 с пазами для установки ограничителей 5. Ширина пазов для задания величины перемещения каждой пары от 0 до δ должна составлять 1/2δ.
Направляющие для придания движению определенного направления не показаны.
Схема управления шаговым двигателем (фиг.5) состоит из блока управления 7 и блока токовых ключей 8, которые соединены с электромагнитными катушками 4 и электромагнитом 3 несущих контактов тел.
Очередность подачи сигналов на электромагнитные катушки 4 и электромагниты 3 несущих контактов тел задается блоком управления 7.
Двигатель работает следующим образом.
В исходном состоянии все тела 2 раздвинуты между собой на величину зазора, определяемого длиной ограничителя 5 (фиг. 1). Для перемещения двигателя вправо подается сигнал схвата на электромагнит 3 крайнего правого тела 2 и электрический ток одинакового направления на электромагнитную катушку 4 каждого тела. Под действием разнополярных магнитных полей, возникающих при этом на торцах каждого тела, происходит притяжение тел друг к другу (фиг. 2а). Крайнее левое тело 2 при этом перемещается на величину 3δ .
В случае n тел суммарная величина перемещения определяется из выражения:
δΣ= (n-1)•δ,
где
n - количество тел;
δ - заданный зазор между телами.
Для дальнейшего перемещения тел выключают ток электромагнита крайнего правого тела 2, подают сигнал схвата электромагнита 3 крайнего левого тела 2 и изменяют направление тока в катушках четных тел 2. Полярность магнитных полей этих катушек изменится и тела 2 под действием однополярных полей на торцах тел 2 оттолкнутся друг от друга. При этом крайнее правое тело 2 переместится на величину 3δ вправо (фиг. 2б).
Для перемещения на минимальную величину δ осуществляют попеременный схват смежных тел 2, подавая по очереди ток на их электромагниты 3.
Для перемещения на величину 2δ осуществляют поочередный схват тел, расположенных через одно и т.д. Таким образом достигается гибкость управления величиной перемещения тел.
Для управления тяговым усилием двигателя объединяют тела в группы, например, по два тела (фиг. 3а), для чего подают на электромагнитные катушки 4 каждой группы тел 2 ток одного направления. Тела в каждой группе при этом притянутся друг к другу, а магнитное поле между группами возрастет пропорционально числу тел в группе. В данном случае в два раза. Затем осуществляют схват правой группы тел с поверхностью 1 путем подачи тока на электромагниты 3 правой группы тел, а на электромагнитные катушки 4 правой группы тел подают ток другого направления. Под действием разнополярных магнитных полей между группами левая группа тел переместится вправо на величину (фиг. 3б). С увеличением количества групп появляется возможность автоматически (программно) управлять величиной перемещения групп, т.е. появляется возможность гибкого управления как величиной перемещения двигателя, так и его тяговым усилием.
Для получения максимального тягового усилия жестко фиксируют между собой тела 2, расположенные через одно (фиг. 4), фиксаторами 9 и обеспечивают поочередный схват с поверхностью каждой группы, жестко фиксированных между собой тел 2.
Для перемещения групп тел 2, например, вправо подают сигналы схвата на несущие контакты всех четных тел (фиг. 4а) и соответствующие магнитные поля на группы тел (фиг. 4б). При этом нечетные тела притянутся к четным, и переместятся вправо. Тяговое усилие при этом будет максимальным за счет суммирования тягового усилия каждого четного и нечетного тела, обеспечивающегося жесткими фиксаторами 9. С увеличением числа жестко связанных тел в каждой группе тяговое усилие пропорционально возрастет. Суммарное тяговое усилие при попарном притяжении тел (фиг. 4) выше, чем при притяжении групп тел между собой (фиг.3), за счет меньших потерь магнитного поля на рассеивание.
Таким образом, описанный способ относительного перемещения по поверхности тел, имеющих магнитные свойства, позволяет разрабатывать гибкие в управлении шаговые двигатели с повышенным тяговым усилием, которые могут найти применение в разных областях науки и техники.
В соответствии со способом был изготовлен макетный двигатель, который показал работоспособность. Шаг перемещения по сравнению с прототипом возрос на несколько порядков, и в зависимости от мощности электромагнита и выбранной величины перемещения (зазора между телами) может составлять 2-20 мм и более.
Использование: линейные шаговые двигатели и может быть использовано при разработке двигателей с повышенной мощностью и увеличенным регулируемым диапазоном перемещений и тягового усилия. Сущность изобретения: способ относительного перемещения по поверхности тел, имеющих магнитные свойства, каждое из которых имеет несущий контакт, схват которого с поверхностью обеспечивают синхронно с подачей на тела магнитного поля, в котором каждой паре смежных тел задают определенную величину перемещения относительно друг друга и воздействуют попеременно на каждую смежную пару или группу тел однополярными и разнополярными магнитными полями. При этом обеспечивают поочередный схват несущих контактов тел или групп тел с поверхностью. Для минимального перемещения тел или групп тел обеспечивают поочередный схват смежных тел или групп тел. Для максимального перемещения обеспечивают поочередный схват с поверхностью крайних тел или групп тел. Для управления тяговым усилием объединяют в группы определенное количество тел путем подачи на каждую смежную пару тел в группе разнополярного магнитного поля. Для обеспечения максимального тягового усилия жестко фиксируют между собой тела, расположенные через одно и обеспечивают поочередный схват с поверхностью каждой группы, жестко фиксированных между собой тел. 4 з.п. ф-лы, 5 ил.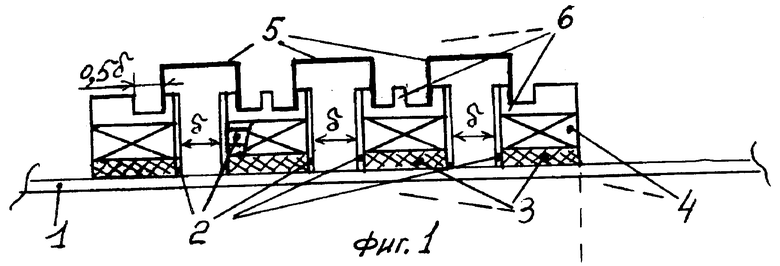
| SU, патент, 1828564, H 02 N 2/20, 1993 | |||
| RU, патент, 2007018, H 02 N 2/00, 1994. |
