Изобретение относится к области медицины и медицинской техники и может быть использовано для неинвазивной дистанционной диагностики патологических и предпатологических состояний, в качестве средства предварительной диагностики, для топологической диагностики заболеваний органов в динамике, а также для контроля динамики процесса лечения.
Известен способ дистанционного мониторинга внутренних физиологических процессов человека за счет того, что измеряют электромагнитные сигналы, исходящие от тела человека в динамике в диапазоне 0,3-0,4 ...40 Гц и разделяют сигналы на ЭКГ, ЭЭГ, ЭМГ, ЭОГ и респираторные волны за счет того, что располагают на расстоянии до 12 фут. от тела человека сверхпроводящую переохлажденную сложную антенну, температуру которой поддерживают на уровне около 3,7 K, производят оптимальную фильтрацию принятого сигнала в результате чего максимизируют отношение сигнал/шум, преобразуют полученный сигнал в цифровую форму, передают в цифровой процессор, где производят деление полученного сигнала на составляющие, характеризующие физиологические процессы в организме, а именно ЭКГ, ЭЭГ, ЭМГ, ЭОГ и волны дыхания и отображают их на дисплее [1].
Недостатками известного способа являются ограниченные функциональные возможности при диагностике поскольку он позволяют наблюдать лишь мгновенные значения быстротекущих электрофизиологических процессор организма и не позволяет оценить характеристики и состояние квазипостоянной полевой электромагнитной оболочки вокруг организма, а также не позволяет производить топологическую диагностику органов и тканей по причине регистрации лишь общей мгновенной амплитудной интенсивности электромагнитного поля пациента.
Наиболее близким к предлагаемому является известный способ электрического картирования, заключающийся в том, что над поверхностью биообъекта измеряют пространственное распределение электрического заряда, а измерения осуществляют за счет того, что на расстоянии над биообъектом располагают приемный электрод и измеряют его заряд. Кроме того, по другую сторону биообъекта симметрично первому приемному электроду располагают на расстоянии над биообъектом второй приемный электрод и образуют электроемкость с первым приемным электродом, а биообъект помещают в межэлектродное пространство, после чего перед измерением заряда первого приемного электрода производят заряд биообъекта высокочастотным электрическим полем [2].
Недостатками известного способа являются низкие функциональные и диагностические возможности, а также низкая точность диагностики. Это объясняется тем, что известный способ позволяет получать карты только быстропротекающих процессов, а именно неощутимой перспирации, отражающей терморегуляционные реакции организма, а также механических вибраций заряженной поверхности тела, связанных с механическим функционированием внутренних органов. Ввиду быстрой динамики этих процессов связь ее с заболеванием является чрезвычайной сложной по причине высокой нестационарности, стохастичности и больших индивидуальных разбросов. Кроме того, заключение о каком-либо патологическом отклонении выносится относительно состояния, развившегося у больного в течение длительного периода времени, исчисляемого месяцами и более, т. е. наблюдаемость которого соразмерна этому периоду. Такая явная несоразмерность временной организации развития заболевания и информативных признаков, принятых в качестве диагностических в известном способе, в значительной мере осложняет постановку диагноза и снижает точность диагностирования, а, кроме того, не позволяет выявить скрытые причины заболевания, позволяя судить лишь о внешних его проявлениях. Известный способ позволяет обойтись без криогенной техники, что делает его относительно простым и доступным, однако в то же время он требует предварительного заряда кожных покровов внешним достаточно сильным высокочастотным электрическим полем, создающим на поверхности тела регулярный электрический заряд, что делает известный способ активным, использующим грубые внешние воздействия на человека, отрицательно сказывающиеся на его биоэнергетике и вносящие искажения в измерение.
Известен криогенный физиограф, содержащий приемную антенну треугольной формы, состоящую из трех одинаковых металлических сверхпроводящих переохлажденных пластин и трех одинаковых переохлажденных аналоговых блоков, каждый из которых соединен с соответствующей пластиной; аналоговый блок, содержащий схему шумопонижения, вход которой является входом аналогового блока и соединен с выходами трех переохлажденных аналоговых блоков антенны, волоконно-оптическую линию связи, вход которой соединен с выходом схемы шумопонижения, фильтр нижних частот, вход которого соединен с выходом волоконно-оптической линии связи, а выход является выходом аналогового блока; аналого-цифровой преобразователь, вход которого соединен с выходом аналогового блока; четырехканальный блок памяти, входы которого соединены с выходами аналого-цифрового преобразователя; четыре Фурье-процессора и четыре коррелятора, входы которых соединены с соответствующими выходами четырех каналов блока памяти; мини-компьютер с дисплеем, входы которого соединены с выходами корреляторов и Фурье-процессоров, а четыре выхода соединены через четыре цифроаналоговых преобразователя со входами четырехканального самописца [3].
Недостатками известного устройства являются высокая степень сложности и низкие эксплуатационные характеристики, в том числе по причине применения криогенной техники, а также низкие функциональные и диагностические возможности ввиду невозможности оценки стационарных состояний организма, невозможности проведения топологичнской диагностики, а также по причине контроля лишь мгновенных значений физиологических параметров, имеющих очень сложную и неоднозначную связь с общим состоянием пациента.
Наиболее близким к предлагаемому является устройство для измерения электрического заряда биообъекта, содержащее измерительный приемный электрод и регистрирующий прибор, вход которого электрически соединен с приемным электродом. Кроме того, устройство содержит заземленный экран, выполненный в виде двух, соединенных телескопически, полых цилиндров, при этом внутренний цилиндр выполнен с заглушенным торцом, а внешний снабжен плоской кольцеобразной пятой, закрепленной на его торце, противоположном заглушенному торцу внутреннего цилиндра, в полости которого размещен измерительный приемный электрод и закреплен на фиксированном расстоянии от открытого торца [4].
Недостатками известного устройства являются низкие функциональные и диагностические возможности ввиду невозможности оценки конфигурации поля, низкой точности и помехозащищенности по причине измерений поверхностного статического поля, обладающего высокой вариабельностью и зависимостью от внешних условий, а потому низкой информативностью, особенно, о состоянии внутренних органов.
Целью изобретения является расширение функциональных и диагностических возможностей за счет осуществления возможности оценки топологии эквипотенциальных поверхностей электромагнитного поля биообъекта по параметру фазового сдвига, проведения топологической диагностики органов и тканей, повышение точности диагностики и помехоустойчивости за счет применения сверхдлинноволнового диапазона и фазочастотного анализа, а также за счет использования шума как полезного сигнала.
Для достижения поставленной цели в известный способ электрического картирования, заключающийся в том, что над поверхностью биообъекта измеряют пространственное распределение электрического заряда, измерения осуществляют за счет того, что на расстоянии над биообъектом располагают приемный электрод и измеряют его заряд, дополнительно в диапазоне сверхдлинных радиоволн по шумовой компоненте электрического заряда приемного электрода за счет того, что принимают сигнал шума с приемного электрода, выделяют частотную составляющую на фиксированной частоте из шумового сигнала флуктаций заряда приемного электрода, а в качестве параметра оценки поля используют величину фазового сдвига между выделенной частотной составляющей и опорным сигналом той же частоты, а по конфигурации, расположению и форме относительно биообъекта кривых параметра оценки поля судят о наличии, степени и локализации патологии. Кроме того, измерения проводят по сечениям пространства вокруг биообъекта, причем в каждом сечении строят кривую эквипотенциальной поверхности измеряемого параметра поля. Кроме того, приемный электрод перемещают параллельно поверхности биообъекта на одинаковом расстоянии от него, при этом перед началом перемещения выравнивают фазу опорного и принимаемого сигнала подстройкой опорного сигнала, а в процессе перемещения фиксируют области на биообъекте, над которыми наблюдается изменение фазы, по которым судят о локализации патологических процессов и изменений. Кроме того, кривую эквипотенциальной поверхности оценки поля в каждом сечении биообъекта строят за счет того, что каждый раз выравнивают помеховый фон благодаря тому, что устанавливают приемный электрод на одинаковом расстоянии от биообъекта, подстройкой фазы опорного сигнала выравнивают фазу опорного и принимаемого сигналов, затем перемещают с постоянной скоростью приемный электрод вдоль прямой по направлению к биообъекту и определяют расстояние от приемного электрода до биообъекта, начиная с которого регистрируют ненулевую величину или превышение над наперед заданной постоянной величиной разности фаз между принимаемым и опорным сигналами. Кроме того, каждый раз изменяют частоту опорного сигнала в пределах диапазона сверхдлинных радиоволн и для каждой частоты строят соответствующую кривую эквипотенциальной поверхности измеряемого параметра поля. Кроме того, отклонение фазы принимаемого сигнала от опорного регистрируют за счет того, что определяют величину интеграла разности фаз принимаемого и опорного сигналов, по его наличию и изменению судят об отклонении фазы принимаемого сигнала от фазы опорного сигнала, а по скорости нарастания - о величине разности фаз, и каждый раз перед новым измерением устанавливают нулевые начальные условия интегрирования. Кроме того, кривую эквипотенциальной поверхности поля в сечении строят за счет того, что осуществляют автоматическое перемещение приемного электрода непосредственно по кривой эквипотенциальной поверхности вокруг биообъекта в пределах каждого сечения за счет того, что производят движение приемного электрода по окружности вокруг биообъекта в плоскости сечения, определяют величину отклонения разности фаз опорного и принимаемого сигналов от наперед заданного значения, управляют радиальным перемещением приемного электрода по отклонению разности фаз от заданного значения и определяют расстояние и конфигурацию эквипотенциальной кривой до биообъекта. Кроме того, по полученным сечениям биоэлектромагнитного поля производят реконструкцию трехмерных эквипотенциальных поверхностей поля для каждого значения частоты. Кроме того, смену сечений биоэлектромагнитного поля биообъекта производят автоматически по заданной программе так, что осуществляют непрерывное сканирование приемным электродом эквипотенциальной поверхности параметра поля биообъекта, например по спиральной траектории. Кроме того, одновременно с измерением поля определяют конфигурацию поверхности биообъекта или его основные пропорции и совмещают их в одном масштабе с получаемыми эквипотенциальными поверхностями поля. Кроме того, при определении конфигурации эквипотенциальных поверхностей по уменьшению из размеров судят о понижении общих защитных сил организма, а по локализации впадин и локальных выпуклостей эквипотенциальной поверхности судят о локализации патологических морфофункциональных изменений в соответствующих местах тканей и органов биообъекта. Кроме того, сечения эквипотенциальной поверхности располагают так, чтобы они проходили через центры вегетативных нервных сплетений и подкорковых образований, при этом по локализации деформаций эквипотенциальной поверхности в соответствующих центрах судят о патологии органов, управляемых этими центрами. Кроме того, измерения проводят периодически в процессе курса медикаментозной, физио-, рефлексо-, мануальной или других видов терапии и образуют обратную связь по параметрам терапевтического воздействия за счет того, что по динамике изменения конфигурации эквипотенциальных поверхностей в процессе терапии судят о ее эффективности и точности и при необходимости производят коррекцию схем, доз и видов лечения.
Для достижения поставленной цели в известном устройстве для измерения электрического заряда биообъекта, содержащем приемный электрод, соединенный со входом измерительного блока, выход которого соединен со входом блока индикации, дополнительно измерительный блок содержит последовательно соединенные предварительный усилитель, импульсный фильтр, усилитель переменного тока, фазовый детектор, сглаживающий фильтр нижних частот и усилитель постоянного тока, а также содержит генератор сигналов опорной частоты и фазы, выход которого соединен со вторым входом импульсного фильтра и вторым входом фазового детектора, блок компенсации помехового фона, выход которого соединен со вторым входом усилителя постоянного тока, выход которого является выходом измерительного блока, вход предварительного усилителя является входом измерительного блока. Кроме того, блок индикации содержит интегратор, вход которого является входом блока индикации, выход интегратора соединен со входом индикаторного элемента, вход сброса интегратора соединен с выходом элемента сброса интегратора. Кроме того, блок индикации содержит нелинейный элемент типа "зона нечувствительности" с переменной величиной зоны, вход которого является входом блока индикации, элемент настройки зоны нечувствительности, выход которого соединен с управляющим входом нелинейного элемента, интегратор, вход которого соединен с выходом нелинейного элемента, элемент сброса интегратора, выход которого соединен с входом сброса интегратора, индикаторный элемент, вход которого соединен с выходом интегратора. Кроме того, в него введен дальномер, например оптический, инфракрасный или ультразвуковой, вход которого расположен рядом с приемным электродом на одном с ним уровне и расположен в направлении, перпендикулярном плоскости электрода, а в блок индикации введен второй индикаторный элемент, вход которого является вторым входом блока индикации и соединен с выходом дальномера. Кроме того, в него введены три независимых электромеханических привода приемного электрода, соединенные с ним, программно-управляющий блок, три выхода которого соединены со входами трех приводов, четвертый выход программно-управляющего блока соединен с управляющим входом измерительного блока, выход которого соединен с первым входом программно-управляющего блока, введен управляющий вход в блок компенсации помехового фона, который является управляющим входом измерительного блока. Кроме того, в него введен блок датчиков положения пациента и его пропорций, выход блока датчиков соединен со вторым входом программно-управляющего блока. Кроме того, в него введен дальномер, вход которого расположен на одном уровне с приемным электродом, а выход соединен с вторым входом программно-управляющего блока. Кроме того, в него введен четвертый электромеханический привод перемещения приемного электрода, вход которого соединен с пятым выходом программно-управляющего блока, а выход соединен с приемным электродом. Кроме того, электромеханические приводы перемещения приемного электрода выполнены в виде шаговых электрических двигателей. Кроме того, программно-управляющий блок содержит микроЭВМ с клавиатурой и дисплеем, соединенными с входами микроЭВМ, два аналого-цифровых и цифроаналоговый преобразователи, соединенные с параллельными портами ввода-вывода микроЭВМ, входы аналого-цифровых преобразователей являются первым и вторым входами программно-управляющего блока, выход цифроаналогового преобразователя является четвертым выходом программно-управляющего блока, первый, второй, третий и пятый входы программно-управляющего блока являются последовательными портами ввода-вывода микроЭВМ.
На фиг. 1 изображена схема выполнения способа оценки электромагнитного поля биобъектов.
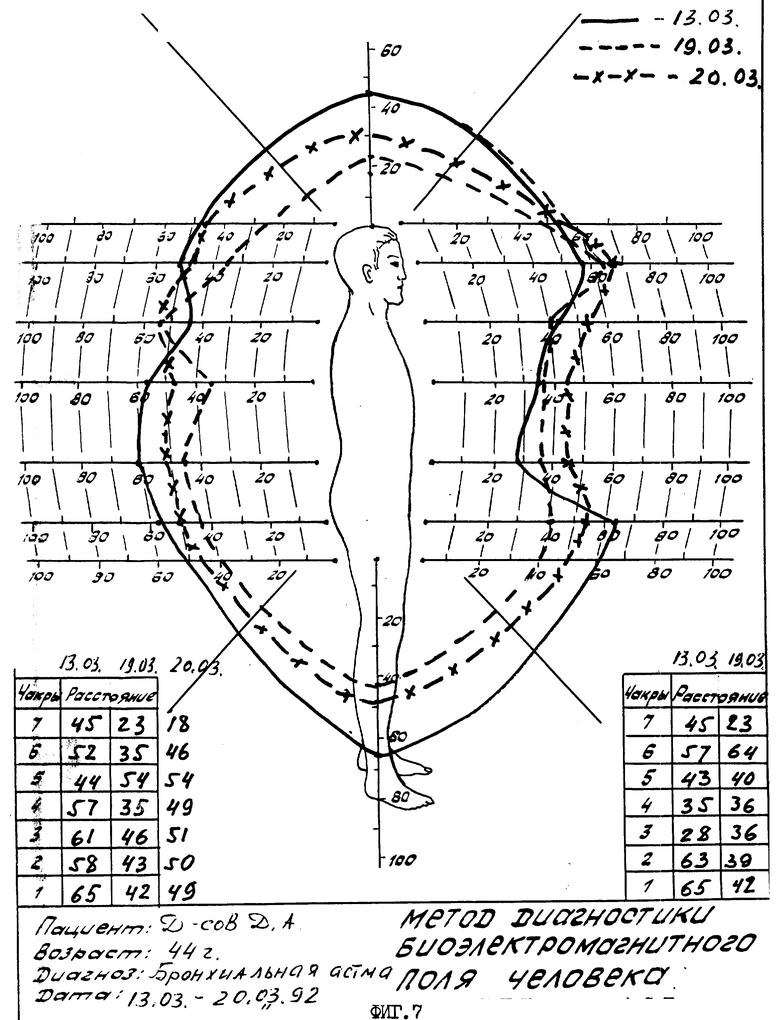
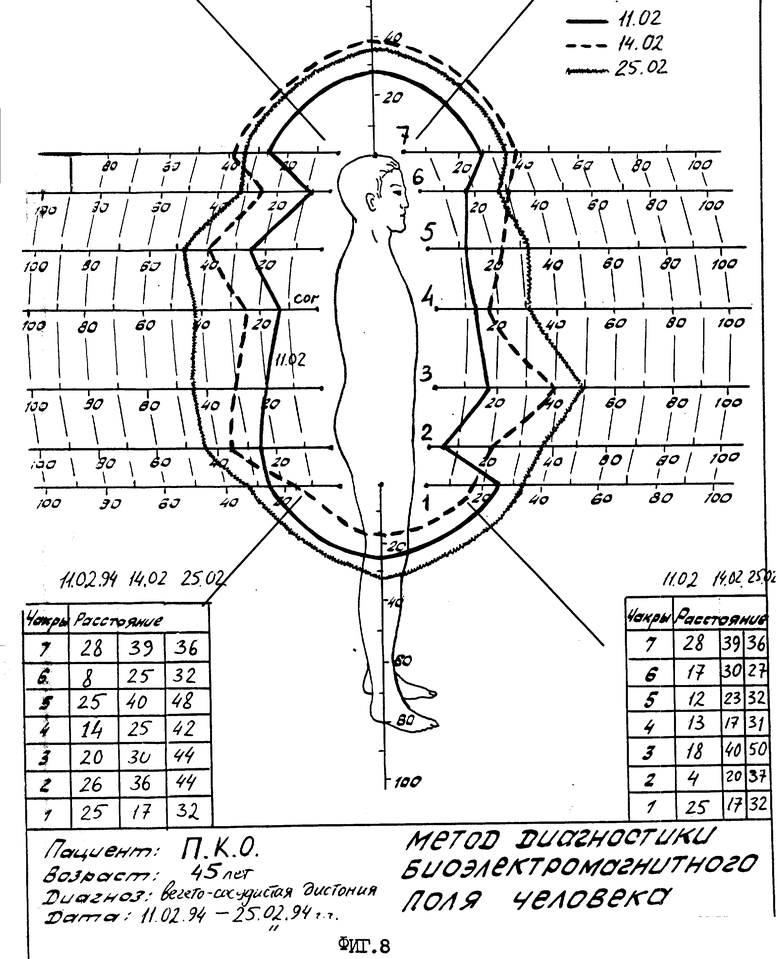
На фиг. 2-8 изображены эквипотенциальные фазовые поверхности конкретных пациентов.
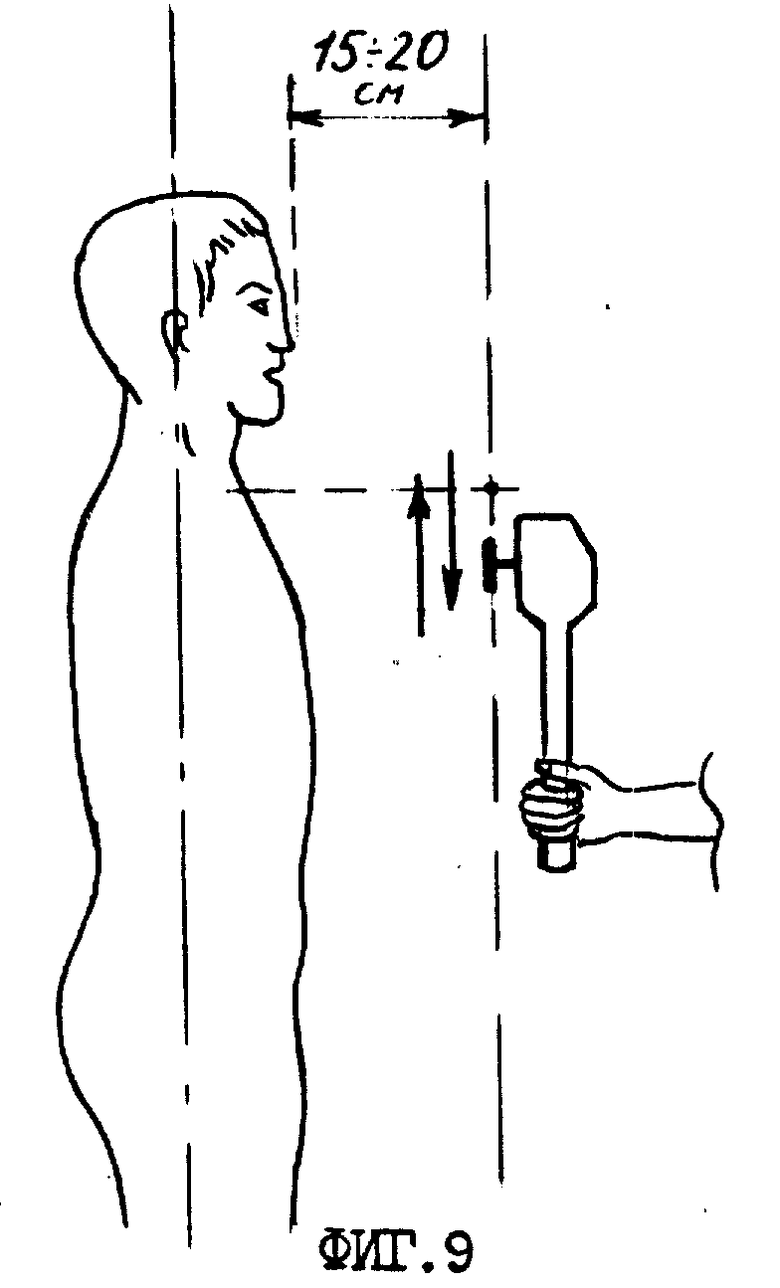
На фиг. 9 изображена схема выполнения способа при экспресс-диагностике.
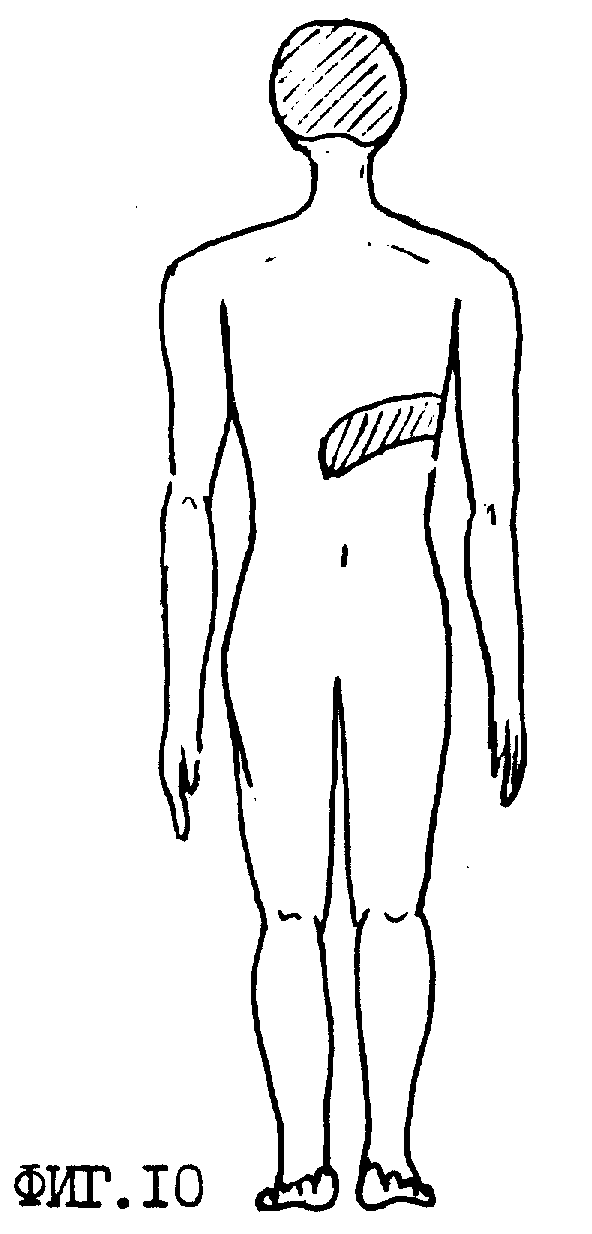
На фиг. 10 изображена обнаруженная локализация искажений фазовой поверхности для конкретного пациента при экспресс-диагностике.
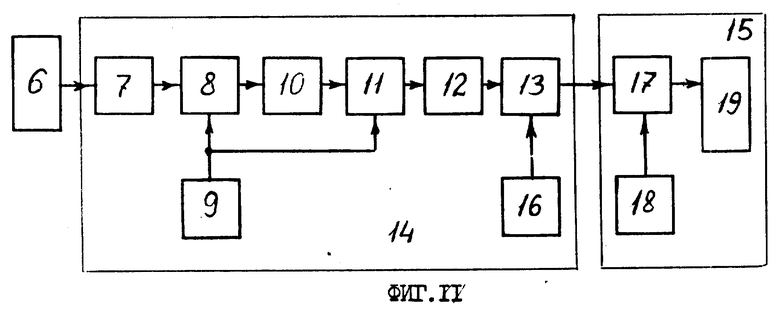
На фиг. 11 изображена функциональная схема устройства для оценки электромагнитного поля биообъектов.
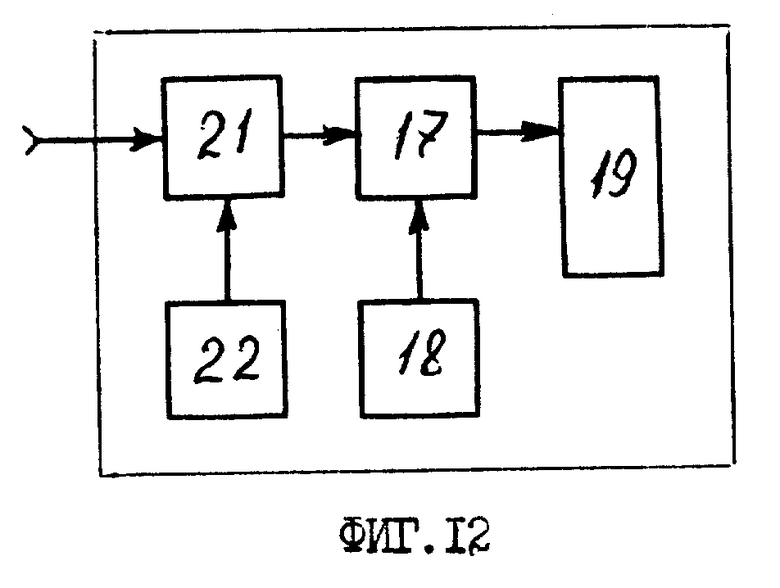
На фиг. 12 изображена функциональная схема блока индикации устройства.
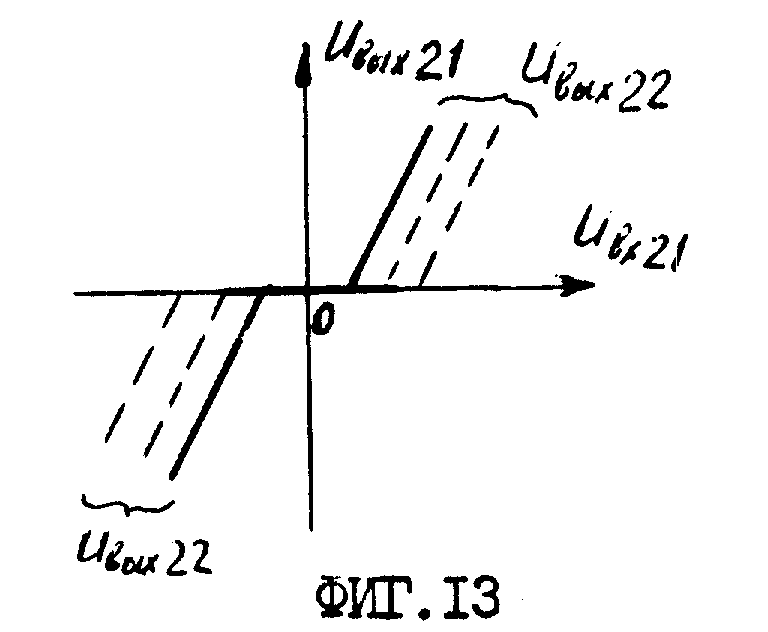
На фиг. 13 изображена характеристика "вход-выход" нелинейного элемента и ее регулирование.
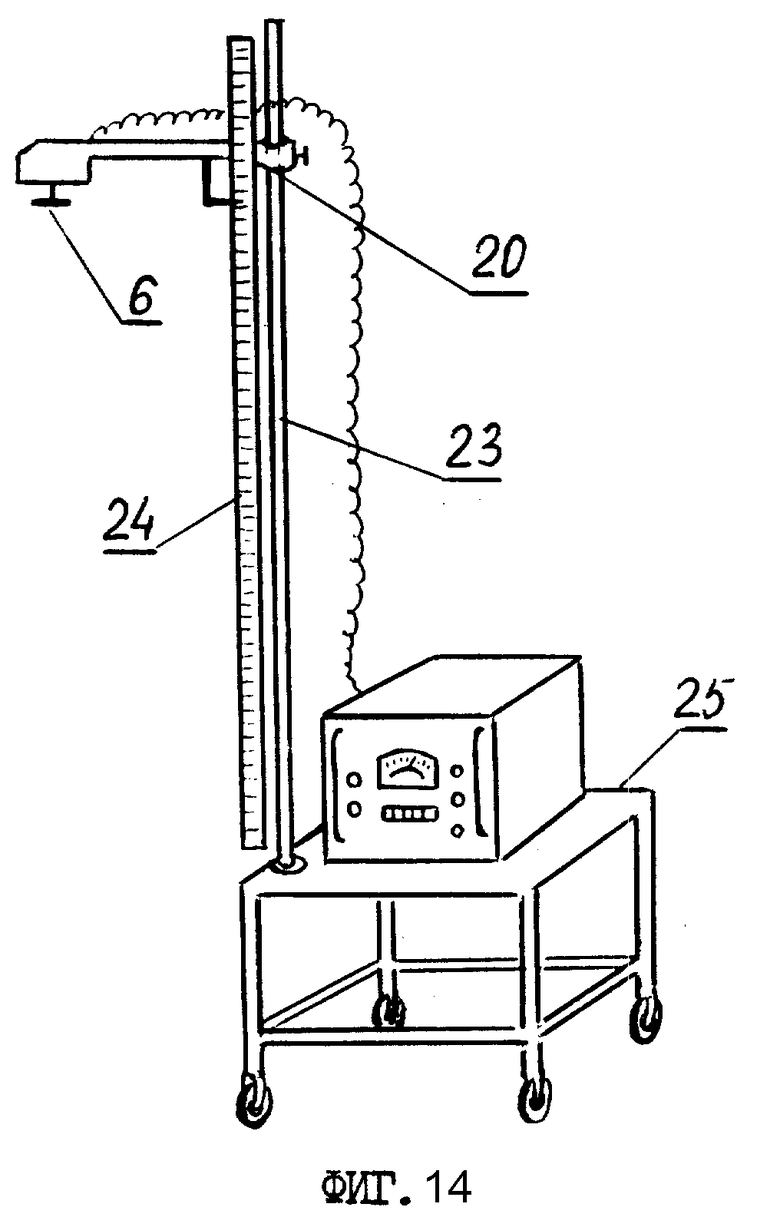
На фиг. 14 изображена схема конструктивного выполнения устройства с ручным измерением.
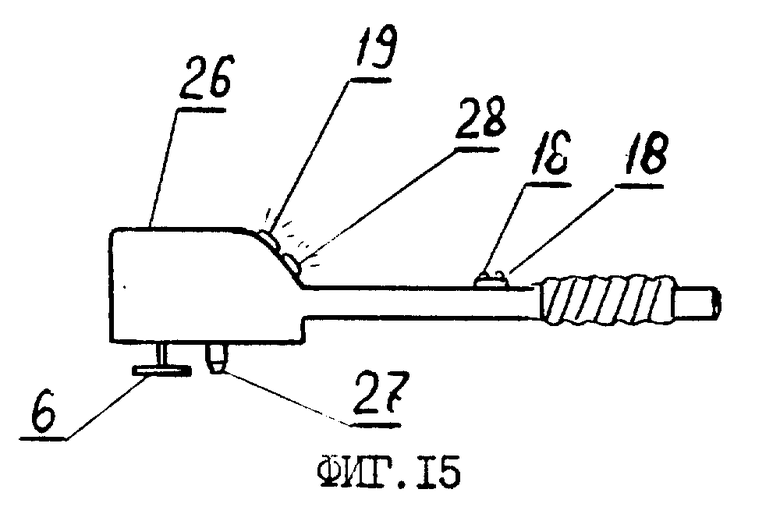
На фиг. 15 изображена схема конструктивного выполнения устройства в автономном варианте, в том числе для экспресс-диагностики.
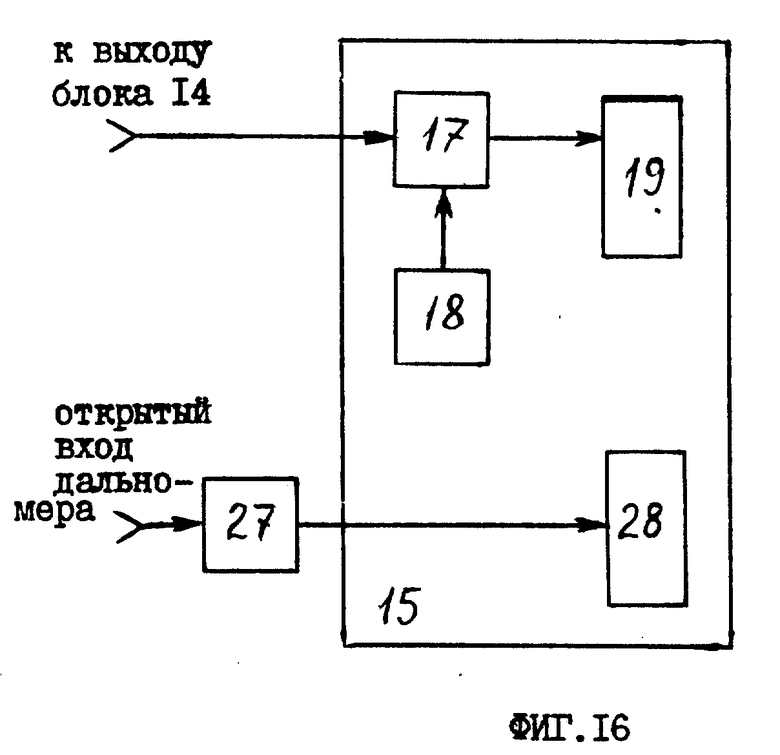
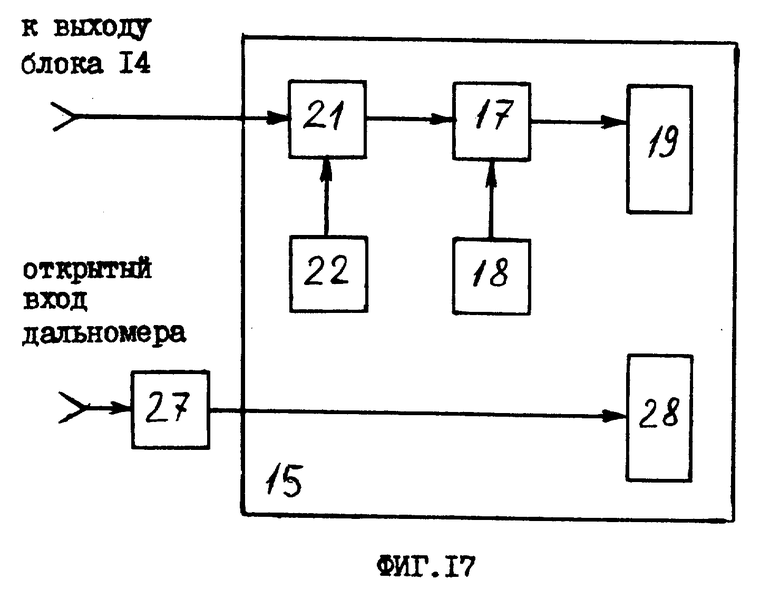
На фиг. 16-17 изображена функциональная схема вариантов индикаторного блока с дальномером.
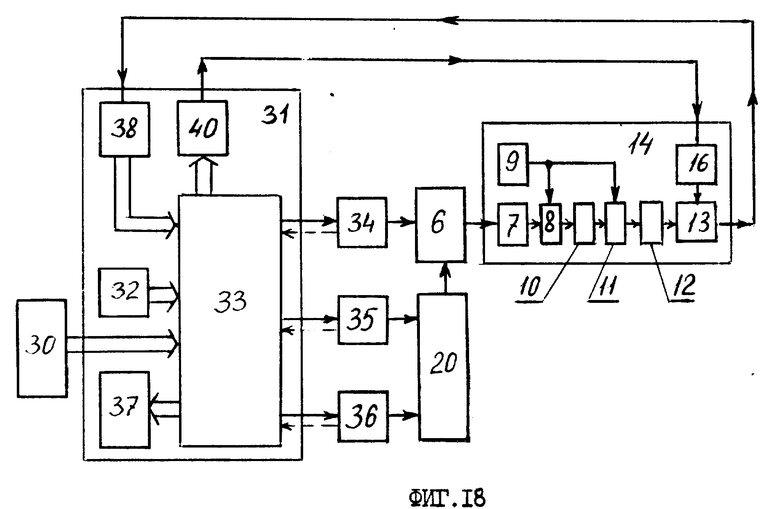
На фиг. 18 изображена функциональная схема автоматизированного варианта устройства.
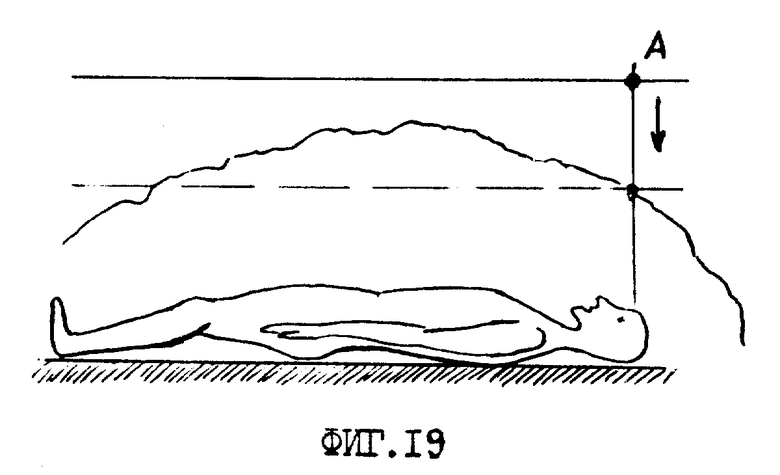
На фиг. 19 показана схема компенсации помехового фона.
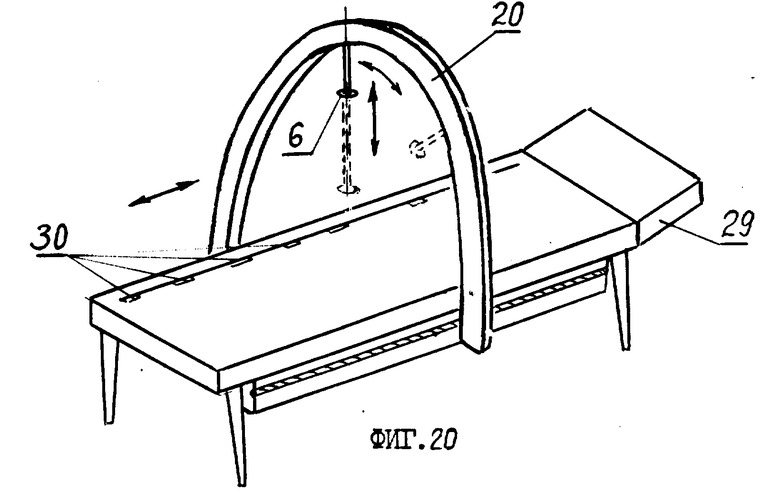
На фиг. 20 изображена схема конструктивного выполнения автоматизированного варианта устройства.
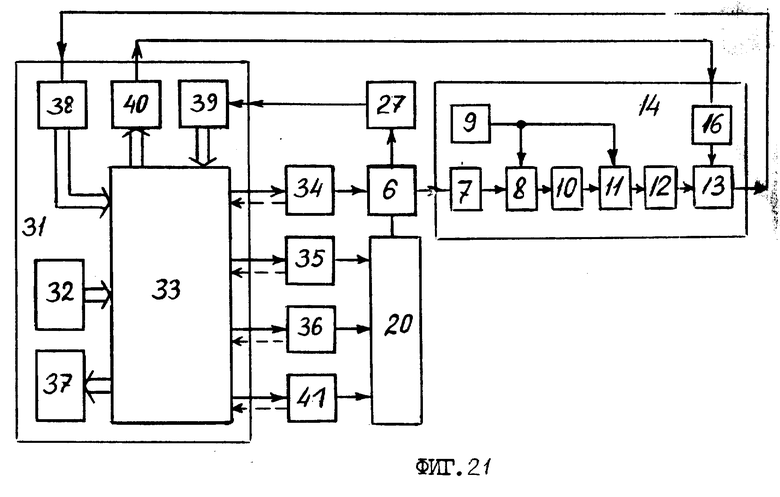
На фиг. 21 изображена функциональная схема автоматизированного варианта устройства с дополнительной степенью свободы приемного электрода.
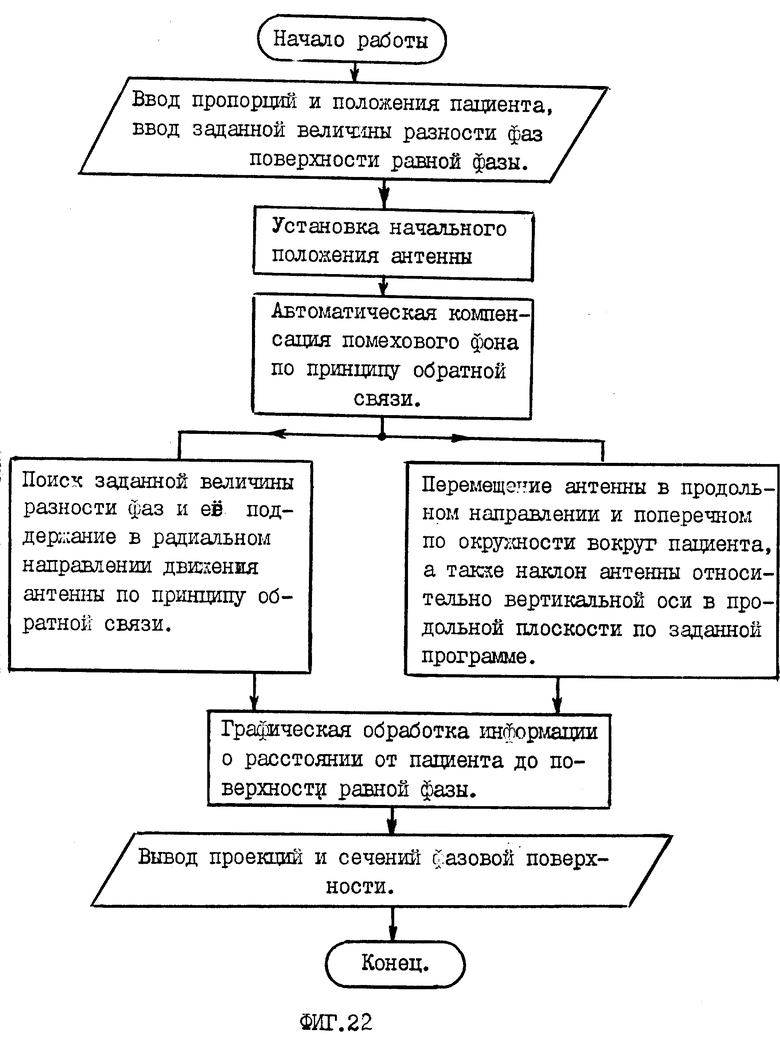
На фиг. 22 приведена блок-схема алгоритма программы мироЭВМ автоматизированного варианта устройства.
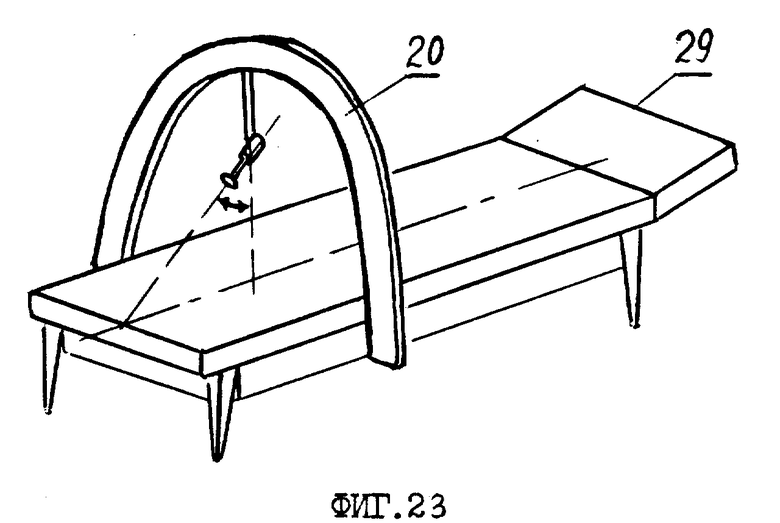
На фиг. 23 показана схема конструктивного выполнения автоматизированного варианта устройства с дополнительной степенью свободы приемного электрода.
Способ оценки электромагнитного поля биообъекта основан на топологическом анализе эквипотенциальных поверхностей стационарного электромагнитного поля, окружающего биообъект. В качестве параметра, по которому строятся эквипотенциальные поверхности, используется, в отличие от всех известных литературных источников, величина фазового сдвига между опорным сигналом фиксированной частоты и гармонической составляющей принимаемого шумового сигнала. Таким образом, шумовой сигнал, фиксируемый около биообъекта, является полезным, а использование в качестве рабочего диапазона сверхдлинных радиоволн от 1 до 10 кГц позволяет отстроиться от быстропротекающих ритмико-физиологических процессов, (таких, как ЭКГ, ЭЭГ, КРГ, ЭМГ, циркадная ритмика и т.д. ) и судить о медленно меняющемся стационарном поле, несущем отпечаток общего функционального и морфологического состояния органов, тканей и систем организма, а также реагирующем на медикаментозные и иные виды лечебных воздействий. При этом топологический анализ конфигурации эквипотенциальных поверхностей поля позволяет оценить как общий потенциал защитных сил организма по относительным размерам эквипотенциальных поверхностей, так и локализацию патологических очагов по расположению впадин и выпуклостей на картине эквипотенциальной поверхности относительно тела биообъекта.
В связи с тем, что изменения фазы принимаемых сигналов представляют собой относительно малые величины, для повышения общей чувствительности и помехозащищенности предлагаемого способа контроль за отклонением фазы принимаемого сигнала от опорного производят за счет того, что регистрируют сигнал, равный интегралу разности фаз принимаемого и опорного сигналов. При этом достаточно даже незначительного отклонения фазы, чтобы сигнал интегратора разности фаз начал непрерывно возрастать и за конечный промежуток времени достиг максимума, что легко регистрируется обычными измерительными приборами. Оценка скорости возрастания интеграла разности фаз при постоянной скорости перемещения приемной антенны (приемного электрода) или оценка его величины за фиксированный промежуток времени позволяет судить о величине фазового скачка. Чтобы зафиксировать следующий скачок фазы над другим участком тела пациента, предварительно устанавливают нулевые начальные условия интегрирования.
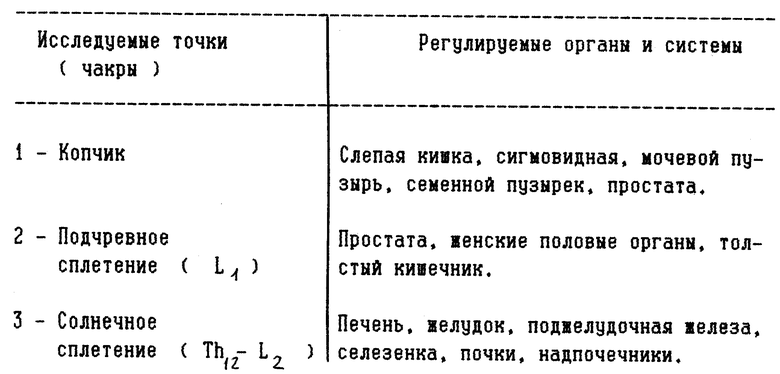
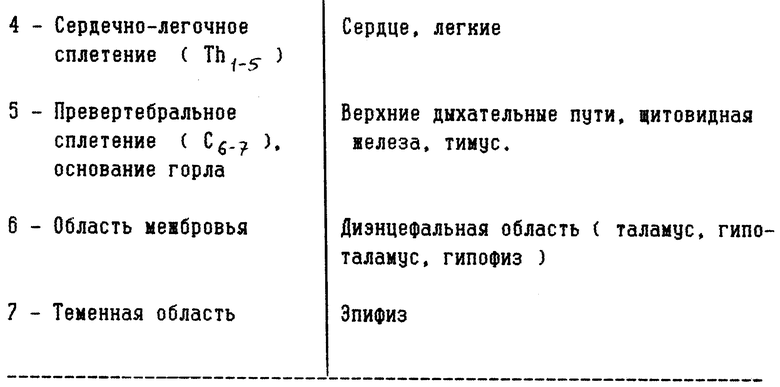
Способ оценки электромагнитного поля биообъекта осуществляют следующим образом. Пациента 1 (фиг. 1) располагают в положении лежа на катушке 2. Для сокращения процедуры неавтоматизированной диагностики оценка электромагнитного поля человека производилась при пространственной ориентации приемного электрода (антенны) 3 над каждой из семи точек основного энергетического канала человека, расположенных вдоль позвоночника. Точки 4 спереди и сзади поверхности тела пациента 1 в основном соответствовали проекции на кожный покров вегетативных нервных сплетений и подкорковых образований. Принятые точки измерений (условные и по литературным данным о вегетологии [5]) распределялись следующим образом (см. таблицу).
Предполагалось, что измерение электромагнитного поля над соответствующими вегетативными сплетениями позволит интерпретировать функциональные или органические изменения в органах и системах, соответственно регулирующихся этими сплетениями.
Антенну 3 располагали над выбранной точкой 4 на постоянной (для всех точек 4) высоте 1,5 мм и осуществляли компенсацию помехового фона подгонкой величины фазы сигнала эталонного генератора под величину фазы гармонической составляющей принимаемого антенной 3 сигнала шумового фона флуктуаций заряда антенной емкости. Таким образом, на расстоянии 1,5 м производили установку нулевой разности фаз принимаемого и опорного сигналов. Далее, осуществляли перемещение антенны 3 с постоянной скоростью вдоль прямой, соединяющей антенну 3 и выбранную точку 4 пациента 1 по направлению к пациенту 1, с одновременным наблюдением величины разности фаз или для повышения чувствительности ее интеграла.
Перемещение антенны 3 вдоль прямой осуществляют, например, по штанге (фиг. 1), либо вручную при экспресс-диагностике, удерживая антенну с прибором в руке, либо автоматически при помощи сервомеханизма.
В момент отличия от нуля разности фаз (соответственно резкого изменения интеграла разности фаз) или превышения им наперед заданного порогового значения производили измерение расстояния до выбранной точки 4 в соответствующем месте на кожном покрове пациента. Эти расстояния над каждой точкой использовали для построения кривой эквипотенциальной поверхности равных фаз в заданном сочетании (фиг. 2 - 8). Построение эквипотенциальной кривой в необходимом сечении можно производить по большому количеству точек с любой наперед заданной степенью дискретности, что целесообразно делать при автоматизации измерений и построении топограмм. При использовании следящей системы возможно непрерывное сканирование эквипотенциальной кривой с управлением перемещением антенны 3 по отклонению фазы принимаемого сигнала от фазы опорного сигнала. При этом, согласно полученным экспериментальным данным, проекции дефектов (впадин или выпучиваний) эквипотенциальной поверхности на кожные покровы, как правило, совпадали с локализацией патологических очагов (фиг. 2-8), что подтверждалось известными клиническими методами. Измерение расстояний от кожных покровов до положения антенны 3, в котором регистрируется ненулевая либо наперед заданная величина разности фаз, в упрощенном случае оценки поля по семи основным точкам производилось по шкале расстояний 5, вдоль которой перемещали антенну 3. При этом перед измерением в каждой точке 4 осуществляли позиционирование антенны 3 до соприкосновения с данной точкой 4 или на расстоянии 2-3 мм от нее и отметкой начального расстояния по шкале 5, которое вычитали из отметки расстояния по шкале 5, на котором регистрировали фазовый сдвиг.
В случае автоматизации операций способа при увеличении количества точек измерения, определение расстояний может производиться известными радиотехническими методами с помощью дальномеров (например, с помощью радиоволн, оптического, инфракрасного излучения или ультразвука и т.п.) или с помощью контактных датчиков и шаговых электродвигателей, которые позволяют осуществить непрерывное сканирование топограммы поля и вывод ее на печать и экран дисплея.
В случае проведения экспресс-диагностики (возможно, в походных или полевых условиях, при спасательных работах, в чрезвычайных ситуациях и т.д.) приемный электрод - антенну 3 располагают параллельно какому-либо участку тела пациента 1 (фиг. 9) на расстоянии 0,2 - 0,3 м и производят выравнивание помехового фона установкой фазы опорного сигнала, равной фазе принимаемого, и установку нулевых начальных условий интегрирования и затем перемещают приемную антенну 3 параллельно поверхности тела на этом же расстоянии от него. При этом фиксируют на поверхности тела места, над которыми начинается резкое изменение сигнала интеграла разности фаз принимаемого и опорного сигналов. После фиксации фазового скачка каждый раз снова устанавливают нулевые начальные условия интегрирования и продолжают движение антенны 3 до нового резкого изменения интеграла разности фаз и т.д. Приемную антенну 3 перемещают так, чтобы зафиксировать границы начала интегрирования и отметить таким образом на поверхности тела участки, где разность фаз не равна нулю. Эти участки предположительно являются проекциями патологических очагов внутри организма или повреждений.
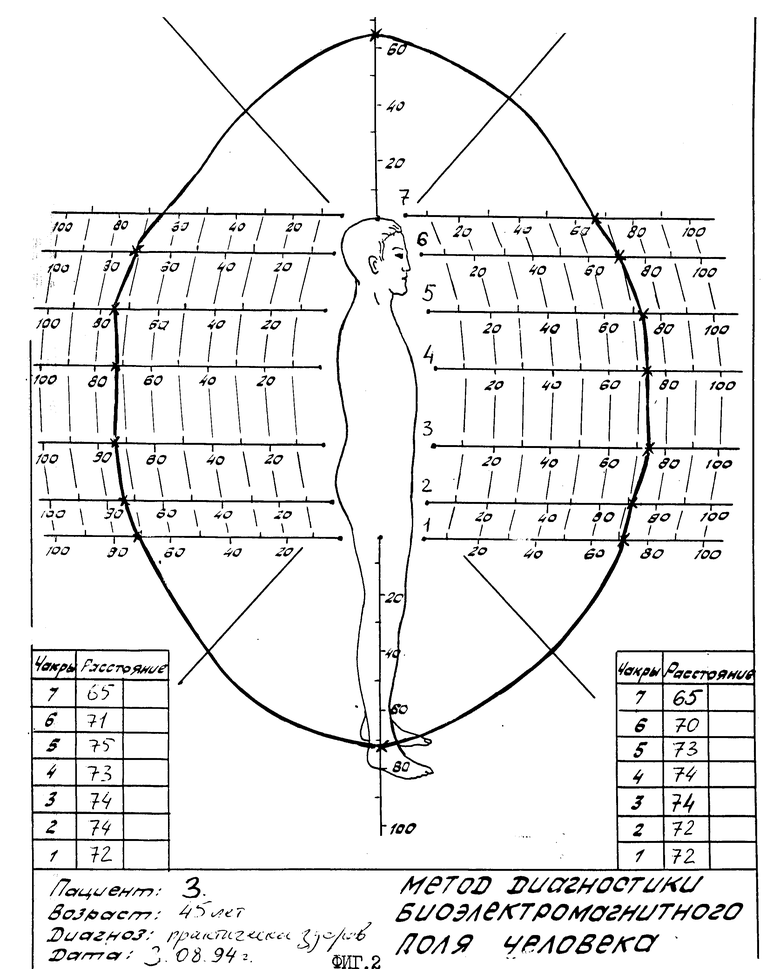
Пример 1. Пациент З., 45 лет, поступил в клинику для профилактического осмотра. Жалоб не предъявлял. Клиническое обследование подтвердило хорошее состояние здоровья. По данным обследования конфигурация поля в сагиттальной плоскости ровная, эллипсовидная, что свидетельствует о нормальном функционировании состояния пациента (фиг. 2). В этом и следующих примерах измерения проводились на частоте 7,4 кГц.
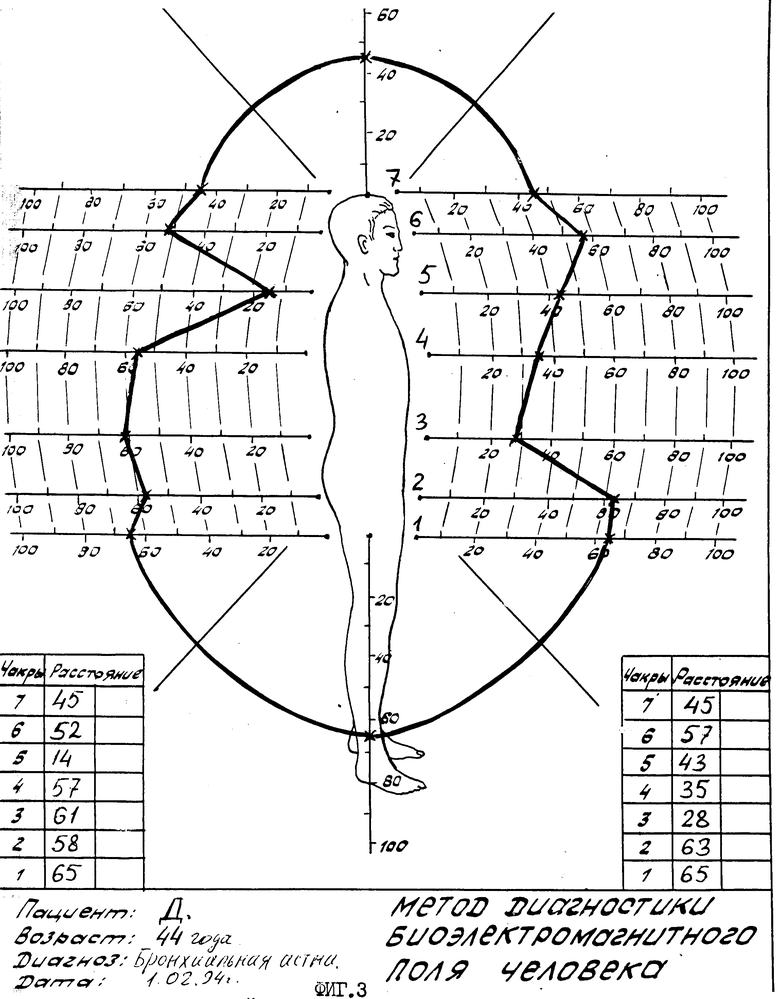
Пример 2. Больной Д., 44 года, находился на лечении в пульмонологическом отделении Республиканской клинической больницы им. Куватова с диагнозом: бронхиальная астма с частыми приступами. При измерении его электромагнитного поля выявлено, что в области V точки сзади и в области V, IV, III точек спереди имеется резкая деформация с наличием впадин, перетяжек. На основании этих данных (фиг. 3) можно было сделать предположение, что электромагнитное поле пациента деформировано не только за счет заболевания легких, но также имеются изменения со стороны сердца и органов желудочно-кишечного тракта, что было подтверждено в дальнейшем дополнительными клиническими исследованиями.
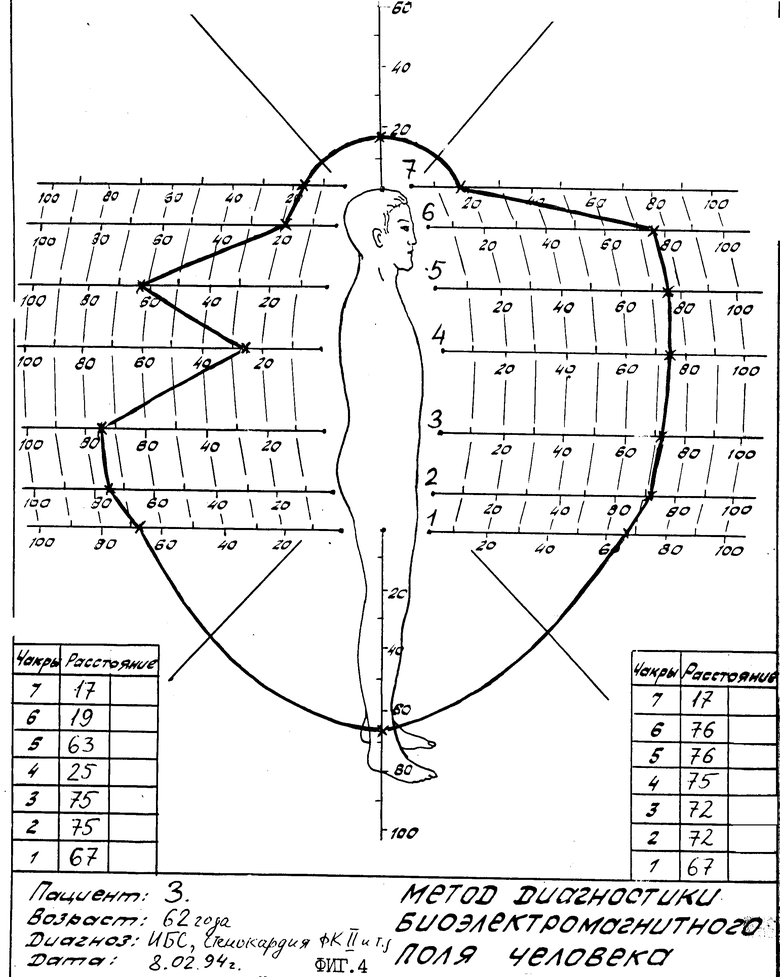
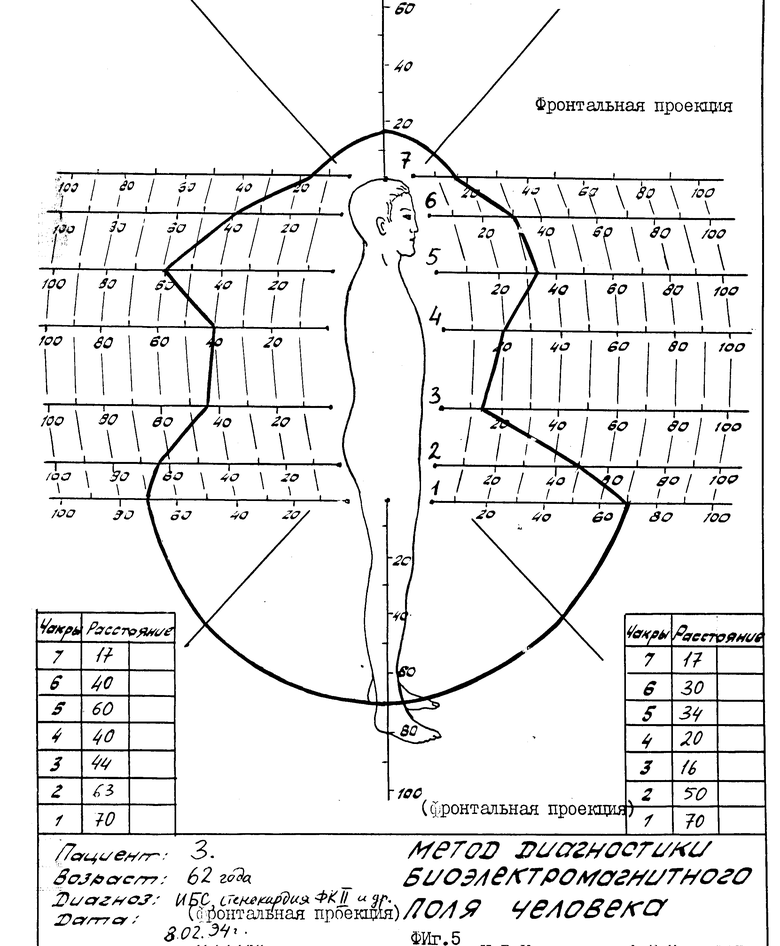
Пример 3. Больной З. , 52 года. Клинический диагноз: ИБС, стенокардия напряжения ФК II, хронический гастрит, мочекаменная болезнь, хронический пиелонефрит, киста правой почки. При регистрации поля в сагиттальной плоскости (фиг. 4) выявлена значительная деформация поля в области II и IV точек сзади. Во фронтальной плоскости (фиг. 5) изменение поля зарегистрировано в области IV и III точек, значительное снижение расстояния - в области VII точки. Через 5 месяцев после выписки больной вновь поступил в стационар по поводу нарушения мозгового кровообращения, что говорит о высокой диагностической точности способа на ранних стадиях заболевания и на стадиях предзаболеваний.
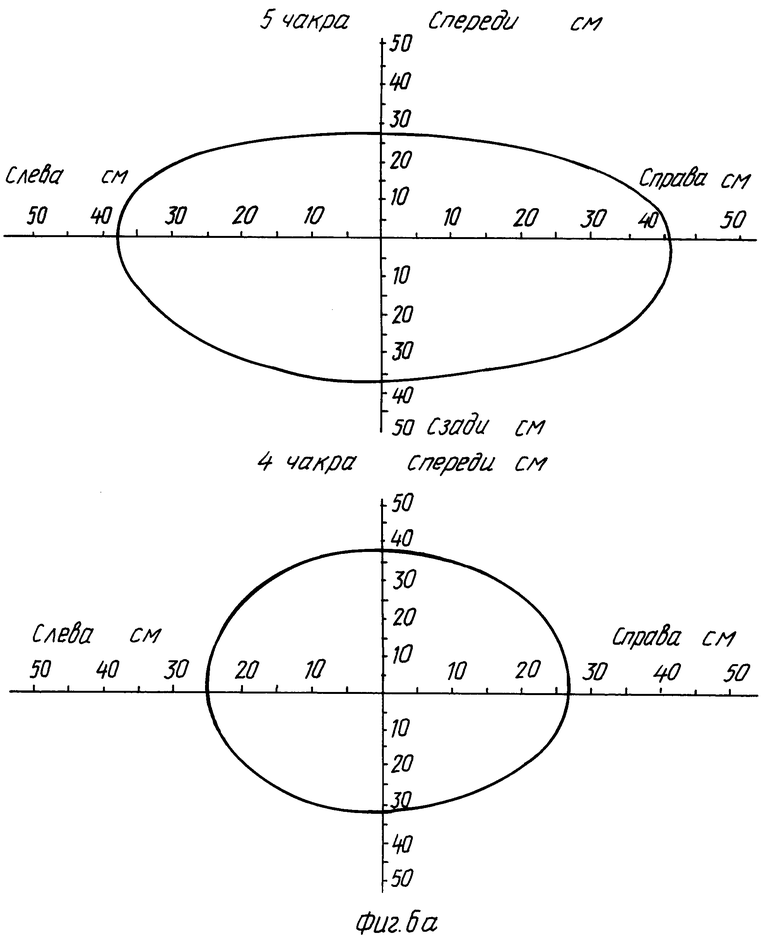
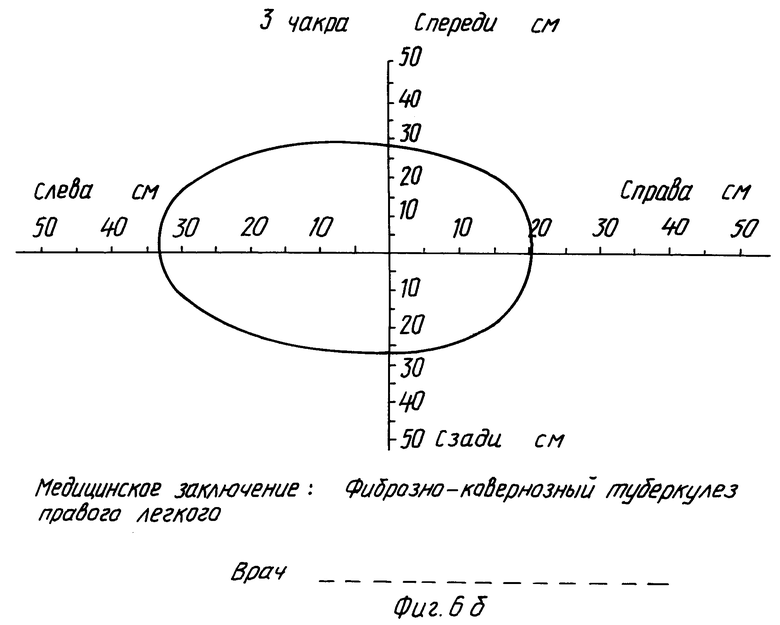
Пример 4. Больной Ф.Р.Т, 38 лет, находился на лечении в туберкулезном диспансере с диагнозом: фиброзно-кавернозный туберкулез правого легкого. Обследование проводилось по предложенному способу. Результаты построения эквипотенциальных кривых равной фазы по поперечным срезам, проходящим через III, IV и V точки, изображены на фиг.6 соответственно. Видно значительное сужение эквипотенциальной поверхности поля на уровне IV точки (сердечно-легочное сплетение) по сравнению с V точкой, а также несимметричное сужение на срезе через III точку (солнечное сплетение), преимущественно справа, что полностью соответствует клиническому диагнозу.
Пример 5. Больной Д. Д.А., 44 года, клинический диагноз: бронхиальная астма. В процессе прохождения курса лечения в стационаре было проведено три измерения по предлагаемому способу - второе через 6 суток после первого, третье через 7 суток после первого. Данные измерений (фиг.7) показывают частичное выравнивание дефектов эквипотенциальной фазовой поверхности, однако с одновременным снижением площади охватываемой кривой в сагиттальном сечении.
Пример 6. Больной П.К.О., 45 лет. Клинический диагноз: вегетососудистая дистония. При первом обследовании видно сильное уменьшение фазовой поверхности с провалами в области II, IV и VI точек и выбуханием в области III и V точек (фиг.8). В ходе прохождения курса лечения при повторном измерении, выполненном через 3 суток, и третьем измерении, выполненном еще через 11 суток, было выявлено расширение фазовой поверхности с увеличением площади, охватываемой кривой в сечении, однако с сохранением характера деформаций, в частности впадин в области IV точки и выбуханий в области III и V точек.
Пример 7. Проводилась экспресс-диагностика спортсмена-боксера К. непосредственно после проведения соревнований. Выравнивание помехового фона производили на расстоянии 20 см от поверхности кожи в области под правой ключицей. При перемещении приемного электрода с постоянной скоростью около 0,1 м/с параллельно поверхности тела по параллельным вертикальным прямым были обнаружены две зоны существенного отклонения фазы, показанные на фиг.10. В дальнейшем, при проведении клинических исследований были обнаружены сотрясение мозга и перелом левого ребра, т.е. были получены подтверждения найденных топографических зон повреждений.
Обследование по предлагаемому способу проводилось у 270 больных с различной патологией, из них 82 с ИБС, 61 с гипертонией, 22 с бронхиальной астмой, 40 с холециститом, 25 с язвенной болезнью желудка и 40 с туберкулезом легких. Контрольная группа состояла из 30 здоровых лиц. В группе здоровых лиц исследование показало, что эквипотенциальная фазовая поверхность представляет собой у 18 лиц геометрию эллипсоида на расстоянии 40 - 70 см от кожных покровов, у 12 лиц эквипотенциальная поверхность располагалась на расстоянии в тех же пределах, но имела небольшие отклонения от овальной формы. У лиц с патологией наблюдались явно выраженные деформации эквипотенциальной фазовой поверхности, значительные отклонения от ее эллипсоидальной формы в виде впадин, перетяжек, выпуклостей и т.д., расположение которых в основном совпадали с местами расположения пораженных органов и тканей. Кроме того, наблюдалось уменьшение площади фазовой поверхности по сравнению с данными контрольной группы. В процессе стационарного лечения и улучшения клинических показателей повторными измерениями по предлагаемому способу выявлено увеличение площади фазовой поверхности до 35 - 50 см у 91 процента пациентов, однако деформации ее сохранялись в 62 процентов случаев.
Таким образом, практически во всех случаях имелось совпадение клинических данных с данными оценки электромагнитного поля, что позволяет сделать заключение о достаточно высокой информативности предлагаемого способа.
Устройство для оценки электромагнитного поля (фиг.11) содержит приемный электрод-антенну 6, последовательно соединенные предварительный усилитель 7, импульсный фильтр 8, усилитель переменного тока 10, фазовый детектор 11, фильтр нижних частот 12, усилитель постоянного тока 13, образующие измерительный блок 14, входом которого является вход предварительного усилителя 7, и соединен с выходом приемного электрода 6; в состав измерительного блока 14 также входит генератор 9 опорной частоты и фазы, выход которого соединен со вторым входом импульсного фильтра 8 и вторым входом фазового детектора 11, и блок 16 компенсации помехового фона, выход которого соединен со вторым входом усилителя 13 постоянного тока, выход которого является выходом измерительного блока 14 и соединен со входом блока 15 индикации, который содержит интегратор 17, вход которого является входом блока 15, кнопку 18 сброса интегратора 17, выход которой соединен со вторым входом сброса интегратора 17, и индикаторный элемент 19, вход которого соединен с выходом интегратора 17.
Блок 15 индикации (фиг. 12) может дополнительно содержать нелинейный элемент 21 типа "зона нечувствительности", величина зоны которого регулируется напряжением, и элемент 22 настройки зоны нечувствительности, выход которого соединен с управляющим входом нелинейного элемента 21, вход которого является входом блока 15 индикации, а выход соединен со входом интегратора 17.
Устройство для оценки электромагнитного поля конструктивно может быть выполнено (фиг.14), например, в виде подвижной системы 20, содержащей вертикально расположенную штангу 23, по которой свободно с возможностью фиксации перемещается вверх - вниз приемный электрод 6, шкалу расстояния 24, расположенную параллельно штанге 23 и закрепленную нижними концами на каталке 25, на которой расположены измерительный блок 14 и блок 15 индикации.
Вариант выполнения устройства в виде ручного прибора (фиг.15) может содержать корпус 26 с рукояткой, внутри которого размещается измерительный блок 14 и блок индикации 15 вместе с автономными источниками питания; на внешней поверхности корпуса 26 расположен приемный электрод 6, на одном уровне с плоскостью которого расположен дальномер 27; на внешней поверхности корпуса 26 также расположен орган управления блока 16 компенсации, кнопка 18 сброса интегратора 17, индикаторный элемент 19 отклонения фазы и индикаторный элемент 28 расстояний дальномера 27.
Автоматизированный вариант устройства для оценки электромагнитного поля биообъекта (фиг.18) содержит блок 30 датчика положения пациента и его пропорций, программно-управляющий блок 31, содержащий клавиатуру ввода данных 32 и микроЭВМ 33 с дисплеем 37, клавиатуру 32 и дисплей 37 соединены со входами микроЭВМ 33, первый вход блока 31 соединен с выходом измерительного блока 14, а блок 30 датчиков - со вторым входом блока 31; содержит также три привода: радиального перемещения 34 приемного электрода 6, углового поперечного перемещения 35 приемного электрода 6 по окружности подвижной системы 20, которая может быть выполнена в виде полукольца 20, расположенного в поперечной плоскости над кушеткой 29 (фиг.20) и привода 36 возвратно-поступательного движения подвижной системы 20 вдоль кушетки 29; электрические входы приводов 34 - 36 соединены с первыми тремя выходами блока 31, четвертый выход которого соединен с дополнительным управляющим входом измерительного блока 14, которым является управляющий вход блока 16 компенсации помехового фона; механические выходы 34 - 36 соединены с приемным электродом 6 и подвижной системой 20; датчики 30 расположены вдоль кушетки 29. Вместо датчиков 30 положения и пропорций пациента устройство может содержать дальномер 27 (фиг.21), выход которого соединен со вторым входом блока 31. Для согласования формы представления информации первый и второй входы блока 31 соединен с микроЭВМ 33 через аналого-цифровые преобразователи 38 и 39, а четвертый выход блока 31 является выходом цифроаналогового преобразователя 40, вход которого соединен с выходом микроЭВМ 33.
Автоматизированный вариант устройства может также содержать четвертый привод (фиг.21, 23) 41, управляющий наклоном приемного электрода 6 относительно вертикальной оси в продольной плоскости, электрические вход которого соединен с пятым выходом блока 31, который также может являться последовательным портом ввода - вывода микроЭВМ 33.
Устройство для оценки электромагнитного поля биообъекта (фиг.11), реализующее предложенный способ, работает следующим образом.
При расположении приемного электрода-антенны 6 параллельно поверхности биообъекта образуется электроемкость, одной из обкладок которой является биообъект, а другой - приемная антенна 6. На последней наводится электрический заряд, пропорциональный напряженности электрической составляющей электромагнитного поля, окружающего биообъект в точке размещения антенны 6, и флуктуирующий в виде "белого шума". Поскольку антенна 6 является электрически малой, т.е. размеры ее пренебрежимо малы по сравнению с диапазоном рабочих длин волн, то резонансного усиления какой-либо одной частоты не происходит и антенна 6 принимает шумовой сигнал с равномерной амплитудно-частотной характеристикой, в результате чего не требуется настройки и регулировки коэффициента усиления. Шумовой электрический сигнал, пропорциональный заряду антенной емкости, усиливается предварительным усилителем 7, являющимся усилителем заряда, и поступает на первый вход в импульсный полосовой фильтр 8 с узкой полосой пропускания, выделяющий из шумового сигнала одну спектральную линию на частоте, равной частоте генератора 9 опорного сигнала, задающее напряжение с которого поступает на второй вход импульсного фильтра 8. Выделенная гармоническая частотная составляющая шумового сигнала с выхода импульсного фильтра 8 поступает в усилитель переменного тока 10 с большим коэффициентом усиления, где усиливается до насыщения усилителя 10 и поступает на первый вход фазового детектора 11, на второй вход которого поступает напряжение опорного сигнала опорной частоты и фазы с генератора 9. На выходе фазового детектора 11 появляется пульсирующий сигнал, площадь импульса которого пропорциональна разности фаз выделенной частотной составляющей принимаемого шумового сигнала и опорного сигнала генератора 9. Это напряжение сглаживается фильтром 12 нижних частот с большой постоянной времени, в результате чего на выходе последнего наблюдается постоянное напряжение, пропорциональное среднему значению импульсного напряжения с выхода фазового детектора 11, т.е. пропорциональное величине разности фаз, выходное напряжение фильтра 12 усиливается усилителем постоянного тока (УПТ) 13, выход которого является выходом измерительного блока 14, и поступает на вход блока индикации 15. При размещении приемной антенны 6 в точке выравнивания помехового фона (см. способ), получаемое на выходе УПТ 13 напряжение, пропорциональное сдвигу фаз в данной точке, компенсируют подбором балансировочного напряжения на выходе блока 16 компенсации помехового фона, которое поступает в УПТ 13 и вычитается из напряжения разности фаз. Выходное напряжение блока 16 подбирают так, чтобы напряжение на выходе УПТ 13 было равно нулю в данной точке размещения антенны 6. При этом т.к. напряжение на выходе интегратора 17 блока индикации 15 равно нулю, а интегратор 17 устанавливается на нулевые начальные условия интегрирования нажатием кнопки 18 сброса, напряжение на его выходе также равно нулю, что отображается элементом индикации 19. При перемещении антенны 6 вдоль прямой по направлению к биообъекту на подвижной системе 20 либо параллельно поверхности биообъекта руками оператора (см. способ) возникает момент, когда величина разности фаз принимаемого сигнала и сигнала опорного генератора 9 отличается от величины компенсирующего напряжения с выхода блока 16 компенсации, в результате чего на выходе УПТ 13 появляется сигнал, величина которого пропорциональна разности напряжений с выхода фильтра 12 нижних частот и с выхода блока 16. Этот сигнал поступает на вход блока 15 индикации, входом которого является вход интегратора 17, в результате чего последний начинает интегрировать, что отображается индикатором 19, на вход которого поступает выходной сигнал интегратора 17. Если нарушенное равновесие сохраняется и сигнал разности фаз продолжает отличаться от компенсирующего напряжения с блока 16, то интегратор 17 продолжает интегрировать до напряжения насыщения независимо от того, насколько мало это рассогласование. В этом случае скорость интегрирования пропорциональна величине рассогласования, т.е. пропорциональна приращению фазового сдвига принимаемого сигнала в данной точке пространства, в результате чего по скорости интегрирования можно судить о величине фазового скачка. Если необходимо регистрировать величину фазового скачка, превышающего наперед заданное постоянное значение, блок 15 индикации может содержать нелинейный элемент 21 типа "зона нечувствительности" с регулируемой величиной зоны напряжения с выхода элемента 22 настройки (фиг.12, 13). Т.к. нелинейный элемент 21 включен на входе интегратора 17, то последний начинает интегрировать сигнал рассогласования с выхода УПТ 13 только тогда, когда он превышает по величине величину зоны нечувствительности, которая задается величиной напряжения с элемента настройки 22 и может перестраиваться.
Устройство может быть выполнено в стационарном варианте (фиг. 14) с ручным перемещением приемного электрода-антенны 6 по штанге 23, снабженной шкалой расстояний 24. В этом случае все устройство может размещаться на каталке 25, а измерения выполняются в положении пациента лежа на кушетке (фиг. 1) либо сидя на стуле (фиг.1) в зависимости от точки измерения. Расстояние до эквипотенциальной поверхности над теменной областью пациента измеряют в положении сидя. Выравнивание помехового фона производят каждый раз при новом положении каталки 25 относительно пациента 1 в верхнем положении антенны 6 на штанге 23, т.е. для каждой новой точки измерения. Измеряемой величиной является расстояние от кожного покрова до поверхности равной фазы, отсчитываемое по шкале расстояний 24, а индикатор 19 позволяет фиксировать момент отсчета расстояния.
Вариант реализации устройства для экспресс-оценки электромагнитного поля биообъекта может быть выполнен в виде ручного прибора с автономным питанием, размещаемого в руках оператора и используемого согласно способу (фиг.9), с ручным перемещением приемного электрода-антенны 6, жестко смонтированным на корпусе 26 и перемещаемым вместе с прибором параллельно поверхности биообъекта 1.
Для быстрого (хотя и менее точного) построения эквипотенциальной фазовой поверхности поля биообъекта с помощью ручного прибора, последний может содержать дальномер 27, например, оптического, инфракрасного или ультразвукового типа с индикатором 28 расстояний (фиг.15, 16, 17). В этом случае перемещение приемной антенны 6 вместе с устройством вдоль прямых по направлению к биообъекту осуществляют руками оператора, а отсчет расстояний по дальномеру 27 с его индикаторного элемента 28 над исследуемой точкой производят в момент начала интегрирования интегратором 17, наблюдая показания первого индикаторного элемента 19.
Вариант реализации устройства может предусматривать автоматическое перемещение приемной антенны, а также автоматическое построение и реконструкцию эквипотенциальных фазовых поверхностей. Такое выполнение устройства позволяет производить оценку электромагнитного поля биообъекта наиболее точно ввиду автоматического выполнения всех процедур, а также благодаря проведению измерений с любой степенью дискретности вплоть до непрерывного сканирования эквипотенциальных фазовых поверхностей.
Автоматизированный вариант устройства для оценки электромагнитного поля биообъекта работает следующим образом.
Пациента укладывают на кушетку 29 (фиг.18 - 21) на спину или живот и производят установку датчиков 30 положения пациента по его росту, пропорциям, расположению вегетативных центров и т.п. за счет перемещения их вдоль кушетки 29 и фиксации напротив соответствующих точек пациента. После этого осуществляют включение устройства и вводят в программно-управляющий блок 31, например, с клавиатуры 32, если он реализован на базе микроЭВМ 33, координаты начальной точки А компенсации помехового фона (фиг.19), величину разности фаз поверхности равной фазы (в частном случае, нуль) и вводят команду начала работы. При этом программно-управляющий блок 31 (микроЭВМ 33, например, с последовательных портов), контролируя выходные электрические сигналы приводов 34 - 36, вырабатывает управляющие сигналы, поступающие с первых трех выходов блока 31 на входы приводов 34 - 36, осуществляя перемещение приемного электрода 6 и подвижной системы 20 так, чтобы электрод 6 установился в точку А. После этого программно-управляющий блок 31 включает первый контур регулирования, образованный четвертым выходом блока 31, соединенным с управляющим входом измерительного блока 14, которым является управляющий вход блока 16 компенсации, и соединением выхода измерительного блока 14 с первым входом блока 31. При этом с четвертого выхода блока 31 на управляющий вход измерительного блока 14 начинает поступать управляющий сигнал на вход управления блока 16 коррекции и изменяет его выходное напряжение в сторону уменьшения до нуля напряжения рассогласования с выхода измерительного блока 14, т. е. с выхода УПТ 13, пропорциональное разности фаз сигнала опорного генератора 9 и принимаемого сигнала помехового фона в точке А. Процесс установки напряжения с выхода блока 16 продолжается до полной компенсации помехового фона, после чего блок 31 отключает первый контур регулирования и включает второй контур регулирования, состоящей из третьего выхода блока 31, соединенного с входом привода 34 радиального перемещения с антенной 6, соединенной с входом измерительного блока 14, выхода измерительного блока 14, соединенного с первым входом блока 31. При этом блок 31 вырабатывает сигнал во втором контуре регулирования, поступающий на вход привода 34, в результате чего он перемещает антенну 6 по направлению к пациенту 1 на кушетке 29 до тех пор, пока сигнал на выходе измерительного блока 14 начнет отличаться от нуля и не сравняется по модулю с заданной величиной разности фаз, введенной с клавиатуры 32. После этого второй контур регулирования путем перемещения антенны 6 в радиальном направлении отслеживает эту величину до окончания работы устройства. Одновременно с включением второго контура регулирования программно-управляющий блок 31 вырабатывает по первому и второму выходу сигналы управления, поступающие на входы приводов 35 и 36 перемещения подвижной системы 20 с расположенной на ней антенной 6. В результате этого антенна 6 вместе с подвижной системой 20 перемещается в поперечном направлении относительно пациента по полуокружности вокруг него и в продольном направлении вдоль его тела по заложенной в блок 31 необходимой программе перемещения антенны 6. Все перемещения антенны 6 запоминаются блоком 31 и составляют снимаемую поверхность равной фазы (эквипотенциальную фазовую поверхность), сечения или проекции которой отображаются на индикаторном элементе 19, которым может служить, в частности, экран дисплея 37 при микропроцессорной реализации блока 31. В случае, если устройство имеет дальномер 27 вместо датчиков положения 30, то параллельно с перемещением антенны 6 измеряется расстояние от нее до поверхности тела пациента и сигнал, пропорциональный расстоянию, поступает на второй вход блока 31, где запоминается и отображается на дисплее 37 в виде профилей или проекций поверхности тела пациента, наложенных на соответствующие им профили или проекции фазовой поверхности. При реализации блока 31 с использованием ЭВМ 33 сигналы с выхода измерительного блока 14 и дальномера 27 подаются через первый и второй входы блока 31 на микроЭВМ 33 через аналого-цифровые преобразователи 38 и 39, а управляющий сигнал компенсации помехового фона передается с выхода микроЭВМ 33 на четвертый выход блока 31 через цифроаналоговый преобразователь 40.
При наличии дополнительной степени свободы подвижной системы 20, осуществляющей угловое перемещение антенны 6 в продольной плоскости (фиг.21), сигнал управления приводом углового продольного перемещения поступает на его вход с пятого выхода блока 31 согласно заложенной в него программе управления (фиг. 22), аналогично приводам 34 - 36. При этом одновременно с другими движениями антенны 6 (радиальным, круговым в поперечной плоскости, продольным вдоль кушетки 29) происходит поворот антенны 6 в продольной вертикальной плоскости (фиг.23). Это позволяет обеспечить ориентацию оси антенны 6 по нормали вдоль всей эквипотенциальной фазовой поверхности, имеющей форму любой сложности, в любом сечении.
Электромеханические приводы 34 - 36, 41 могут быть реализованы в виде электродвигателей, например, шагового типа. Приводы 34 - 36, 41 могут быть выполнены также в виде сервоприводов с местными обратными связями, соединенными с программно-управляющим блоком 31.
По сравнению с известными аналогами, в том числе с прототипом, предложенный способ оценки электромагнитного поля биообъекта обладает следующими преимуществами:
- значительно более широкими функциональными и диагностическими возможностями, поскольку за счет дополнительно введенных операций, осуществляемых в предложенном порядке и по предложенным условиям, позволяет типологически локализовывать очаг поражения, обнаружить функционально-морфологические нарушения органов и тканей организма, проводить неспецифическую диагностику отклонений от нормы общего состояния здоровья пациентов и т.д.;
- неинвазитивностью, бесконтактностью проводимых измерений и высокой степенью их экологичности, поскольку в процессе оценки поля не используется какие-либо воздействия на пациента, в том числе электромагнитные;
- высокой скоростью обследования, простотой обнаружения патологии и высокой инфекционной безопасностью;
- высокой степенью точности оценки электромагнитного поля, позволяющей проводить тонкую диагностику за счет предложенного оценивания состояния исследуемого биообъекта на основе анализа геометрии поверхности равной фазы;
- высокой помехозащищенностью, позволяющей проводить исследования без специальной экранированной камеры, а в целях экспресс-диагностики - вручную за счет использования шумов в качестве источника полезной информации, а также за счет применения фазового метода;
- более широкими функциональными возможностями, позволяющими использовать способ для оценки эффективности лечебного процесса и целенаправленного управления им.
По сравнению с известными устройствами, в том числе прототипом, предлагаемое устройство для оценки электромагнитного поля биообъекта следующими преимуществами:
- значительно более широкими функциональными возможностями, поскольку за счет дополнительно введенных элементов, соединенных предложенным образом, позволяет производить тонкую оценку пространственной конфигурации электромагнитного поля вокруг биообъекта на расстоянии от них;
- высокой точностью оценки электромагнитного поля, позволяющей обнаруживать его зависимость от состояния и функционирования внутренних органов, тканей и сред организма;
- высокой помехозащищенностью устройства, позволяющей реализовывать значительно более высокие величины общего коэффициента усиления;
- значительной простотой конструкции и высокой степенью технологичности и широким ассортиментом реализации в различных вариантах;
- высокими эксплуатационными характеристиками, поскольку позволяет обойтись без экранированной камеры, без специального заземления исследуемого биообъекта, обладает высокой простотой эксплуатации и обслуживания, высокой надежностью и не требует какой-либо специальной подготовки медицинского персонала;
- широкими возможностями автоматизации процессов измерения, интерпретации результатов и постановки общего диагноза.
Источники информации:
1. Патент США N 4940058, кл. A 61 B 5/00, 1990 (п.п. 6 - 9 формулы изобретения).
2. Радиотехника, N 8, 1991 c. 71-72.
3. Патент США N 4940058, кл. A 61 B 5/00, 1990 (п.п. 1-6 формулы изобретения).
4. Авторское свидетельство СССР N 1297800 кл. A 61 B 5/05, 1987.
5. Хаулике И. Вегетативная нервная система. Анатомия и физиология, - Бухарест, 1978, с 17-61.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2116099C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ЗЕМНОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2426566C2 |
| СПОСОБ ГЕОЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2119680C1 |
| СПОСОБ ЗАЩИТЫ ОТ ЭЛЕКТРОМАГНИТНЫХ АНОМАЛИЙ У ПОВЕРХНОСТИ ЗЕМЛИ | 1994 |
|
RU2118181C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ИДЕНТИФИКАЦИИ ПЛАСТИКОВЫХ МИН | 2002 |
|
RU2206907C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2002 |
|
RU2202812C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2245733C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ БИООБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2016543C1 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260816C2 |
Изобретение относится к медицине и медицинской технике и может быть использовано для неинвазивной дистанционной диагностики патологических и предпатологических состояний, в качестве средства предварительной диагностики, для топологической диагностики заболеваний органов в динамике, а также для контроля динамики процесса лечения. Технический результат - расширение функциональных и диагностических возможностей за счет осуществления оценки топологии эквипотенциальных поверхностей электромагнитного поля биообъекта по параметру фазового сдвига, проведения топологической диагностики органов и тканей, повышение точности диагностики и помехоустойчивости за счет применения сверхдлинноволнового диапазона и фазочастотного анализа, а также за счет использования шума как полезного сигнала. Топологический анализ конфигурации эквипотенциальных поверхностей поля позволяет оценить как общий потенциал защитных сил организма по относительным размерам эквипотенциальных поверхностей, так и локализацию патологических очагов по расположению впадин и выпуклостей на картине эквипотенциальной поверхности относительно тела биообъекта. Контроль за отклонением фазы принимаемого сигнала от опорного производят за счет того, что регистрируют сигнал, равный интегралу разности фаз принимаемого и опорного сигналов. Построение эквипотенциальной кривой в необходимом сечении можно производить по большому количеству точек с любой наперед заданной дискретностью, что целесообразно при автоматизации измерений и построений топограмм. При использовании следящей системы возможно непрерывное сканирование эквипотенциальной кривой с управлением перемещения приемного электрода по отклонению фазы принимаемого сигнала от опорного. 2 с. и 21 з.п.ф-лы, 23 ил., 1 табл.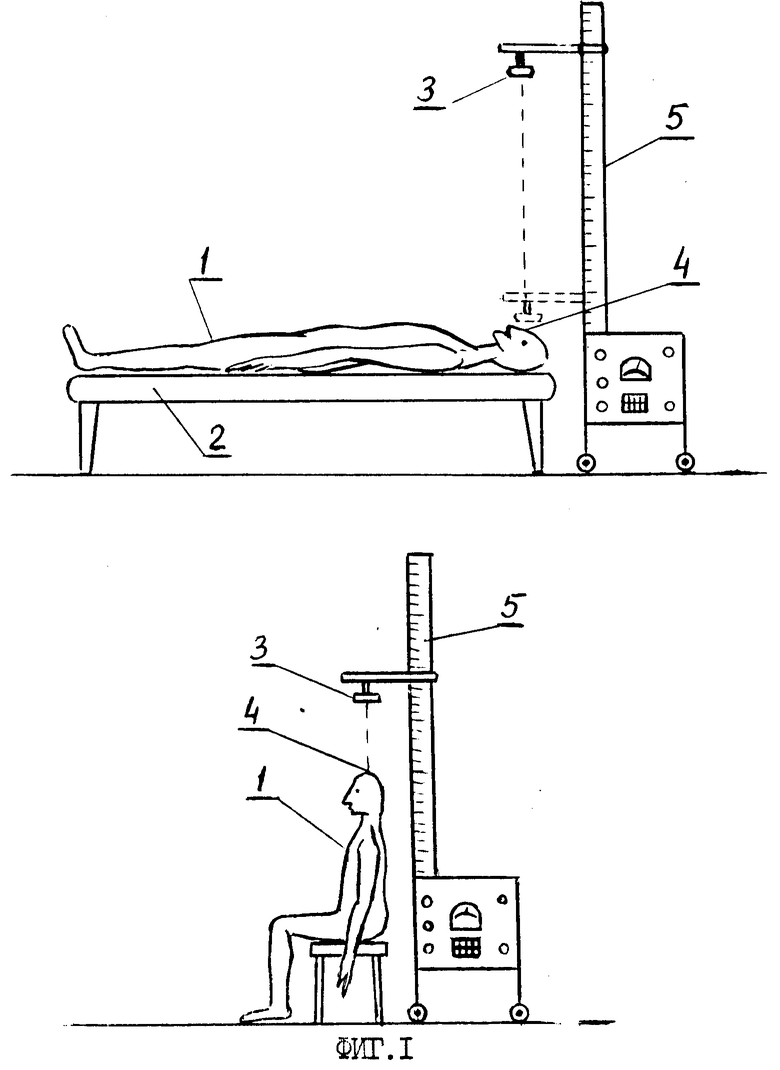
\\\1 1. Способ оценки электромагнитного поля биообъекта, заключающийся в том, что над поверхностью биообъекта измеряют пространственное распределение электрического заряда, измерения осуществляют за счет того, что на расстоянии над биообъектом располагают приемный электрод и измеряют его заряд, отличающийся тем, что измерения осуществляют в диапазоне сверхдлинных радиоволн по шумовой компоненте электрического заряда приемного электрода за счет того, что принимают сигнал шума с приемного электрода, выделяют частотную составляющую на фиксированной частоте из шумового сигнала флуктуаций заряда приемного электрода, а в качестве параметра оценки поля используют величину фазового сдвига между выделенной частотной составляющей и опорным сигналом той же частоты, а по конфигурации, расположению и форме относительно биообъекта кривых параметра оценки поля судят о наличии, степени и локализации патологии. \\\2 2. Способ по п.1, отличающийся тем, что измерения проводят по сечениям пространства вокруг биообъекта, причем в каждом сечении строят кривую эквипотенциальной поверхности измеряемого параметра поля. \\\2 3. Способ по п.1, отличающийся тем, что приемный электрод перемещают параллельно поверхности биообъекта на одинаковом расстоянии от него, при этом перед началом перемещения выравнивают фазу опорного и принимаемого сигналов подстройкой опорного сигнала, а в процессе перемещения фиксируют области на биообъекте, над которыми наблюдаются изменения фазы, по которым судят о локализации патологических процессов и изменений. \\\2 4. Способ по пп. 1 и 2, отличающийся тем, что кривую эквипотенциальной поверхности параметра оценки поля в каждом сечении биообъекта строят за счет того, что каждый раз выравнивают помеховый фон благодаря тому, что устанавливают приемный электрод на одинаковом расстоянии от биообъекта, подстройкой фазы опорного сигнала выравнивают фазу опорного и принимаемого сигналов, затем перемещают с постоянной скоростью приемный электрод вдоль прямой по направлению к биообъекту и определяют расстояние от приемного электрода до биообъекта, начиная с которого регистрируют ненулевую величину или превышение над наперед заданной постоянной величиной разности фаз между принимаемым и опорным сигналами. \\\2 5. Способ по пп.1 - 4, отличающийся тем, что каждый раз изменяют частоту опорного сигнала в пределах диапазона сверхдлинных радиоволн и для каждой частоты строят соответствующую кривую эквипотенциальной поверхности измеряемого параметра поля. \\\2 6. Способ по пп.1 - 5, отличающийся тем, что отклонение фазы принимаемого сигнала от опорного регистрируют за счет того, что определяют величину интеграла разности фаз принимаемого и опорного сигналов, по его наличию и изменению судят об отклонении фазы принимаемого сигнала от фазы опорного сигнала, а по скорости нарастания - о величине разности фаз и каждый раз перед новым измерением устанавливают нулевые начальные условия интегрирования. \\\2 7. Способ по пп.1, 2 и 5, отличающийся тем, что кривую эквипотенциальной поверхности поля в сечении строят за счет того, что осуществляют автоматическое перемещение приемного электрода непосредственно по кривой эквипотенциальной поверхности вокруг биообъекта в пределах каждого сечения за счет того, что производят движение приемного электрода по окружности вокруг биообъекта в плоскости сечения, определяют величину отклонения разности фаз опорного и принимаемого сигналов от наперед заданного значения, управляют радиальным перемещением приемного электрода по отклонению разности фаз от заданного значения и определяют расстояние и конфигурацию эквипотенциальной кривой до биообъекта. \\\2 8. Способ по п.7, отличающийся тем, что по полученным сечениям биоэлектромагнитного поля производят реконструкцию трехмерных эквипотенциальных поверхностей поля для каждого значения частоты. \\\2 9. Способ по п.7, отличающийся тем, что смену сечений биоэлектромагнитного поля биообъекта производят автоматически по заданной программе так, что осуществляют непрерывное сканирование приемным электродом эквипотенциальной поверхности параметра поля биообъекта, например, по спиральной траектории. \\\2 10. Способ по пп.7 - 9, отличающийся тем, что дополнительно одновременно с измерением поля определяют конфигурацию поверхности биообъекта или его основные пропорции и совмещают их в одном масштабе с получаемыми эквипотенциальными поверхностями поля. \\\2 11. Способ по пп.1 - 2 и 4 - 10, отличающийся тем, что при определении конфигурации эквипотенциальных поверхностей по уменьшению их размеров судят о понижении общих защитных сил организма, а по локализации впадин и локальных выпуклостей эквипотенциальной поверхности судят о локализации патологических морфофункциональных изменений в соответствующих местах тканей и органов биообъекта. \\\2 12. Способ по пп.1 - 2 и 4 - 11, отличающийся тем, что сечения эквипотенциальной поверхности располагают так, чтобы они проходили через центры вегетативных нервных сплетений и подкорковых образований, при этом по локализации деформаций эквипотенциальной поверхности в соответствующих центрах судят о патологии органов, управляемых этими центрами. \\\2 13. Способ по пп.1, 2 и 4 - 12, отличающийся тем, что измерения проводят периодически в процессе курса медикаментозной, физио-, рефлексо-, мануальной или других видов терапии и образуют обратную связь по параметрам терапевтического воздействия за счет того, что по динамике изменения конфигурации эквипотенциальных поверхностей в процессе терапии судят о ее эффективности и точности и при необходимости производят коррекцию схем, доз и видов лечения. \ \ \2 14. Устройство для оценки электромагнитного поля биообъекта, содержащее приемный электрод, соединенный с входом измерительного блока, выход которого соединен с входом блока индикации, отличающееся тем, что измерительный блок содержит последовательно соединенные предварительный усилитель, импульсный фильтр, усилитель переменного тока, фазовый детектор, сглаживающий фильтр низких частот и усилитель постоянного тока, а также содержит генератор сигналов опорной частоты и фазы, выход которого соединен с вторым входом импульсного фильтра и вторым входом фазового детектора, блок компенсации помехового фона, выход которого соединен с вторым входом усилителя постоянного тока, выход которого является выходом измерительного блока, вход предварительного усилителя является входом измерительного блока. \\\2 15. Устройство по п. 14, отличающееся тем, что блок индикации содержит интегратор, вход которого является входом блока индикации, выход интегратора соединен с входом индикаторного элемента, вход сброса интегратора соединен с выходом элемента сброса интегратора. \\\2 16. Устройство по п.14, отличающееся тем, что блок индикации содержит нелинейный элемент типа "зона нечувствительности" с переменной величиной зоны, вход которого является входом блока индикации, элемент настройки зоны нечувствительности, выход которого соединен с управляющим входом нелинейного элемента, интегратор, вход которого соединен с выходом нелинейного элемента, элемент сброса интегратора, выход которого соединен с входом сброса интегратора, индикаторный элемент, вход которого соединен с выходом интегратора. \\\2 17. Устройство по п.14, или 15, или 16, отличающееся тем, что в него введен дальномер, например оптический, инфракрасный или ультразвуковой, вход которого расположен рядом с приемным электродом на одном с ним уровне и расположен в направлении, перпендикулярном плоскости электрода, а в блок индикации введен второй индикаторный элемент, вход которого является вторым входом блока индикации и соединен с выходом дальномера. \ \\2 18. Устройство по п.14, отличающееся тем, что в него введены три независимых электромеханических привода приемного электрода, соединенные с ним, программно-управляющий блок, три выхода которого соединены с входами трех приводов, четвертый выход программно-управляющего блока соединен с управляющим входом измерительного блока, выход которого соединен с первым входом программно-управляющего блока, введен управляющий вход в блок компенсации помехового фона, который является управляющим входом измерительного блока. \ \\2 19. Устройство по п.18, отличающееся тем, что в него введен блок датчиков положения пациента и его пропорций, выход блока датчиков соединен с вторым входом программно-управляющего блока. \\\2 20. Устройство по п.18, отличающееся тем, что в него введен дальномер, вход которого расположен на одном уровне с приемным электродом, а выход соединен с вторым входом программно-управляющего блока. \\\2 21. Устройство по п.18 и любому из пп. 19 и 20, отличающееся тем, что в него введен четвертый электромеханический привод перемещения приемного электрода, вход которого соединен с пятым выходом программно-управляющего блока, а выход соединен с приемным электродом. \ \\2 22. Устройство по пп.18, 21 и любому из пп.19 и 20, отличающееся тем, что электромеханические приводы перемещения приемного электрода выполнены в виде шаговых электрических двигателей. \\\2 23. Устройство по пп. 18 - 21 и любому из пп.19, 20, 22, отличающееся тем, что программно-управляющий блок содержит микроЭВМ с клавиатурой и дисплеем, соединенными с входами микроЭВМ, два аналого-цифровых и цифроаналоговый преобразователи, соединенные параллельно портами ввода-вывода микроЭВМ, входы аналого-цифровых преобразователей являются первым и вторым входами программно-управляющего блока, выход цифроаналогового преобразователя является четвертым выходом программно-управляющего блока, первый, второй, третий и пятый входы программно-управляющего блока являются последовательными портами ввода-вывода микроЭВМ.
| Устройство для измерения электрического заряда биологических объектов | 1985 |
|
SU1297800A1 |

