Изобретение относится к поисково-спасательным работам и может быть использовано для поиска засыпанных биообъектов или их останков в районах землетрясений, а также в альпинизме при поиске биообъектов, засыпанных, например, снежными лавинами или горными обвалами.
Известен способ радиопеленга местонахождения засыпанных снежной лавиной альпинистов, заключающийся в предварительном размещении в одежде альпиниста малогабаритного маломощного приемопередатчика, включение его на постоянную работу в режиме передачи сигналов радиомаяка во время рабочего движения альпиниста и последующий радиопеленг сигналов маяка с помощью нескольких аналогичных приемопередатчиков в случае попадания альпиниста в снежную лавину с расстояния не более 60 м [1].
Недостатками известного способа являются низкие функциональные возможности и ограниченная сфера применения, поскольку известный способ имеет активный характер, то есть требует предварительного размещения специального оборудования (приемопередатчика) на объектах, подлежащих поиску. В связи с этим известный способ может реально использоваться лишь в случаях ожидаемого засыпания, например лавиной, и лишь непродолжительное время (не более нескольких часов). Известный способ не может быть применен при неожиданных сходах лавин или внезапных горных обвалах, а также на больших территориях по причине невозможности размещения передатчиков на всех биообъектах, подлежащих защите, и невозможности их работы продолжительное время, например в районах землетрясений. Кроме того, известный способ обладает низкими функциональными возможностями по причине того, что не позволяет обнаруживать останки биообъектов, засыпанных грунтом, снегом и так далее через продолжительное время после засыпания.
Известен способ поиска засыпанных людей с помощью специально обученных собак [1].
Недостатками известного способа являются низкие функциональные возможности по причине невозможности применения для поиска останков сроком более года после их засыпания, поскольку способ основан на обнаружении местонахождении собаками по запаху, что связано с его ослаблением и исчезновением со временем. Также к недостаткам относится субъективный характер способа, неоднозначная реакция собак, зависимость качества поиска от состояния собак, их обученности, погодных и климатических условий, что ухудшает точность и эксплуатационные возможности способа.
Наиболее близким к предлагаемому является известный способ определения местонахождения живых существ, попавших в завал, заключающийся в том, что перемещают зонд параллельно поверхности засыпанного участка в направлении поиска, в качестве зонда используют антенну, ориентируют ее поверхность параллельно поверхности засыпанного участка, принимают в процессе перемещения антенны полезный сигнал и осуществляют его фазочастотный анализ. Кроме того, в процессе перемещения зонда постоянно излучают в землю по меньшей мере два луча высокочастотной электромагнитной энергии, значительно отличающиеся по частоте, а полезный сигнал принимают как отраженный на границе между землей и живым существом [2].
Недостатками известного способа являются низкие эксплуатационные характеристики и высокая сложность по причине активности способа ввиду применения радиолокационного метода, предполагающего "просвечивание" засыпанного участка высокочастотными конентрированными пучками электромагнитной энергии большой мощности. Известный способ обладает также пониженными функциональными возможностями, т. к. удовлетворительно работает лишь в случае относительно однородной среды завала. Это объясняется тем, что при завалах повышенной неоднородности, имеющих место, например, в районах землетрясений при разрушении зданий, образуются многократные хаотические отражения лучей от множества границ неоднородностей среды, что обусловливает высокий уровень помех и ложных срабатываний.
Известно устройство (приемопередатчик) для обнаружения местонахождения альпинистов, засыпанных снежной лавиной, содержащее антенну, приемный блок, первый вход которого соединен с выходом антенны, а второй вход - с выходом блока питания. Кроме того, устройство содержит передающий блок, вход которого соединен с выходом блока питания, а выход передающего блока соединен через коммутатор с антенной. Кроме того, устройство работает в средневолновом диапазоне [1].
Недостатками известного устройства являются низкие функциональные возможности и эксплуатационные характеристики по причине того, что устройство позволяет определять местонахождение лишь тех биообъектов, на которых были предварительно расположены устройства, то есть в случае ожидаемого ориентировочного места и времени обвала, что практически полностью исключает применение устройства при масштабе стихийных бедствий, например, при землетрясениях или в случае неожиданных сходов лавин, обвалов и так далее. Кроме того, относительно большой расход энергии автономных источников питания при передаче радиосигналов в значительной мере ограничивает время поиска практически несколькими часами сразу после засыпания.
Наиболее близким к предлагаемому является устройство для определения местонахождения живых существ, попавших в завал, содержащее антенну, приемный блок, первый вход которого соединен с выходом антенны, а второй вход - с выходом блока питания, приемный блок имеет усилитель переменного тока, фильтр и элемент индикации. Кроме того, устройство содержит передающий блок, выход которого соединен со входом антенны через коммутатор, амплитудный детектор, вход которого соединен с выходом усилителя переменного тока, а выход детектора соединен с входом фильтра, выход которого подключен ко входу элемента индикации [2].
Недостатками известного устройства являются высокая сложность и низкие эксплуатационные характеристики по причине наличия многочастотного передатчика большой мощности и направленной сфазированной антенны, а также по причине связанного с этим высокого энергопотребления, что требует использования громоздких автономных источников питания большой емкости и частоты их подзаряда.
К недостаткам известного устройства относятся также низкие функциональные возможности по причине снижения точности и помехозащищенности в случае завала повышенной неоднородности, что резко ограничивает область применения известного устройства. Известное устройство вместе с этим обладает низкой экологичностью поскольку излучаемая электромагнитная энергия используемого диапазона при применяемых значительных мощностях передатчика неблагоприятно действует на состояние живых биообъектов, особенно имеющих повреждения в случае завала. Кроме того, известное устройство при работе образует значительные помехи радиоприему, а также создает помехи другим аналогичным устройствам, одновременно работающим на соседних, близко расположенных участках.
Целью изобретения является расширение функциональных возможностей, улучшение эксплуатационных характеристик, сокращение времени поиска и упрощение способа, за счет осуществления возможности поиска биообъектов, засыпанных различными видами грунта, в том числе повышенной неоднородности, например развалинами зданий, снегом, пассивным образом без предварительного размещения какого-либо оборудования на биообъектах, подлежащих поиску, а также дистанционным бесконтактным образом.
Для достижения поставленной цели в известном способе обнаружения местонахождения живых существ, попавших в завал, заключающемся в том, что перемещают зонд параллельно поверхности засыпанного участка в направлении поиска, в качестве зонда используют антенну, ориентируют ее поверхности параллельно поверхности засыпанного участка, принимают в процессе перемещения антенны полезный сигнал и осуществляют его фазочастотный анализ, дополнительно в качестве антенны используют электрически малую антенну, а в качестве полезного сигнала принимают электрическую составляющую радиошумов естественного электромагнитного поля Земли сверхдлинноволнового диапазона, при этом фазочастотный анализ шумового сигнала производят за счет того, что выделяют из шума фазу его гармонической составляющей на фиксированной частоте за счет того, что его фильтруют и непрерывно в процессе перемещения антенны сравнивают фазу отфильтрованного сигнала с эталонной фазой, а по результатам сравнения судят о расположении биообъекта или его останков. Кроме того, перед началом перемещения антенны производят статическую компенсацию помехового фона за счет установки величины фазы эталонного сигнала, равной фазе сигнала, выделенного из принимаемого радиосигнала при неподвижной антенне. Кроме того, перед началом поиска производят динамическую компенсацию помехового фона от неоднородностей грунта за счет того, что помещают антенну над типовой частью поверхности засыпанного участка, не содержащей заведомо биообъектов, и устанавливают такую величину порога разности фаз принимаемого и эталонного сигналов, чтобы величина разности фаз не превышала при этом установленной пороговой величины. Кроме того, интегрируют сигнал разности фаз в процессе перемещения антенны, отображают динамику изменения величины интеграла и по его появлению и резкому изменению определяют нахождение биообъекта или его останков под точкой поверхности участка, над которой произошло начало резкого изменения интеграла разности фаз. Кроме того, перемещение антенны производят с постоянной скоростью. Кроме того, до фиксации сигнала интеграла разности фаз производят периодическую установку нулевых начальных условий интегрирования в процессе перемещения антенны. Кроме того, после появления и резкого изменения интеграла разности фаз в процессе перемещения антенны ее возвращают назад, устанавливают нулевые начальные условия интегрирования, отступают вправо или влево от траектории движения на величину до 0,5 м и перемещают антенну в том же направлении до новой фиксации сигнала интеграла разности фаз, таким образом производят фиксацию контура скрытого биообъекта, всякий раз отводя антенну назад, устанавливая нулевые начальные условия интегрирования и перемещая ее в новом направлении, ортогональном контуру биообъекта.
Для достижения поставленной цели в известное устройство для обнаружения местонахождения живых существ, попавших в завал, содержащее антенну, приемный блок, первый вход которого соединен с выходом антенны, а второй вход - с выходом блока питания, приемный блок имеет усилитель переменного тока, фильтр и элемент индикации, дополнительно введены последовательно соединенные предварительный усилитель и импульсный фильтр, фазовый детектор и последовательно соединенные усилитель постоянного тока, пороговый элемент и интегратор, соединенный с элементом индикации, фильтр выполнен в виде фильтра нижних частот и включен между фазовым детектором и усилителем постоянного тока, при этом вход предварительного усилителя является первым входом приемного блока, кроме того, дополнительно введены генератор опорной частоты и фазы, выход которого соединен со вторыми входами импульсного фильтра и фазового детектора, блок компенсации, выход которого соединен со вторым входом балансировки усилителя постоянного тока, блок регулирования порога, выход которого соединен со вторым входом порогового элемента, кнопка сброса, выход которой соединен со вторым входом сброса интегратора, а усилитель переменного тока включен между импульсными фильтром и фазовым детектором.
Кроме того, антенна является электрической и выполнена в виде плоской электропроводящей пластины, размеры которой пренебрежимо малы по сравнению с рабочими длинами волн.
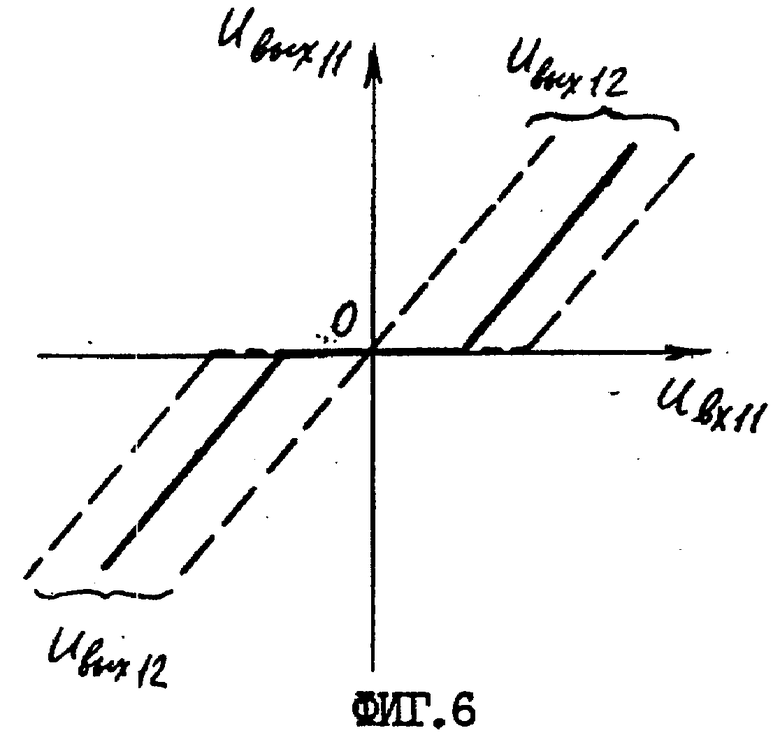
На фиг. 1 - 3 изображены схемы поиска засыпанных биообъектов при передвижении оператора по поверхности засыпанного участка соответственно на лыжах, пешком, над поверхностью участка на вертолете; на фиг. 4 - схема процесса определения контура проекции засыпанного объекта на поверхность насыпи; на фиг. 5 - функциональная схема устройства для обнаружения местонахождения засыпанных биообъектов или их останков; на фиг. 6 - характеристика "вход-выход" порогового элемента и схема ее регулирования.
Способ основан на способности биологических объектов, в том числе их останков, независимо от времени их образования интенсивно искажать фазовые характеристики фонового электромагнитного поля, имеющего характер шума с распределенным непрерывным спектром в диапазоне сверхдлинных радиоволн на определенных фиксированных частотах. Эти искажения превышают, как правило, на несколько порядков искажения поля от неоднородностей грунта, связанных с нахождением в нем объектов неживой природы, что позволяет достаточно легко отдифференцировать их друг от друга по уровню вносимых ими фазовых искажений. Способ основан также на определении фазовых характеристик при гармоническом покомпонентном анализе шумового сигнала фонового электромагнитного поля как источника полезного сигнала непосредственно над поверхностью засыпанного участка в местах предположительного нахождения объектов поиска. Это обеспечивает высокую помехозащищенность способа, недостижимую любыми другими известными из литературных источников способами, основанными, как правило, на амплитудных, а не на фазовых измерениях, что позволило в свою очередь в значительной мере увеличить общее усиление и повысить чувствительность до предела, при котором без труда обнаруживаются различия в характеристиках полевого фона вблизи объектов живого и неживого происхождения. Высокой помехозащищенности способа способствует также тот факт, что прием шумовых сигналов осуществляют по их электрической, а не магнитной компоненте за счет предложенных операций способа. Пассивный характер способа, отсутствие необходимости предварительного размещения какого-либо оборудования на объектах поиска, а также возможность достаточно четкого различения искажений поля, вызванных объектами живой природы, от других неоднородностей грунта обеспечивает значительное расширение функциональных возможностей, так как позволяет осуществлять поиск биообъектов, засыпанных неожиданным непроизвольным образом на больших поверхностях не только в снежных лавинах, но и в горных обвалах, в районах землетрясений и так далее. Кроме того, дополнительно введенные операции позволяют находить местоположение останков биообъектов, засыпанных со сроками давности год и более, что не позволяет производить ни один из известных способов.
Способ обнаружения местонахождения засыпанных биообъектов или их останков осуществляют следующим образом.
Перемещаясь по поверхности засыпанного участка на лыжах (фиг. 1) в случае нахождения объектов поиска под снегом, пешком (фиг. 2) или на транспортном средстве, в случае нахождения объектов поиска под обломками зданий, горными обвалами и т.д. или же в непосредственной близости над поверхностью (фиг. 3) засыпанного участка (на вертолете, воздушном шаре и т.д. ), перемещают параллельно поверхности засыпанного участка приемную антенну на высоте 1,5-2 м так, чтобы относительно земли она двигалась с постоянной скоростью. Непрерывно в процессе перемещения антенны принимают в качестве полезного сигнала электрическую компоненту радиошумов сверхдлинноволнового диапазона с равномерным спектром за счет того, что используют электрически малую антенну, частоты резонанса которой несравнимо выше верхней границы рабочего диапазона частот. В связи с этим резонансного усиления на какой-либо частоте не происходит и прием осуществляют с равномерной амплитудно-частотной характеристикой во всем диапазоне рабочих частот. Принятый шумовой сигнал фильтруют так, чтобы выделить его гармоническую составляющую на фиксированной частоте, при этом амплитуда гармонической составляющей не имеет значения в связи с чем можно применить усиление этого сигнала вплоть до насыщения усилительного устройства, поскольку в качестве информативной используется лишь фаза гармонической составляющей. Практически фазочастотный анализ принимаемого сигнала производят в одной точке на одной фиксированной частоте в процессе всей процедуры поиска. Конкретное значение этой частоты определялось экспериментально по максимуму вносимых биообъектами фазовых сдвигов в гармоническую составляющую принимаемого шумового сигнала. Перед началом перемещения антенны располагают ее плоскость параллельно поверхности засыпанного участка на рабочей высоте и производят статическую компенсацию помехового фона. Это осуществляют выравниванием величины фазового сдвига выделенной гармонической составляющей за счет того, что подстраивают величину эталонной фазы под фазу принимаемого сигнала так, чтобы разностный фазовый сдвиг равнялся нулю. После этого производят динамическую компенсацию помехового фона, который вызывается встречающимися на пути перемещения антенны неоднородностями насыпанного грунта. Для этого перемещают антенну параллельно поверхности засыпанного участка типовой структуры слоя насыпи, заведомо не содержащего биообъектов, и устанавливают величину порога для разности фаз принимаемого и эталонного сигналов, превышающую отклонение фазы принимаемого сигнала от установленной при статической компенсации фазы эталонного сигнала, чтобы ни одна неоднородность небиологической природы не воспринималась при поиске как помеха. Далее производят рабочее перемещение антенны в направлении поиска по всей засыпанной территории в местах предположительного нахождения биообъектов. Непрерывно в процессе перемещения антенны интегрируют результат сравнения сигнала разности фаз принятого и эталонного сигналов с величиной порога. В отсутствии биообъектов или их останков в грунте под текущим местом нахождения антенны результат интегрирования равен нулю, поскольку благодаря проведенной динамической компенсации помехового фона величина разности фаз не превышает величину порога. Периодически устанавливают нулевые начальные условия интегрирования во избежание накопления аппаратурного дрейфа нуля.
При прохождении антенны над биообъектом или его останками, находящимися под слоем грунта, в том числе снега, появляется значительное отличие фазового сдвига принимаемой гармонической составляющей радиошума от установленной величины, которое превышает установленную пороговую величину. Такое превышение четко наблюдалось всякий раз при нахождении объектов поиска на глубине до 5 м и более. В результате этого появляется сигнал интеграла разности фаз, который продолжает изменяться вплоть до насыщения интегрирующего устройства, что легко фиксируют известными индикаторными устройствами. В случае появления и стойкого изменения сигнала интеграла разности фаз, возвращают антенну назад в положение до появления этого сигнала, устанавливают нулевые начальные условия интегрирования, отступают от траектории движения в перпендикулярном направлении и вновь начинают перемещать антенну в направлении к биообъекту, до нового появления скачка разности фаз и сигнала интеграла разности фаз. Повторяя эти операции многократно, фиксируют контур биообъекта при необходимости, при этом следующее новое перемещение антенны в сторону биообъекта производят в направлении, ортогональном к его контуру или близком к нему (фиг. 4).
Пример 1. При разборке завалов дома N 18 после землетрясения в г. Нефтегорске, происшедшего в мае 1995 г., на уровне второго этажа разыскивались пять членов семьи, находящихся под завалами (плитами и обломками стен и перекрытий и деревянных полов). Единственный оставшийся в живых глава семьи показал местонахождение квартиры, но не знал, где искать тела погибших.
С помощью прибора "Универсал" путем применения его предложенным образом был проведен поиск возможного расположения погибших родственников. Скорость перемещения антенны составляла 0,5 м/с. Было определено пять предположительных мест нахождения тел погибших с указанием их контуров. После разборки завалов в указанных местах оказалось, что в четырех местах были обнаружены тела погибших, а в пятом месте находились белье и верхняя одежда из раздавленного шифоньера.
При повторном поиске был указан контур последнего члена погибшей семьи (младшего сына), что подтвердилось при последующей разборке завала.
Пример 2. Для проверки возможностей способа обнаружения местонахождения биообъектов и устройства "Универсал" по предложенному изобретению при определении местонахождения живых людей под деревянным перекрытием проводился эксперимент по поиску человека, находящегося в подвале одноэтажного деревянного дома. С помощью предложенного способа "Универсал" было определено местоположение спрятавшегося человека, которое совпало с его фактическим местонахождением.
При этом глубина нахождения человека от верхней поверхности пола составила 3,5 м, толщина деревянного перекрытия 0,05 м. Скорость перемещения антенны - около 0,2 м/с. Был обозначен контур проекции находящегося в подвале человека на пол дома.
Пример 3. Для проверки возможностей предложенного способа и устройства при определении местонахождения человека под снегом в сугробе высотой 2,5 м на уровне земли был прокопан туннель, где спрятался человек. Оператор, не зная его местонахождение, провел поиск расположения человека по предложенному способу, находясь на лыжах. Место, указанное оператором, и фактическое расположение человека совпали.
Устройство для обнаружения местонахождения засыпанных биообъектов или их останков (фиг. 5) содержит антенну 1, выполненную в виде плоской металлической пластины круглой, прямоугольной или треугольной формы в плане, электрически соединенную со входом приемного блока 2, который содержит предварительный усилитель 3, вход которого является входом приемного блока 2, последовательно соединенные импульсный фильтр 4, усилитель переменного тока 6, фазовый детектор 7, фильтр нижних частот 8, усилитель постоянного тока 9, пороговый элемент 11, интегратор 13 и индикаторный элемент 14, причем первый вход импульсного фильтра 4 соединен с выходом предварительного усилителя 3, приемный блок 2 также содержит генератор опорных сигналов 5, выход которого соединен со вторым входом импульсного фильтра 4 и вторым входом фазового детектора 7; блок компенсации 10 помехового фона, выход которого соединен со вторым инвертирующим входом усилителя постоянного тока 9; блок регулирования величины порога 12, выход которого соединен со вторым входом порогового элемента 11; кнопку сброса 15 интегратора 13, выход которой соединен со вторым входом сброса интегратора 13; устройство содержит также источник питания 16, выход которого соединен с энергетическим входом приемного блока 2.
Устройство для обнаружения местонахождения засыпанных биообъектов или их останков (фиг. 5) работает следующим образом.
Сигнал радиошума, сверхдлинноволнового диапазона естественного электромагнитного поля Земли (ЭМПЗ), наводимый на антенне 1, которая в рабочем положении, параллельном поверхности засыпанного участка, находится на высоте 1,5-2 м над насыпью и образует с землей (или снегом) электроемкость, поступает на вход приемного блока 2, которым является вход предварительного усилителя 3, согласованный по входному сопротивлению с антенной 1 и представляющий собой усилитель заряда. Напряжение с выхода предварительного усилителя 3, пропорциональное радиошумовым флуктуациям заряда антенной емкости, поступает на импульсный фильтр 4, который производит выделение одной гармонической составляющей шумового сигнала на фиксированной частоте в пределах диапазона сверхдлинных радиоволн. Величина этой частоты задается с выхода генератора 5 опорного сигнала и может изменяться ступенчато.
Сигнал гармонической составляющей с выхода импульсного фильтра 4 поступает на вход усилителя 6 переменного тока с большим коэффициента усиления (1000000 и более), в котором происходит усиление сигнала гармонической составляющей до насыщения усилителя 6. В результате этого на его выходе образуются прямоугольные импульсы постоянной амплитуды, частота и фаза которых равны частоте и фазе сигнала выделенной гармонической составляющей радиошума. Этот сигнал прямоугольной формы поступает на вход фазового детектора 7, на другой вход которого поступает сигнал с выхода генератора 5 опорного сигнала. На выходе фазового детектора 7 формируются прямоугольные импульсы, площадь которых пропорциональна разности фаз сигналов с выходов усилителя 6 и опорного генератора 5. Из выходной импульсной последовательности с выхода фазового детектора 7 выделяется среднее значение фильтром 8 нижних частот, напряжение на выходе которого пропорционально величине разности фаз. Это напряжение усиливается усилителем 9 постоянного тока (УПТ), на второй инвертирующий вход которого поступает регулируемое по величине постоянное напряжение с выхода блока компенсации 10. Это напряжение вычитается из напряжения разности фаз и результирующий сигнал поступает на пороговый элемент 11. Величина порога устанавливается напряжением с выхода блока 12 регулирования порога. Если величина сигнала с выхода УПТ 9 не превышает величины порога, установленного с блока 12 в элементе 11, то сигнал на выходе элемента 11 равен нулю. При превышении напряжением с выхода УПТ 9 величины порога элемента 11 происходит его передача на выход элемента 11 с линейным постоянным коэффициентом усиления. Сигнал с выхода порогового элемента 11 поступает на вход интегратора 13, осуществляющего его интегрирование, далее результирующий сигнал поступает на вход индикаторного элемента 14 и отображается. Сброс интегратора 13 осуществляется нажатием кнопки сброса 15.
При статической компенсации помехового фона при неподвижной антенне 1 в общем случае всегда существует некоторый фазовый сдвиг между выделенной и усиленной гармонической составляющей радиошума с выхода усилителя 6 и сигналом опорного генератора 5, следовательно, сигналы на выходе фазового детектора 7, фильтра нижних частот 8 и УПТ 9 не равны нулю. Чтобы произвести компенсацию устанавливают в блоке 12 регулирования порога такое напряжение на его выходе, чтобы порог элемента 11 был равен нулю. Затем устанавливают величину напряжения с выхода блока 10 компенсации такую, чтобы напряжение на выходе УПТ 9 было равно нулю при данном положении антенны 1. Контроль производят по индикатору 14, показывающему в этом случае интеграл разностного сигнала с выхода УПТ 9, периодически устанавливая в нуль интегратор 13.
При динамической компенсации помехового фона при передвижении антенны 1 над участком засыпанной территории, заведомо не содержащей биообъектов, неоднородности грунта, над которым перемещают антенну 1, вызывают отклонение фазы гармонической составляющей принимаемого сигнала радиошумов на выходе усилителя 6 от опорного сигнала с выхода генератора 5, в результате чего на выходе фазового детектора 7 наблюдаются импульсы, а на выходах фильтра 8 и УПТ 9 - ненулевое напряжение. Перемещая антенну 1, увеличивают напряжение, поступающее с блока 12 регулирования порога, вызывающее увеличение порога элемента 11 так, чтобы ни одна неоднородность участка, не содержащего биообъектов, не создавала разности фаз, превышающей величину порога, и сигнал на выходе элемента 11 оставался нулевым. При этом необходимо, чтобы величина порога элемента 11 незначительно превышала максимальную величину разности фаз, получаемую от неоднородностей на данном участке, чтобы не загрубить неоправданно высокую чувствительность устройства. Контроль также производят по индикатору 14, периодически обнуляя интегратор 13 с помощью кнопки 15 сброса, добиваясь стабильного нулевого показания индикатора 14 при любых перемещениях антенны 1 над участком, не содержащем биообъектов.
При рабочем перемещении антенны 1 в случае прохождения ее над скрытым в грунте биообъектом или его останками, в принимаемом сигнале радиошумов появляется фазовый сдвиг гармонической составляющей с выхода усилителя 6, значительно отличающийся от фазы опорного сигнала с генератора 5. При этом создается такая разность фаз, что напряжение на выходе фильтра 8 нижних частот и соответственно пропорциональное ему напряжение на выходе УПТ 9 превышает установленную при динамической компенсации помехового фона величину порога элемента 11. На выходе последнего появляется напряжение, при этом интегратор 13 интегрирует его и на выходе интегратора 13 наблюдается изменяющееся напряжение, которое продолжает изменяться при стабильном сохранении фазового сдвига. Это приводит к появлению и изменению напряжения на выходе интегратора 13 вплоть до входа его в насыщение даже при незначительных сколь угодно малых, но стабильных превышениях сигналом с выхода УПТ 9 величины порога элемента 11. Это в совокупности с возможностью обеспечения очень больших значений общего коэффициента усиления всего тракта позволяет в значительной степени повысить чувствительность устройства. Скорость изменения сигнала с выхода интегратора 13 при одинаковом составе объектов поиска характеризует глубину их залегания, которая может оцениваться качественно (типа "близко к поверхности", "глубоко" и т.д.).
В случае обозначения контура биообъекта после возвращения антенны 1 назад при выходе из контура биообъекта напряжение на выходе интегратора 13 перестает изменяться и стабилизируется на уровне, который был достигнут к моменту вывода антенны 1 за пределы контура биообъекта (запоминание). После этого интегратор 13 обнуляют нажатием кнопкой 15 и производят следующую проходку по направлению к биообъекту до новой фиксации его контура согласно способу и т.д.
Предлагаемый способ обнаружения местонахождения засыпанных биообъектов или их останков по сравнению с известными обладает следующими преимуществами:
значительно более широкими функциональными возможностями за счет дополнительно введенных операций, выполняемых в предложенной последовательности по предложенным условиям, т.к. позволяет применять его для поиска объектов при любых видах завалов - снежных, песчаных, горных, при землетрясениях, разрушениях и обвалах построек и т.д., в том числе происшедших неожиданным и непрогнозируемым образом;
малой зависимостью от количества и характера неоднородностей в засыпанном грунте, поскольку способ позволяет отстраиваться от помех подобного рода и проводить целенаправленную настройку на поиск биообъектов или их останков:
широкими эксплуатационными возможностями, удобством применения, поскольку не требует предварительного размещения на объектах поиска какого-либо оборудования;
не вносит никаких ограничений во время поиска, поскольку в связи с тем, что не требует размещения оборудования на объектах поиска, нет зависимости от конечного времени работы автономных источников питания;
высокой помехозащищенностью и чувствительностью за счет использования шума в качестве полезного сигнала, оценки его по электрической составляющей, применения фазовых измерений, являющихся сами по себе высоко помехозащищенными, а также за счет того, что функциональная развязка по операциям способа позволяет реализовать очень высокие значения коэффициентов усиления;
значительной простотой осуществления, дистанционностью и бесконтактностью с грунтом при поиске, что в значительной мере сокращает время поиска по сравнению с известными способами, что является чрезвычайно важным при поиске живых людей, где счет времени идет на часы и минуты;
возможностью бесконтактного поиска останков биообъектов пассивным путем без использования внешних излучений спустя год и более после засыпания любым грунтом, что не позволяет ни один из известных способов;
высокой точностью обнаружения биообъектов и их останков, позволяющей производить определение контуров проекций объектов поиска на поверхность грунта.
По сравнению с известными устройствами, в том числе прототипом, предлагаемое устройство для обнаружения местонахождения засыпанных биообъектов или их останков обладает следующими преимуществами:
значительно более широкими функциональными возможностями за счет введения дополнительных элементов, соединенных предложенным образом, позволяющих использовать устройство автономно независимо от характера биообъектов, их строения, а также независимо от типа, характера и происхождения насыпанного на них грунта;
значительно лучшими эксплуатационными характеристиками ввиду малых весогабаритных показателей, высокой степени автономности (возможно выполнение в виде ручного прибора), значительной простоте работы с предлагаемым устройством, не требующей какой-либо специальной квалификации;
высокой помехозащищенностью, благодаря чему не требуется экранирование, специальное заземление и т.д.
простотой конструкции, отсутствием дефицитных и дорогостоящих материалов и деталей, высокой степенью технологичности, что обеспечивает низкую себестоимость устройства и хорошую воспроизводимость его в массовом масштабе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2245733C1 |
| СПОСОБ ОЦЕНКИ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ БИООБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2118124C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ЗЕМНОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2426566C2 |
| СПОСОБ ГЕОЭЛЕКТРОМАГНИТНОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2119680C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2002 |
|
RU2202812C1 |
| СПОСОБ ЗАЩИТЫ ОТ ЭЛЕКТРОМАГНИТНЫХ АНОМАЛИЙ У ПОВЕРХНОСТИ ЗЕМЛИ | 1994 |
|
RU2118181C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434253C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369418C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327498C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260816C2 |




Изобретение предназначено для поисково-спасательных работ и может быть использовано для поиска засыпанных биообъектов или их останков в районах землетрясений, а также в альпинизме при поиске биообъектов. Способ основан на способности биологических объектов, в том числе их останков, независимо от времени их образования интенсивно искажать фазовые характеристики фонового электромагнитного поля Земли, имеющего характер шума с распределенным непрерывным спектром в диапазоне сверхдлинных радиоволн на определенных фиксированных частотах. При реализации данного способа устройством при прохождении антенны над скрытым объектом поиска на выходе усилителя постоянного тока появляется разностный сигнал, превышающий балансировочное напряжение с выхода блока компенсации, величина которого установлена при статической компенсации помехового фона, и величину порога элемента, установленную напряжением с выхода блока регулирования величины порога при динамической компенсации помехового фона. В результате этого интегратор начинает интегрировать, и напряжение на его выходе начинает резко изменяться вплоть до насыщения интегратора, что отображается на индикаторном элементе. Способ и устройство позволяют расширить функциональные возможности изобретения, улучшить их эксплуатационные характеристики и сократить время поиска. 2 с. и 7 з.п. ф-лы, 6 ил.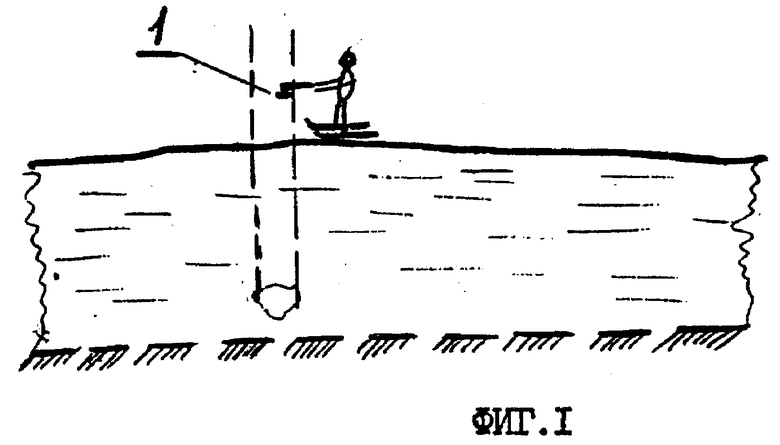
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Винокуров В.К | |||
| и др | |||
| Безопасность в альпинизме | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EP, заявка, 0075199, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

