Изобретение относится к автоматизированным системам сбора информации, в частности к системам с временным разделением каналов, используемым для сбора и оперативной обработки данных, получаемых от измерительных датчиков, например, датчиков радиационной загрязненности атмосферы.
Известно устройство сбора информации, содержащее блок ввода информации, блок формирования информации, блок выбора каналов и блок сопряжения с ЭВМ [1].
Недостатком данного устройства является ориентация его на сбор только дискретных данных, сопровождаемых синхроимпульсами.
Известна также система сбора, обработки и регистрации данных, ориентированная на обработку измерительной информации, представленной аналоговыми сигналами [2] . Эта система содержит блок сопряжения с датчиками, в котором измерительная информация с датчиков через аналоговый мультиплексор, управляющие входы которого подключены к регистру номера канала, аналого-цифровой преобразователь, буферный регистр данных и буфер внутренней магистрали поступает на магистраль сбора данных, к которой подключены таймер и блок предварительной обработки, связанный через главную магистраль с центральным блоком обработки, буферным запоминающим устройством, контроллером накопителя на магнитной ленте и контроллером дисплея.
Недостатки этой системы заключаются в ее малой гибкости при обслуживании большого количества измерительных датчиков и в низкой производительности из-за неэффективного использования вычислительной мощности входящих в ее состав средств обработки данных, значительная часть времени работы которых затрачивается на выполнение операций управления.
К тому же известные устройства не ориентированы на использование в их составе существующих комплексов технических средств, эксплуатируемых в сетях связи, в частности - оборудования квазиэлектронных автоматических телефонных станций (АТСКЭ).
Задачей данного изобретения является создание системы для сбора, преобразования и обработки измерительной информации, например, о радиационной загрязненности атмосферы, обеспечивающей отсутствие гальванической связи неопрашиваемых в данный момент датчиков с электрическими схемами блоков преобразования и передачи результатов измерений, отделение блоков, определяющих последовательность и периодичность опроса датчиков, от блоков управления процессом преобразования и передачи данных, а также высокой надежности работы системы при ее эксплуатации в необслуживаемом режиме.
Указанный технический результат достигается тем, что в систему сбора, преобразования и обработки измерительной информации, содержащую датчики, центральное устройство управления и обработки, коммутатор, блок управления коммутатором, аналого-цифровой преобразователь и канал ввода-вывода, связанный с центральным блоком управления и обработки, выходы датчиков соединены с соответствующими входами коммутатора, управляющий вход которого подключен к выходу блока управления коммутатором, а выход - к входу аналого-цифрового преобразователя, дополнительно введены k-1 коммутаторов, k-1 блоков управления коммутатором, k-1 аналого-цифровых преобразователя и два блока канала для связи с периферийным оборудованием, причем датчики разделены на k групп по n датчиков, все коммутаторы выполнены в виде полнодоступных и построенных, например, на ферридах, коммутаторов с n входами и n/2 выходами, выход каждого j-го датчика (j = 1 - n) m-й группы (m = 1 - k ) подсоединен к j-му входу m-го коммутатора, i-й выход (i = 1 - n/2) каждого (2r - 1)-го коммутатора (r = 1 - k/2) связан с входом (2i - 1)-го аналого-цифрового преобразователя, а i-й выход каждого 2r-го коммутатора - с входом 2i-го аналого-цифрового преобразователя, причем входы всех блоков управления коммутатором соединены с периферийными входами-выходами первого блока канала для связи с периферийным оборудованием, выход каждого из аналого-цифровых преобразователей подключен к соответствующему периферийному входу-выходу второго блока канала для связи с периферийным оборудованием, а канальные входы-выходы первого и второго блоков канала для связи с периферийным оборудованием подсоединены к каналу ввода-вывода.
На чертеже представлена блок-схема системы сбора, преобразования и обработки измерительной информации, выполненной согласно данному изобретению.
Система содержит k групп 1.1,...,1.k по n датчиков 2.1,...,2.n, k коммутаторов 3.1,...,3.k. k блоков 4.1,...,4.k управления коммутатором, k аналого-цифровых преобразователей (АЦП) 5.1,...,5.k, первый 6 и второй 7 блоки канала для связи с периферийным оборудованием, канал 8 ввода-вывода и центральное устройство 9 управления и обработки.
В качестве датчиков 2.1,...2.n могут быть использованы различные аналоговые измерительные датчики, например, измерители параметров физических величин, характеризующих уровень радиационной загрязненности атмосферы в различных точках контролируемой местности, то есть таких параметров, как интенсивность α,β и γ излучений.
АЦП 5.1,...,5.k могут быть выполнены в виде АЦП прямого преобразования.
Для реализации коммутаторов 3.1,...,3.k, блоков 4.1,...,4.k управления коммутатором, первого 6 и второго 7 блоков канала для связи с периферийным оборудованием, канала 8 ввода-вывода и центрального устройства 9 управления и обработки могут быть использованы серийные технические средства, входящие в состав оборудования АТСКЭ типа "Квант" (см. А.В.Буланов, И.Г.Козлова, Т.Г. Самхарадзе. Проектирование квазиэлектронных АТС типа "Квант". Часть 1. Общая характеристика, функциональные и коммутационные схемы. - М., ВЗЭИС, 1983 и А. В.Буланов, И.Г.Козлова, Т.Г.Самхарадзе. Управляющее устройство АТСКЭ типа "Квант". - М., ВЗЭИС, 1986).
Центральное устройство 9 управления и обработки представляет собой резервированный, синхронно работающий комплекс из двух ЭВМ, микропрограммные процессоры которых имеют четыре аппаратных уровня программы с глубиной ухода на подпрограмму, равной четырем на каждом уровне.
Структурно устройство 9 состоит из двух микропрограммных процессоров, блока ЗУ для каждого процессора, двух блоков начального запуска системы, канала межмашинного обмена, схем сопряжения с машинным периферийным оборудованием и пульта управления.
Канал 8 ввода-вывода обеспечивает передачу и согласование временных и электрических параметров сигналов, которыми обмениваются в процессе работы центральное устройство 9 и периферийные устройства управления, которыми в данной системе являются блоки 4.1,...,4.k управления коммутатором. Канал 8 осуществляет доступ обеих ЭВМ устройства 9 управления и обработки к периферийным устройствам управления, обеспечивая при этом их полную гальваническую развязку при двусторонней передаче информации через блок 6 канала. Второй блок 7 канала служит в данной системе только для односторонней передачи данных от АЦП 5.1,...,5.k.
Блоки 6 и 7 канала являются периферийной частью канала ввода-вывода и осуществляют переключение периферийных шин, взаимодействующих с каналом.
Каждый из коммутаторов 3.1,...,3.k выполнен в виде двухпроводного матричного ферридового соединителя. Важным преимуществом использования ферридовых соединителей является свойство ферридов размыкать контакты герконов при прохождении тока через одну его обмотку, что устраняет опасность двойных соединений, поскольку при этом автоматически обеспечивается возможность пребывания в рабочем состоянии только одного феррида в любой горизонтали и вертикали матричного соединителя. Это же свойство позволяет не иметь сигналов отбоя, что значительно упрощает процесс управления коммутатором.
Управление работой матричного ферридового соединителя осуществляется соответствующим блоком 4.1,...,4.k управления коммутатором, в составе каждого из которых имеется генератор колоколообразных импульсов, подключаемый к любой горизонтали и любой вертикали матричного ферридового соединителя.
Система сбора, преобразования и обработки измерительной информации работает следующим образом.
Периодичность и последовательность опроса датчиков 2.1,...,2.n групп 1.1,...,1.n задается программным путем.
В соответствии с командами, поступающими из устройства 9 по каналу 8 ввода-вывода блок 6 канала выполняет операцию выбора одного из блоков 4.1,.. . , 4. k управления коммутатором и передает в него данные о требуемом соединении в соответствующем коммутаторе 3.1,...,3.k. Выбранный блок управления коммутатором выполняет операцию по установлению соединения.
Это соответственно приводит к подключению выбранного датчика к одному или нескольким АЦП 5.1,...,5.k.
С установлением требуемых соединений аналоговые сигналы с опрашиваемых датчиков преобразуются АЦП 5.1,...,5.k, на выходах которых формируются коды, соответствующие величинам измеряемых датчиками параметрам.
Центральное устройство 9 через канал 8 ввода-вывода и второй блок 7 канала, работающий в режиме "Чтение" осуществляет сканирование и опрос АЦП 5.1, . ..,5.k и параллельное накопление в специально выделенной зоне памяти обеих ЭВМ измерительной информации. При этом идентификация поступающих данных, то есть установление принадлежности очередного элемента массива накапливаемых данных производится с помощью формируемых на этапе установления соединения таблиц, сохраняемых в памяти центрального устройства 9 и указывающих, какой из датчиков 2.1,...,2.n какой из групп 1.1,...,1k подключен к выходу опрашиваемого в данный момент АЦП.
После окончания цикла опроса АЦП 5.1,...,5.k или параллельно с опросом, если это позволяет производительность АВМ, центральное устройство 9 производит обработку первичной информации.
При этом использование имеющегося в устройстве 9 канала межмашинного обмена позволяет осуществлять достаточно эффективный контроль работоспособности двухмашинного комплекса за счет сравнения в канале межмашинного обмена результатов работы обеих ЭВМ.
Для выявления неисправностей периферийного оборудования, то есть коммутаторов 3.1,...,3.k, блоков 4.1,...,4.k управления коммутатором и АЦП 5.1. , . . . , 5. k, данная система позволяет при использовании соответствующего программного обеспечения, аналогичному используемому в АТСКЭ типа "Квант", осуществлять оперативное изменение соединений и анализ происходящих при этом изменений принимаемых в центральное устройство 9 данных. В частности, для проверки АЦП 5.1,...,5.k достаточно через определенные интервалы времени подсоединять два или три АЦП к одному и тому же датчику. Сравнение выходных данных этих АЦП позволяет при их несовпадении выявить наличие неисправности в одном из двух АЦП, а при троировании - определить неисправный АЦП и программным путем исключить его использование при сохранении возможности дальнейшей работы системы.
Изобретение относится к автоматизированным системам сбора информации, в частности к системам с временным разделением каналов, используемым для сбора и оперативной обработки данных, получаемых от измерительных датчиков, например радиационной загрязненности атмосферы. Техническим результатом является создание системы, обеспечивающей отсутствие гальванической связи неопрашиваемых в данный момент датчиков с электрическими схемами, блоков преобразования и передачи результатов измерений, отделение блоков, определяющих последовательность и периодичность опроса датчиков, от блоков управления процессом преобразования и передачи данных, а также высокой надежности работы системы при ее эксплуатации и необслуживаемом режиме. Система сбора, преобразования и обработки измерительной информации содержит k групп по n датчиков, k коммутаторов, k блоков управления коммутатором, k аналого-цифровых преобразователей, два блока канала связи с периферийным оборудованием, канал ввода-вывода и центральное устройство управления и обработки. 1 ил.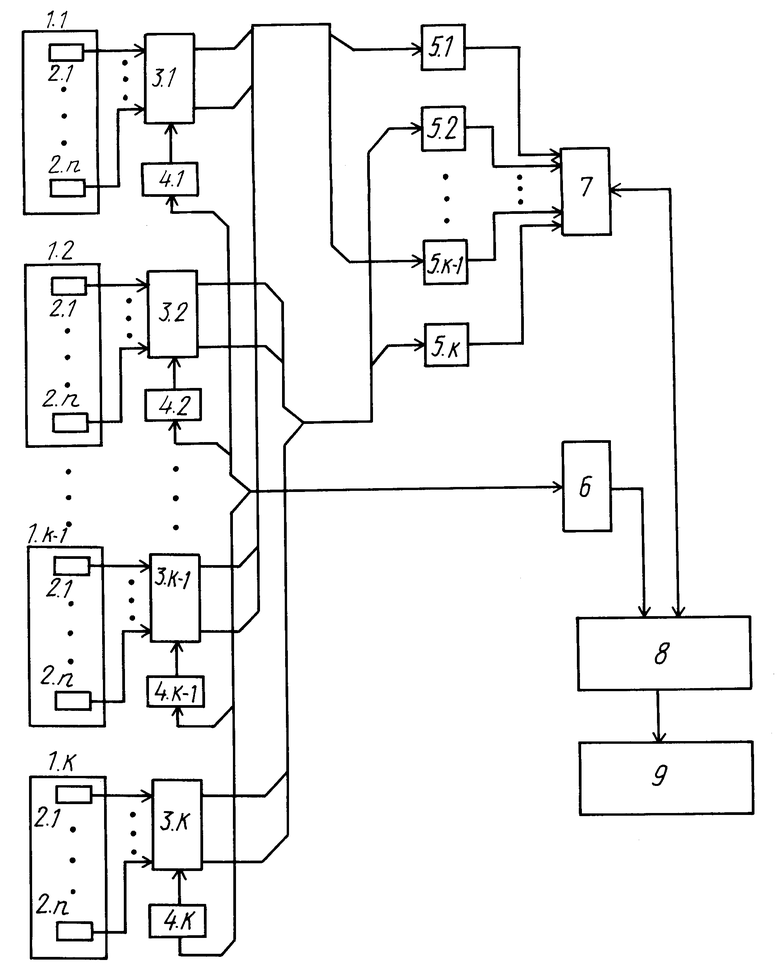
Система сбора, преобразования и обработки измерительной информации, содержащая датчики, центральное устройство управления и обработки, коммутатор, блок управления коммутатором, аналого-цифровой преобразователь и канал ввода-вывода, связанный с центральным блоком управления и обработки, выходы датчиков соединены с соответствующими входами коммутатора, управляющий вход которого подключен к выходу блока управления коммутатором, а выход - к аналого-цифровому преобразователю, отличающаяся тем, что в систему дополнительно введены (k - 1) коммутаторов, (k - 1) блоков управления коммутатором, (k - 1) аналого-цифровых преобразователей и два блока канала для связи с периферийным оборудованием, причем датчики разделены на k групп по n датчиков, все коммутаторы выполнены в виде полнодоступных и построенных, например, на ферридах коммутаторов с n входами и n/2 выходами, выход каждого j-го датчика (j = 1, ..., n) m-й группы (m = 1, ..., k) подсоединен к j-му входу m-го коммутатора, i-й выход (i = 1, ..., n/2) каждого (2r - 1)-го коммутатора (r = 1, ..., k/2) связан с входом (2i - 1)-го аналого-цифрового преобразователя, а i-й выход каждого 2r-го коммутатора - с входом 2i-го аналого-цифрового преобразователя, причем входы всех блоков управления коммутатором соединены с периферийными входами-выходами блока канала для связи с периферийным оборудованием, выход каждого из аналого-цифровых преобразователей подключен к соответствующему периферийному входу-выходу второго блока для связи с периферийным оборудованием, а канальные входы-выходы первого и второго блоков для связи с периферийным оборудованием подсоединены к каналу ввода-вывода.
| SU 1769211 A1, 15.10.92 | |||
| SU 760105 A1, 30.08.80 | |||
| Устройство сбора информации | 1987 |
|
SU1481802A1 |
| Буланов А.В | |||
| и др | |||
| Проектирование квазиэлектронных АТС типа "Квант" | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Общая характеристика | |||
| Функциональные и коммутационные схемы | |||
| - М.: ВЗЭИС, 1983, с.12-19 | |||
| Фремке А.В | |||
| Телеизмерения | |||
| - М.: Высшая школа, 1975, с.177, рис.5.14 | |||
| Шевкопляс Б.В | |||
| Микропроцессорные структуры | |||
| - М.: Радио и связь, 1986, с.12, рис.2.1 | |||
| Денисов А.Г | |||
| и др | |||
| Ферриды | |||
| - М.: Информэлектро, 1972, с.4. | |||
