Изобретение относится к системам подавления побочного изображения, использующих фильтры с бесконечной импульсной характеристикой (IIR), и в частности к устройству, обеспечивающему устойчивое функционирование IIR фильтра в такой системе.
Система подавления побочного изображения обычно состоит из двух частей: программируемого фильтра и схемы для расчета модели канала передачи сигнала. Схема моделирования канала воспринимает переданный опорный сигнал и хранящийся в памяти эталонный опорный сигнал, определяя тем самым характеристики передающего канала (в частности характеристики, которые могут способствовать усилению многолучевого искажения). Используя такие характеристики, схема моделирования канала формирует коэффициенты для программирования программируемого фильтра, для того чтобы обеспечить прохождение сигнала с существенным подавлением многолучевого искажения. Более детальное описание способов моделирования канала можно посмотреть, например, в патенте США N 4 864 403, зарегистрированном 5 сентября 1989 года под названием "Adaptive Television Jhost Concellation System Including Filter Circuitry with Non. Integer Sfmple Delay" или GHOST REDUCTION BY REPRODUCTION by n. Komlya, IEEE Transactions on Consumer Electronics, Aug, 1992, Vol 38, No. 3, pp. 195 - 199. Программируемые фильтры обычно бывают двух типов: с конечной импульсной характеристикой (FIR) и бесконечной импульсной характеристикой (IIR). В некоторых системах подавления побочного изображения используют FIR фильтры, в других - IIR фильтры, но в большинстве систем используется сочетание обоих фильтров.
Как IIR, так и FIR фильтры для подавления побочного изображения используют линию задержки с ответвлениями, которая обеспечивает получение множества задержанных друг относительно друга сигналов. Задержанным сигналам присваиваются веса с помощью программируемых коэффициентов и весовые коэффициенты комбинируются, обеспечивая отфильтрованный выходной сигнал. FIR и IIR фильтры имеют по отношению друг к другу преимущества и недостатки, но хорошо известно, что FIR фильтрам присуща устойчивость, а в случае с IIR фильтрами с устойчивостью возникают проблемы. Настоящее изобретение направлено на устранение неустойчивости в системах подавления побочного изображения, которые используют фильтры подавления побочного изображения типа IIR.
Настоящее изобретение представляет собой систему подавления побочного изображения, включающую IIR фильтр подавления побочного изображения и схему моделирования канала для генерирования отводимых весовых коэффициентов, необходимых для программирования фильтра подавления побочного изображения. Схема для моделирования канала включает средство вычисления суммы значений всех сгенерированных весовых коэффициентов. Если сумма превышает заданное значение, указывая на неустойчивость IIR фильтра, весовые коэффициенты соответствующим образом масштабируются так, чтобы уменьшить сумму, стремясь таким образом уменьшить вероятность неустойчивости фильтра.
На фиг. 1 представлена структурная схема системы подавления побочного изображения, включающая настоящее изобретение.
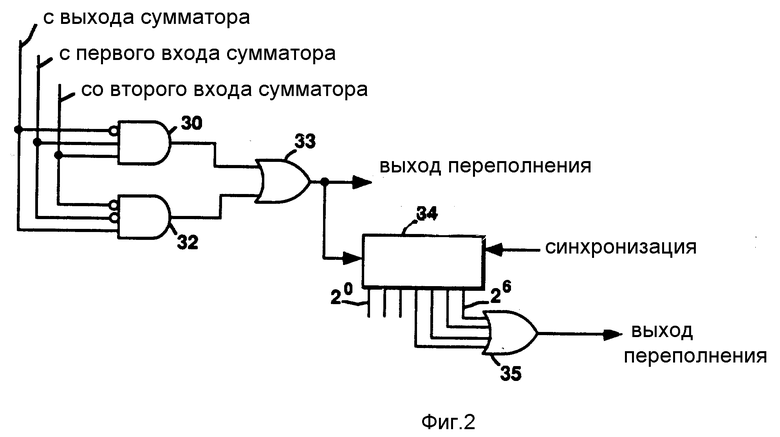
На фиг. 2 представлена логическая схема детектора переполнения с поразрядным дополнением до двух, который может быть установлен в устройстве на фиг. 1.
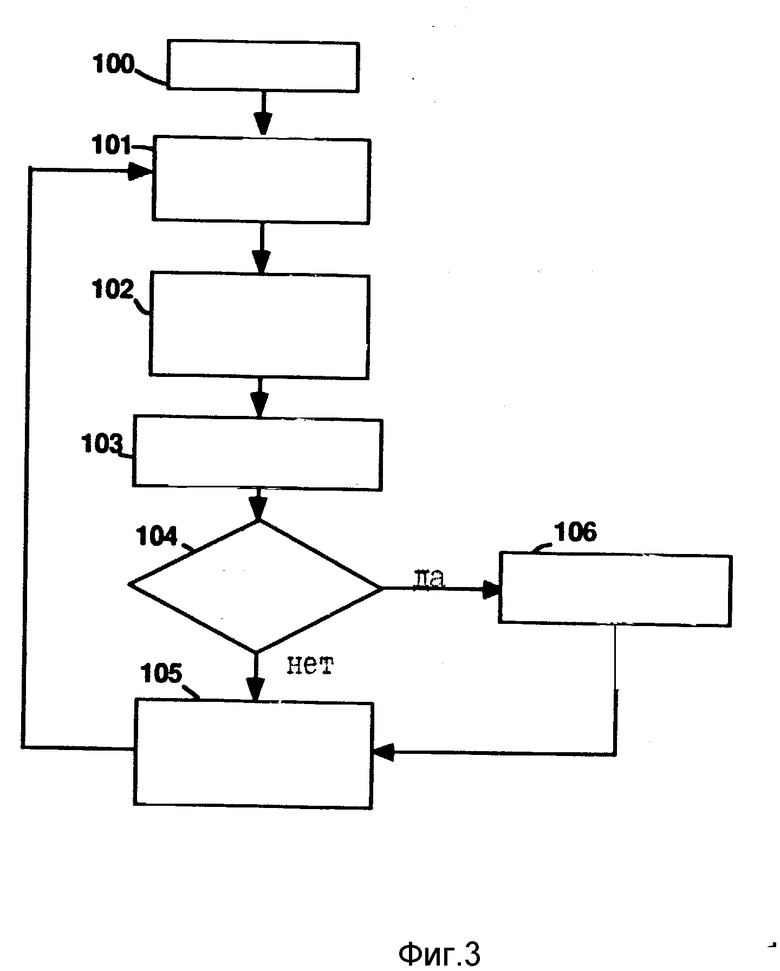
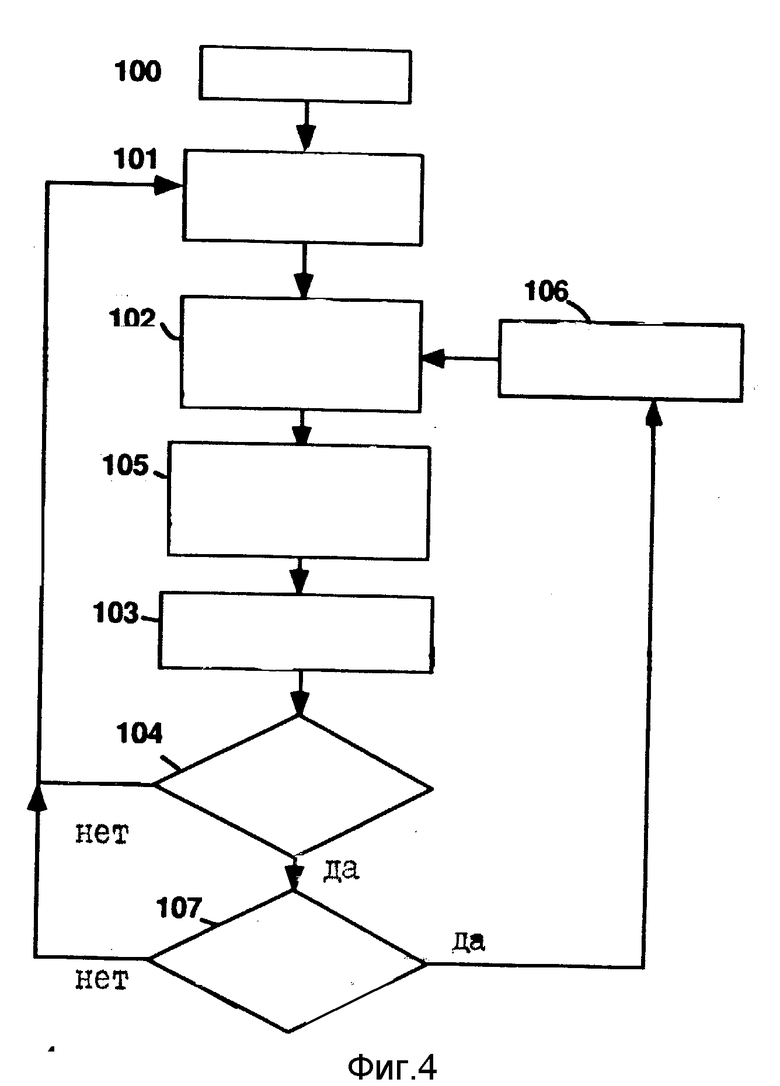
Фиг. 3 и 4 представляют собой блок-схемы функционирования системы на фиг. 1.
Аппаратура для генерирования весовых коэффициентов для системы подавления побочного изображения достаточно хорошо известна специалистам, поэтому такая аппаратура здесь в деталях описываться не будет. Достаточно сказать, что типовая аппаратура для генерирования весовых коэффициентов включает специализированные программируемые микропроцессоры, которые можно запрограммировать для выполнения множества алгебраических функций.
Поэтому считаем, что специалистам по реализации аппаратуры для генерирования весовых коэффициентов не составит труда запрограммировать подобную аппаратуру для выполнения простых арифметических преобразований с однажды сформированными весовыми коэффициентами.
Обратимся к фиг. 1, где элементы 10 - 18 образуют базовую структуру известной системы подавления побочного изображения, в которой используются IIR фильтры подавления побочного изображения. Входной сигнал подается на шину 10, например, от системы антенна/тюнер. Входной сигнал подводится к блоку моделирования канала и управления 18, который реагирует на опорный сигнал подавления побочного изображения, включаемый на регулярно заданных интервалах во входной сигнал для генерирования весовых коэффициентов, которые подаются к фильтру подавления побочного изображения. Фильтр подавления побочного изображения состоит из сумматора 12, линии задержки с отводами 14, множества весовых схем 15 и сумматора 16. Входной сигнал подводится к сумматору 12, выход которого соединен с входом линии задержки с отводами. Сдвинутые по времени друг относительно друга копии сигнала, поступившего на вход линии задержки, получают доступ на соответствующие отводы и им присваиваются веса посредством значений коэффициентов, сгенерированных в блоке моделирования канала 18. Копии с присвоенными весами суммируются в сумматоре 16, результирующая сумма подается на второй вход сумматора 12. Если допустить, что весовые коэффициенты вычислены точно, то сигнал от сумматора 16, подаваемый ко второму входу сумматора 12, будет включать комбинацию составляющих, необходимых для подавления любого многолучевого искажения, попавшего во входной сигнал. Следует отметить, что, поскольку сигнал, подающийся обратно от сумматора 16, вводится для подавления составляющих входного сигнала, сумматор 12 может в действительности быть реализован как вычитатель. Реализован ли блок 12 как сумматор или как вычитатель зависит от соответствующих полярностей, присвоенных соответствующим весовым коэффициентам.
Для IIR фильтров подавления побочного изображения установлено, что если сумма всех значений весовых коэффициентов, присвоенных IIR фильтру подавления побочного изображения, больше единицы, то фильтр может стать неустойчивым. Для фильтров с тактированными элементами задержки устойчивость может быть предсказана посредством разложения передаточной функции фильтра и выявления наличия полюсов на комплексной плоскости, имеющих значение больше нуля. Устойчивость, в частности, зависит также от изменяющегося динамического диапазона входного сигнала и фиксированного динамического диапазона аппаратуры обработки. В телевизионных системах динамический диапазон принимаемых телевизионных сигналов различается от канала к каналу, поэтому IIR фильтр подавления побочного изображения может быть неустойчивым для одного, но устойчивым для другого канала.
В первом варианте реализации изобретения IIR фильтр подавления побочного изображения выполнен как безусловно устойчивый. В этом варианте реализации устройство управления и моделирования канала настроено для функционирования в соответствии с блок-схемой, показанной на фиг. 3. Устройство управления и моделирования канала, реагирующее на горизонтальную и вертикальную синхронизирующие составляющие входного сигнала, принимает (101) опорный сигнал подавления побочного изображения (GCR), содержащийся в канале 21 видеосигнала. Используя полученный GCR и хранящуюся эталонную версию GCR, рассчитываются (102) весовые коэффициенты для программирования IIR фильтра подавления побочного изображения, чтобы устранить побочные изображения, принимаемые в канал. Значения весовых коэффициентов суммируются (103), и результирующая сумма сравнивается с единицей (104). Если сумма меньше единицы, весовые коэффициенты подаются (105) на соответствующие весовые схемы IIR фильтра. Если сумма больше единицы, соответствующие весовые коэффициенты масштабируются (106) для уменьшения суммы коэффициентов.
Коэффициент масштабирования может иметь вид 1/(αS), где S - сумма весовых коэффициентов, а α - коэффициент, меньше или равный единице, но ближе к единице, например, 0,95. Коэффициент α можно сделать независящим от S и выбрать так, чтобы αS было бы не меньше, чем заранее заданное значение, например, 1.1. После того как весовые коэффициенты промасштабированы, они подаются (105) к соответствующим весовым схемам фильтра.
Весовые коэффициенты могут быть комплексными величинами, если фильтр подавления побочного изображения установлен для обработки квадратурных составляющих входного сигнала. В этом случае можно суммировать значения комплексных составляющих, чтобы уменьшить требования к аппаратуре. Положим, что коэффициенты C имеют вид
Ci = Xi + jYi.
Сумма коэффициентов определяется как
Использование этого значения для суммы имеет строгое ограничение, поскольку оно всегда будет превышать сумму действительных значений 
Как было упомянуто выше, только из-за того, что сумма значений весовых коэффициентов превышает единицу, фильтр необязательно будет неустойчивым. Если неустойчивость отсутствует и коэффициенты масштабированы, подавление побочного изображения отчасти будет ухудшено. Таким образом, когда сумма значений весовых коэффициентов превышает единицу, желательно масштабировать эти коэффициенты, только если фильтр проявляет тенденцию к неустойчивости. Весовые коэффициенты используются для программирования фильтра, даже если их сумма превышает единицу, а затем фильтр проверяется на неустойчивость, и если неустойчивость обнаружена, коэффициенты масштабируются. Функционирование в этом режиме представлено блок-схемой на фиг. 4. Следует отметить, что функционирование, показанное на фиг. 4, допускает итеративное возрастающее масштабирование коэффициентов, до тех пор пока не будет устранена неустойчивость фильтра.
Один из методов определения тенденций к неустойчивости IIR фильтров заключается в контролировании сумматора 12 на предмет переполнения или потери значимости. Переполнение или потеря значимости появляется, например, в схемах поразрядного дополнения до двух, если две величины с одинаковой полярностью, поданные на входы сумматора, суммируются, и величина суммы будет больше той, которая может быть представлена в выходных битах сумматора. Аппаратура на фиг. 1 включает детектор переполнения/потери значимости 20. Детектор переполнения/потери значимости генерирует выходной сигнал, указывающий на переполнение/потерю значимости, который подается в схему моделирования канала и управления 18. Схема 18, восприняв сигнал, указывающий на переполнение/потерю значимости, масштабирует сгенерированные весовые коэффициенты, чтобы уменьшить сумму значений весовых коэффициентов. Заметим, что схема 18 может быть настроена так, чтобы автоматически масштабировать весовые коэффициенты, если их сумма превышает заранее заданную величину, большую единицы, и соответствующим образом масштабирует весовые коэффициенты, определяя переполнение/потерю значимости, если сумма коэффициентов больше единицы, но меньше заранее заданного значения.
Сумматор 16 может также выдавать переполнение/потерю значимости частичных сумм. Однако эти переполнения/потери значимости не будут влиять на устойчивость фильтра. Поэтому нет необходимости контролировать этот сумматор на предмет переполнения/потери значимости для обеспечения устойчивости фильтра. Однако переполнения/потери значимости, выявленные в сумматоре 16, могут повлиять на точность выполнения подавления побочного изображения. Так, при выполнении вышеописанной системы желательно контролировать сумматор 16 на предмет появления переполнения/потери значимости и в ответ на них масштабировать весовые коэффициенты. В этом случае коэффициент масштабирования может отличаться от того, который использовался при переполнении/потери значимости сумматора 12.
На фиг. 2 показан вариант детектора переполнения/потери значимости, который можно устанавливать в системах с поразрядным дополнением до двух. Эта схема реагирует на знаковые биты выборок, подаваемых на вход сумматора, и знаковый бит результата, полученного посредством сумматора. Переполнение возникает, когда две положительные входные величины образуют отрицательную выходную величину, а потеря значимости возникает тогда, когда две отрицательные входные величины образуют положительную выходную. Появление этих двух состояний выявляется с помощью двух логических элементов И (30, 32) и одного логического элемента ИЛИ (33). В системах с поразрядным дополнением до двух положительные числа имеют значение знаковых битов, равные логическому нулю, а отрицательные числа - логической единице. Определение состояния переполнения осуществляется логическим элементом И 32, на неинвертирующий вход которого подается выходной знаковый бит сумматора, а на соответствующие инвертирующие входы подаются два входных знаковых бита сумматора. Подобным же образом выполняется определение потери значимости посредством второго логического элемента И 30, к инвертирующему входу которого подводится выходной знаковый бит сумматора, а к соответствующим неинвертирующим входам подводятся два входных знаковых бита сумматора. Логические элементы 30 и 32 выдают логические сигналы высокого уровня на своих соответствующих выходах только при появлении переполнения или потери значимости соответственно. Выходы логических элементов И 30 и 32 подсоединены к соответствующим входам логического элемента ИЛИ 33, который обеспечивает появление на своем выходе сигнала комплексной проверки переполнения/потери значимости.
Сигнал переполнения/потери значимости, выдаваемый логическим элементом ИЛИ 33, можно непосредственно подать на схему 18 для управления масштабированием коэффициентов. Однако единичные появления переполнения/потери значимости не могут служит точным индикатором неустойчивости фильтра. Следовательно, желательно обработать выходной сигнал логического элемента ИЛИ 33, прежде чем подать на схему 18. Пример обработки сигнала переполнения/потери значимости показан на фиг. 2. В этом примере выход логического элемента ИЛИ 33 подсоединен к счетному входу двоичного счетчика 34. Вертикальная составляющая синхронизирующего сигнала подводится к точке сброса счетчика и с началом каждого интервала поля кадра сбрасывает счетчик в нуль. Таким образом счетчик 34 подсчитывает количество появлений переполнений/потерь значимости на каждом периоде поля кадра. Значащие биты более высоких разрядов счетчика 34 подводятся к соответствующим входам логического элемента 35, например биты 23 - 26. Логический элемент ИЛИ 35 выдает выходной сигнал переполнения/потери значимости всякий раз, когда появляется 8 или более указаний на переполнение/потерю значимости, обеспечиваемых логическим элементом ИЛИ 33 в течение интервала поля кадра. Другой пример обработки сигнала переполнения/потери значимости может включать получение сигнала переполнения/потери значимости только после того, как появилось заранее заданное количество указаний на переполнение/потерю значимости для следующих друг за другом выборок на интервале поля кадра.
Система подавления побочного изображения включает БИХ фильтр подавления побочного изображения и схему моделирования канала для генерирования на ее отводах весовых коэффициентов для программирования БИХ фильтра подавления побочного изображения. Схема моделирования канала включает средство для расчета суммы всех значений сгенерированных весовых коэффициентов. Если сумма превышает заранее заданное значение, указывая тем самым на неустойчивость БИХ фильтра, весовые коэффициенты соответствующим образом масштабируются, чтобы уменьшить эту сумму, уменьшая таким путем вероятность неустойчивой работы фильтра. Технический результат заключается в повышении устойчивости. 2 с. и 7 з.п.ф-лы, 4 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Красовский А.А | |||
| и др | |||
| Основы автоматики и технической кибернетики | |||
| - М | |||
| - Л.: Госэнергоиздат, 1962, с.217-222 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 4127874 A, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент, 4344089 A, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US, патент, 4864403 A, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

