Изобретение относится к перегрузочной технике и может быть использовано при создании грузозахватов-манипуляторов к погрузчикам общего назначения для перегрузки различных пакетированных грузов, например, на разовых поддонах, в термоусадочной пленке в пакетирующих стропах и других грузов, удерживаемых способом "на подхват", а также для бочек при установке двух механических захватов.
Известны грузозахваты к погрузчику, содержащие механизм бокового смещения, навешиваемые на подъемную каретку погрузчика и используемые, как правило, со стандартными вилочными подхватами. Например, навесные приспособления типа ПГ (1.10, 1.16, 1.20) Хомяковского опытно-экспериментального механического завода [1], а также приспособление с механизмом бокового перемещения фирмы "Тойота" [2].
Наиболее близким аналогом (прототип) заявляемого устройства является вилочный захват к погрузчику по авт.свид. СССР N 1011496, В 66 Г 9/12, 1983. Указанный грузозахват содержит вид рабочих органов - вилы для контейнеров с плодоовощной продукцией, основание с направляющими, которое навешивается на подъемную каретку погрузчика и привод. Известное устройство является объектом узкого назначения, вилы выполнены монолитными со специальным контуром и соединены непосредственно с направляющими основания и штоками гидроцилиндров.
Задачей, на решение которой направлено заявляемое изобретение, является значительное расширение функциональных возможностей, использование грузозахвата для перегрузки разных грузов, включая возможность использования парных рабочих органов для одного грузового места с различными вариантами и совмещениями их движений.
При этом будет получен следующий технический результат:
- значительно расширятся виды перегружаемых грузов;
- станут более удобными и ускорятся операции по захватыванию и укладке различных грузов, что позволит увеличить производительность перегрузочных работ.
Заявляемый грузозахват, как и прототип, содержит рабочие органы, основание с направляющими, которое навешивается на подъемную каретку погрузчика. В отличие от прототипа грузозахват содержит две одинаковые отдельные части - полуплиты для навешивания сменных рабочих органов для разных грузов, причем эти полуплиты неразъемно соединены с ползунами, с помощью которых они имеют возможность скольжения по продольным пазам направляющих посредством раздельных гидроприводов и с возможностью совмещения их движения.
Сущность изобретения поясняется чертежами, где на фиг 1-4 представлены соответственно:
на фиг. 1 - грузозахват к погрузчику - (общий вид) без сменных рабочих органов, с условной гидравлической схемой и вариантами движений;
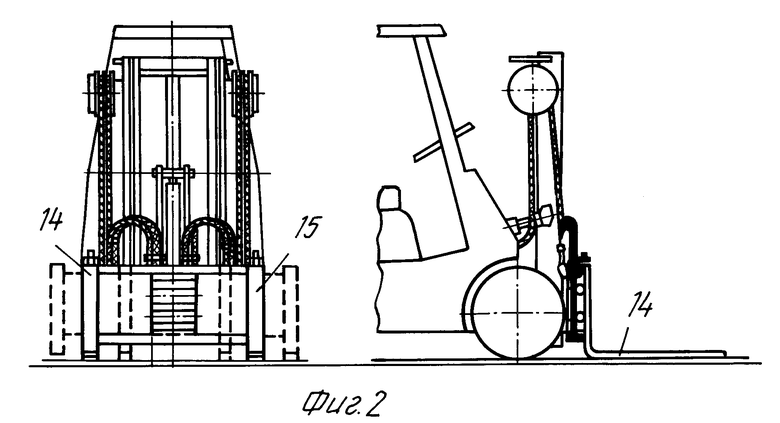
на фиг. 2 - грузозахват с вилами, каждая на отдельной полуплите (виды спереди и сбоку);
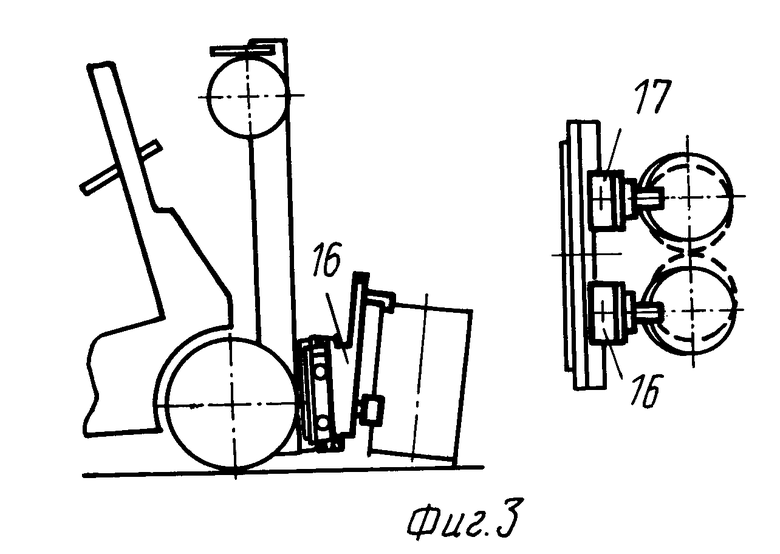
на фиг. 3 - грузозахват с механическими захватами для бочек, каждый на отдельной полуплите (вида сбоку и сверху);
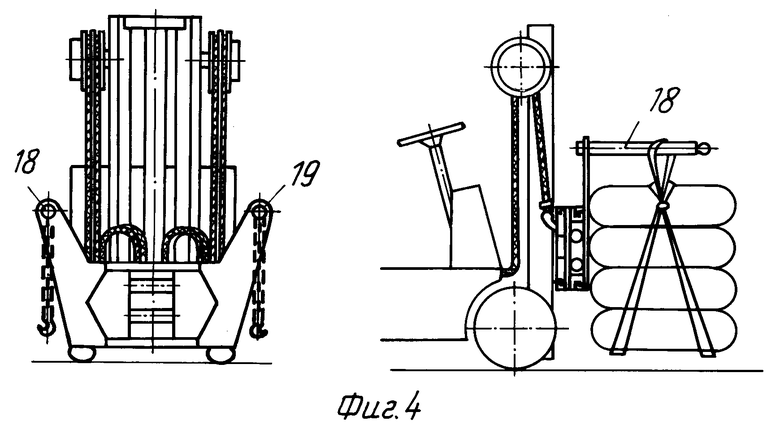
на фиг. 4 - грузозахват со штырями для пакетов в пакетирующих стропах, каждый на отдельной полуплите (виды спереди и сбоку).
Грузозахват к погрузчику состоит из основания 1, навешиваемого на подъемную каретку погрузчика, направляющих 2, неразъемно соединенных (сваренных) с основанием 1. По продольным пазам направляющих 2 скользят, с помощью ползунов 3, две отдельные одинаковые полуплиты 4 и 5, неразъемно соединенные с ползунами 3. По присоединительным размерам полуплиты выполнены в соответствии со стандартами ISO, благодаря чему на них можно навешивать стандартные вилы и другие, выполненные присоединительными размерами ISO рабочие органы.
Раздельный привод каждой полуплиты состоит из гидроцилиндра двойного действия 6 и 7 и трехпозиционного четырехлинейного гидрораспределителя 8 и 9, соответственно соединенных трубопроводами 10 и 11. Гидрораспределители 8 и 9 подключаются к общей гидравлической системе погрузчика (насосу - 12, баку - 13).
Грузозахват к погрузчику работает следующим образом. На каждую отдельную полуплиту 4 и 5 навешивается один рабочий орган (или один рабочий комплект), например, стандартные вилы 14 и 15, или механические захваты для бочек 16 и 17, или комплект рабочих органов для пакетов в пакетирующих стропах 18 и 19 и другие рабочие органы, кроме указанных в примерах.
Подъехав к грузу, водитель, манипулируя раздельно или совместно рукоятками 20 и 21 гидрораспределителей, устанавливает каждый рабочий орган в самое удобное для захватывания груза положение. Возможность восьми различных раздельных и совмещенных вариантов движений указаны на фиг. 1 стрелками.
Захватив груз, водитель, пользуясь возможными движениями рабочих органов, может заранее привести груз в наиболее удобное для транспортирования и дальнейшей укладки положение. Например, захватив, благодаря возможным раздельным движениям, две бочки, стоящие на расстоянии друг от друга, он может их сдвинуть вплотную друг к другу (фиг. 3, показано пунктиром) и рационально уложить их в тесных помещениях транспортных средств (вагонах, контейнерах, трюмах).
При укладке груза совмещенными движениями можно осуществить боковое смещение для плотной укладки груза.
Пользуясь раздельным движением штырей можно облегчить и ускорить их заводку и выведение из петель пакетирующих стропов (фиг.4), при захвате и укладке пакетов.
Приведенные примеры иллюстрируют новые функциональные свойства заявляемой конструкции грузозахвата с двумя подвижными одинаковыми отдельными полуплитами для навешивания сменных рабочих органов для разных грузов.
Источники информации:
1. Комплект навесных приспособлений к погрузчикам. Изготовитель - Хомяковский опытно-экспериментальный завод. Рекламный проспект, Внешторгиздат. Изд. N 7511 MB, 1990 г.
2. Инструкция по вилочному автопогрузчику фирмы "Тоета" типа 02-ЗГД40FSVAUE, стр.21 и 22.
Тоета мотор сейре к.о., ЛТД, 1982 г. Издано в Японии В R 5120-1.
3. Авт.свид.СССР, SU N 1011496A, В 66 F 9/12 1983 г. Бюл. N 14 (прототип).
Изобретение относится к погрузочной технике и может быть использовано для перегрузки различных пакетированных грузов. Техническим результатом от использования изобретения является расширение функциональных возможностей грузозахвата. Сущность изобретения: грузозахват к погрузчику содержит рабочие органы, основание с направляющими, которое навешивается на подъемную каретку погрузчика. Грузозахват содержит две одинаковые отдельные части - полуплиты для навешивания сменных рабочих органов для разных грузов, причем эти полуплиты неразъемно соединены с ползунами, с помощью которых они имеют возможность скольжения по продольным пазам направляющих посредством раздельных гидроприводов и с возможностью совмещения их движения. 4 ил.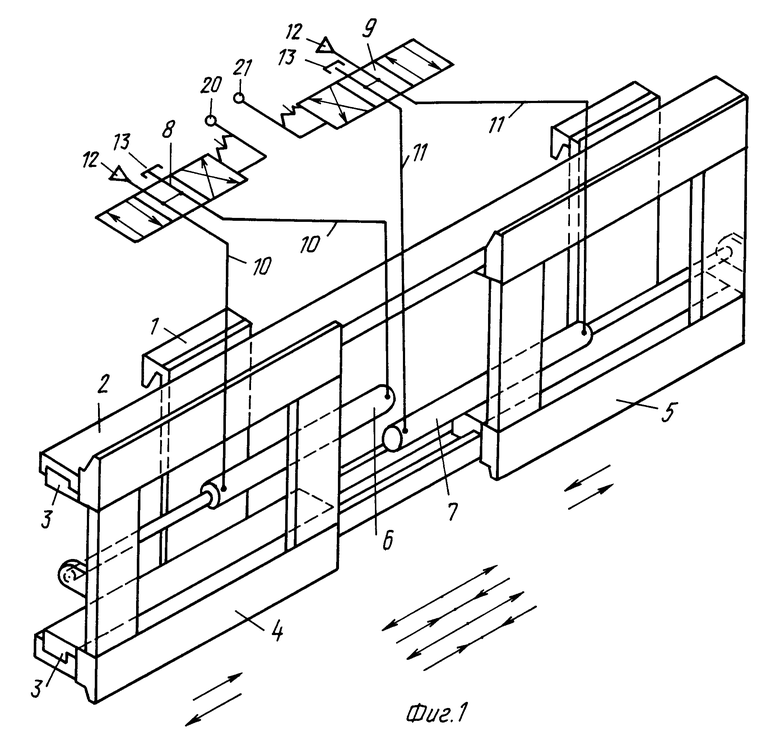
Грузозахват к погрузчику, содержащий рабочие органы, основание с направляющими, которое навешивается на подъемную каретку погрузчика, отличающийся тем, что грузозахват содержит две одинаковые отдельные части - полуплиты для навешивания сменных рабочих органов для разных грузов, причем эти полуплиты неразъемно соединены с ползунами, с помощью которых они имеют возможность скольжения по продольным пазам направляющих посредством раздельных гидроприводов и с возможностью совмещения их движения.
| SU, 413917 A, 05.02.74 | |||
| SU, 1279946 A, 30.12.96 | |||
| SU, 1611844 A1, 07.12.90 | |||
| SU, 1782932 A1, 23.12.92 | |||
| SU, 981202 A, 15.12.82 | |||
| SU, 737356 A, 30.05.80 | |||
| SU, 419470 A, 15.03.74 | |||
| SU, 658081 A, 25.04.79 | |||
| US, 4556359 A, 14.02.86 | |||
| SU, 1011496 A, 15.04.83. |

