Изобретение связано с подвижными радиосистемами и более детально касается систем автоматического контроля мощности для использования в них.
Термин подвижная радиосистема, который используется здесь, подразумевает системы, имеющие базовую станцию в обоюдной радиосвязи с множеством переносных, транспортабельных или подвижных радиоединиц.
Показано, что в элементарных подвижных радиосистемах можно получить повышение производительности системы через использование автоматического контроля мощности передающих подвижных станций (здесь упоминается для простоты как "контроль мощности"). Он снижает передаточную мощность до абсолютного минимума, чтобы получить приемлемые коммуникации. Минимум мощности для данной подвижной станции есть функция как характеристик его радио линии, так и помех на базовой станции, с которой поддерживается связь.
Известные системы контроля мощности используют контрольную связь подачи питания, в которой имеется требуемая мощность самым подходящим образом, сигнализируя от базовой станции к подвижным станциям способность подвижных станций установить правильный уровень мощности. Такая система будет работать хорошо, поддерживая большое количество пользователей, если не будет превышать допустимой производительности системы в любое заданное время. Однако, когда эта производительность превышена, наступает механизм неустойчивости во всех системах контроля мощности.
Этот механизм возникает, как будет описано далее, при формировании позитивного цикла поддержки питания, включающего по крайней мере две базовых станции и по крайней мере две подвижных, одна из которых оперативно связана с каждой из базовых станций и на том же или подобном канале частоты, на котором базовая станция принимает сигнал от двух или более подвижных станций. Таким образом, к необходимому сигналу от одной подвижной станции добавляется по крайней мере еще один сигнал, принимаемый от другой подвижной станции, который воспринимается как шум.
Цель этого изобретения предложить систему автоматического контроля мощности, в которой вышеупомянутый недостаток устраняется или по крайней мере облегчается.
Согласно настоящему изобретению система автоматического контроля мощности для подвижных радиосистем содержит контрольный центр, через который связаны множество базовых станций, чтобы облегчить обоюдную связь между подвижными станциями, которые получают доступ к системе через базовые станции, подвижные станции подготовлены к передаче, в добавлении к коду идентификации, уникальному для каждой подвижной единицы, имеют последовательность данных, общую для каждой подвижной станции, но передаваемую каждой неподвижной станцией в номинально различное время в пределах каждого включения, каждая базовая станция, включая в себя средства корреляции, производит распознавание сигналов от подвижных единиц в пределах своего радиуса действия (который подвижные станции распознают с помощью своего кода идентификации), и, перемешивая сигналы от подвижных станций на соседних базовых станциях, имеется накопитель данных, который служит для хранения результатов корреляции, куда детали соответствующих уровней мощности и времен приема записываются, если они относятся к принятым сигналам, контрольный центр, имея сигнальный процессор, соответствующий накопителю данных на каждой базовой станции для идентификации подвижных станций, вовлеченных в потенциальные ситуации обоюдных помех, передает необходимые инструкции базовым станциям, которые посредством контроля мощности передаются на подвижные станции.
Пока центр контроля расположен во владении данных, принадлежащих сигналам, принятым базовыми станциями от подвижных станций, связанных с базовыми, и которые могут быть обоюдными помехами, как отмечается при сравнении уровней мощности и соответствующих времен, измерения контроля мощности могут быть эффективны при устранении или по крайней мере минимизации обоюдных помех.
Последовательность данных может быть случайной по времени и связана с базовой станцией посредством подвижной станции, с которой поддерживается связь.
Последовательность данных может быть псевдослучайной по времени и предопределена в пространстве, которое заранее известно обеим базовым станциям и подвижным, с которыми они связаны.
В рассматриваемой системе схема избежания столкновений может быть приведена в исполнение, поскольку базовая станция инструктирует одну или более подвижных, как двигается, если существует проблема потенциальной обоюдной помехи.
В схеме обхода препятствий может быть использована система замещения данных, поскольку данные, поврежденные обоюдными помехами, выявляются и заменяются на правильные из предыдущего включения.
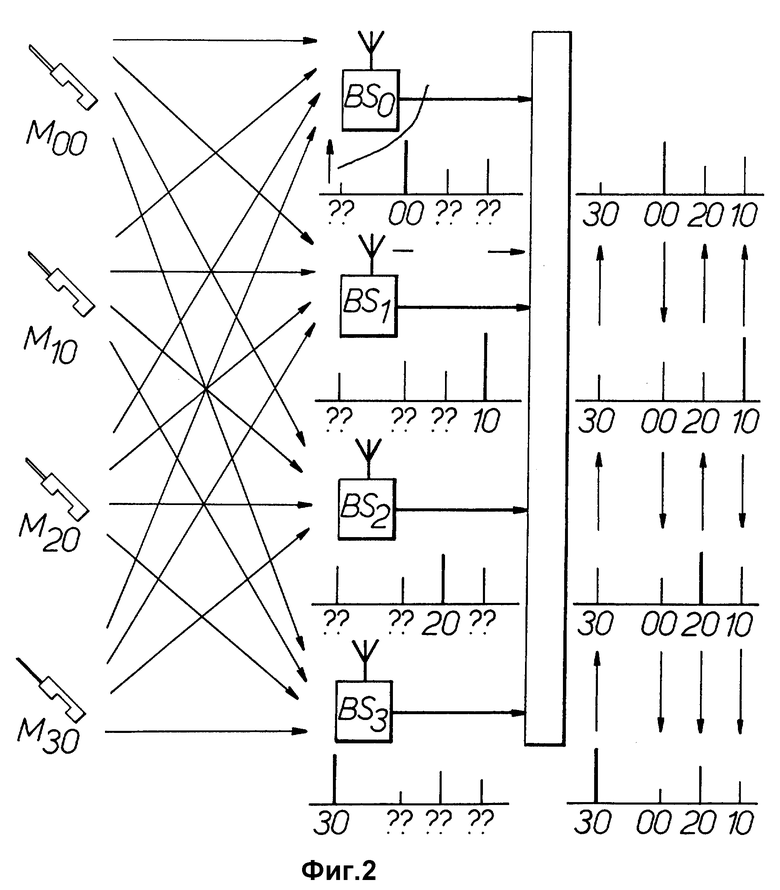
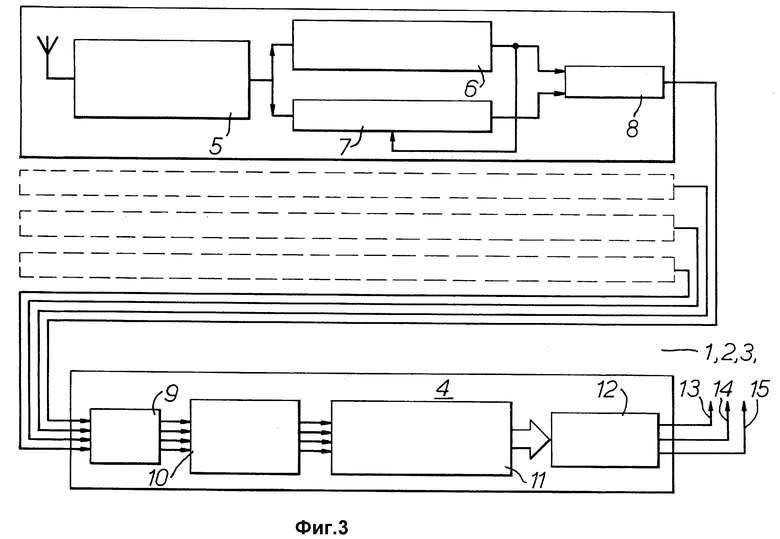
На фиг. 1 показана схематическая диаграмма, иллюстрирующая условия нестабильности; на фиг. 2 - диаграмма, представляющая сигнал, проходящий между подвижными станциями, связанными с различными базовыми станциями; на фиг. 3 - блок схема системы, представленной данным изобретением.
Ссылаясь на фиг. 1 - 3, существующие системы контроля, мощности могут использовать контрольную связь подачи питания, в которой требуемая мощность установлена самым подходящим образом, а именно: передавая сигнал от базовой станции к подвижной и тем самым давая ей возможность установить правильный уровень мощности. Такая система будет работать хорошо, обеспечивая большое количество активных пользователей, не превышая допустимой производительности системы в любой момент времени. Однако, если это произойдет, существует тенденция нестабильности во всех системах контроля мощности. Лучше всего это можно понять в терминах именно двух базовых станций и двух подвижных станций, где одна подвижная присоединена к одной базовой станции, а другая подвижная соединена с другой базовой станцией, как показано на фиг. 1.
Подвижная станция 0 присоединена к базовой станции 0 и подвижная станция 1 к базовой станции 1. Lej путь достижения (противоположное значение пути потери) от подвижной станции, соединенной с базовой станцией l к базовой станции j. Легко показать, что если обе базовые станции требуют, чтобы отношение сигнала к помехе было равно R, то мощность будет возрастать до максимального возможного значения, если
Качественно это условие появляется, когда возможно удовлетворить требованиям обеих подвижных станций одновременно.
Рассмотрим случай, когда подвижная станция 0 активирована, а подвижная станция 1 требует доступа. Предыдущее уравнение предлагает средства проверки, следует ли соглашаться с требованием подвижной станции 1. Если левая сторона уравнения меньше единицы, то следует сделать это. Однако выполнение такой проверки требует знания всех величин Lej.
В более реалистичном сценарии, содержащем много подвижных и базовых станций, применяется более сложное уравнение, но тем не менее эквивалентное предыдущему. Оно опять же требует знания всех существенных Lej для каждой подвижной станции. В самом деле требуется более общая переменная, называемая Lemj, которая обозначает путь достижения m /тым/ подвижной станцией, соединенной с базовой станцией l базовой станции j. Для подвижной станции m, соединенной с базовой станцией j, отношение Lemj/Leme препятствует соединению между базовыми станциями l и j, присоединенными к данной подвижной станции.
Смысл данного изобретения предложить практические средства выполнения данных измерений и предпринять подходящие действия в зависимости от результатов для того, чтобы избежать нестабильности под действием обоюдных помех.
Желательно во все времена для активных подвижных станций иметь новые значения величин Lemj. Система может стать нестабильной, если либо новая подвижная станция с большим количеством пересекающихся связей активизируется, либо одна или более существующих активных станций переместятся в новые места так, что недопустимо увеличится количество пересекающихся связей.
Итак, очевидно, что требуются регулярные измерения для активных подвижных станций, а также измерения величин для новых подвижных станций, чтобы проверить возможно ли присоединение.
Каждая активная подвижная станция соединена с базовой станцией и настроена на передачу данных на эту базовую станцию. В данном изобретении сделано предположение, что передача данных производится дискретными порциями и что эти порции содержат последовательность известных данных в целях синхронизации, оценок, канала и др. Приемник на базовой станции, соответствующий специальной подвижной станции, будет выполнять корреляцию по известной последовательности данных, чтобы выполнить необходимые временные, а также функции оценки канала. Значение корреляции предлагает оценку мощности, принимаемой от данной подвижной станции. Так, для передачи мощности Mem на подвижную станцию мы можем легко получить соответствующее измерение Leme от подвижной станции m до базовой l (позже мы убедимся, что нет необходимости получать величину Mem. Если базовые станции, окружающие базовую станцию l, также проводят корреляцию для известной последовательности, передаваемой подвижной станцией m, они также могут оценить силу принятого сигнала из величины измеряемого пика корреляции. Далее, значение Mem может допустить определение Lemj для j базовой станции. Однако, поскольку нам требуется только величина Lemj/Leme, нет необходимости определять Mem.
Пока описанный выше подход в принципе возможен, он не может быть слишком привлекательным, требуя на каждой базовой станции отдельный коррелятор для каждой подвижной станции, которая может значительно мешать этой базовой станции. Это требует не только большего количества аппаратуры, но и значительные транспортные средства в сети, соединяющей базовые станции, чтобы информировать тех, которых назначил коррелятор.
Важной чертой данного изобретения является условие, что все подвижные станции передают ту же самую последовательность данных, но в различные моменты времени внутри включения. Каждая базовая станция нуждается только в одном быстром корреляторе, который произведет измерения пика корреляции для всех подвижных станций со значительной энергией помех.
Пик, соответствуя любым подвижным станциям, связанным со специальной базовой станцией, будет определен с помощью той самой базовой станции, собственными средствами которой пик был обнаружен. С этой точки зрения, каждая базовая станция способна получить измерения принимаемой мощности для многих подвижных станций, но определить идентичность только тех подвижных станций, которые связаны через нее. Эта информация, однако, может быть получена через сопоставление времен пиков корреляции, когда информация собирается в центре переключения, как показано на фиг. 1.
Согласно фиг. 2 каждая базовая станция (от 0 до 3) имеет только одну активную подвижную станцию. Подвижные станции передают свои последовательности известных данных в различное время, и каждая из базовых станций работает в соответствии с этими известными данными. Для каждой базовой станции существует одна подвижная станция с известным идентификатором, который дает возможность базовой станции распознавать собственные подвижные уникально. Для подвижных станций, связанных с другими базовыми станциями, все, что известно, так это уровень сигнала и время приема. Это иллюстрируется отображением каждой станции. Вся эта информация пересылается через сеть, которая связывает базовые станции с контрольным центром переключения. Этот контрольный центр переключения может быть на одной из базовых станций или может быть специальным центром переключения. Информация, пересылаемая в контрольный центр, содержит время достижения каждого из сигнальных пиков, величину сигнальных пиков и идентичность известных сигналов, что специально проиллюстрировано на изображении под каждой базовой станцией.
В центре контроля или точнее сбора различные источники данных выравниваются по времени, используя абсолютные измерения времени, или с помощью образца, отмечающего пик. Легко понять, как знание на одной базовой станции идентичности пика подвижной станции может быть использовано для определения идентичности пиков, соответствующих тем же самым подвижным станциям на других базовых станциях. Так, в правой стороне фиг. 2 оценки уравнения были заменены с помощью корректного тождества полученного с другой стороны базовой станции (вертикальные стрелки показывают поток информации). Получение тождества один раз позволяет вычислить все отношения  используя измерения.
используя измерения.
Когда требуется активация новой подвижной станции, ее параметры должны быть измерены. Это требуется, поскольку передача данных с помощью подвижной станции сопровождается опасностью нестабильности. Новая подвижная станция оценивает подходящую мощность, необходимую для передачи (путем измерения затухания передачи), и посылает порцию сигнала известной последовательности, но без данных. Таким образом, если новая подвижная станция не может быть принята в сеть, только небольшой порыв может произойти. В идеале, любые ошибки, которые генерируются при приеме от активной подвижной станции при передаче известной последовательности новой подвижной станцией, могут быть откорректированы в дальнейшем. Мощность новой подвижной станции не контролируется при передаче этой известной последовательности. Подвижная станция может прилагать идентификатор для своей принимающей базовой станции для присоединения так, чтобы она могла распознать, требует ли новая подвижная станция присоединения к базовой станции. Поскольку параметры для новой станции были получены, тест на стабильность может быть проведен, чтобы определить, может ли быть дан доступ для новой подвижной станции.
Время передачи известной последовательности может быть случайным, псевдослучайным или скоординированным.
В случае случайного времени подвижная станция принимает случайное решение, в какую точку в передаче данных помещать известную последовательность. Она полагается на базовую станцию, чтобы распознать специфический идентификатор подвижной станции. Здесь данный идентификатор необходим, чтобы иметь данные дешифровки в точном месте в порции данных, в которую включена известная последовательность так, чтобы данные могли быть правильно переданы. Это случайное расположение может быть получено так часто или нечасто, как система потребует определения. Максимальная скорость одна на порцию данных.
В случае псевдослучайного времени подвижная станция выбирает, по-видимому, случайно место для включения известной последовательности данных. В этом случае нет необходимости для подвижной станции информировать базовую станцию о расположении, поскольку она в состоянии определить его сама из локальной версии псевдослучайного расположения генератора. Скорость передачи в этом приближении имеет тот же потенциал гибкости, что и в предыдущем случае.
В случае скоординированного времени каждая базовая станция использует информацию о столкновениях между пиками корреляции для сообщения своим подвижным станциям, как изменить расположение, чтобы разделить пики.
Не имеет значения которая из представленных схем используется, возможность столкновений между пиками должна быть относительно низка. Особенно пики должны иметь низкую способность выделения меньше, чем дифференциальная проходимость, которая задерживается неопределенно. Это происходит по двум причинам.
Во-первых, различные карты времени, генерируемые на каждой базовой станции, могут иметь неопределенное по времени окно вокруг каждого корреляционного пика, зависимое от неопределенной задержки проходимости. Пики могут появляться в различные времена в этих окнах для различных базовых станций. Если только пики для различных подвижных станций не разделены и по крайней мере по ширине окна, может возникнуть неоднозначность в восприятии идентичности подвижной станции.
Во-вторых, поскольку это изобретение используется в элементарных системах с большими скоростями распространения, либо известной последовательности, либо для данных, либо и то и другое (непосредственно спектр распространения последовательности), поэтому может возникнуть значительная задержка распространения по многим путям. Измерение мощности сигнала может ввести суммирование многих решений различных компонент. Если пики от двух подвижных станций разделяются по времени неадекватно, то пики от двух подвижных станций можно скомбинировать как от одной.
Схемы случайного или псевдослучайного расположения предпочтительны на почве простоты. Если случайное расположение используется, возможно приспособить параметры системы так, что очень маловероятно, чтобы передачи от специальных подвижных станций содержали наложения двух удачных порций передачи. Наложения могут быть легко обнаружены, так как они будут появляться как только две базовые станции принимают свои подвижные станции, потому что порции известной последовательности с временным разделением меньше, чем окно неопределенной задержки. В этом случае могут быть использованы величины параметров, полученные ранее.
Рассмотрим фиг. 3, которая иллюстрирует архитектуру для четырех базовых станций, соединенных с общим контрольным центром 4 (центром переключения подвижных станций). Каждая из станций 1, 2, 3 видоизменяет сигнал и проводит нормальную обработку, применяемую к элементарным коммуникациям подвижных станций в метке 5, которая должна быть хорошо известна тем, кто хорошо разбирается в технике. К тому же выполняются функции коррелятора 6 известной последовательности, идентификатора сигнала 7 и накопителя данных 8. Известная последовательность, передаваемая подвижными станциями, коррелируется в корреляторе 6. Как только известная последовательность достигает порога корреляции, начинает работать идентификатор сигнала 7. Если с помощью идентификации последовательности для подвижной станции найдена известная последовательность (как в этом примере), то считается, что подвижная станция относится к базовой станции и ее данные обрабатываются. Отметим, что блок 5, называемый "RF обработка и обработка основной связи", содержит память, которая способна принимать измененные данные, полученные прежде приемником известной последовательности и идентификатором. К тому же, чтобы идентифицировать пик, другие неидентифицируемые пики должны быть обнаружены. Амплитуды и времена приема их передаются на накопитель 8 для каждой базовой станции. В конце каждой передачи данные, находящиеся на накопителе каждой станции, пересылаются в контрольный центр 4 от всех базовых станций 1, 2, 3.
Контрольный центр 4 состоит из следующих последовательно соединенных блоков обработки данных: блок выравнивания по времени 9, блок проведения перекрестной идентификации 10, блок 11 для вычисления фактора объединения пересечений и блок 12, вычисляющий устойчивость. Блок 9 выравнивает данные по времени, либо используя абсолютные временные метки для данных (это возможно, если станции точно синхронизированны), либо используя образец сравнения пиков времени для различных данных от различных базовых станций.
Далее, известная индификация производится в блоке 10, для неизвестной используются временное сравнение. Наконец, факторы, соединяющие пересечения и вычисление стабильности производятся в блоках 11 и 12. Эта информация передается на соответствующие базовые станции 1, 2, 3 как требуется через линии 13, 14 и 15 соответственно.
Следует признать, что можно произвести различные модификации со специальным приспособлением, описанным выше, без отступления от поля действия изобретения, как легко заметить при ближайшем рассмотрении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ | 1993 |
|
RU2110892C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 1996 |
|
RU2137150C1 |
| РАДИОПРИЕМНИК ПРЯМОГО ПРЕОБРАЗОВАНИЯ | 1995 |
|
RU2175463C2 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА СОТОВОЙ СВЯЗИ | 1998 |
|
RU2211535C2 |
| АДАПТАЦИЯ МОЩНОСТИ В МНОГОСТАНЦИОННОЙ СЕТИ | 1998 |
|
RU2210863C2 |
| СПОСОБ ПОДТВЕРЖДЕНИЯ ПРИЕМА ДАННЫХ | 2002 |
|
RU2292656C2 |
| ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ УСОВЕРШЕНСТВОВАННОГО КОНТРОЛЬНОГО СИГНАЛА | 2008 |
|
RU2470493C2 |
| РАНДОМИЗАЦИЯ ВЫДЕЛЕНИЯ РЕСУРСА | 2009 |
|
RU2497223C2 |
| КОДЫ СКРЕМБЛИРОВАНИЯ ДЛЯ ВТОРИЧНЫХ КОДОВ СИНХРОНИЗАЦИИ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2008 |
|
RU2450480C2 |
| CИСТЕМА СЛЕЖЕНИЯ ЗА ТРЕКЕРАМИ, СПОСОБ НАБЛЮДЕНИЯ И ОХРАНЫ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВ КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА | 2009 |
|
RU2516706C2 |
Элементарная подвижная радиосистема, в которой применяется контроль мощности и в которой измерения относительных путей затухания связей между базовой станцией и подвижными используются для расчета условия стабильности. В такой системе подвижные станции приспособлены к передаче общей известной последовательности (позывных) в различные времена, а базовые станции приспособлены в соответствии с этой последовательностью в продолжении всего периода передач измерять уровни сигналов от всех подвижных станций внутри радиуса действия, что является техническим результатом. Базовые станции хранят уровни и времена приема. Данные собираются через сеть, соединяющую базовые станции с общей точкой. В этой общей точке расчеты времен пиков приема сигнала неизвестных подвижных станций сравниваются с теми, что распознаны на других базовых станциях, чтобы идентифицировать подвижную станцию, связанную с каждым корреляционным пиком. 4 з.п. ф-лы, 3 ил.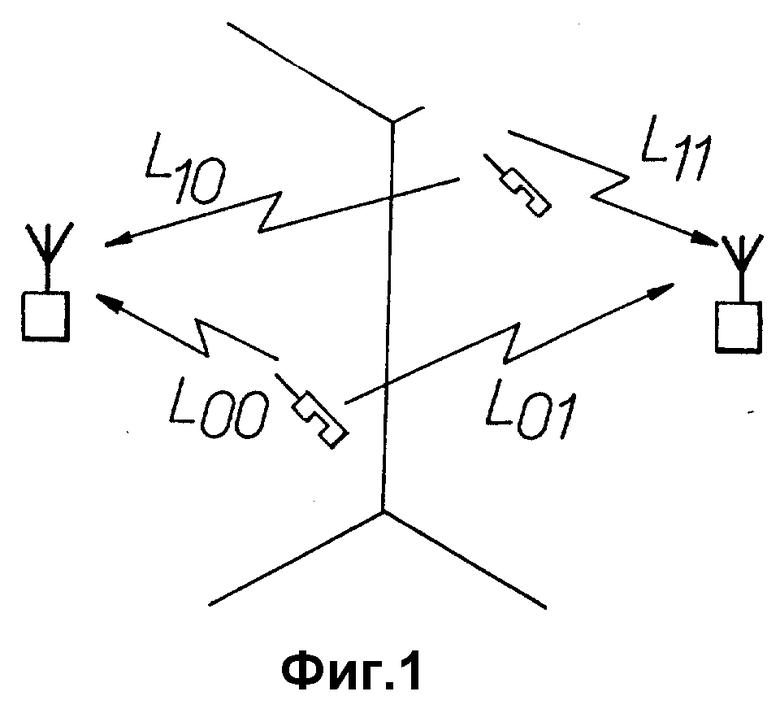
| Способ получения защитной атмосферы в пламенных печах | 1974 |
|
SU482503A1 |
| Устройство для автоматизированного контроля радиостанции | 1986 |
|
SU1401628A1 |
