Изобретение относится к системе определения положения, использующей радиосигналы или другие радиоинформационные передачи, а более точно - к системе, использующей глобальную систему мобильной связи (GSM), или к другим системам передачи цифровой информации.
В европейском патенте EP-B-0303371 раскрыта система радионавигации и слежения, в настоящее время известная под названием "Курсор" ("Cursor"), которая использует пространственную когерентность сигналов от нескольких радиопередатчиков с обеспечением определения положения подвижного приемника. Принципы действия этой системы раскрыты в описании, где показано, как сигналы, принимаемые непосредственно подвижным приемником (приемником подвижного объекта), сравниваются с сигналами, принимаемыми неподвижной базовой станцией с известным местоположением, для определения их разности фаз, и следовательно, разности расстояний от базы и подвижного объекта до каждого передатчика. Три таких измерения, выполняемых для независимых передатчиков, необходимы для навигации и слежения по двум координатам для определения положения подвижного объекта относительно базовой станции и сети передатчиков. Неизвестными величинами, рассчитываемыми для каждого нового положения, являются пространственные x и у координаты подвижного объекта наряду с фазовым сдвигом между сигналами локальных генераторов в аппаратуре двух приемников. В следующей заявке на патент WO 94128432 показано, как те же принципы можно применять в туннелях и других экранированных участках типа подземных автостоянок. Авторы Duffett-Smith и Woan ("Journal of Navigation", т. 45, стр. 157, 1992) описывают конкретное воплощение системы с измерением фазы, в которой амплитудно-модулированные сигналы от трех или более средневолновых общественных радиостанций используют для того, чтобы отслеживать положение транспортных средств в Кембридже, Великобритания, и вблизи него, при скоростях до 110 км/час и с точностью приблизительно 5 м. Одно из преимуществ такой системы заключается в том, что нет никакой необходимости создавать дополнительную дорогостоящую инфраструктуру когерентных радиопередатчиков для функционирования системы радионавигации и слежения "Курсор". Напротив, "Курсор" способен использовать сигналы из любых независимых радиопередатчиков, установленных для любой цели.
В Европейском патенте EP-B-0303371 раскрыто, как могут использоваться широкополосные сигналы модулированных радиоинформационных передач для измерения разницы во времени между сигналами, принимаемыми из каждого передатчика базовой станции и из подвижного объекта. В этом случае положение пика кросс-корреляционной функции можно использовать в качестве оценки разницы во времени между двумя принятыми сигналами, и следовательно разницу в расстоянии от базы и от подвижного объекта. Как и в случае системы с измерением фазы, трех таких измерений, выполненных для трех далеко отстоящих друг от друга передатчиков, достаточно для вычисления пространственных x и у координат подвижного объекта наряду с временным сдвигом между генераторами двух приемных станций.
Для мобильных телефонов все в большей степени используется глобальная система мобильной связи GSM и другие цифровые технические средства, и было бы выгодно добавить технологию позиционирования системы радионавигации и слежения "Курсор" с временным измерением, чтобы обеспечить дополнительные услуги для абонентов. Однако сигналы, излучаемые передатчика и цифровых телефонов, сложны. Существуют проблемы, которые должны быть преодолены, если объединить технологии.
В основу настоящего изобретения поставлена задача создания системы определения положения, которая могла бы представить дополнительные услуги для абонентов.
Согласно изобретению предложена система определения положения по принимаемым широкополосным сигналам, передаваемым радиопередающими источниками, число которых равно по меньшей мере числу координат, по которым должно отслеживаться перемещение подвижного объекта, содержащая:
две приемные станции, причем первая из приемных станций находится в известном местоположении, а вторая расположена на подвижном объекте,
процессор определения положения,
средство для пересылки сигнала связи от каждой из приемных станций в процессор определения положения, причем сигнал связи содержит информацию о сигналах, принятых на приемной станции из радиопередающих источников,
при этом каждая из приемных станций предназначена для практически одновременного приема сигналов из соответствующих радиопередающих источников, а процессор определения положения предназначен для сравнения информации, принимаемой от одной приемной станции, о сигналах, принятых на этой приемной станции от радиопередающих источников, с информацией, принимаемой от другой приемной станции, о сигналах, принятых на другой приемной станции от радиопередающих источников, и для определения временной задержки между соответствующими сигналами, принятыми на обеих приемных станциях для определения положения подвижного объекта.
Приемные станции могут принимать сигналы из соответствующих радиопередающих источников последовательно и в той же самой последовательности, в какой они передаются.
Настоящее изобретение также включает способ определения положения подвижного объекта, который заключается в том, что осуществляют передачу широкополосного сигнала из радиопередающих источников в количестве, равном по меньшей мере числу координат, по которым должно отслеживаться перемещение подвижного объекта, принимают сигналы на двух приемных станциях, первая из которых находится в известном местоположении, а вторая располагается на подвижном объекте, причем каждую из приемных станций настраивают для практически одновременного приема сигналов из соответствующих радиопередающих источников, пересылают сигналы связи от каждой из приемных станций в процессор определения положения, причем сигналы связи содержат информацию о сигналах, принятых на соответствующих приемных станциях от радиопередающих источников, сравнивают информацию, принимаемую в процессоре определения положения от одной приемной станции о сигналах, принятых на этой приемной станции от радиопередающих источников, с информацией, принимаемой от другой приемной станции, о сигналах, принятых на другой приемной станции от радиопередающих источников и определяют временную задержку между соответствующими сигналами, принятыми на обеих приемных станциях, для определения положения подвижного объекта.
Дополнительно, изобретение включает способ оценки временного сдвига при приеме сигнала радиовещания, принимаемого в двух местоположениях, в случае, когда сигнал, принятый в некотором местоположении, возможно подвержен искажению эффектами многолучевого распространения радиосигналов, который заключается в том, что осуществляют автокорреляцию сигналов, принятых в одном местоположении, и автокорреляцию сигналов, принятых в другом местоположении, осуществляют кросс-корреляцию сигналов, принятых в одном и другом местоположениях, затем производят построение эталонного графика, содержащего ту часть автокорреляции сигналов, принятых в другом местоположении, которая соответствует отрицательной оси времени, и ту часть автокорреляции сигналов, принятых в первом местоположении, которая соответствует положительной оси времени, измеряют сдвиг, при котором эталонный график лучше всего аппроксимирует измеренную кросс- корреляцию сигналов, принятых в одном и другом местоположениях, в качестве оценки временного сдвига между сигналами, принятыми в двух местоположениях.
В некоторых системах каждую из приемных станций также настраивают для приема второго сигнала из одного или более передатчиков, причем второй сигнал используют для обеспечения компенсации изменений в аппаратурных сдвигах во время приема последовательно принимаемых сигналов.
Процессор определения положения может быть расположен вместе с одной из приемных станций или на расстоянии.
В одном из вариантов воплощения сигнал связи от одной из приемных станций посылают к другой приемной станции и от другой приемной станции к процессору определения положения.
Для локации предпочтительно, чтобы сигнал, обеспечивающий информацию о положении подвижного объекта, посылали из процессора определения положения по меньшей мере к одной из приемных станций.
Система может дополнительно содержать одну или более отслеживающих станций, и сигнал, обеспечивающий информацию о положении подвижного объекта, можно тогда посылать из процессора определения положения в одну или более отслеживающих станций.
С целью обеспечения расширенных функциональных возможностей сервер базы данных может быть связан с процессором определения положения, причем сервер базы данных содержит элементы данных, касающиеся множества известных положений, а система дополнительно содержит средство для пересылки информации о положении подвижного объекта, определяемом процессором положения, в сервер базы данных, средство для восстановления элементов данных, связанных с положением, определяемым процессором определения положения, и средство для пересылки элементов данных в одну из приемных станций или в одну или более из отслеживающих станций.
Каждая приемная станция или каждая отслеживающая станция предпочтительно включает дисплей, и положение подвижного объекта отображается на дисплее, который может быть точечным матричным дисплеем.
Сервер базы данных может содержать графическую информацию, и эту графическую информацию посылают в приемную станцию или отслеживающую станцию и отображают на дисплее для указания положения подвижного объекта.
Радиопередающие источники и приемные станции предпочтительно содержат компоненты цифровой сети сотовой телефонной связи типа сети глобальной системы мобильной связи GSM. Выгодно, если приемные станции контролируют интенсивность сигналов из многочисленных радиопередающих источников и выбирают ряд достаточно интенсивных сигналов для приема.
Квази - синхронизация между сигналами, принимаемыми из соответствующих радиопередающих источников, предпочтительно достигается путем отслеживания приема определенной части переданных сигналов, но может быть достигнута по-другому, средством, не зависимым от переданных сигналов, таким, как локальный синхросигнал, сигнал местного времени.
Система предпочтительно включает ряд региональных, национальных или даже международных сетевых стационарных приемных станций для обеспечения широкого охвата и использования систем позиционирования.
Приемные станции могут иметь возможность принимать два или более каналов одновременно, и может быть выгодно повторять прием сигналов из многочисленных радиопередающих источников.
Нижеследующее описание излагает, каким образом могут применяться принципы действия системы радионавигации и слежения с временными измерениями "Курсор" к цифровой радиосети типа системы телефонной связи GSM, для обеспечения возможности определения положения приемника, такого, как мобильный телефонный аппарат, относительно сети передатчиков. Аппаратура, используемая в такой сети, уже включает большинство из той аппаратуры, которая требует для операции определения положения, так что выполнение этой операции может быть достигнуто с небольшими дополнительными затратами. Точность каждого измерения положения обратно пропорциональна (среди прочих факторов) ширине полосы сигналов. Для одного канала глобальной системы мобильной связи GSM полосы шириной 200 КГц точность составляет приблизительно 50 м. Некоторое улучшение этой цифры может быть получено в тех случаях, когда и на базовой станции и на подвижном объекте можно принимать сигналы более чем из трех передатчиков системы GSM, все они могут затем использоваться в процессе определения положения.
Принципы действия системы определения положения настоящего изобретения и конкретное применение к технологии глобальной системы мобильной связи GSM описаны ниже со ссылками на сопровождающие чертежи, на которых:
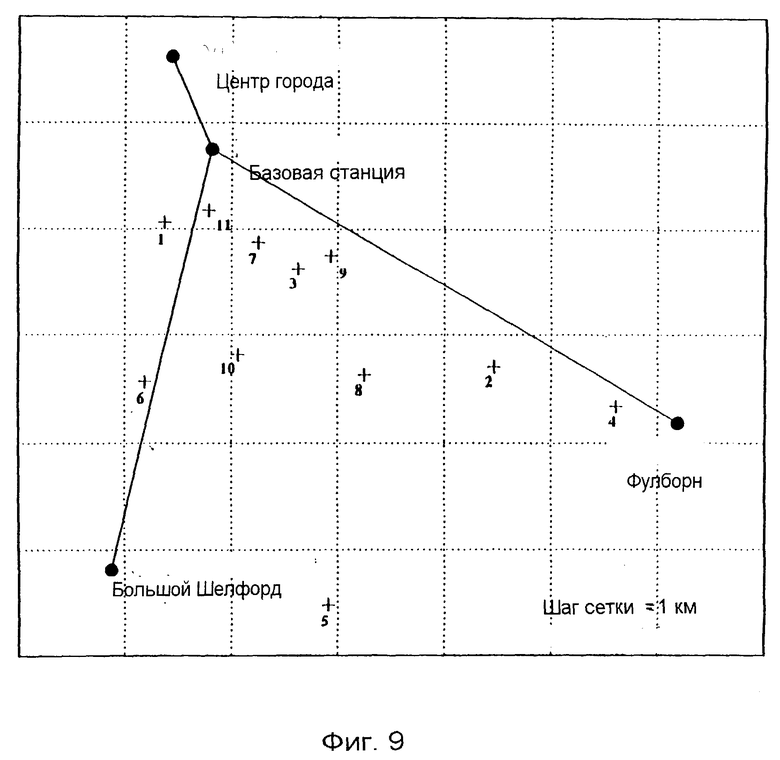
фиг. 1 изображает схему основных элементов системы, согласно изобретению;
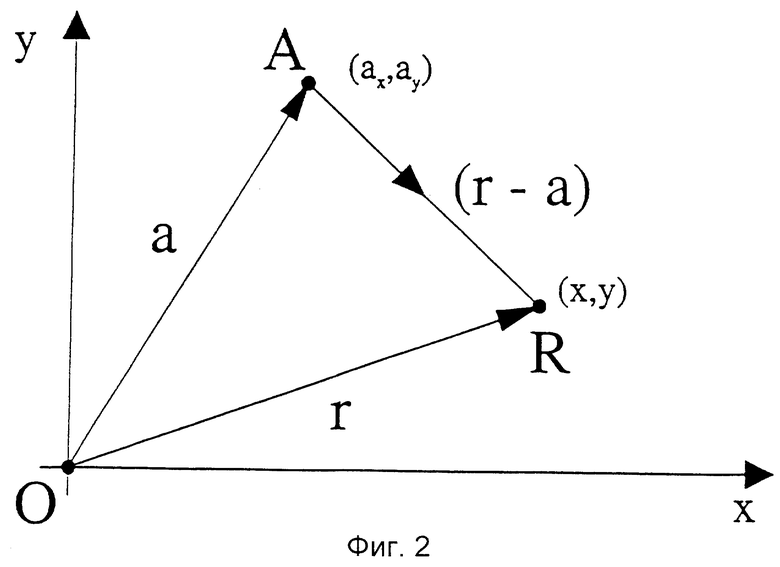
фиг. 2 изображает диаграмму для определения координат системы согласно изобретению;
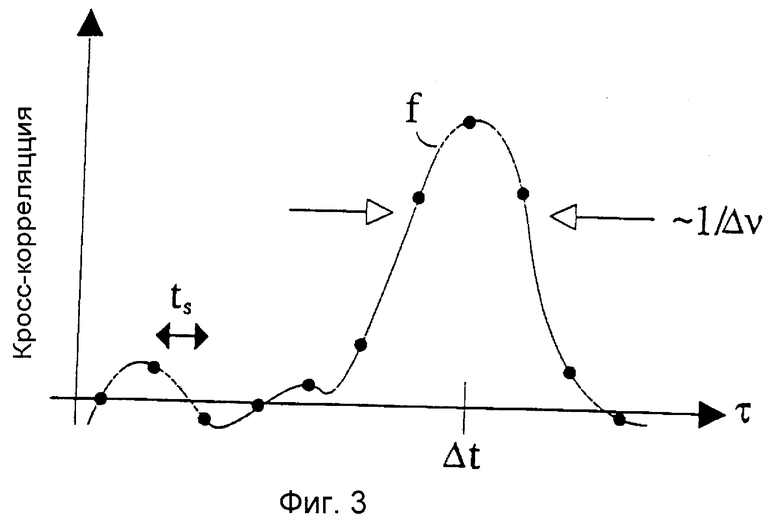
фиг. 3 иллюстрирует вычисление кросс-корреляционнвх функций, согласно изобретению;
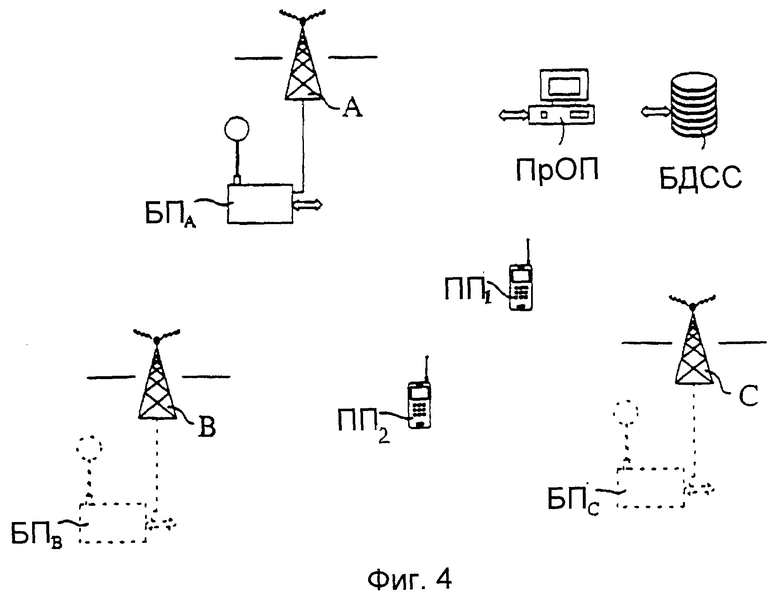
фиг. 4 иллюстрирует сеть GSM, с внедрением технологии временных измерений настоящего изобретения, и идентифицирует логические элементы этой технологии;
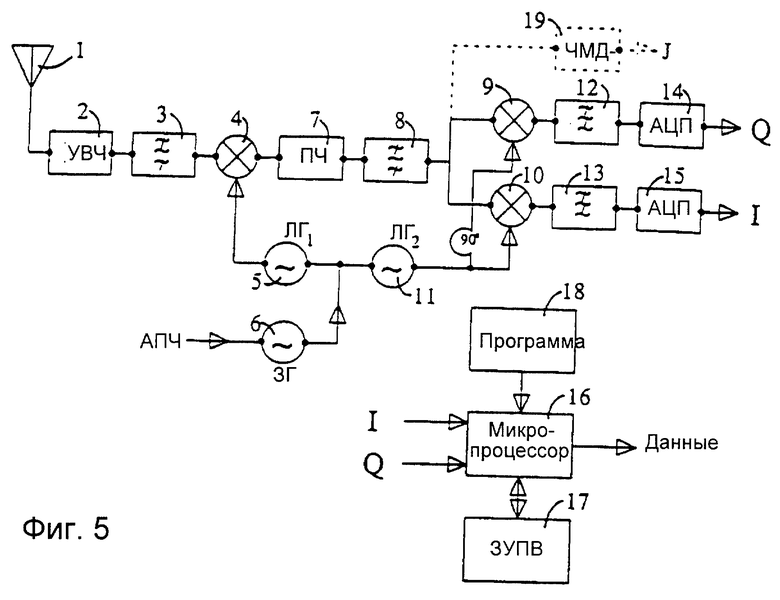
фиг. 5 иллюстрирует основные компоненты схемы телефонного аппарата системы GSM;
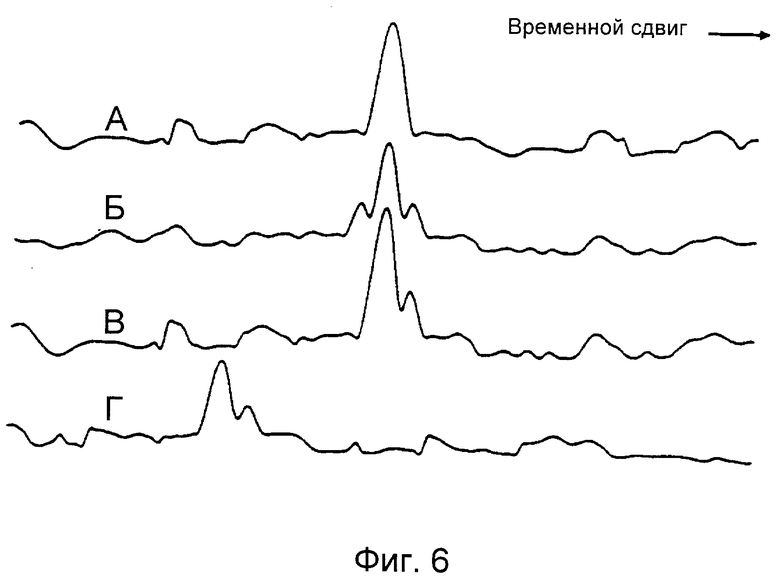
фиг. 6 иллюстрирует конкретный способ преодоления влияния многолучевого распространения радиосигналов на измерение относительных временных задержек, согласно изобретению;
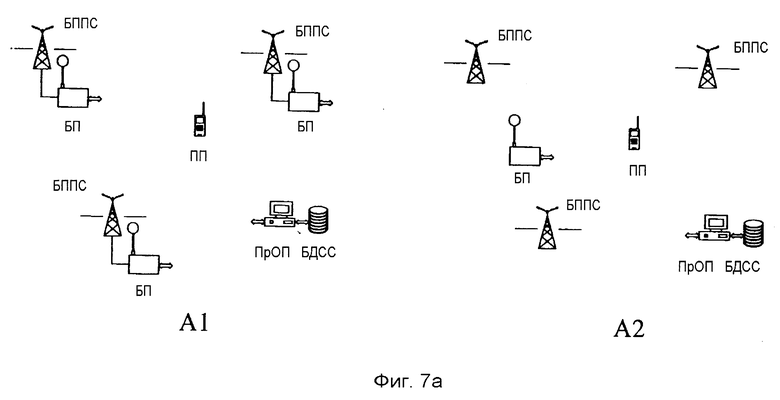
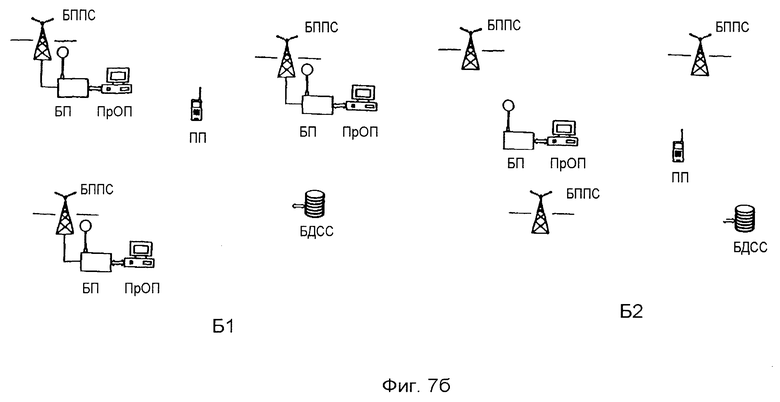
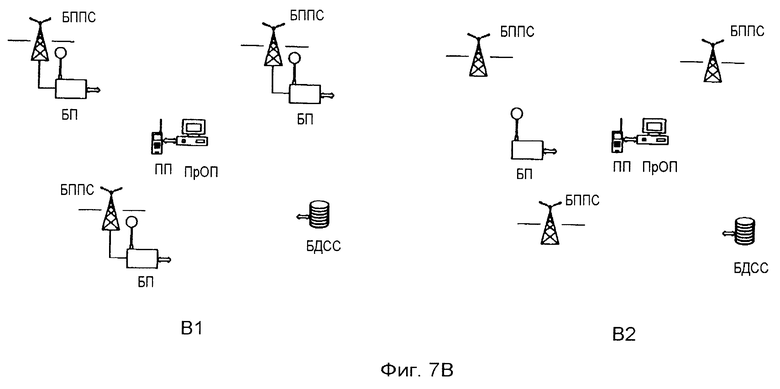
фиг. 7 (а, б, в) изображают различные конфигурации элементов в системе GSM, согласно изобретению;
фиг. 8 иллюстрирует графическое отображение информации о положении на небольшом жидкокристаллическом дисплее, согласно изобретению;
фиг. 9 иллюстрирует взаимное расположение элементов и контрольных пунктов при испытании, проведенном в Кембридже, согласно изобретению.
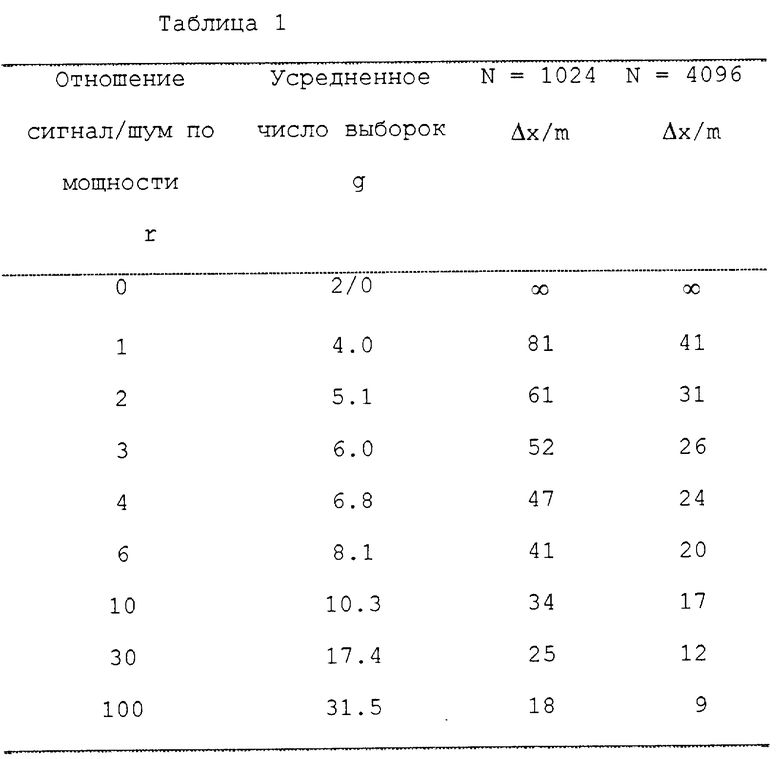
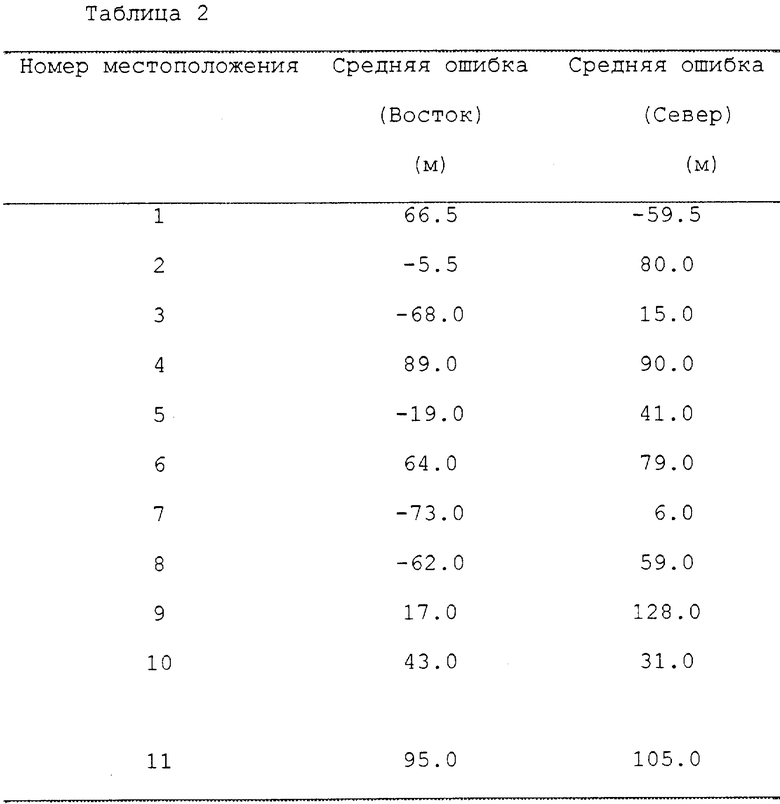
Таблица 1 показывает, каким образом собственная погрешность измерения изменяется в зависимости от отношения сигнал/шум по мощности и числа регистрируемых бит.
Таблица 2 представляет некоторые результаты испытаний системы определения положения, проведенных в Кембридже. Великобритания.
Ниже приводится описание принципа действия системы
Допустим, что передатчик A (фиг. 1) передает модулированные радиосигналы в пределах полосы частот шириной Δv с центральной частотой V0. Сигналы принимаются неподвижной базовой станцией О и подвижным приемником R.
Декартовы координаты (x, у) относительно осей с началом координат, находящимся в местоположении базовой станции, показаны на фиг. 2. Оси могут иметь любую ориентацию, но наиболее удобно установить их, привязываясь к карте местности, так, чтобы ось у лежала в направлении север-юг. Вектор  задает положение передатчика, а вектор
задает положение передатчика, а вектор  задает положение подвижного объекта. Вектор
задает положение подвижного объекта. Вектор  завершает построение треугольника OAR.
завершает построение треугольника OAR.
Передатчик A передает сигналы непрерывно. В заданный момент времени радиоприемники, расположенные в О и R, начинают принимать и регистрировать короткие отрезки передаваемой информации. Этот момент может быть отмечен, например, поступлением запускающего сигнала, переданного из А, или запускающего сигнала, выделенного из потока обычных сигналов, излучаемых передатчиком А, или запускающего сигнала, генерируемого локально. Последний из них может быть получен, например, с использованием импульса короткой длительности, полученного из заранее синхронизированных высокоточных часов, находящихся в приемниках R и О. В цифровой версии сигналы могли бы сначала преобразовываться из несущей Vo в основную полосу частот, преобразовываться в цифровую форму, и затем регистрироваться в динамической памяти. Хотя в приемниках О и R регистрация происходит почти одновременно, все же между двумя моментами регистрации будет иметь место временной сдвиг, который обуславливается и разницей в расстояниях AO и AR, и ошибкой синхронизации между появлением запускающего сигнала в точках O и R. Допустим, сдвиг Δt - это временной сдвиг, он задается выражением
где ε - ошибка синхронизации и v - скорость распространения радиосигналов.
Оценка временного сдвига Δt может быть получена из кросс-корреляции значений, сформированных в O и R. Каналы связи КС1 и КС2 (фиг.1) представляют собой передачу представлений сигналов, сформированных на каждой приемной станции, в процессор определения положения ПрОП. Природа каналов связи, т.е. передают ли они информацию в режиме, близком к режиму реального времени или вносят задержки, в принципе не имеет значения. Значение имеет только то, что копии значений, сформированных каждой приемной станцией, собираются вместе в процессоре определения положения для сравнения друг с другом.
Взаимная корреляция двух значений выполняется процессором определения положения с использованием любого подходящего средства. В случае цифровых сигналов, возможно, лучше всего выполнять кросс-корреляцию микропроцессором, который вычисляет оценки функции на дискретных интервалах временного сдвига τ, соответствующих интервалу осуществления выборки ts, как изображено точками на фиг. 3. Маловероятно, чтобы пик функции совпал с конкретной выборкой, так что микропроцессор должен также строить по точкам интерполяционную функцию, изображенную пунктирной кривой, для получения более точной оценки положения пика. Значение τ, соответствующее пику, и есть оценочное значение временного сдвига Δt.
Этот процесс квази-одновременной регистрации, передачи по одному или более каналам связи, сбора копий в одном месте, и оценки значения временного сдвига Δt из кросс-корреляции, должен выполняться по меньшей мере с использованием двух или трех пространственно разделенных передатчиков. Если на станциях O и R имеется средство для достаточно точной синхронизации, то достаточно, главным образом, двух измерений. В противном случае, если ошибка синхронизации ε - неизвестна, что бывает чаще всего, то необходимо по меньшей мере три измерения. Предположим для последнего случая (когда ε - неизвестна), что A, B и C - это три передатчика, находящихся в точках векторов  и
и  . Тогда три измерения временного сдвига Δt задаются выражениями
. Тогда три измерения временного сдвига Δt задаются выражениями


Эти три нелинейных уравнения могут быть решены для того, чтобы найти неизвестные x, у и ε. Таким образом, определяется положение подвижного объекта. Фактически, решение этих трех уравнений вообще неоднозначно с двумя возможными парами координат (x, у). Часто они достаточно далеки друг от друга, в случае чего очевидно, какой из них является правильным результатом (например, только одно из решений может находиться в пределах треугольника, образованного тремя передатчиками). Но если неоднозначность должна решаться автоматически, то необходимо контролировать дополнительный передатчик
Точность способа зависит от ошибки и оценочной функции временного сдвига Δt, выведенной из кросс-корреляции, и имеется три главных фактора, влияющих на эту ошибку. Во-первых, на точность результата влияет ширина кросс-корреляционной функции, так как более широкая функция дает менее острый пик. Ширина оценочной функции обратно пропорциональна ширине полосы частот Δv передаваемых сигналов. Следовательно, передаваемые сигналы с более широкой полосой частот обеспечивают более точное определение истинного положения. Следует отметить, что "ширина полосы частот" может охватывать все сигналы, излучаемые из определенной мачтовой радиоантенны, а не только один конкретный канал. Например, если десять смежных каналов, шириной 200 КГц каждый, были активны в пределах полной полосы частот шириной 2 МГц, то можно, используя широкополосный приемник или приемник, который может принимать одновременно несколько каналов, использовать все десять каналов сразу, и таким образом получать точность, соответствующую ширине полосы 2 МГц. Если некоторые из каналов бездействовали, то можно получить результирующую точность, соответствующую наибольшему разделению двух каналов.
Во-вторых, важно отношение сигнал/шум r по мощности сигналов. Предположим, что регистрируются однобитовые выборки принимаемых сигналов, преобразованных сначала в основную полосу частот. Каждая выборка представляет собой "единицу" или "ноль" в зависимости от того, каким был сигнал в момент осуществления выборки: больше или меньше нуля. Также предполагают, что сигналы заключены в пределах сплошной полосы частот, простирающейся от нуля до Δv, и что их выборка осуществляется с минимально допустимой частотой опроса (частотой Найквиста), равной 2Δv. Погрешность оценки положения пика Δτ связана со средним числом g(r) последовательных выборок, которые содержат только одну ошибку, описываемую приблизительным выражением
где N - полное число выборок, используемых в кросс-корреляции. Минимальное значение g составляет 2, поскольку даже тогда, когда нет никакого сигнала, однобитовые выборки имеют равную вероятность оказаться правильными или неправильными. Здесь мы предположили, что кросс-корреляционная функция имеет скорее треугольную форму, чем форму квадрата функции sinc, ожидаемую для шумовых сигналов и прямоугольных полосовых фильтров. Погрешности оценки положения Δτ складывается квадратично, как и погрешности положения Δx, где Δx = vΔτ. Отношение между g(r) и r может быть получено из следующих выражений при условии, что сигналы являются сигналами типа шума
q(r) = 1/p
При выборе полосы частот Δv, равной 200 КГц, получены результаты, приведенные в таблице 1.
Как отмечено выше, ошибки измерений от каждого передатчика Δx1, Δx2, Δx3 должны складываться в квадрате друг с другом и с любыми другими ошибками оценки положения подвижного объекта. Следует обратить внимание на то, что достаточно хорошие результаты могут быть получены даже в условиях плохого приема.
В-третьих, и что обычно практически наиболее важно, имеется ошибка, вносимая отсутствием точного знания траекторий, по которым сигналы достигают подвижного объекта. Многолучевое распространение радиосигналов уширяет кросс-корреляционную функцию, затрудняя оценку положения максимума. Оно также может привести к кросс-корреляционной функции с несколькими пиками, в которой нужный пик имеет более низкую амплитуду, чем другие. Если все сигналы прибывают косвенными маршрутами, то может вообще не быть никакого пика, соответствующего траектории прямого распространения. Однако, следует отметить, что многолучевое распространение радиосигналов всегда приводит к задержке сигналов по сравнению с распространением сигналов по прямой траектории. При условии, когда антенна базовой станции находится явно выше мешающих отражений от окружающих объектов, так что она принимает только наиболее прямые сигналы, тогда задержанные сигналы на подвижном объекте всегда появляются на задней стороне пика кросс-корреляции. В этих обстоятельствах можно ослабить влияние многолучевого распространения радиосигналов, как объясняется ниже. При построении подходящей интерполяционной функции по дискретным выборкам важно выбрать наименьшее значение τ, при котором сосредоточена значительная часть сигнала, в качестве того значения временной задержки Δt, которое должно использоваться в вычислении положения, что предпочтительнее использования непосредственно положения пика.
Использование способа для глобальной системы мобильной связи GSM.
Сигналы, излучаемые передатчиками в сети GSM, являются сложными. Гибкость и пропускная способность. Встроенные в ее структуру таковы, что трудно, если не невозможно, жертвовать ими для того, чтобы предсказать точно, как распределенный спектр (приблизительно 900 МГц и 1800 МГц в Европе) будет использоваться в произвольный момент. Полоса частот разделяется на ряд высокочастотных (ВЧ) каналов шириной 200 КГц, каждый из которых передает частотно-модулированные (ЧМ) сигналы, разделенные во времени на последовательность кадров. Основная единица - это так называемый кадр множественного доступа с временным разделением каналов (МДВРК) длительностью 4.615 мс, дополнительно разделенный на 8 временных интервалов. Каждый временной интервал несет 156.25 бит со скоростью 270 Кбит/сек и может представлять "нормальный пакет" данных и сопровождающую информацию, "пакет частотной коррекции" определенной конфигурации, "пакет синхронизации" данных и синхронизирующую информацию, или "пакет доступа" с синхронизирующей последовательностью и данными. Каждый из этих пакетов также несет заголовок, последний элемент и биты признака защиты. Число временных интервалов, используемых в произвольный момент времени в данном кадре, и число высокочастотных несущих, передаваемых из данного передатчика, зависит от конфигурации системы и от интенсивности потока транспорта в этот момент. Однако в наименее вероятном случае, когда все спокойно, одна из несущих высоких частот будет всегда действовать, неся так называемый радиовещательный канал управления (РКУ, логический канал), осуществляющий опрос мобильных телефонных аппаратов в соответствующих участках сотовой связи, посредством передачи одного пакета доступа в каждом кадре множественного доступа с временным разделением каналов (МДВРК). Следовательно, можно полагаться на то, что с каждой антенной мачты передатчика передается по меньшей мере один частотно-модулированный радиосигнал с шириной полосы приблизительно 200 КГц, который можно использовать для локации положения объекта.
Региональная сеть GSM, включающая систему позиционирования настоящего изобретения (фиг. 4) содержит базовые приемники (БП), помеченные индексами БПA, БПB, БПC, и т.д. для каждого соответствующего передатчика системы GSM A, B, C и т. д., способные принимать сигналы не только из их собственных локальных передатчиков, но и также по меньшей мере из двух других отдаленных передатчиков, ряд мобильных телефонных аппаратов, включающих мобильные приемники (ПП), помеченные индексами ППA, ППB, ППC, и т.д., действующие в заданной области. Важно то, что эти мобильные телефонные аппараты могут принимать сигналы из того же набора удаленных передатчиков также, как и из местного передатчика. Как отмечено выше, нет необходимости добиваться высокого отношения сигнал/шум для приема сигналов из удаленных передатчиков, но сама необходимость приема таких сигналов может ограничить применимость этой системы в сельской местности, где участки сотовой связи находятся на большом расстоянии. Система содержит также процессор определения положения (ПрОП) и базу данных системной службы (БДСС). Это устройство, которое обеспечивает данные, связанные с положением, соответствующие запросу абонентом системы определения положения. Например, абоненту может понадобиться инструкция для поиска вокзала в незнакомом городе. Процессор определения положения вычислит положение абонента и пошлет данные о положении в базу данных системной службы вместе с запросом абонента. База данных даст ответ посредством требуемого списка инструкций. Изображенная конфигурация, в которой процессор определения положения является автономным удаленным блоком, является только одной из нескольких возможных конфигураций. Например, процессор определения положения (ПрОП) и подвижный приемник (ПП) могли бы быть объединены вместе внутри телефонного аппарата так, что бы обработка положения проводилась собственным компьютером мобильного телефонного аппарата.
Необходимо установить код запускающего сигнала, который передается периодически из каждого передатчика, возможно в пределах логического канала РКУ. Как отмечено выше, то может быть специальный код, задаваемый в пределах существующей структуры GSM, или повторяющийся элемент самих стандартных сигналов GSM, таких, как поступление номера кадра с тремя нулями на конце, происходящее каждые 4 секунды. Поступление кода запускающего сигнала приводит к тому, что активный подвижный приемник (ПП) начинает обработку записи сигналов по меньшей мере из трех передатчиков. Иногда может существовать коммерческая выгода в создании кода запускающего сигнала, уникального для конкретного оператора или для конкретного мобильного телефонного аппарата, таким образом обеспечивая одно из средств оплаты службы определения положения абонентами. Имеется, конечно, много других возможных путей оплаты. Код запускающего сигнала также активизирует механизм регистрации в базовом приемнике (БП), связанном с передатчиком системы GSM. Поскольку большинство мобильных телефонных аппаратов системы GSM могут принимать сразу только один высокочастотный канал, то сначала должен быть установлен порядок регистрации сигналов из удаленных передатчиков, например, путем использования сигналов сотового радиовещания или службы коротких сообщений. Ниже показано, что может быть также необходимо записывать сигналы локального передатчика второй раз, чтобы учесть дрейф на протяжении периода записи. Если для каждого из двух удаленных передатчиков регистрируется 2048 выборок (по 1024 выборки для синфазного 1 и квадратурного Q сигналов), и 4096 выборок для локального передатчика (два набора по 2048 выборок), то полная обработка может быть выполнена за несколько сотен миллисекунд, включая время, затраченное на переключение между каналами и на настройку на каждую новую частоту. Записи, выполненные подвижным приемником (ПП) и базовым приемником (БП), затем посылаются любым подходящим средством в процессор определения положения (ПрОП). Подвижный приемник мог бы использовать например, временные интервалы в сигналах системы GSM или он мог бы направлять запрос передачи данных. Базовый приемник может посылать свои сигналограммы по наземной линии связи в удаленный процессор определения положения. Процессор принимает и транслирует в память собственные копии сигналов, принимаемых базовым и подвижным приемниками, для корреляционной и позиционной обработки. Он мог бы также использовать другие параметры сигналов, регистрируемых двумя приемными станциями, такие как интенсивность сигнала.
Сразу после трансляции данных процессор начинает выполнять кросс-корреляционный анализ. Можно использовать стандартные способы, но предпочтительным является способ, описанный ниже, который уменьшает эффекты многолучевого распространения радиосигналов. Имея выполненные оценки временных сдвигов Δta, Δtb, Δtc, процессор решает уравнения для оценки координат x и у. Однако необходимость последовательного приема сигналов из трех передатчиков вносит сложность, состоящую в том, что ошибка синхронизации ε все время изменяется и вряд ли может быть постоянной на протяжении периода регистрации. Можно моделировать эту ошибку на коротких промежутках времени как сумму постоянного сдвига и линейного наклона
ε = ε0+ε1t,
где ε0+ε1 - константы, t - время. Появляется дополнительная неизвестная величина ε1, которую необходимо оценить, это можно сделать, производя запись сигналов из локального передатчика заново во второй раз (и на базовой станции и на подвижном объекте). Теперь получается четыре значения временного сдвига Δt, полученные в последовательные моменты времени t1, t2, t3, и t4, и уравнения (1) приобретают вид
Первое и последнее из этих уравнений можно вычесть, чтобы получить выражение
Δta(t4)-Δta(t1) = ε1(t4-t1),
из которого можно найти ε1. Следовательно, имея четыре оценки временного сдвига Δt, можно численно решить уравнения (2) для определения координат x и у.
Мобильные телефонные аппараты, содержащие многоканальные приемники, способные принимать все три канала одновременно, не нуждаются в повторении регистрации сигналов из передатчика A, поскольку скорость дрейфа между тактовыми импульсами (измеряемая параметром ε1) в этом случае не имеет значения и не должна определяться. Высококачественные одноканальные мобильные телефонные аппараты могут также обходиться без повторной регистрации, если дрейф ошибки датчика тактовых импульсов достаточно мал, чтобы им пренебречь.
Как отмечено выше, почти все элементы аппаратных средств, необходимые внутри мобильного телефонного аппарата системы GSM, уже существуют для стандартного функционирования системы GSM. На фиг. 5 показано типичное исполнение. Радиочастотные сигналы в диапазоне 900 МГц или 1800 МГц принимаются антенной 1, усиливаются в высокочастотном усилителе (УВЧ) 2 и фильтруются высокочастотным полосовым фильтром 3 перед тем, как они будут преобразованы в промежуточную частоту ПЧ в смесителе 4 сигналом локального генератора ЛГ1, генерируемым генератором 5. Локальный генератор ЛГ1 уже включает необходимую способность переключения канала. Важно, чтобы частота была синхронизирована по фазе с частотой задающего генератора ЗГ, как правило, кварцевого генератора 6. Это также требование для нормальной работы системы GSM, поскольку оно не вносит дополнительных затрат. Сигналы ПЧ усиливаются усилителем 7, фильтруются полосовым фильтром 8 и преобразуются в основную полосу частот в квадратурных смесителях 9 и 10 с использованием сигнала ЛГ2 из второго локального генератора 11. Как и локальный генератор ЛГ1, этот второй генератор также должен быть синхронизирован по фазе с задающим генератором. Однако, точная настройка частоты (автоматическая подстройка частоты, АПЧ) также часто вводится в контур, который должен поддерживать частоту постоянной во время процесса регистрации. Сигналы с квадратурных выходов фильтруются низкочастотными фильтрами 12 и 13, преобразуются в цифровую форму в аналого-цифровых преобразователях 14 и 15, на выходе имеются битовые потоки, обозначенные I и Q. Теперь для определения положения требуется, чтобы микропроцессор 16 просто зарегистрировал битовые потоки в динамическом ЗУПВ 17 под управлением программы 18. Может потребоваться некоторая дополнительная память. Основная модификация, необходимая для обеспечения возможности определения положения, состоит во встроенной программе, выполняемой в микропроцессоре, и в связи с этим может понадобиться модернизация самого процессора в сторону быстродействия. Подобная аппаратура необходима для базовой приемной станции.
Коммерчески ограничивающим элементом в системе настоящего изобретения, вероятно, является средство, с помощью которого сигналы, зарегистрированные на базовой станции и подвижном объекте, передаются в процессор определения положения для кросс-корреляции. Поэтому важно в максимально возможной степени уменьшить число передаваемых бит. Как отмечено выше, осуществление однобитовой выборки производит адекватные результаты даже при условии приема слабого сигнала, и, хотя можно получить несколько более высокую точность с использованием, скажем, осуществления двухбитовой выборки. Увеличение загрузки связи нерационально. Лучше удвоить число однобитных выборок, и следовательно, удвоить длину интервала выборки, чем использовать двухбитовые выборки. Может также потребоваться измерение обоих каналов I и Q и выполнение сложной кросс-корреляции, так как сигналы базовой станции и подвижного объекта вряд ли будут синфазны друг с другом, а кварцевые генераторы не синхронизированы между собой. Пусть квадратурные битовые потоки в подвижном объекте (ПП) представлены величинами I и Q, где
I = V1(t)cos(θ1)
и Q = V2(t)sin(θ1), где θ1 - фаза сигналов, V1(t), V2(t) - их амплитуды. Соответствующие величины, зарегистрированные на базовой станции (БП), следующие:  и
и  .
.
Микропроцессор затем должен вычислить четыре кросс-корреляции, соответствующих величинам II', QQ, lQ, I'Q, и затем искать пик величины p, где
Разность фаз θ = θ1-θ2, может быть также получена из выражения
и она может использоваться для устранения небольшого частотного сдвига между локальными генераторами на базовой станции и подвижном объекте, так, чтобы осуществлялось возможно более продолжительное интегрирование.
Уравнения (1) и (2), приведенные выше, показывают, каким образом можно использовать оценки временных задержек Δt для получения положения (x, у) подвижного объекта и ошибки синхронизации ε между базовой станцией и подвижным объектом. Для этого процесса самым важным является точность, с которой из кросс-корреляционных функций можно получить оценки временных задержек Δt. Как отмечено выше, главное ограничение точности, вызвано многолучевым распространением сигналов из передатчика системы GSM к подвижному объекту. Предполагается, что антенна на базовой станции установлена достаточно высоко над мешающими отражениями от окружения, чтобы гарантировать, что многолучевое распространение достаточно мало, чтобы им пренебречь. При этих обстоятельствах многолучевое распространение радиосигналов к подвижному объекту приводит к уширению пика кросс-корреляции в сторону более длинных временных задержек, поскольку сигналы по наиболее прямой траектории поступают первыми. Предпочтительный способ получения оценки временной задержки Δt основан на использовании автокорреляционной функции (АКФ) сигналов базовой станции и подвижного объекта, а также кросс-корреляционной функции (ККФ) между ними. В изобретении использованы две автокорреляционные функции, чтобы вывести вероятную форму кросс-корреляционной функции, и затем подогнать этот "эталонный график" к кросс-корреляционной функции для получения лучшей оценки временной задержки Δt.
Две автокорреляционные функции АКФПП и АКФБП наряду с кросс-корреляционной функцией ККФ, можно получить любым из стандартных средств (см. например в "Random Data: analysis and measurement procedures" by J.S. Bendat and A.G.Piersol, Wiley-interscience, 1971, ("Случайные данные: анализ и процедуры измерения"). Предпочтительны способы, которые включают быстрые преобразования Фурье (БПФ). Автокорреляционная функция АКФБП является хорошей оценкой "собственной" автокорреляции передаваемых сигналов (пренебрежимо малый эффект многолучевого распространения радиосигналов), тогда как автокорреляционная функция АКФПП искажается сигналами многолучевого распространения, то есть сигналами, задержанными более чем на 30 м эквивалентного пути. На фиг. 6 изображен частный пример, где записанная кривая A представляет собой автокорреляционную функцию АКФБП, а записанная кривая Б представляет собой автокорреляционную функцию АКФПП. Из диаграммы видно, что многолучевое распространение радиосигналов порождает в записанной кривой Б вторичные пики, которые появляются с обеих сторон от главного пика, так как автокорреляционная функция всегда симметрична. "Эталонный график" строят, беря левую часть автокорреляционной функции АКФБП (часть записанной кривой A слева от центрального пика, соответствующая отрицательной оси времени) и присоединяя ее к правой части АКФПП (записанная кривая Б справа от центрального пика. Соответствующая положительной оси времени). Этот "эталонный график" изображен в виде записанной кривой B. Измеренная кросс-корреляционная функция ККФ изображена в виде записанной кривой Г, и видно, что "эталонный график" В воспроизводит основные черты. Затем получают оценку временного сдвига Δt, подгоняя эталонный график к измеренной кросс-корреляционной функции ККФ, с использованием любого стандартного способа, допуская, чтобы амплитуды из двух половин эталонного графика были независимыми параметрами, также, как Δt. Процедура аппроксимации также дает параметр "качество аппроксимации", который можно использовать, как основание для отклонения или включения данных.
В случаях, когда более трех передатчиков системы GSM могут приниматься как на базовой станции, так и на подвижном объекте, может быть выгодно использовать их все в процессе определения положения, особенно если одна или две из траекторий по существу искривлены. В таком случае высокое качество параметра аппроксимации может обеспечить весовой коэффициент для каждого Δt, используемого для определения положения.
Мобильные телефонные аппараты системы GSM включают многоуровневые аналого-цифровые преобразователи (АЦП) и используют адаптивные способы обработки, чтобы уменьшить ошибки, возникающие в результате многолучевого распространения радиосигналов. Следовательно, в зависимости от конструкции мобильного телефонного аппарата, можно использовать сами демодулированные сигналы для кросс-корреляционной функции, и это предпочтительнее, чем использовать необработанные - потоки данных I и Q из приемников. Такую дополнительную задержку, вносимую адаптивной обработкой, следует, конечно, устранять, и никакой объем обработки не может учесть неизвестную дополнительную длину полностью искривленной траектории сигнала, но тем не менее демодулированные выходные данные могут лучше подходить для оценки временных задержек, чем предварительно обработанные потоки исходных данных I и Q.
На фиг. 5 пунктирной линией изображен дискриминатор с частотной модуляцией 19 (ЧМД). ЧМ дискриминация преобразует частотный сдвиг в постоянный сдвиг (в виде постоянного тока) на выходе, так что квадратурные сигналы (I и Q) не требуются, а заменяются одним сигналом J. Это дает два дополнительных преимущества, состоящих в том, что:
а) вдвое меньше данных необходимо передавать по каналам связи, и
б) нет необходимости подстраивать частотный сдвиг в процессоре определения положения, что позволит сократить служебные действия процессора.
Как отмечено выше, возможны несколько различных конфигураций системы определения положения настоящего изобретения в зависимости от относительных местоположений передатчиков системы GSM (часто называемых базовыми приемопередающими станциями, БППС) подвижных приемников (ПП), базовых приемников (БП), процессора определения положения (ПрОП), и базы данных системной службы (БДСС). На фиг. 7а, 7б, 7в представлены три конфигурации, обозначенные А. Б и В. Каждая из них далее подразделяется на две. Фиг. 7а изображает конфигурацию, в которой процессор определения положения (ПрОП) и база данных системной службы (БДСС) располагаются совместно в положении, удаленном и от базового приемника (БП) и от подвижного приемника (ПП). Это может иметь место, например, когда одна комбинированная система ПрОП/БДСС обслуживает весь регион. В конфигурации А1 каждая базовая приемопередающая станция (БПСС) имеет базовый приемник (БП), расположенный вместе с ней. В конфигурации А2 базовый приемник (БП), обслуживающий локальный участок сотовой связи, окруженный тремя базовыми приемо-передающими станциями (БППС), изображен в пределах локального участка сотовой связи. Конфигурация Б1 и Б2 (фиг. 76) подобны А1 и А2, соответственно, за исключением того, что теперь имеется много процессоров определения положения (ПрОП). В конфигурации Б1 каждая базовая приемо-передающая станция (БППС) имеет присоединенный к ней базовый приемник (БП). В конфигурации Б2 каждый треугольник из трех БППС имеет в своих пределах процессор определения положения (ПрОП), из которых изображен только один. Региональная база данных системной службы (БДСС) остается в удаленном местоположении. Конфигурации В1 и В2 (фиг. 7в) подобны А1 и А2, но в них вычисление положения осуществляется внутри каждого мобильного телефонного аппарата. Возможны также другие конфигурации, каждая из которых имеет относительные преимущества, делающие их подходящими для конкретных коммерческих применений.
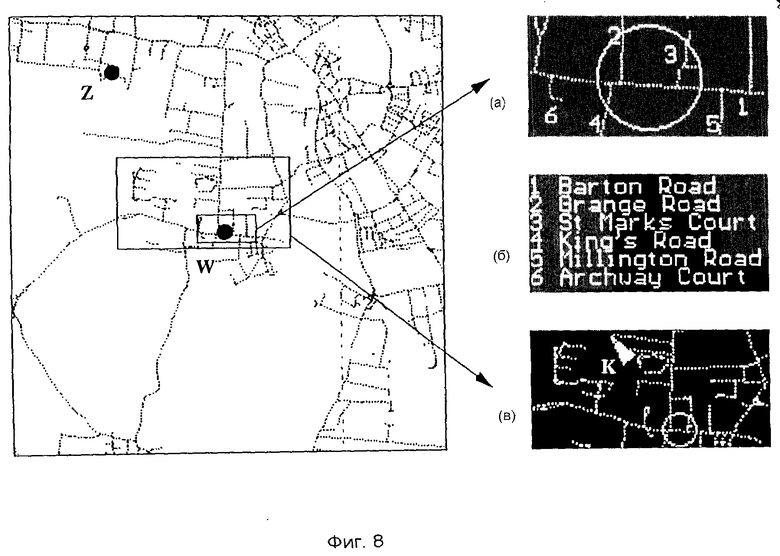
В некоторых коммерческих применениях может быть выгодно отображать информационную карту в графическом виде как часть ответа базы данных системной службы на запрос о координатно-информационном обеспечении. Подобный пример представлен на фиг. 8, которая изображает, как карта участка местности могла бы быть изображена на экране, подсоединенном к процессору определения положения, или на отслеживающей станции. Абонент сделал запрос о направлениях движения к точке, обозначенной закрашенным кружком с меткой Z, и процессор определения положения вычислил, что абонент находится где-то в пределах закрашенного круга с меткой W. Переносной телефонный аппарат абонента содержит жидкокристаллический матричный дисплей, который может отображать маленькие участки большой карты, а также и символьную информацию. Первое изображение, отображаемое на экране мобильного телефонного аппарата, может быть таким, как изображено на панели с пометкой (а) на фиг. 8. Это - крупномасштабная карта участка местности с кругом радиусом 100 м, центрированным в расчетном положении. Дороги помечены цифрами 1, 2, 3 и т.д., соответствующими названиям, указанным на втором изображении на экране, панель (б). При желании абонент может переключать эти изображения на экране - от одного к другому. Панель (в) изображает карту участка местности в большем масштабе вместе с указателем К, который указывает направление к месту назначения, Z. Очевидно, что возможно много других изображений информации на экране, включая изображение адреса места назначения, местных условий движения, приблизительного расстояния, и т.д. В коммерческих целях при необходимости можно изыскать возможность для ограниченной передачи рекламных объявлений на дисплее мобильного телефонного аппарата.
Испытания макетной системы (опытного образца).
Опытный образец с использованием пары стандартных портативных телефонных аппаратов и некоторой дополнительной регистрирующей аппаратуры был установлен в Кембридже, Великобритания. Базовая станция (БП) располагалась в трехэтажном здании вблизи центра города (фиг. 9) с антенной, закрепленной на крыше. Подвижный приемник (ПП) перемещался в автомобиле к различным местоположениям в южной части города, как показано крестиками. Три использовавшихся в испытании передатчика базовой приемо-передающей станции (БППС) системы GSM располагались, соответственно, в центре города, в Большом Шелфорде на юге, и в Фулборне на юго-востоке. Таблица 2 представляет средние ошибки позиционирования по обеим координатам, то есть разность между усредненными значениями приблизительно 10 независимых определений положения и истинными координатами положений, измеренными на карте. Использовались простые методы анализа данных без какого-либо специального устранения эффектов многолучевого распространения радиосигналов. Собственная точность устройства, полученная при испытаниях при совместном расположении на стенде базового приемника и подвижного приемника была менее 20 м (среднеквадратичное значение). Испытания с номерами от 1 до 6 были выполнены при остановке подвижного объекта, испытания с номерами 7-11 были выполнены при скоростях от 40 до 64 км в час.
Изобретение относится к системе определения положения по принимаемым цифровым телефонным сигналам, которые передаются рядом базовых приемопередающих станций (БППС). Система имеет: пару приемных станций БП - базовый приемник и ПП - подвижный приемник, один в известном местоложении, а другой на подвижном объеме, процессор определения положения и средство передачи сигнала связи от каждой из приемных станций в процессор определения положения, причем сигнал связи содержит информацию о сигналах, принятых на приемной станции от радиопередающих источников. Каждую из приемных станций настраивают для практически одновременного приема от соответствующих радиопередающих источников. Процессор определения положения настраивают так, чтобы сравнивать информацию, принимаемую от одной приемной станции, с информацией, принимаемой от другой приемной станции, и для определения временной задержки между соответствующими сигналами, принятыми на обеих приемных станциях, для определения положения подвижного объекта. Технический результат заключается в расширении функциональных возможностей системы. 3 с. и 17 з.п. ф-лы, 9 ил.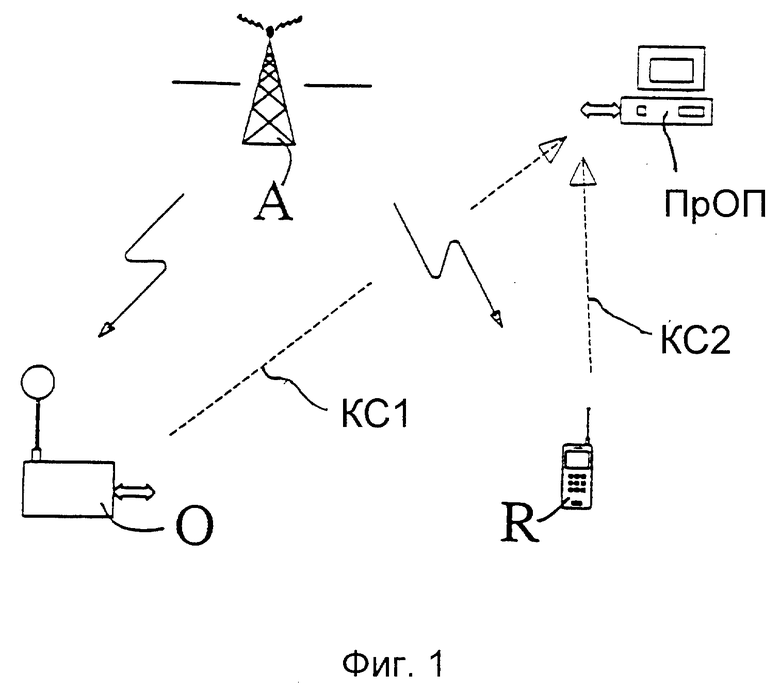
| ВСЕСОЮЗНАЯ ПДТ?НТНО-ТЕХНМЧЕСК ^БИБЛИОТЕКА | 0 |
|
SU303371A1 |
| WO 9523981 A, 08.09.95 | |||
| Анаморфотная афокальная насадка | 1975 |
|
SU528530A1 |
| WO 9517686 A, 29.06.95 | |||
| Машина для уборки соцветий лекарственных растений | 1972 |
|
SU470272A1 |
| Система связи | 1981 |
|
SU1094559A1 |

