Изобретение относится к системам цифровой связи, использующим прямое исправление ошибок, в частности, к способу и устройству для декодирования принимаемых когерентных сигналов, модулированных методом многоуровневой фазовой манипуляции (МФМ) с дифференциальным кодированием символов, с помощью метрики мягкого решения.
Описание предшествующего уровня техники
Вследствие быстрого роста индустрии сотовой телефонной связи, системы цифровой связи стали широко использоваться в качестве стандарта для многих современных и будущих систем, благодаря их преимуществам по пропускной способности системы и ее эффективности. В системах цифровой связи для улучшения показателя частоты ошибок по битам (ЧОБ) обычно используется метод прямого исправления ошибок (ПИО), при котором в передаваемый сигнал вводится избыточность, для увеличения устойчивости передаваемых сигналов к шумам канала связи. Методы декодирования при использовании ПИО очень разнообразны и часто зависят от используемой схемы модуляции.
Системы цифровой связи имеют возможность выбора из различных использующихся методов модуляции. Один из таких методов модуляции, многоуровневая фазовая манипуляция (МФМ), обычно используется вследствие его спектральной эффективности и достижимого значения показателя ЧОБ. МФМ - способ модуляции, при котором информация хранится в фазе передаваемого сигнала. Фаза каждого передаваемого символа может принимать одно из 2M возможных значений, где M обозначает порядок модуляции. Примерами МФМ с различными порядками являются: бинарная фазовая манипуляция (БФМ) (M=2) и квадратурная фазовая манипуляция (КФМ) (M = 4). Два обычных подхода при детектировании сигналов, модулированных методом МФМ, это - когерентное детектирование и некогерентное детектирование. При когерентном детектировании требуется средство, которое обеспечивает получение оценки опорной фазы принимаемого сигнала. Такой опорной фазы не требуется при некогерентном детектировании, хотя существенным является средство, которое обеспечивает относительную устойчивость передаваемого сигнала к сдвигам фазы. Наиболее распространенным методом для обеспечения такой устойчивости является дифференциальное кодирование передаваемого сигнала в передатчике с последующим дифференциальным декодированием принимаемого сигнала в приемнике. Дифференциальное кодирование - это способ преобразования информации в разность фаз между двух ближайших символов. Этот способ противоположен способу, где информация преобразуется в абсолютную фазу каждого символа. Дифференциальное кодирование как вариант может использоваться с МФМ. Система МФИ, которая использует дифференциальное кодирование и некогерентное детектирование в приемнике, называется системой с дифференциальной фазовой манипуляцией (ДМФ). А система МФМ, которая использует дифференциальное кодирование и когерентное детектирование в приемнике, называется системой фазовой манипуляции с дифференциальным кодированием (ФМДК).
Различные системы цифровой связи, например такие, как системы наземной сотовой связи (например, Американская Цифровая Сотовая связь - USDC), обычно используют ДФМ модуляцию, главным образом из-за простоты конструкции некогерентного приемника. Другие системы цифровой связи, например такие, как системы с использованием низкоорбитальных спутников, используют модуляцию методом ФМДК вследствие жестких энергетических ограничений на спутниках и из-за необходимости учитывать существенные доплеровские сдвиги частоты.
На фиг. 1 представлена блок-схема, иллюстрирующая известное устройство для декодирования сигналов, модулированных путем ФМДК. Устройство, показанное на фиг. 1, обеспечивает декодирование сигналов, модулированных путем КФМ. При использовании КФМ - модуляции передатчик модулирует сигнал несущей, имеющий фазовую (I) и квадратурную (Q) компоненты. Таким образом, как это определено символами, закодированными в сигнале. Каждый бит символов модулирует одну из компонентов I или Q таким образом, что в передатчике существует только одно из четырех возможных фазовых соотношений между компонентами I и Q. При передаче информация, содержащаяся в сигнале несущей, модулированном путем КФМ, искажается шумами, такими как аддитивный белый гауссов шум. В системах, которые передают информацию на радиочастотах (РЧ), например в системах сотовой связи, передаваемый сигнал также имеет тенденцию к замиранию вследствие усиливающей и ослабляющей интерференции принимаемого сигнала многолучевого распространения. Замирание проявляется в искажении амплитуды и фазы принимаемого сигнала.
Сигнал, модулированный путем КФМ, принимается когерентным приемником 101, демодулируется и дискретизируется с частотой следования символов для получения цифровых выборок компонентов I и Q последовательности принимаемых символов. Принимаемые символы проходят через квантователь 103, который осуществляет квантование или обеспечивает алгоритм декодирования, который формирует символьное решение, то есть решает, какой символ был передан, несмотря на тот факт, что принятый символ неизбежно был искажен шумами. После квантования символьные решения поступают через дифференциальный декодер 105 в декодер 107 прямого исправления ошибок (ПИО). Декодер ПИО 107, который может использовать алгоритм Витерби, декодирует кодированные данные последовательности принимаемых символов в соответствии с квантовыми символами. Поскольку квантование (т.е. символьные решения) принимаемых символов выполняется до декодера ПИО, то такой метод известен из предшествующего уровня техники как метод декодирования с "жестким" решением.
Алгоритм декодирования ПИО с "жестким" решением - это алгоритм, который использует в качестве входных данных и выполняет операции над принятыми символами, квантованными на символы, являющиеся одним из возможных передаваемых символов. Для КФМ такое квантование отображает компоненты I и Q каждого принимаемого символа в вектор в двухмерном векторном пространстве, определяемом осями I и Q (которое эквивалентно комплексной плоскости). Передатчик модулирует несущую (путем КФМ модуляции) в соответствии с одним из четырех возможных передаваемых символов. Дополнительно каждый из четырех возможных символов отображается в виде вектора, направленного из центра координат и расположенного в соответствующем одном из четырех квадрантов векторного пространства I - Q. Квантователь 103 вычисляет расстояния между вектором, описывающим компоненты I и Q каждого принимаемого символа, и каждым из четырех векторов, описывающих возможные передаваемые символы. Шум квантования вводится как результат принятия таких символьных решений путем перемещения векторов, описывающих компоненты I и Q каждого принятого символа, к ближайшему одному из четырех векторов, описывающих возможные передаваемые символы.
Алгоритм ПИО с "мягким" решением - это алгоритм, который использует любую метрику или измерение, который с помощью определенных средств связывает степень доверительной вероятности с символьным решением, при этом достоверность такой меры доверительной вероятности больше, чем обеспечиваемая квантованием при жестком решении. Декодирование путем ПИО с "мягким" решением обычно дает улучшенное значение ЧОБ по сравнению с тем, которое может быть получено при декодировании путем ПИО с "жестким" решением.
Известные устройства, которые декодируют сигналы, модулированные путем ФМДК, в процессе декодирования слишком рано квантуют или принимают символьные решения. Устройство, показанное на фиг. 1, принимает символьные решения до дифференциального декодера 105. Хотя более поздняя обработка может быть выполнена более легко, потому что, например, выборки не нужно хранить в памяти высокой точности. Значение ЧОБ ухудшается. Таким образом, информация "мягкого решения", которая могла бы быть использована для улучшения характеристик декодера с ПИО 107, теряется при квантовании.
Поэтому существует потребность в устройстве для декодирования сигналов, модулированных путем ФМДК, которое передает информацию "мягкого" решения непосредственно в декодер ПИО.
Краткое описание чертежей
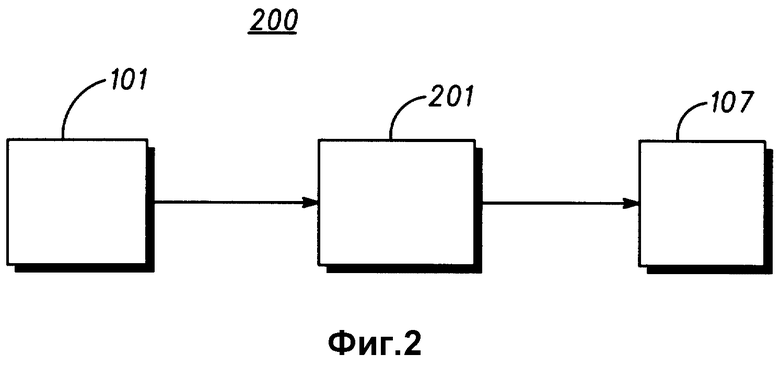
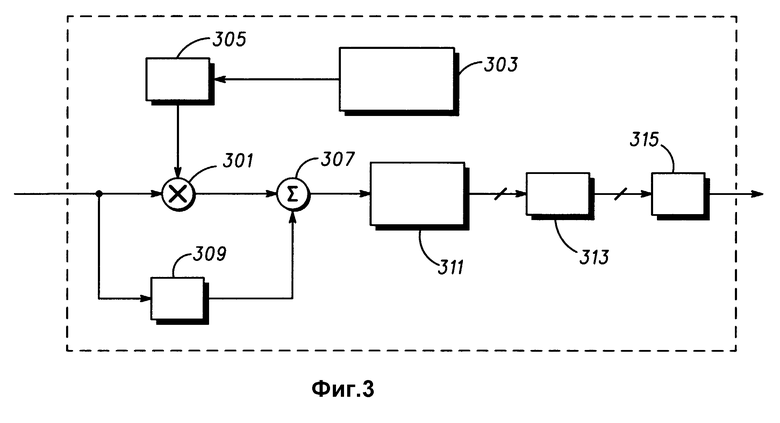
Фиг. 1 - блок-схема, иллюстрирующая известное устройство для декодирования когерентных дифференциально кодированных сигналов, модулированных путем МФМ; фиг. 2 - блок-схема, иллюстрирующая устройство для декодирования когерентных дифференциально кодированных сигналов, модулированных путем МФМ, согласно настоящему изобретению; фиг. 3 - блок-схема, иллюстрирующая блок вычислителя метрики по фиг. 2, согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Изобретение относится к устройству для декодирования когерентного сигнала, модулированного путем многоуровневой фазовой манипуляции с дифференциальным кодированием символов (ФМДК).
Устройство декодирования содержит когерентный приемник для приема когерентного сигнала, модулированного путем ФМДК. Декодирующее устройство кроме того содержит вычислитель метрики, соединенный с когерентным приемником, для генерации метрики "мягкого" решения, соответствующей когерентному сигналу, модулированному путем ФМДК. Декодирующее устройство дополнительно содержит декодер прямого исправления ошибок (ПИО), связанный с вычислителем метрики, для декодирования когерентного сигнала, модулированного путем ФМДК3, в соответствии с упомянутой метрикой "мягкого" решения, соответствующей когерентному сигналу, модулированному путем ФМДК.
На фиг. 2 показана блок-схема, иллюстрирующая декодирующее устройство 200 системы связи для декодирования когерентных сигналов, модулированных путем ФМДК, в соответствии с настоящим изобретением. Хотя предпочтительно для использования в абонентских блоках и на спутниках системы спутниковой связи декодирующее устройство 200 может содержать часть приемной схемы любого цифрового приемника, использующего модуляцию путем ФМДК. Декодирующее устройство 200 содержит когерентный приемник 101 и декодер 107 прямого исправления ошибок (ПИО), описанный выше со ссылками на фиг. 1. Однако вместо использования квантователя 103 и дифференциального декодера 105 по фиг. 1, декодирующее устройство 200 содержит вычислитель метрики 201, включенный между когерентным приемником 101 и декодером ПИО 107.
Когерентный приемник 101 принимает когерентный сигнал, модулированный путем ФМДК, переданный передатчиком. Перед передачей передаваемая информация сначала кодируется кодером ПИО и преобразуется в символы, причем число различных символов зависит от типа модуляции, используемой в системе связи. Например, модуляция путем многоуровневой фазовой манипуляции (МФМ) использует M различных символов, а модуляция путем квадратурной фазовой манипуляции (КФМ) использует только 4 различных символа. Затем данные, закодированные символами, дифференциально кодируются таким образом, чтобы избежать нежелательного поворота частоты между символами и "сдвига секторов" вследствие возможных доплеровских сдвигов частоты при передаче. Полученный в результате дифференциально кодированный сигнал, переданный в когерентный приемник 101 передатчиком, может быть представлен в следующем виде:
где
n - представляет дискретный временной интервал;
P - представляет среднюю мощность;
d(n) - дифференциально кодированная последовательность, которая определяется следующим функциональным уравнением:
где
N - представляет длину принимаемого сигнала;
S(n) - представляет действительный (кодированный методом ПИО) переданный символ, который может быть любым из возможных символов, обозначенных следующим множеством:
После приема когерентным приемником 101 дифференциально кодированный переданный сигнал направляется в фильтр и субдискретизатор, входящий в него. Поскольку принятый дифференциально кодированный переданный сигнал субдискретизируется с частотой следования символов, то субдискретизатор выдает одиночный принятый символ за каждый дискретный временной интервал. Одиночный принятый символ можно назвать текущим принятым символом r (n), который может быть представлен следующим уравнением:
где
ω (n) представляет гауссов шум, вводимый при передаче.
До выдачи текущего принятого символа r (n) из когерентного приемника 101 последний компенсирует для данного принятого символа r(n) доплеровский сдвиг частоты путем сначала оценки сдвига фазы и частоты принятого символа r(n) с помощью устройства оценки фазы и затем смешивания данного принятого символа r(n) с сопряженным выходным сигналом устройства оценки фазы. Дополнительная компенсация может быть также обеспечена для кратковременного замирания в канале. Данный принятый символ r(n) после компенсации выводится в вычислитель метрики 201.
Вычислитель метрики 201 сравнивает данный принятый символ r(n) с множеством из всех возможных передаваемых символов, для того чтобы выявить действительный переданный символ S(n). Для осуществления этого сравнения вычислитель метрики 201 в течение каждого дискретного временного интервала многократно приводится в действие. Сколько раз вычислитель метрики 201 приводится в действие, зависит от типа модуляции, используемой в системе связи. Для сигналов, модулированных путем МФМ, в которых существует в целом M возможных передаваемых символов, вычислитель метрики 201 должен включаться в работу M раз для каждого дискретного временного интервала. При использовании модуляции путем КФМ, с четырьмя различными символами, вычислитель метрики 201 должен включаться в работу только 4 раза для каждого дискретного временного интервала.
В отличие от известных декодеров ПИО, таких как декодер ПИО 107, и алгоритма декодирования Витерби, который может в них использоваться, вычислитель метрики 201 формирует на выходе информацию "мягкого" решения в виде соответствия между возможными передаваемыми символами и действительным переданным символом S(n). А конкретно, для каждого из возможных передаваемых символов вычислитель метрики 201 выдает значение вероятности, отражающее степень достоверности того, что переданный действительный символ S(n), реализованный в данном принятом символе r(n), является конкретным одним из возможных передаваемых символов. Поэтому в конце дискретного временного интервала для данного принятого символа r(n), в течение которого вычислитель метрики 201 включался в работу многократно в соответствии с типом используемой модуляции, последовательность значений вероятности, соответствующих возможным передаваемым символам, выводится в качестве строки или столбца в выходной матрице 
Например, выходная матрица  текущего принятого символа r(n) в схеме модуляции путем КФМ, в которой возможные передаваемые символы образуют множество {I, -j, -I, j}, может быть представлена в виде матрицы размера 1х4 из значений вероятностей, как например [4 2 5 7]. Столбцы матрицы размера 1х4 [4 2 5 7] определяются каждым из символов множества {I, -j, -I, j} таким образом, что она непосредственно связывает соответствующую вероятность того, что действительный переданный символ S(n) соответствует каждому из возможных передаваемых символов, {I, -j, -I, j}. То есть элемент (1, 1) матрицы размера 1х4 соответствует символу 1, элемент (1, 2) соответствует символу -j, элемент (1, 3) соответствует символу -I, и элемент (1, 4) соответствует символу j. Декодер 107 может затем интерпретировать выходную матрицу
текущего принятого символа r(n) в схеме модуляции путем КФМ, в которой возможные передаваемые символы образуют множество {I, -j, -I, j}, может быть представлена в виде матрицы размера 1х4 из значений вероятностей, как например [4 2 5 7]. Столбцы матрицы размера 1х4 [4 2 5 7] определяются каждым из символов множества {I, -j, -I, j} таким образом, что она непосредственно связывает соответствующую вероятность того, что действительный переданный символ S(n) соответствует каждому из возможных передаваемых символов, {I, -j, -I, j}. То есть элемент (1, 1) матрицы размера 1х4 соответствует символу 1, элемент (1, 2) соответствует символу -j, элемент (1, 3) соответствует символу -I, и элемент (1, 4) соответствует символу j. Декодер 107 может затем интерпретировать выходную матрицу  [4 2 5 7], таким образом, что j - с наибольшей вероятностью идентично действительному переданному символу S(n), -I - с меньшей вероятностью идентична действительному переданному символу, I - имеет еще меньшую вероятность, а символ -j с наименьшей вероятностью является идентичным действительному переданному символу S(n).
[4 2 5 7], таким образом, что j - с наибольшей вероятностью идентично действительному переданному символу S(n), -I - с меньшей вероятностью идентична действительному переданному символу, I - имеет еще меньшую вероятность, а символ -j с наименьшей вероятностью является идентичным действительному переданному символу S(n).
В предыдущем примере показана часть выходной матрицы  , сформированной в соответствии с данным принятым символом r(n) в течение одного дискретного временного интервала. При завершении всех дискретных интервалов времени выходная матрица
, сформированной в соответствии с данным принятым символом r(n) в течение одного дискретного временного интервала. При завершении всех дискретных интервалов времени выходная матрица  включает значения вероятности для всех символов принятого сигнала. Выходная матрица
включает значения вероятности для всех символов принятого сигнала. Выходная матрица  в своем полном виде представляет метрику "мягкого" решения.
в своем полном виде представляет метрику "мягкого" решения.
Выходная матрица  на выходе из декодера ПИО 107 имеет размерность, определяемую числом символов, содержащихся в переданном дифференциально кодированном сигнале
на выходе из декодера ПИО 107 имеет размерность, определяемую числом символов, содержащихся в переданном дифференциально кодированном сигнале  принятом когерентным приемником 101. Например, если дифференциально кодированный сигнал
принятом когерентным приемником 101. Например, если дифференциально кодированный сигнал  модулирован путем МФМ и имеет длину 100 символов, то при завершении 100 дискретных временных интервалов выходная матрица
модулирован путем МФМ и имеет длину 100 символов, то при завершении 100 дискретных временных интервалов выходная матрица  будет иметь размерность 100 х M. Аналогично, при модуляции путем КФМ дифференциально кодированный сигнал
будет иметь размерность 100 х M. Аналогично, при модуляции путем КФМ дифференциально кодированный сигнал  имеющий 100 символов, будет соответствовать матрице размерностью 100х4.
имеющий 100 символов, будет соответствовать матрице размерностью 100х4.
Как упоминалось ранее, алгоритм "мягкого" решения реализуется с помощью вычислителя метрики 201, из которого выходная матрица  в виде действительного переданного символа S(n) поступает в декодер ПИО 107. Это обеспечивает совместимость вычислителя метрики 201 с большинством декодеров ПИО, использующих алгоритм Витбери. Декодирующее устройство 200, показанное на фиг. 2, обладает преимуществом по сравнению с известными декодирующими устройствами, например таким, которое раскрыто со ссылкой на фиг. 1, поскольку для него не требуется дифференциальный декодер, такой как дифференциальный декодер 105, который выражает принятый сигнал через действительный переданный символ s(n), что необходимо для совместимости с декодером ПИО 107. В результате, в отличие от известного устройства, показанного на фиг. 1, декодирующее устройство 200, показанное на фиг. 2, в соответствии с настоящим изобретением обеспечивает улучшение декодирования декодером ПИО за счет непосредственного введения в него информации "мягкого" решения.
в виде действительного переданного символа S(n) поступает в декодер ПИО 107. Это обеспечивает совместимость вычислителя метрики 201 с большинством декодеров ПИО, использующих алгоритм Витбери. Декодирующее устройство 200, показанное на фиг. 2, обладает преимуществом по сравнению с известными декодирующими устройствами, например таким, которое раскрыто со ссылкой на фиг. 1, поскольку для него не требуется дифференциальный декодер, такой как дифференциальный декодер 105, который выражает принятый сигнал через действительный переданный символ s(n), что необходимо для совместимости с декодером ПИО 107. В результате, в отличие от известного устройства, показанного на фиг. 1, декодирующее устройство 200, показанное на фиг. 2, в соответствии с настоящим изобретением обеспечивает улучшение декодирования декодером ПИО за счет непосредственного введения в него информации "мягкого" решения.
На фиг. 3 представлена блок-схема, иллюстрирующая более подробно работу вычислителя метрики 201 согласно настоящему изобретению. Данный принятый символ r(n), выходящий из когерентного приемника 10 по фиг. 2, поступает в смеситель 301. Смеситель 301 смешивает данный принятый символ r(n) с символом, сопряженным данному, одну из возможных переданных символов, обеспечиваемых постоянным запоминающим устройством (ПЗУ) 303. ПЗУ 303 включает заданное множество из всех возможных передаваемых символов для конкретной схемы модуляции, используемой системой связи. Для модуляции путем МФМ в ПЗУ 303 хранится M возможных передаваемых символов, а для КФМ в ПЗУ 303 хранится только 4 возможных передаваемых символа. Из ПЗУ 303 один данный символ из возможных передаваемых символов  поступает в комплексный сопряженный преобразователь 305, входящий в числитель метрики 201. С выхода комплексного сопряженного преобразователя 305 символ, сопряженный данному, одному из возможных передаваемых символов,
поступает в комплексный сопряженный преобразователь 305, входящий в числитель метрики 201. С выхода комплексного сопряженного преобразователя 305 символ, сопряженный данному, одному из возможных передаваемых символов,  поступает в смеситель 301. Смеситель 301 смешивает данный принятый символ r(n) с символом, сопряженным данному, одному из возможных передаваемых символов
поступает в смеситель 301. Смеситель 301 смешивает данный принятый символ r(n) с символом, сопряженным данному, одному из возможных передаваемых символов  для генерации повергнутого принятого символа
для генерации повергнутого принятого символа  который далее поступает в сумматор 307.
который далее поступает в сумматор 307.
Данный принятый символ r(n) также поступает в устройство задержки 309, включенное между смесителем 301 и сумматором 307. Устройство задержки 309 обеспечивает задержку данного принятого символа r(n) на один дискретный временной интервал. По окончании одного дискретного временного интервала из устройства задержки 309 в сумматор 307 подается предыдущий принятый символ r(n-1).
Смешивание данного принятого символа r(n) и символа, сопряженного данному, одному из возможных передаваемых символов  для создания повернутого принятого символа
для создания повернутого принятого символа  в смесителе 301 выполняется для того, чтобы получить подходящую аппроксимацию предыдущего принятого символа r(n-1). Уравнение (2) показывает, что данный принятый символ r(n) непосредственно связан с дифференциально кодированной последовательностью d(n). Кроме того, уравнение (1) показывает, что дифференциально кодированная последовательность d(n) равна s(n)d(n-1) для всех дискретных временных интервалов, за исключением первого временного интервала (заметим, что в первый дискретный временный интервал (n=0) никакие символы не передаются). Следовательно, из этого вытекает, что
в смесителе 301 выполняется для того, чтобы получить подходящую аппроксимацию предыдущего принятого символа r(n-1). Уравнение (2) показывает, что данный принятый символ r(n) непосредственно связан с дифференциально кодированной последовательностью d(n). Кроме того, уравнение (1) показывает, что дифференциально кодированная последовательность d(n) равна s(n)d(n-1) для всех дискретных временных интервалов, за исключением первого временного интервала (заметим, что в первый дискретный временный интервал (n=0) никакие символы не передаются). Следовательно, из этого вытекает, что
r(m) ≈ s(n)r(n-1)
и, таким образом, r(n)s*(n) ≈ r(n-1).
Поэтому, если сопряжение данному символу, одному из возможных передаваемых символов,  соответствует сопряжению действительно переданного символа s*(n), тогда повернутый принятый символ
соответствует сопряжению действительно переданного символа s*(n), тогда повернутый принятый символ  будет приблизительно соответствовать предыдущему принятому символу r(n-1). Или, аналогично, если данный один из возможных переданных символов
будет приблизительно соответствовать предыдущему принятому символу r(n-1). Или, аналогично, если данный один из возможных переданных символов  соответствует действительно переданному символу s(n), тогда повернутый принятый символ
соответствует действительно переданному символу s(n), тогда повернутый принятый символ  будет приблизительно соответствовать предыдущему принятому символу r(n-1).
будет приблизительно соответствовать предыдущему принятому символу r(n-1).
Первый этап при установлении, соответствует ли, приблизительно, повернутый принятый символ  предыдущему принятому символу r(n-1) включает суммирование повернутого принятого символа
предыдущему принятому символу r(n-1) включает суммирование повернутого принятого символа  и предыдущего принятого символа r(n-1) с помощью сумматора 307. В результате суммирования повернутого принятого символа
и предыдущего принятого символа r(n-1) с помощью сумматора 307. В результате суммирования повернутого принятого символа  и предыдущего принятого символа r(n-1) формируется результирующий принятый символ
и предыдущего принятого символа r(n-1) формируется результирующий принятый символ  Повернутый принятый символ
Повернутый принятый символ  и предыдущий принятый символ r(n-1) могут быть реализованы в виде векторов. Векторное сложение двух приблизительно аналогичных векторов, направленных в одном и том же направлении, приводит к результирующему вектору, который приблизительно в два раза длиннее исходных векторов. В результате величина результирующего принятого символа
и предыдущий принятый символ r(n-1) могут быть реализованы в виде векторов. Векторное сложение двух приблизительно аналогичных векторов, направленных в одном и том же направлении, приводит к результирующему вектору, который приблизительно в два раза длиннее исходных векторов. В результате величина результирующего принятого символа  или более точно, длина этого вектора, непосредственно связана со степенью корректности при идентифицировании, дает ли данный, один из возможных передаваемых символов
или более точно, длина этого вектора, непосредственно связана со степенью корректности при идентифицировании, дает ли данный, один из возможных передаваемых символов  наилучшую оценку для действительного передаваемого символа s(n). Смеситель 301, устройство задержки 309 и сумматор 307 могут вместе образовывать схему объединителя. В отличие от известных алгоритмов "мягкого" решения, которые обычно только анализируют данный принятый символ, алгоритм мягкого решения вычислителя метрики 201 использует данный принятый символ r(n) и предыдущий принятый символ r(n-1) для установления идентичности действительно переданного символа s(n).
наилучшую оценку для действительного передаваемого символа s(n). Смеситель 301, устройство задержки 309 и сумматор 307 могут вместе образовывать схему объединителя. В отличие от известных алгоритмов "мягкого" решения, которые обычно только анализируют данный принятый символ, алгоритм мягкого решения вычислителя метрики 201 использует данный принятый символ r(n) и предыдущий принятый символ r(n-1) для установления идентичности действительно переданного символа s(n).
Далее, результирующий принятый символ  поступает в устройство поворота фазы 311. Устройство поворота фазы 311 поворачивает результирующий принятый символ
поступает в устройство поворота фазы 311. Устройство поворота фазы 311 поворачивает результирующий принятый символ  по всем возможным принимаемым символам. Устройство поворота фазы 311 может быть реализовано с помощью ряда параллельных смесителей, которые смешивают результирующий принятый символ
по всем возможным принимаемым символам. Устройство поворота фазы 311 может быть реализовано с помощью ряда параллельных смесителей, которые смешивают результирующий принятый символ  со всеми возможными передаваемыми символами так, чтобы генерировать повернутые результирующие принятые символы. Если используется модуляция путем МФМ, то генерируется M повернутых результирующих принятых символов. M повернутых результирующих принятых символов могут быть определены с помощью следующего уравнения
со всеми возможными передаваемыми символами так, чтобы генерировать повернутые результирующие принятые символы. Если используется модуляция путем МФМ, то генерируется M повернутых результирующих принятых символов. M повернутых результирующих принятых символов могут быть определены с помощью следующего уравнения
где для K = 0, 1, ..., M-1
для K = 0, 1, ..., M-1
представляет все из M возможных передаваемых символов. Повернутые результирующие принятые символы, которые являются векторами различных длин, представляют вероятности того, что данный, один из возможных передаваемых символов,  является действительно переданным символом s(n). Повернутый результирующий принятый символ, ближайший в векторном пространстве к одному из всех возможных переданных символов, будет представлять наилучший вариант для идентифицирования действительно переданного символа s(n) по отношению только к данному, одному из возможных переданных символов
является действительно переданным символом s(n). Повернутый результирующий принятый символ, ближайший в векторном пространстве к одному из всех возможных переданных символов, будет представлять наилучший вариант для идентифицирования действительно переданного символа s(n) по отношению только к данному, одному из возможных переданных символов  Повернутые результирующие принятые символы поступают в действительный оператор 313 по первому каналу передачи информации, имеющему пропускную способность, по меньшей мере, M.
Повернутые результирующие принятые символы поступают в действительный оператор 313 по первому каналу передачи информации, имеющему пропускную способность, по меньшей мере, M.
Действительный оператор 313 выделяет действительную часть или синфазную компоненту каждого из повернутых результирующих принятых символов. Это может быть представлено следующим уравнением:
Из действительного оператора 313 действительная часть каждого из повернутых результирующих принятых символов поступает в максимизатор 315 по второму каналу передачи информации, имеющему пропускную способность, по меньшей мере, M.
Максимизатор 315 идентифицирует, какой из повернутых результирующих принятых символов имеет максимальную действительную часть, и, как ранее указывалось, это является наилучшим вариантом для идентифицирования действительно переданного символа s(n) в отношении только к данному, одному из возможных переданных символов  Операция, выполняемая максимизатором 315, может быть представлена следующим уравнением:
Операция, выполняемая максимизатором 315, может быть представлена следующим уравнением:
Максимальный повернутый результирующий принятый символ выводится на первую позицию строки в выходной матрице  Устройство поворота фазы 311 и действительный оператор 313 могут образовывать многоканальную схему определения фазового угла, а многоканальная схема определения фазового угла и максимизатор 315 могут вместе образовывать детектор максимальной фазы.
Устройство поворота фазы 311 и действительный оператор 313 могут образовывать многоканальную схему определения фазового угла, а многоканальная схема определения фазового угла и максимизатор 315 могут вместе образовывать детектор максимальной фазы.
Помимо того, что вычислитель метрики 201 приводится в действие для каждого данного принятого символа r(n), обеспеченного когерентным приемником 101 в течение каждого временного дискретного времени посредством субдискретизации, он приводится в действие многократно за один и тот же дискретный временной интервал для обеспечения сравнения для каждого из всех возможных передаваемых символов. Метрика "мягкого" решения, поступающая в декодер ПИО 107 в выходной матрице  может быть лучше всего описана как множество из наилучших выбросов или вероятностей соответствия между всеми из действительно переданных символов и всеми из возможных переданных символов.
может быть лучше всего описана как множество из наилучших выбросов или вероятностей соответствия между всеми из действительно переданных символов и всеми из возможных переданных символов.
В кратком изложении изобретение, раскрытое выше, включает устройство и способ декодирования действительно передаваемых символов, содержащихся в сигнале, модулированном путем ФМДК. Устройство включает когерентный приемник для приема и затем субдискретизации (с частотой символов) когерентного сигнала, модулированного путем ФМДК, так, что на выходе формируется один текущий принятый символ в течение каждого временного интервала. К когерентному приемнику подсоединен вычислитель метрики, который генерирует метрику "мягкого" решения, соответствующую действительно передаваемым символам, из принимаемых символов, поступающих из когерентного приемника в течение каждого временного интервала. Вычислитель метрики смешивает одиночный текущий принятый символ с сопряжением данного, одного из всех возможных передаваемых символов, для формирования повернутого символа. Кроме того, к входу вычислителя метрики дополнительно подсоединено устройство задержки для задержки единичного данного принятого символа на один временной интервал так, чтобы на выходе формировался один предыдущий принятый символ когерентного сигнала, модулированного путем ФМДК. Одиночный предыдущий принятый символ и повернутый символ затем суммируются для формирования результирующего символа, который может идентифицировать данный, один из действительно передаваемых символов. Результирующий символ затем обрабатывается в устройстве поворота фазы, которое поворачивает результирующий символ по каждому их всех возможных передаваемых символов так, чтобы создать множество из значений вероятности, которое в дальнейшем определяет возможность того, что данный, один из всех возможных передаваемых символов, является данным, одним из действительных (истинных) передаваемых символов. Множество из значений вероятности поступает в действительный оператор для выделения действительной части этих значений вероятности, а из него в максимизатор для определения максимальной вероятности среди множества из значений вероятности. Максимальное значение вероятности образует часть метрики "мягкого" решения. Вычислитель метрики включается в работу множество раз в течение каждого временного интервала для сравнения одиночного данного принятого символа со всеми из возможных передаваемых символов. При завершении сравнения всех дискретизированных символов, составляющих когерентный сигнал, модулированный путем ФМДК, метрика "мягкого" решения выводится в декодер ПИО в форме матрицы, содержащей значения вероятности того, что каждый из возможных передаваемых символов соответствует каждому из действительных передаваемых символов.
Несмотря на то, что изобретение было раскрыто и проиллюстрировано в вышеприведенном описании и с помощью чертежей, следует иметь в виду, что это описание является только примером и что специалистами в данной области техники могут быть сделаны многочисленные изменения и модификации, не выходя за рамки сущности и объема изобретения. Изменения и модификации могут касаться, например, замены устройства поворота фазы, действительного оператора и максимизатора на действительный оператор и мнимый оператор, функционирующие параллельно, максимизатор и оператор абсолютной величины, которые обеспечивают генерацию максимального значения вероятности.
Устройство декодирования декодирует когерентный сигнал, модулированный путем многоуровневой фазовой манипуляции с дифференциальным кодированием символов (ФМДК). Когерентный приемник принимает и последовательно выводит когерентный сигнал, модулированный путем ФМДК, в вычислитель метрики. Вычислитель метрики генерирует метрику '' мягкого '' решения  соответствующую когерентному сигналу, модулированному путем ФМДК, которая выводится в декодер прямого исправления ошибок (ПИО). Декодер ПИО декодирует когерентный сигнал, модулированный путем ФМДК, в соответствии с метрикой '' мягкого '' решения
соответствующую когерентному сигналу, модулированному путем ФМДК, которая выводится в декодер прямого исправления ошибок (ПИО). Декодер ПИО декодирует когерентный сигнал, модулированный путем ФМДК, в соответствии с метрикой '' мягкого '' решения  соответствующей когерентному сигналу, модулированному путем ФМДК, что и является техническим результатом. 2 с.п. и 8 з.п.ф-лы, 3 ил.
соответствующей когерентному сигналу, модулированному путем ФМДК, что и является техническим результатом. 2 с.п. и 8 з.п.ф-лы, 3 ил.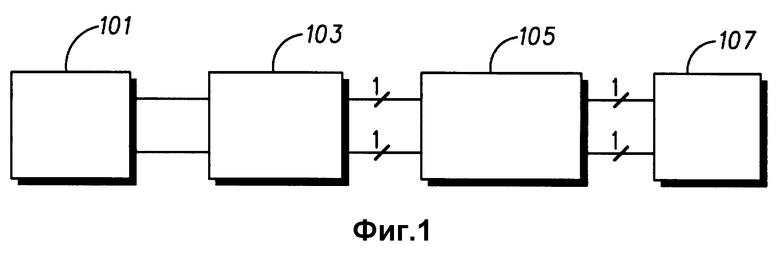
| Дж | |||
| Спилкер | |||
| Цифровая спутниковая связь /Пер | |||
| с англ./ Под ред | |||
| В.В.Маркова | |||
| -М.: Связь, 1949, с | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
| Устройство для демодуляции фазоманипулированного сигнала | 1987 |
|
SU1492484A1 |
| US 4592075 A, 27.05.86 | |||
| 0 |
|
SU83236A1 | |
