I. Область техники
Настоящее изобретение относится к средствам связи. В частности, данное изобретение относится к новому и усовершенствованному способу детектирования кадров нулевой скорости при передаче данных.
II. Предшествовавший уровень техники
Основной задачей многих современных систем связи является передача информации от устройства-источника устройству-адресату. Среди этих систем системы связи на основе множественного доступа с кодовым разделением каналов (МДКР) являются эффективными системами передачи данных, применяющими методы расширенного спектра для использования всей доступной полосы частот сигнала. В системах МДКР также используются способы повышения информационной емкости системы при обеспечении требуемого уровня качества функционирования. Данные способы включают в себя динамическую подстройку уровня мощности передачи, а также передачу данных с переменной скоростью.
В системах МДКР обмен информацией между пользователями проводится через одну или несколько базовых станций. Первый пользователь одной мобильной станции связывается со вторым пользователем другой мобильной станции посредством передачи данных по обратной линии связи на базовую станцию. Базовая станция принимает данные и может перенаправить их на другую базовую станцию. Затем данные передаются по прямой линии связи от той же самой или другой базовой станции на вторую мобильную станцию. Прямая линия связи предназначена для передачи от базовой станции на мобильную станцию, обратная линия связи предназначена для передачи от мобильной станции на базовую станцию.
Передача данных в системах МДКР осуществляется в виде кадров данных. Для повышения информационной емкости системы скорость передачи каждого кадра выбирается из набора возможных скоростей (полная скорость, скорость 1/2, скорость 1/4 и скорость 1/8) в зависимости от объема данных, который требуется передать. Для некоторых систем МДКР передача происходит через определенные (например, 20 мс) временные интервалы, при этом каждый интервал включает в себя один большой (20 мс) кадр или набор малых (5 мс) кадров. Каждый кадр может содержать или не содержать передаваемые данные. Кадр без передаваемых данных обычно называется кадром нулевой скорости (или пустым) кадром.
В случае, когда для передачи либо предоставляется меньший объем данных, либо данные вообще не передаются, использование кадров переменной и нулевой скорости позволяет повысить пропускную способность системы посредством снижения уровня мощности передачи и, таким образом, снижения уровня взаимных помех. На принимающем устройстве необходима схема детектирования для определения, был ли кадр принят корректно (так называемый хороший кадр), или принят с ошибкой (так называемый стертый или плохой кадр), или передачи данных вообще не было (так называемый кадр нулевой скорости или пустой кадр). Данная информация может потребоваться, например, для регулирования уровня мощности передачи на источнике передачи для поддержания заданного уровня качества функционирования.
Таким образом, актуальна разработка способов точной идентификации кадров нулевой скорости.
Сущность изобретения
Настоящее изобретение относится к новому и усовершенствованному способу и системе детектирования кадров нулевой скорости в принимаемых данных. Детектирование кадров нулевой скорости может быть реализовано различными способами. Обычно для принятого кадра, который не может быть достоверно декодирован, рассчитывается метрика качества, которая затем сравнивается с пороговым значением. На основе результата сравнения кадр определяется либо как переданный и полученный с ошибкой (так называемый стертый или плохой кадр), либо как кадр без передаваемых данных (так называемый кадр нулевой скорости или пустой кадр). В соответствии с различными положениями данного изобретения пороговое значение может быть 1) выбрано на основе метрик качества, рассчитанных для декодированных кадров, 2) выбрано на основе метрик качества, рассчитанных для принятых кадров, определенных как хорошие, и 3) динамически установлено на основе текущей информации, имеющейся на приемнике. Данные отличительные свойства повышают точность идентификации кадров нулевой скорости посредством принятия во внимание условий работы приемника.
Вариант осуществления изобретения предоставляет способ идентификации кадров нулевой скорости в принимаемых данных. Согласно данному способу модулированный сигнал принимается и демодулируется в соответствии с определенным форматом демодуляции для формирования демодулированных символов. Данные демодулированные символы разбиваются на некоторое количество принятых кадров. Для каждого из принятых кадров символы декодируются, и производится проверка определенных метрик декодирования (частоты появления ошибочных символов, ЦИК (циклического избыточного кода) и т.д.) для определения успешности декодирования. Если декодирование срывается или для алгоритма определения скорости (АОС) требуется каким-то образом отличить кадры нулевой скорости от стертых кадров, метрика качества рассчитывается и сравнивается с пороговым значением. Пороговое значение выбирается частично на основе метрик качества принятых кадров. Отдельный принятый кадр идентифицируется как кадр нулевой или ненулевой скорости на основе результата сравнения. Данный способ успешно применяется в системах связи МДКР.
Метрика качества может быть связана с энергией принятого кадра, расстоянием между принятым кадром и кодовым словом, соответствующим данному принятому кадру, или с какой-либо другой метрикой. Энергия может быть рассчитана как сумма квадратов символов для принятого кадра. Расстояние можно вычислить посредством декодирования принятого кадра, повторного кодирования декодированных данных (если на передающем устройстве используется несистематический код) и расчета скалярного произведения принятого кадра и декодированного или повторно кодированного кадра. Пороговое значение может быть выбрано частично на основе рассчитанных метрик качества декодированных кадров, идентифицированных как хорошие кадры. Пороговое значение также может быть установлено динамически.
Другой вариант осуществления данного изобретения представляет собой подсистему приемника в системе связи. Подсистема приемника включает в себя демодулятор, соединенный с процессором данных. Демодулятор принимает и демодулирует модулированный сигнал в соответствии с определенным форматом демодуляции с целью формирования демодулированных символов. Процессор данных предназначен для: 1) разбиения демодулированных символов на некоторое количество принятых кадров, 2) расчета метрики качества для каждого принятого кадра, 3) сравнения метрики качества для отдельного принятого кадра с пороговым значением и 4) определения на основе сравнения, является ли отдельный принятый кадр кадром нулевой или ненулевой скорости. Пороговое значение выбирается, в частности, на основе метрик качества принятых кадров.
Процессор данных может включать в себя: 1) декодер, который принимает и декодирует принятые кадры с целью формирования декодированных кадров, 2) схему проверки ЦИК, которая принимает и проверяет декодированные кадры для идентификации хороших кадров среди декодированных кадров, 3) кодер, который принимает и повторно кодирует декодированные кадры, или их комбинацию. Метрика качества может относиться к энергии, расстоянию или другим метрикам принятых кадров.
Еще один вариант осуществления данного изобретения представляет собой подсистему приемника, используемую в системе связи МДКР для идентификации кадров нулевой скорости в принимаемых данных. Подсистема приемника включает в себя демодулятор, декодер, схему проверки ЦИК и блок вычисления метрики. Демодулятор принимает и демодулирует модулированный сигнал в соответствии с определенным форматом демодуляции с целью формирования демодулированных символов. Декодер принимает демодулированные символы как множество принятых кадров и декодирует принятые кадры в декодированные кадры. Схема проверки ЦИК принимает и проверяет декодированные кадры для идентификации хороших кадров среди декодированных кадров. Блок вычисления метрики вычисляет метрику качества для каждого из множества принятых кадров, сравнивает метрику качества отдельного принятого кадра с пороговым значением и определяет на основе сравнения, является ли отдельный принятый кадр кадром нулевой или ненулевой скорости. Пороговое значение выбирается частично на основе метрик качества принятых кадров.
Перечень чертежей
Отличительные признаки, задачи и преимущества данного изобретения поясняются в подробном описании, приведенном ниже со ссылками на чертежи, на которых используется сквозная нумерация позиций:
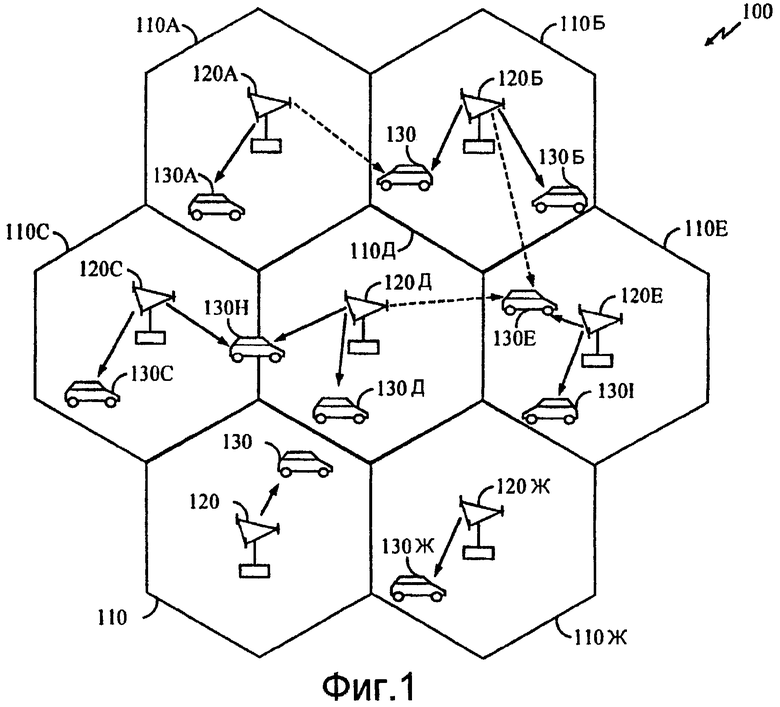
на фиг.1 представлена схема варианта осуществления системы связи, включающей многочисленные соты;
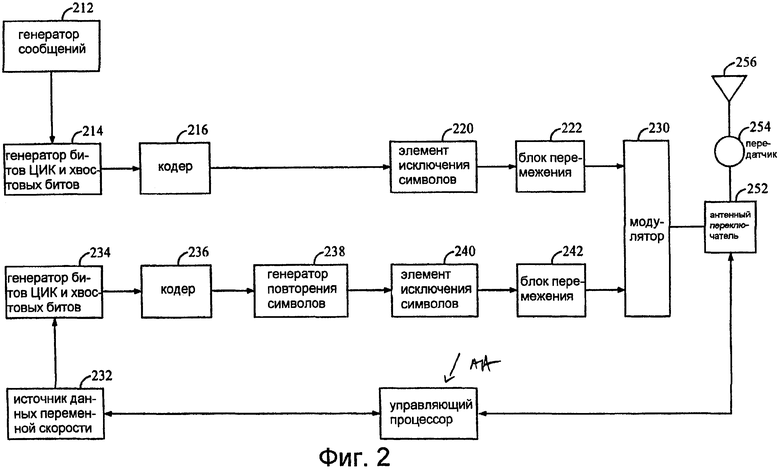
на фиг.2 представлена блок-схема варианта осуществления элемента базовой станции, формирующего сигналы основного канала и канала управления для передачи по прямой линии связи;
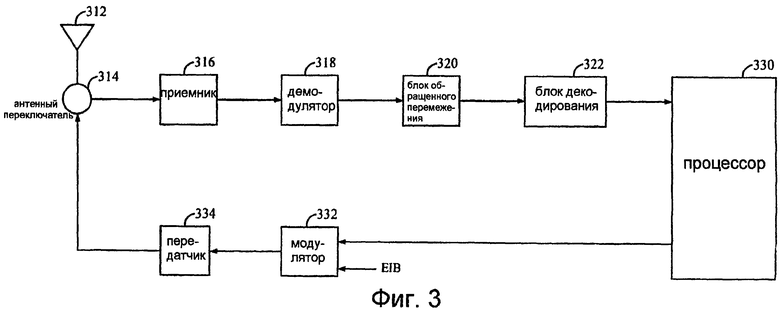
на фиг.3 приведена блок-схема варианта осуществления элемента мобильной станции, обрабатывающего сигналы основного канала и канала управления, принимаемые при передаче по прямой линии связи;
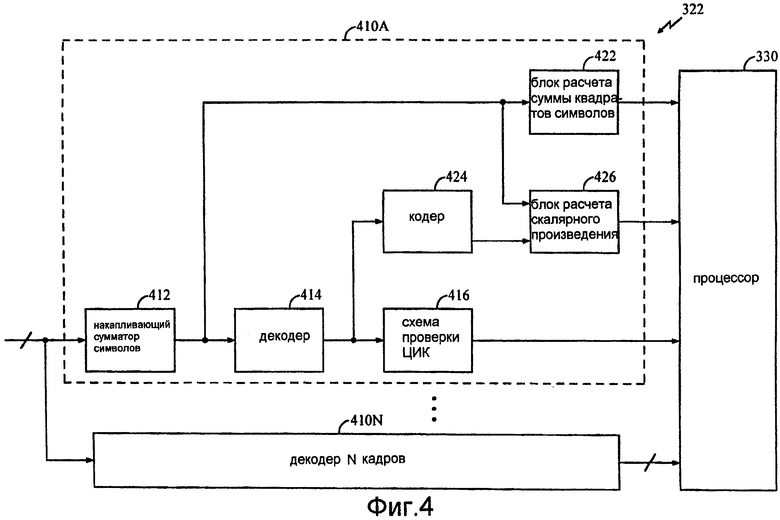
на фиг.4 представлена блок-схема варианта осуществления декодирующего элемента мобильной станции;
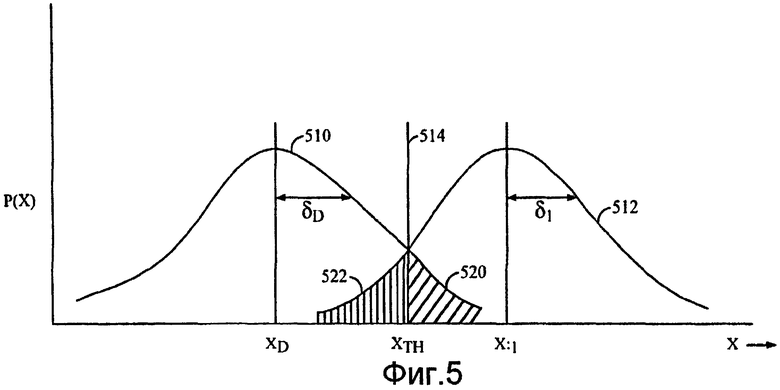
на фиг.5 представлены две функции плотности вероятности (ФПВ) для двух предположений (П0 и П1) о принятом кадре данных.
Подробное описание конкретных вариантов осуществления изобретения
На фиг.1 представлена схема варианта осуществления системы 100 связи, включающей многочисленные соты (ячейки) 110а-110ж. Каждая из сот 110 обслуживается соответствующей базовой станцией 120. Различные мобильные станции 130 разбросаны по всей системе связи. В этом варианте осуществления каждая мобильная станция 130 связывается с одной или несколькими базовыми станциями 120 по прямой и обратной линиям связи в зависимости от того, находится ли мобильная станция в режиме мягкой передачи обслуживания. На фиг.1 сплошная линия со стрелкой служит для обозначения передачи данных от базовой станции на мобильную станцию. Пунктирная линия со стрелкой используется для обозначения ситуации, когда мобильная станция принимает от базовой станции пилот-сигнал в отсутствие передачи данных. Для простоты изложения обмен информацией по обратной линии связи не приведен на фиг.1.
Как показано на фиг.1, каждая базовая станция может передавать данные одной или нескольким мобильным станциям в любой заданный момент времени. Мобильные станции, особенно те, которые находятся вблизи границы соты, могут принимать передачу данных и пилот-сигналы от многочисленных базовых станций. Если уровень пилот-сигнала некоторой базовой станции превосходит определенное пороговое значение, мобильная станция может запросить включение данной базовой станции в активный набор данной мобильной станции. В этом варианте реализации каждая мобильная станция может принимать передачу данных от нуля или более членов активного набора.
Настоящее изобретение может быть применено для систем множественного доступа с кодовым разделением каналов (МДКР), систем множественного доступа с временным разделением каналов (МДВР), систем множественного доступа с частотным разделением каналов (МДЧР), а также для других систем связи. Международный Союз Телекоммуникаций (МСТ) недавно выступил с инициативой и начал прием предложений по стандартизации способов обеспечения высокоскоростной передачи данных и высококачественных речевых служб по каналам беспроводной связи. Большинство предложений относятся к среде множественного доступа с кодовым разделением каналов. Для ясности, настоящее изобретение описывается в терминах предложения, выдвинутого Ассоциацией Промышленности Средств Связи (АПСС), озаглавленного "Предварительное Предложение по Стандартизации cdma2000 в области ТРП (Технологий Радиопередачи) для МСТ-Р (сектора Радиосвязи МСТ)" и в дальнейшем называемого IS-2000. Тем не менее, доктрины настоящего изобретения одинаково хорошо применимы для других стандартов МДКР, поданных на рассмотрение МСТ. Одно из предложений, озаглавленное "Предварительное Предложение по Стандартизации Наземного Радиодоступа (НРД) УСМТ (Универсальной Системы Мобильных Телекоммуникаций) ЕИСТ (Европейского Института Стандартов по Телекоммуникациям) в области ТРП для МСТ-Р" и в дальнейшем называемое ШМДКР, было опубликовано ЕИСТ. Содержание данных предложений хорошо известно в данной области техники и является информацией открытого характера.
На фиг.2 представлена блок-схема варианта осуществления элемента базовой станции, формирующего сигналы основного канала и канала управления для передачи по прямой линии связи. Основной канал используется для передачи основных данных от базовой станции на мобильную станцию. В случае передачи речи по основному каналу передаются речевые данные. По каналу управления на мобильную станцию передаются данные управления, такие как информация о состоянии и служебная информация. Следует отметить, что данное изобретение относится к передаче по прямой линии связи от базовой станции на мобильную станцию, при этом очевидно, что оно с равным успехом может быть применено для передачи по линии обратной линии связи от мобильной станции на базовую станцию.
Как показано на фиг.2, генератор 212 сообщений формирует управляющие сообщения и подает их на генератор 214 битов циклического избыточного кода (ЦИК) и хвостовых битов. Генератор 214 присоединяет набор битов ЦИК, используемых для проверки точности декодирования на мобильной станции. Биты ЦИК являются битами четности, генерируемыми на основе содержания определенного управляющего сообщения. Генератор 214 дополнительно присоединяет к управляющему сообщению группу хвостовых битов, служащих для очистки памяти декодера на мобильной станции. Форматированное управляющее сообщение подается далее на кодер 216, который кодирует сообщение в соответствии с определенным форматом кодирования. Кодер 216 проводит кодирование управляющего сообщения с прямым исправлением ошибок (ПИО). В конкретном варианте осуществления кодер 216 является кодером, реализующим сверточное кодирование со скоростью 1/2 или 1/4, как определено в предложении по стандартизации IS-2000. Кодированные символы из кодера 216 подаются на элемент 220 исключения символов, который исключает или, другими словами, удаляет некоторые из символов в соответствии с определенным шаблоном исключения. Оставшиеся символы подаются на блок 222 перемежения, который переупорядочивает символы в соответствии со специфическим форматом перемежения. Переупорядоченные символы подаются на модулятор 230.
Источник 232 данных переменной скорости генерирует данные с переменной скоростью. Данные могут включать в себя речь, видеоданные, факсимильные сообщения, мультимедийные данные, сообщения электронной почты и другие виды цифровой информации. Пример способа передачи данных по кодовым каналам в виде кадров фиксированной длительности описан в патенте США №5504773 на "СПОСОБ И УСТРОЙСТВО ФОРМАТИРОВАНИЯ ДАННЫХ ДЛЯ ПЕРЕДАЧИ", включенном в данный документ в качестве ссылки. В общем случае источник 232 данных переменной скорости может поддерживать любое количество скоростей, а также может поддерживать нулевую скорость, что означает отсутствие передачи данных.
В конкретном варианте осуществления источник 232 данных переменной скорости представляет собой речевой кодер переменной скорости, аналог которого описан в патенте США №5414796 на "ВОКОДЕР ПЕРЕМЕННОЙ СКОРОСТИ", переуступленном правопреемнику настоящего изобретения и включенном в данный документ в качестве ссылки. Речевые кодеры с переменной скоростью широко используются в беспроводных системах связи, так как они увеличивают ресурс батарей питания беспроводных средств связи и повышают пропускную способность системы с минимальным влиянием на качество воспринимаемой речи. Ассоциация Промышленности Средств Связи систематизировала наиболее популярные речевые кодеры с переменной скоростью в таких стандартах, как Промежуточный Стандарт IS-96 и Промежуточный Стандарт IS-733. В соответствии с уровнем речевой активности данные речевые кодеры с переменной скоростью кодируют речевой сигнал с четырьмя возможными скоростями, известными как полная скорость, скорость 1/2, скорость 1/4 или скорость 1/8. Каждая из скоростей характеризуется числом бит, используемых для кодирования речевого кадра, при этом полная скорость, скорость 1/2, скорость 1/4 и скорость 1/8 используют соответственно одну целую, половину, четверть и одну восьмую от заданного максимального числа бит для кодирования кадра. Данная скорость может изменяться от кадра к кадру.
Источник 232 данных переменной скорости подает данные в виде кадров на генератор 234 битов ЦИК и хвостовых битов. Генератор 234 присоединяет набор битов ЦИК, служащих для проверки точности декодирования на мобильной станции. Биты ЦИК являются битами четности, генерируемыми на основе содержания отдельного кадра данных. Генератор 234 также присоединяет к кадру данных группу хвостовых битов, служащих для очистки памяти декодера на мобильной станции. Форматированный кадр подается далее на кодер 236, который кодирует кадр в соответствии с определенным форматом кодирования. Кодер 236 производит кодирование данных с прямым исправлением ошибок. В конкретном варианте осуществления кодер 236 является кодером, реализующим сверточное кодирование, или турбо кодером, работающим либо со скоростью 1/2, либо 1/4, как определено в предложении по стандартизации IS-2000. Кодированные символы из кодера 236 подаются на генератор 238 повторения символов, который повторяет кодированные символы кадров меньшей скорости. Затем данные символы подаются на элемент 240 исключения символов, который исключает некоторые из символов в соответствии с определенным шаблоном исключения. Оставшиеся символы подаются на блок 242 перемежения, который переупорядочивает символы в соответствии с определенным форматом перемежения. Переупорядоченные символы подаются на модулятор 230.
В этом варианте осуществления модулятор 230 модулирует основной канал и канал управления в соответствии с определенным форматом модуляции МДКР и подает модулированный сигнал на передатчик 252. Модулятор 230 может, например, скремблировать данные длинной ПШ (псевдошумовой) последовательностью, расширить спектр сигнала данных с помощью коротких ПШ последовательностей, закодировать данные с помощью кодов Уолша, а также осуществить квадратурное модулирование данных синфазным и квадратурным несущими сигналами. Передатчик 252 усиливает, фильтрует и преобразует сигнал с повышением частоты. Сигнал прямой линии связи затем проходит через антенный переключатель 254 и передается с антенны 256. Дополнительно, элементы, изображенные на фиг.2, подробно описаны в IS-2000.
На фиг.2 приведена упрощенная блок-схема основного канала и канала управления. Для передачи данных также доступны и другие каналы, но они для простоты не изображены на фиг.2.
На фиг.3 приведена блок-схема варианта осуществления элемента мобильной станции, обрабатывающего сигналы основного канала и канала управления, принимаемые при передаче по прямой линии связи. Сигнал прямой линии связи от базовой станции принимается антенной 312 и подается через антенный переключатель 314 на приемник 316. Приемник 316 преобразует принятый сигнал с понижением частоты в сигнал с частотой полосы модулирующих частот в соответствии с форматом демодуляции, который является дополнением формата модуляции (например, КФМ (квадратурная фазовая модуляция)), применяемого на базовой станции. Сигнал полосы модулирующих частот подается далее на демодулятор 318, который демодулирует его и формирует демодулированные символы. Демодулятор 318 реализует функции, являющиеся дополнением к функциям, реализуемым на базовой станции (например, декодирование, сужение спектра, дескремблирование). Демодулированные символы подаются на блок 320 обращенного перемежения, который переупорядочивает символы в соответствии с форматом обращенного перемежения, являющимся дополнением к формату перемежения, используемому на базовой станции. Переупорядоченные символы подаются на элемент 322 декодирования, который декодирует символы с целью получения оценки переданного кадра. На основе включаемых в переданный кадр битов ЦИК (если таковые имеются) проводится оценка переданного кадра для определения точности оценки кадра. Декодированные данные подаются на процессор 330.
В этом варианте осуществления мобильная станция проводит слепое декодирование сигнала прямой линии связи. Слепое декодирование означает способ декодирования данных, передаваемых с переменной скоростью, в котором приемник не знает априори скорости передачи. В этом варианте осуществления мобильная станция выполняет обращенное перемежение, накапливает и декодирует данные в предположении каждой из возможных скоростей (полной скорости, скорости 1/2, скорости 1/4, скорости 1/8, нулевой скорости или стирания). Выбор одного из декодированных кадров как наилучшей оценки основывается на одной или нескольких метриках качества, таких как частота появления ошибочных символов, результат проверки ЦИК, метрика Ямамото, энергия кадра или других метриках.
На фиг.3 также приведены некоторые элементы схемы, используемой для передачи битов индикатора стирания (БИС) на базовую станцию, необходимых для регулирования мощности прямой линии связи. В этом варианте осуществления БИС мультиплексируются с данными трафика обратной линии связи и подаются на модулятор 322, который объединяет БИС с данными трафика в определенных позициях, как описано в предложении по стандартизации IS-2000. Объединенные БИС и данные трафика модулируются модулятором 332, использующим определенный формат модуляции. Модулированные данные подаются на передатчик 334, который преобразует с повышением частоты, усиливает и фильтрует сигнал перед передачей на базовую станцию через антенну 312. В этом варианте реализации сигнал обратной линии связи является сигналом МДКР, который модулируется в соответствии с предложением IS-2000.
Для повышения пропускной способности системы система МДКР была разработана таким образом, что данные передаются в виде кадров различного формата и скорости. Каждый из форматов кадра характеризуется длительностью кадра, определенным форматом кодирования и (возможно) некоторыми другими атрибутами. Например, в соответствии с предложением по стандартизации IS-2000, данные передаются в виде кадров длительностью 5 мс или 20·L мс, где L равно 1, 2 или 4. Скорость каждого из кадров длительностью 20·L мс также может быть выбрана из набора возможных скоростей (например, восьми или более скоростей) в зависимости от объема данных, которые должны быть переданы, и других соображений. Для системы, совместимой с IS-2000, передача происходит через временные интервалы длительностью 20 мс, при этом каждый интервал включает в себя один кадр длительностью 20 мс, четыре кадра длительностью 5 мс или часть более длительного кадра. Каждый кадр может содержать или не содержать в себе передаваемые данные. Для кадра длительностью 5 мс требуется меньшая временная задержка на обработку, что обуславливает особую эффективность его использования для передачи управляющих сообщений, действие в соответствии с которыми должно происходить как можно быстрее. Как определено на данный момент в предложении по стандартизации IS-2000, кадры нулевой скорости могут передаваться как кадры длительностью 5 мс или 20 мс по выделенному каналу управления (например, в отсутствие передачи управляющих сообщений) или передаваться по основному каналу, когда передатчик выключен. Кадр нулевой скорости может быть также передан по отдельному (например, дополнительному) каналу при условии, что по нему не передается информация (например, речевые данные).
На фиг.4 представлена блок-схема варианта осуществления элемента 322 декодирования. Демодулированные данные с блока 320 обращенного перемежения подаются на набор декодеров 410а-410n. Каждый из декодеров 410 кадров может декодировать кадр данных, основываясь на определенном предположении декодирования (например, на формате и скорости кадра). Процессор данных можно сконструировать таким образом, чтобы он включал в себя все элементы, дополнительные элементы и/или подгруппу элементов декодера 410 кадров.
При передаче по линии прямой линии связи передача данных с пониженной скоростью достигается посредством повторения каждого кодового символа N раз (где N равно 1, 2, 4 или 8) для достижения заданной скорости символов. Помимо этого, энергия каждого передаваемого символа понижается в N раз для обеспечения приблизительно одинакового значения энергии на один кодовый символ. На стороне приемника группы из N повторенных символов накапливаются и масштабируются с целью получения объединенного символа мягкого решения, который является отображением исходного кодового символа.
В каждом декодере 410 кадров демодулированные данные подаются на накапливающий сумматор 412 символов, который накапливает группы из N принятых символов, основываясь на предполагаемой скорости 1/N. Например, если декодер кадров настроен на декодирование кадров скорости 1/8, накапливающий сумматор 412 символов накапливает группы из восьми принятых символов с целью получения символа мягкого решения для каждой группы. Каждый символ мягкого решения является отображением исходного кодового символа, посланного с передающего устройства. Символы мягкого решения подаются на декодер 414, который декодирует символы для получения декодированных данных. Декодер 414 разработан на основе кодера, используемого на источнике передачи. Например, декодер Витерби используется преимущественно для декодирования данных, кодированных сверточным кодированием. Декодер 414 или другие внешние схемы могут быть дополнительно модифицированы для получения метрики качества кадра, в качестве которой может выступать частота появления ошибочных символов, результат проверки ЦИК, метрика качества Ямамото или их комбинация, которая используется для определения качества декодирования кадра. Метрика качества Ямамото особенно эффективна для малых скоростей, когда биты ЦИК недоступны.
Эффективная схема декодирования данных описана в патенте США №5933462 на "ДЕКОДЕР, ВЫДАЮЩИЙ СИМВОЛЫ МЯГКОГО РЕШЕНИЯ, ДЛЯ ДЕКОДИРОВАНИЯ КЛЮЧЕВЫХ СЛОВ, КОДИРОВАННЫХ СВЕРТОЧНЫМ КОДИРОВАНИЕМ" и патенте США №5710784 на "МНОГОСКОРОСТНОЙ ПОСЛЕДОВАТЕЛЬНЫЙ ДЕКОДЕР ВИТЕРБИ ДЛЯ ПРИЛОЖЕНИЙ СИСТЕМ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ", переуступленных правопреемнику настоящего изобретения и включенных в данный документ в качестве ссылки.
В предположении о некоторой скорости передачи, подразумевающем наличие битов ЦИК, декодированные данные подаются на схему 416 проверки ЦИК, которая осуществляет проверку битов ЦИК, присоединенных к каждому декодированному кадру. Проверка ЦИК широко известна в данной области техники и дополнительно определяется стандартом МДКР, используемым в реализации (например, IS-95-A или IS-2000). В этом варианте осуществления схема 416 проверки ЦИК выдает однобитовый результат для каждого проверенного кадра. В конкретном варианте осуществления результат проверки ЦИК является логическим нулем ("0"), если проверка ЦИК показывает, что кадр хороший, и логической единицей ("1"), если проверка ЦИК показывает, что кадр плохой (например, стертый или пустой).
Элемент 322 декодирования может быть разработан в различных конфигурациях. Например, для систем, совместимых с IS-2000, элемент 322 декодирования может включать в себя набор декодеров 410 кадров, работающих параллельно, при этом каждый декодер настроен для декодирования в соответствии с определенным предположением декодирования. Определение скорости может быть реализовано на основе частоты появления ошибочных символов, результата проверки ЦИК, метрик качества Ямамото, других метрик или их комбинации. Один из таких декодеров описан в патенте США №5774496 на "СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ИНФОРМАЦИОННОЙ СКОРОСТИ ДАННЫХ, ПЕРЕДАННЫХ С ПЕРЕМЕННОЙ СКОРОСТЬЮ, В ПРИЕМНОМ УСТРОЙСТВЕ СИСТЕМЫ СВЯЗИ", переуступленном правопреемнику настоящего изобретения и включенном в данный документ в качестве ссылки.
Для наглядности на фиг.4 показано, что элемент 322 декодирования использует многочисленные параллельные пути обработки демодулированных символов. Тем не менее, в некоторых реализациях для сокращения количества требуемых элементов схемы оказывается предпочтительным использование единственного пути декодирования с совместно используемыми элементами схемы. В реализациях декодера с совместным использованием элементов схемы демодулированные символы хранятся в буфере (на фиг.3 не изображен), так как они принимаются и многократно подаются на декодер кадров для декодирования. Декодер кадров реконфигурируется для разных предположений декодирования для каждого прохождения данных. Можно рассмотреть и другие реализации элемента 322 декодирования, находящиеся в сфере применения данного изобретения.
Детектирование кадров нулевой скорости необходимо для многих приложений. В системе IS-2000 на основе кадров, переданных по прямой линии связи и декодированных на мобильной станции, реализован механизм управления мощностью, с помощью которого осуществляется регулирование мощности передачи сигнала прямой линии связи. Мобильная станция декодирует кадры, переданные по прямой линии связи, и определяет, являются ли данные кадры хорошими, стертыми или непереданными. На основе этих декодированных кадров базовая станция регулирует энергию передачи прямой линии связи. Например, базовой станции может быть предписано снижать мощность передачи на мобильную станцию, если декодированный кадр плохой (или стертый), или ничего не менять, если детектируется отсутствие передачи данных (или нулевая скорость). Качество связи и пропускная способность системы частично зависят от способности точного определения стертых кадров и кадров нулевой скорости.
IS-2000 определяет механизм регулирования мощности для прямой линии связи. Конкретнее, при работе в определенных заданных режимах требуется, чтобы мобильная станция установила все биты управления мощностью, передаваемые по Обратному Подканалу Управления Мощностью в течение временного интервала в 20 мс, равными БИС, который определяется следующим образом:
1) БИС устанавливается равным "0" во втором переданном кадре, следующим за детектированием хорошего кадра длительностью 20 мс, переданного по прямому основному каналу или прямому выделенному каналу управления.
2) БИС устанавливается равным "0" во втором переданном кадре, следующим за детектированием по меньшей мере одного хорошего кадра длительностью 5 мс без детектирования каких-либо плохих (например, стертых) кадров длительностью 5 мс.
3) БИС устанавливается равным "1" во втором переданном кадре во всех остальных случаях.
В таблице 1 приведена спецификация IS-2000 для различных сценариев декодирования.
Как следует из таблицы 1, БИС устанавливается равным низкому логическому уровню, если: 1) принятый кадр длительностью 20 мс декодирован как хороший кадр или 2) по меньшей мере один из принятых кадров длительностью 5 мс декодирован как хороший кадр, и при этом плохой (например, стертый) кадр не был детектирован. Кадр может быть идентифицирован как хороший посредством выполнения проверки ЦИК для декодированного кадра. Во втором случае, когда по меньшей мере один из принятых кадров длительностью 5 мс декодирован как хороший, для остальных кадров длительностью 5 мс во временном интервале длительностью 20 мс требуется идентификация, являются ли они плохими или пустыми. Таким образом, для данного случая требуется детектирование кадров нулевой скорости.
Согласно таблице 1 в случае, когда БИС равен нулю, декодер имеет информацию по меньшей мере из одного хорошего кадра. В соответствии с аспектом настоящего изобретения для повышения точности детектирования информация из хороших кадров может быть использована для содействия определению, является ли декодированный кадр плохим или пустым.
Детектирование кадров нулевой скорости может быть реализовано различными способами. В общем случае для принятого кадра рассчитывается метрика качества, которая затем сравнивается с пороговым значением. На основе результата сравнения кадр определяется либо как переданный и полученный с ошибкой (так называемый стертый или плохой кадр), либо как вообще не передаваемый кадр (так называемый кадр нулевой скорости или пустой кадр). В соответствии с другим аспектом данного изобретения пороговое значение может быть выбрано на основе метрик качества, рассчитанных для принятых (и, возможно, декодированных) кадров. В соответствии с другим аспектом данного изобретения пороговое значение может быть выбрано на основе метрик качества, рассчитанных для принятых кадров, определенных как хорошие. В соответствии с еще одним аспектом данного изобретения пороговое значение может быть динамически установлено на основе текущей (или будущей информации, если текущее решение задержано) информации, имеющейся на приемнике. Данные отличительные свойства повышают точность идентификации кадров нулевой скорости посредством принятия во внимание рабочих параметров приемника.
Один из способов детектирования кадров нулевой скорости основывается на вычислении суммы квадратов символов и сравнении ее с некоторым пороговым значением. Сумма квадратов символов служит мерой энергии принятого кадра. Если рассчитанная энергия превышает пороговое значение энергии, это служит признаком имевшей место передачи данных. Если же рассчитанная энергия меньше порогового значения, то это указывает на отсутствие передачи данных.
На фиг.4 представлена блок-схема элемента детектирования кадров нулевой скорости с использованием суммы квадратов символов. С накапливающего сумматора 412 символов символы мягкого решения подаются на блок 422 вычисления суммы квадратов символов. Блок 422 возводит в квадрат каждое значение из полученных символов мягкого решения, содержащихся в отдельном кадре, и вычисляет сумму квадратов символов по всему кадру. Результат суммирования, представляющий рассчитанную энергию кадра, передается процессору 330. В этом варианте осуществления процессор 330 рассматривает два предположения относительно рассчитанного значения энергии, а именно:
П0 - рассчитанная энергия содержит только шум;
П1 - рассчитанная энергия содержит сигнал и шум.
В частности, процессор 330 определяет, насколько вероятно предположение, что рассчитанная энергия скорее всего содержит только шум (т.е. предположение П0) или же полезный сигнал и шум (т.е. предположение П1). В зависимости от результата полученный кадр идентифицируется или как стертый, или как кадр нулевой скорости. Более подробно подход к определению кадров нулевой скорости описан ниже.
Вычисление шум или же сигнал плюс шум сигнала конкретного канала связи подробно описаны в патенте США №5903554 на "СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ КАЧЕСТВА СВЯЗИ В СИСТЕМЕ СВЯЗИ С РАСШИРЕННЫМ СПЕКТРОМ", переуступленном правопреемнику настоящего изобретения и включенном в данный документ в качестве ссылки.
Во втором способе идентификации кадров с нулевой скоростью декодированные символы кодируются повторно и коррегируют с символами мягкого решения. Для каждого отдельного кадра вычисляется скалярное произведение между (кодированными) символами мягкого решения и повторно кодированными символами. Скалярное произведение служит мерой расстояния между вектором принятых данных (т.е. принятым кадром) и его ближайшим кодовым словом (т.е. повторно кодированным кадром). Вычисленное таким образом расстояние сравнивается с пороговым значением расстояния. Если вычисленное расстояние меньше порогового значения, то это служит признаком имевшей место передачи данных. Если же вычисленное расстояние больше порогового, то это указывает на отсутствие передачи данных.
На фиг.4 приведена блок-схема элемента, детектирующего кадры нулевой скорости посредством вычисления расстояния. Декодер 414 подает декодированные биты данных на кодер 424, который кодирует биты согласно тому же самому формату кодирования, который применялся на источнике передачи для определенного предположения декодирования. Например, согласно предложению IS-2000, кодер 424 является кодером, реализующим сверточное кодирование, или турбокодером, работающим со скоростью 1/2 или 1/4. С кодера 424 кодированные символы подаются на блок 426 вычисления скалярного произведения, который также получает символы мягкого решения с накапливающего сумматора 412 символов. Блок 426 вычисления скалярного произведения использует хорошо известные в данной области техники способы для вычисления скалярного произведения между символами мягкого решения и повторно кодированными символами и подает результат на процессор 330. Скалярное произведение служит мерой расстояния между полученным и повторно кодированным кадрами. Процессор 330 рассматривает для вычисленного расстояния два описанных выше предположения.
В третьем способе идентификации кадров нулевой скорости, который является вариантом второго способа, декодированные биты данных коррелируют с символами мягкого решения. Если используется систематический код, то кодированные данные содержат как исходные данные, так и кодированные данные (контроля по четности). Указанное свойство позволяет коррелировать декодированные биты данных с порцией исходных данных в составе кодированных данных (т.е. с символами мягкого решения). Такой способ устраняет необходимость в повторном кодировании, что упрощает схему декодирования и сокращает время обработки, необходимое для идентификации кадров нулевой скорости. Этот способ особенно пригоден для использования в системе, совместимой с IS-2000 и использующей систематическое турбокодирование в дополнительном канале прямой линии связи.
В вышеприведенном описании метрики качества вычисляются для каждого принимаемого кадра. Однако и это является частью настоящего изобретения, метрику качества можно вычислять для части кадра или сразу для нескольких кадров.
Во многих системах МДКР по прямой и обратной линиям связи передается пилот-сигнал, обеспечивающий для принимающей станции возможность выполнения различных функций. В процессе обработки сигнала пилот-сигнал выделяется и применяется для когерентной демодуляции сигнала прямой линии связи. Таким образом, демодулированный символ содержит параметр, связанный с энергией пилот-сигнала.
Фиг.4 включает в себя схему, применяемую для вычисления различных метрик качества (т.е. энергии и расстояния) в целях идентификации кадров нулевой скорости. Обычно вычисляется только какая-то одна метрика качества, и декодер кадров по фиг.4 можно упростить. Само вычисление метрики качества также можно осуществить разными способами, как, например, посредством применения аппаратных средств, специально созданных для вычисления описанных здесь функций, или посредством применения программного обеспечения, запрограммированного на выполнение описанных функций, или же с помощью комбинации двух этих способов. Например, блок 422 вычисления суммы квадратов символов можно реализовать в виде программы, выполняемой процессором 330. Процессор 330 может быть реализован в микроконтроллере, микропроцессоре, цифровом сигнальном процессоре (ЦСП) или же специализированной интегральной схеме (СИС), запрограммированной на выполнение описанных здесь функций.
Как отмечалось выше, для того, чтобы определить, является ли полученный кадр кадром нулевой скорости или стертым кадром, рассчитанная для кадра метрика качества сравнивается с пороговым значением. Метрикой качества может служить рассчитанная согласно первому способу энергия, рассчитанное согласно второму или третьему способу расстояние или же другие метрики. Критерии оценки с использованием метрик энергии и расстояния прямо противоположны друг другу. А именно, наличие кадра нулевой скорости наиболее вероятно тогда, когда вычисленная энергия мала, а вычисленное расстояние велико. Ради простоты, нижеследующее описание оперирует вычисленной энергией, однако его можно легко изменить для случая вычисленного расстояния или каких-либо других метрик.
На фиг.5 представлены две функции плотности вероятности (ФПВ) для двух введенных выше предположений (П0 и П1) о принятом кадре данных. ФПВ 510 соответствует предположению П0, в котором вычисленная энергия в основном содержит шум, а ФПВ 512 соответствует предположению П1, в котором вычисленная энергия содержит сигнал и шум. ФПВ 510 характеризуется средним значением х0 и среднеквадратичным отклонением σ0. ФПВ 512 характеризуется средним значением x1 и среднеквадратичным отклонением σ1. Как и следует ожидать, среднее значение ФПВ 510 меньше, чем среднее значение ФПВ 512. Расстояние между х0 и x1 соответствует средней энергии сигнала принимаемых кадров.
Если известны ФПВ 510 и 512, то порог 514 можно установить равным такому значению хп, при котором достигается желаемый результат. Например, если желательно получить одинаковую вероятность обнаружения ошибки для каждого из предположений, то пороговое значение хп1 нужно выбирать таким образом, чтобы площадь 520 под кривой ФПВ 510 справа от хп1 и площадь 522 под кривой ФПВ 512 слева от хп1 были равны. Если пороговое значение установлено меньше хп1 (сдвинуто к х0), то вероятность отсутствия предположения П1 уменьшается, но возрастает вероятность ошибочного определения случая, соответствующего предположению П0. То есть, если пороговое значение устанавливается меньше хп1, рассчитанное значение, относящееся к предположению П1, скорее всего будет идентифицировано правильно, однако рассчитанное значение, относящееся к предположению П0, скорее всего будет идентифицировано неправильно.
Выбор желаемого результата может зависеть от разных соображений. Например, если идентификация кадров нулевой скорости используется для управления мощностью передачи источника передачи, то может оказаться предпочтительным ошибаться в сторону передачи энергии большей, чем необходимо (что может привести к снижению пропускной способности системы), чем в сторону передачи энергии меньшей, чем требуется (что может отрицательно сказаться на качестве функционирования).
В этом варианте осуществления изобретения ФПВ 510 приблизительно рассчитывается на основе вычисленных метрик для пустых кадров, а ФПВ 512 приблизительно рассчитывается на основе вычисленных метрик для хороших или плохих кадров. Как уже отмечалось выше, определить, был ли кадр декодирован правильно (т.е. является ли кадр хорошим), можно по результату проверки ЦИК. Кадры, не прошедшие проверку ЦИК, считаются или плохими, или пустыми. В этом варианте осуществления изобретения такие статистические параметры как среднее значение и среднеквадратичное отклонение вычисляются или оцениваются для номинальных условий эксплуатации. Впоследствии статистические параметры вычисляются с использованием информации от хороших и плохих кадров по мере того, как они принимаются в процессе работы. Среднее значение и среднеквадратичное отклонение можно вычислить и для метрик, относящихся к пустым кадрам. Изначально значения статистических параметров для пустых кадров можно оценить исходя из полной мощности шумов Nt известного канала (например, канала, по которому передаются пилот-сигналы). Способ оценки Nt раскрыт в упоминавшемся выше патенте США №5903554.
В этом варианте осуществления изобретения предполагается, что рассматриваемые ФПВ являются распределениями Гаусса. Форма Гауссовой ФПВ однозначно задается средним значением и среднеквадратичным отклонением. ФПВ 512 можно определить с помощью среднего значения и среднеквадратичного отклонения для хороших и плохих кадров, а ФПВ 510 можно определить с помощью среднего значения и среднеквадратичного отклонения для пустых кадров. Как описано выше, зная эти ФПВ, можно выбрать такое пороговое значение хп, при котором достигается желаемый результат.
В целях детектирования кадров нулевой скорости рассчитанная для отдельного кадра метрика сравнивается с пороговым значением хп. Если рассчитанная метрика меньше порогового значения хп, то кадр идентифицируется как кадр нулевой скорости или пустой кадр. И, наоборот, если рассчитанное значение метрики больше порогового значения хп, то кадр идентифицируется как плохой или стертый кадр. Следует отметить, что если в роли метрики качества используется рассчитанное расстояние между принятым и декодированным кадрами, то применяется другой критерий отбора.
Величину порогового значения хп можно подобрать с учетом дополнительной информации, имеющейся на приемнике. Например, так как начальная оценка ФПВ 512 для предположения П1 делается на основе кадров, которые заведомо считаются хорошими, а хорошие кадры обычно содержат больше энергии, чем стертые, среднее значение x1 будет несколько выше, чем истинное среднее значение для предположения П1. Таким образом, пороговое значение хп можно немного сместить влево от x1. Иначе говоря, так как рассчитанная метрика заведомо получена на основе пустых (т.е. в отсутствие передачи) или плохих кадров (с низкой принимаемой энергией, что, возможно, и есть причина, по которой кадр декодируется, как стертый), то весьма вероятно, что она будет иметь меньшее значение, и пороговое значение должно быть сдвинуто влево соответственно. Величину этого сдвига можно определить с помощью компьютерного моделирования системы, экспериментальных измерений или другими способами. Например, можно провести лабораторные измерения для ряда передаваемых кадров. Среднее значение разности между рассчитанными метриками для хороших и плохих кадров может быть определено и сохранено в качестве параметра в приемном устройстве. Затем рассчитанное среднее значение для хороших кадров можно сдвинуть на величину этой средней разности и получить оценку среднего значения для плохих кадров. Затем пороговое значение можно устанавливать на основе предполагаемых среднего значения для плохих кадров и среднего значения для пустых кадров.
Величину порогового значения можно также подобрать с учетом другой имеющейся информации, например информации управления мощностью. Для обеспечения определенного уровня качества функционирования связи (т.е. определенной частоты появления ошибочных кадров) на приемном устройстве мощность передачи источника передачи управляется контуром управления мощностью. В одной из реализации контур управления мощностью измеряет качество (т.е. отношение Еb/Nt) принимаемого сигнала, сравнивает измеренное качество сигнала с контрольным значением и регулирует мощность передачи источника передачи так, чтобы поддерживать качество сигнала на заданном уровне. Контрольное значение выбирается таким образом, чтобы достигалось желаемое качество функционирования. В данной реализации пороговое значение можно сдвинуть, например, на величину разности между контрольными значениями для хороших и плохих кадров. Так, если контрольное значение для корректно декодированных кадров составляет 5 Дб, а для некорректно декодированных кадров составляет 4 Дб, то пороговое значение можно сдвинуть вниз на 1 Дб.
Величину порогового значения можно также регулировать в схеме декодирования с решающей обратной связью. Начальная величина порогового значения выбирается на основе имеющейся на этом этапе информации, такой как первичная оценка статистических параметров для пустых кадров и плохих кадров. На последующих этапах декодирования информация от некорректно декодированных кадров используется для итерационного уточнения статистических параметров ФПВ 510 и 512. Например, некорректно декодированный кадр может оказаться или пустым, или плохим. Рассчитанная для этого кадра метрика используется для уточнения статистических параметров или ФПВ 510, или ФПВ 512 соответственно. Таким образом, уже декодированные данные применяются для декодирования последующих данных (через уточнение порогового значения).
При определении нулевой скорости условия работы конкретного приемника принимаются во внимание посредством подбора порогового значения хп с учетом параметров, рассчитанных на приемнике. Например, если для поддержания заданного уровня качества функционирования приемнику требуется больше мощности, этот факт будет учитываться при выборе порогового значения.
Величина порогового значения также может динамически меняться с изменением условий работы. Рассчитанные статистические параметры (т.е. среднее значение и среднеквадратичное отклонение) можно определить с помощью средневзвешенных значений вычисленных метрик. Можно реализовать различные весовые схемы. Например, всем значениям метрик могут быть приписаны равные веса, или более новым значениям метрик приписываются большие веса (т.н. осреднение "с утечкой"), или используются другие весовые схемы (например, больший вес имеют кадры, расположенные вблизи хороших кадров).
При установке порогового значения могут приниматься во внимание и другие различные факторы. Например, при подстройке порогового значения можно использовать контрольные значения для корректно и некорректно декодированных кадров. Контрольные значения можно осреднять описанными выше образами. Величина подстройки порогового значения также может зависеть от, например, количества отводов - “каналов приема” в многоотводном приемнике, который используется для демодуляции сигнала.
В целях простоты изложения, многие из положений настоящего изобретения описаны для случая детектирования кадров нулевой скорости в прямой линии связи. В обратной линии связи некоторых систем МДКР (в частности, IS-95-B) кодовые символы с меньшей скоростью передаются на полной мощности, но при передаче располагаются псевдослучайно в одной из N возможных символьных позициях. Например, при передаче на скорости 1/8 каждый кодовый символ передается в одной из восьми возможных символьных позициях, при этом эта символьная позиция выбирается длинной ПШ последовательностью. Селектор приемника базовой станции выбирает кодовые символы из надлежащих позиций на основе предполагаемой скорости передачи. Таким образом, в этом случае декодер базовой станции включает в себя селектор вместо накапливающего сумматора символов. Развернутое описание декодера сигнала обратной линии связи в системе МДКР IS-2000 можно найти в упоминавшемся ранее предложении по стандартизации IS-2000.
В целях простоты изложения многие из аспектов настоящего изобретения описаны для конкретной его реализации в составе системы МДКР, соответствующей требованиям IS-2000. Однако настоящее изобретение может быть приспособлено для использования и в других системах МДКР. Один из специфических вариантов системы МДКР раскрыт в патенте США №4901307 на "СИСТЕМУ СВЯЗИ РАСШИРЕННОГО СПЕКТРА С МНОЖЕСТВЕННЫМ ДОСТУПОМ, ИСПОЛЬЗУЮЩУЮ СПУТНИКОВЫЕ ИЛИ НАЗЕМНЫЕ РЕТРАНСЛЯТОРЫ" и патенте США №5103459 на "СИСТЕМУ И СПОСОБ ГЕНЕРАЦИИ СИГНАЛОВ В СИСТЕМЕ СОТОВОЙ ТЕЛЕФОНННОЙ СВЯЗИ МКДР". Еще один специфический вариант системы МДКР раскрыт в патентной заявке №08/963386 на "СПОСОБ И УСТРОЙСТВО ВЫСОКОСКОРОСТНОЙ ПАКЕТНОЙ ПЕРЕДАЧИ ДАННЫХ", поданной 3 ноября 1997 года. Перечисленные патенты и патентные заявки переуступлены правопреемнику настоящего изобретения и включены в данный документ в качестве ссылок.
Системы МДКР можно разработать в соответствии с рядом существующих на настоящий момент стандартов на системы МДКР, а также согласно как уже внесенным на рассмотрение, так и вносимым в будущем стандартам. Например, система МДКР может быть разработана в соответствии со "Стандартом АПСС / АЭП (Ассоциации Электронной Промышленности) / IS-95-A на Совместимость Мобильных и Базовых станций в Широкополосной Двухрежимной Системе Сотовой Связи с Расширенным Спектром" или со стандартами АПСС / АЭП / IS-98-A, -В и -С, озаглавленными "Стандарт на Рекомендованный Минимальный Уровень Качества Функционирования Мобильных Станций в Системе Двухрежимной Сотовой Связи с Расширенным Спектром и в Системе ПУС (Персональных Услуг Связи)", далее именуемые как IS-95-A и IS-98 соответственно. Система МДКР может также быть разработана в соответствии со стандартами IS-2000 и ШМДКР, которые были предложены органами стандартизации ЕИСТ и АРПРВ (Ассоциация Радиопромышленности и Радиовещания). Указанные разновидности стандартов МДКР включены в данный документ в качестве ссылок.
Настоящее изобретение может быть также приспособлено для использования в системах связи других типов, как то: в системе множественного доступа с временным разделением каналов (МДВР), в системе множественного доступа с частотным разделением каналов (МДЧР) и в системах, построенных по схеме амплитудной модуляции (AM), например, по схеме амплитудной модуляции с компандированием на одной боковой полосе (АМКОБП).
Приведенное выше описание предпочтительных вариантов осуществления предоставлено для того, чтобы любой специалист в данной области мог воспроизвести или использовать настоящее изобретение. Для специалистов в данной области различные модификации данных вариантов осуществления будут очевидны, а общие принципы, определенные в данном документе, могут быть применены к другим вариантам осуществления без использования дополнительного изобретательства. Таким образом, предполагается, что настоящее изобретение не ограничивается одними лишь приведенными вариантами осуществления, а представляет собой самый широкий объем, соответствующий раскрытым в настоящем описании принципам и новым отличительным признакам.
Изобретение относится к системам связи, в частности к способам и устройствам детектирования кадров нулевой скорости (кадр без передаваемых данных) при передаче данных. Техническим результатом является повышение точности идентификации кадров нулевой скорости. Технический результат достигается тем, что модулированный сигнал принимается и демодулируется в соответствии с определенным форматом демодуляции с целью формирования демодулированных символов, которые разбиваются на некоторое количество принятых кадров, для каждого из принятых кадров метрика качества рассчитывается и сравнивается с пороговым значением, пороговое значение выбирается частично на основе метрик качества принятых кадров, на основе результата сравнения принятый кадр идентифицируется либо как кадр, который был передан и принят с ошибкой (так называемый стертый или плохой кадр), либо как кадр, не содержащий передаваемых данных (кадр нулевой скорости), метрика качества может быть связана с энергией принятого кадра, расстоянием между принятым кадром и кодовым словом, соответствующим принятому кадру, а пороговое значение выбирается на основе метрик качества, рассчитанных для декодированных кадров или принятых кадров, определенных как хорошие, или устанавливается динамически на основе текущей информации, имеющейся на приемнике. 3 н. и 25 з.п. ф-лы, 5 ил., 1 табл.
| СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ТЕКУЩЕГО РЕЧЕВОГО КАДРА В РАДИОСИСТЕМЕ МНОГОСТАНЦИОННОГО ДОСТУПА С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1994 |
|
RU2130693C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О КАЧЕСТВЕ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2113061C1 |
| ЧУГУН | 2006 |
|
RU2318035C1 |
| US 5113400 A1, 12.05.1992 | |||
| US 5710784 A1, 28.01.1998. | |||

