Изобретение относится к области приборостроения и может быть использовано в инерциальных навигационных системах подвижных объектов.
Известны различные компенсационные маятниковые акселерометры, позволяющие идентифицировать смещение нуля измерительного тока акселерометра [Липтон А. Выставка инерциальных систем на подвижном основании. - М.: Наука, 1971, стр. 67]. Недостатком таких компенсационных акселерометров является необходимость механического разворота входной оси маятникового акселерометра на 180o, что не позволяет использовать данное устройство в бесплатформенных инерциальных навигационных системах. Наиболее близким по техническому исполнению к предложенному устройству является компенсационный маятниковый акселерометр [Командно-измерительные приборы под редакцией В.И. Назарова. - М., Министерство обороны СССР, 1975, с. 39], содержащий инерционную массу в виде маятника, датчик угла, датчик момента, усилитель обратной связи, причем выход датчика угла подключен ко входу усилителя обратной связи. Недостатком такого устройства является невозможность калибровки масштабного коэффициента.
Заявленное изобретение направлено на высокоточное решение задачи калибровки смещения нуля и масштабного коэффициента.
Подобная задача возникает при разработке и эксплуатации инерциальных навигационных систем.
Сущность устройства состоит в том, что в устройство введены второй маятниковый акселерометр, включающий маятник, датчик угла, датчик момента, усилитель обратной связи, вход которого соединен с выходом датчика угла, устройство управления, коммутатор, сумматор аналоговых сигналов и соединительная муфта, оси чувствительности маятниковых акселерометров сонаправлены, а выходные оси направлены встречно вдоль одной линии, выход устройства управления подключен к управляющему входу коммутатора и к управляющему входу соединительной муфты, служащей для соединения входных сетей маятниковых акселерометров в одну, выход усилителя обратной связи каждого маятникового акселерометра соединен со входом сумматора аналоговых сигналов и через коммутатор соединен со входом датчика момента соответствующего маятникового акселерометра, выход сумматора аналоговых сигналов через коммутатор соединен со входом датчика момента каждого маятникового акселерометра, причем выходы коммутатора являются выходами компенсационного маятникового акселерометра.
Сущность изобретения поясняется фиг. 1, где показана функциональная схема компенсационного маятникового акселерометра.
Компенсационный маятниковый акселерометр (КМА) содержит два маятниковых акселерометра, оси чувствительности которых сонаправлены, а выходные оси направлены встречно вдоль одной линии, которые включают в свой состав датчики угла (ДУ) 1,2; усилители обратной связи (УОС) 5,6; сумматор аналоговых сигналов (САС) 7, датчики моментов (ДМ) 8,9; коммутатор (3х2)10, устройство управления (УУ) 11; соединительную муфту 12.
Входы датчиков угла 1,2 каждого КМА подключены ко входам соответствующего УОС 5,6, выходы которых через коммутатор 10 подключены ко входу обоих датчиков моментов 8,9, а также подключены ко входу САС 7. Выход сумматора через коммутатор 10 подключен ко входам обоих датчиков моментов. Выходы УУ 11, которое предназначено для управления режимами работы схемы, подключены к управляющему входу коммутатора 10,а также к управляющему входу соединительной муфты 12, которая может иметь только два состояния: когда выходные оси акселерометра работают независимо друг от друга и когда они представляют собой единое целое.
Компенсационный маятниковый акселерометр работает следующим образом. Разделим его работу на несколько этапов.
Этап 1. Два спаренных акселерометра работают независимо и их выходными сигналами являются токи, протекающие в обмотках ДМ 8,9 (основной режим работы). При этом сигнал с выхода ДУ 1 поступает, проходя через УОС 5, на вход коммутатора 10, который коммутирует сигналы таким образом (в результате действия управляющих сигналов от УУ 11), что сигнал с выхода УОС 5 поступает на ДМ 8. Точно так же сигнал с выхода ДУ 2 поступает, проходя через УОС 6, на вход коммутатора 10, который коммутирует сигналы таким образом, что сигнал с выхода УОС 6 поступает на ДМ 9. Тогда в соответствии с принципом действия маятникового акселерометра запишем
Mос = Mи,
где
МИ - момент силы инерции, который возникает в результате действия на энерционную массу m кажущегося ускорения известной величины;
Mос - момент, который возникает в цепи обратной связи маятникового акселерометра.
Отсюда
где
i1 - ток в обмотке датчика момента ДМ 1;
k1 - коэффициент усиления УОС 5;
m1 - масса маятника (const) первого акселерометра;
l1 - длина плеча маятника первого акселерометра;
gη - - проекция измеряемого ускорения на ось чувствительности (const);
i01 - ток смещения в цепи обратной связи первого акселерометра.
Тогда для второго маятникового акселерометра
где
i2 - ток в обмотке датчика момента ДМ 2;
k2 - коэффициент усиления УОС 6;
m2 - масса маятника (const) второго акселерометра;
l2 - длина плеча маятника второго акселерометра;
i01 - ток смещения в цепи обратной связи второго акселерометра.
В выражениях (1), (2) -
-
масштабные коэффициенты передачи первого и второго акселерометров.
Этап 2. Обратная связь второго акселерометра разомкнута в результате действия сигнала управления с УУ 11, соединительная муфта 12 включена, в результате чего чувствительные элементы обоих акселерометров работает как единое целое.
Тогда
где
i3 - ток в обмотке ДМ 1.
Этап 3. Обратная связь первого акселерометра разомкнута в результате действия сигнала управления с УУ 11, соединительная муфта 12 включена, в результате чего чувствительные элементы обоих акселерометров также работают как единое целое.
Тогда
где
i4 - ток в обмотке ДМ 2.
Этап 4. Соединительная муфта 12 включена, сигнал с сумматора 7 поступает через коммутатор 10, только на ДМ 1.
где
i5 - ток в обмотке ДМ 1.
Этап 5. Соединительная муфта 12 включена, сигнал с сумматора 7 поступает через коммутатор 10, только на ДМ 2.

где
i6 - ток в обмотке ДМ 2.
Используя измерения 3, 4, 5, 6 этапов получим смещение нулей акселерометров
i01 = i6 - i4, (7)
i02 = i5 - i3, (8)
далее, используя измерения 1, 2 этапов, получим
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОХАСТИЧЕСКИЙ ФИЛЬТР | 1992 |
|
RU2050590C1 |
| УСТРОЙСТВО ДЛЯ СИНТЕЗА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ | 1994 |
|
RU2110086C1 |
| ОПТИЧЕСКИЙ УМНОЖИТЕЛЬ | 1994 |
|
RU2087028C1 |
| ОПТИЧЕСКИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1994 |
|
RU2117323C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО ПАРАБОЛИЧЕСКОГО УРАВНЕНИЯ | 1989 |
|
RU2042179C1 |
| ОПТИЧЕСКИЙ КОМПАРАТОР | 1995 |
|
RU2106064C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| ОПТИЧЕСКИЙ КОМПАРАТОР | 1995 |
|
RU2106063C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ВНЕШНЕЙ КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА ВО ВНУТРЕННЮЮ ОБЛАСТЬ НАБЛЮДЕНИЯ | 1994 |
|
RU2129718C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ В ЧАСТНЫХ ПРОИЗВОДНЫХ | 1991 |
|
RU2042181C1 |
Акселерометр предназначен для использования в инерциальных навигационных системах подвижных объектов. Устройство содержит два маятниковых акселерометра. Оси чувствительности акселерометров сонаправлены, а выходные оси направлены встречно вдоль одной линии. Выход устройства управления подключен к управляющему входу коммутатора, а также к управляющему входу соединительной муфты. Муфта соединяет выходные оси маятниковых акселерометров в одну. Выход усилителя обратной связи каждого маятникового акселерометра подключен через коммутатор ко входу датчика момента соответствующего маятникового акселерометра, а также подключен ко входу сумматора аналоговых сигналов. Выход сумматора через коммутатор подключен ко входу датчика момента каждого маятникового акселерометра. Выходы коммутатора являются выходами устройства. Обеспечивается точная калибровка смещения нуля и масштабного коэффициента. 1 ил.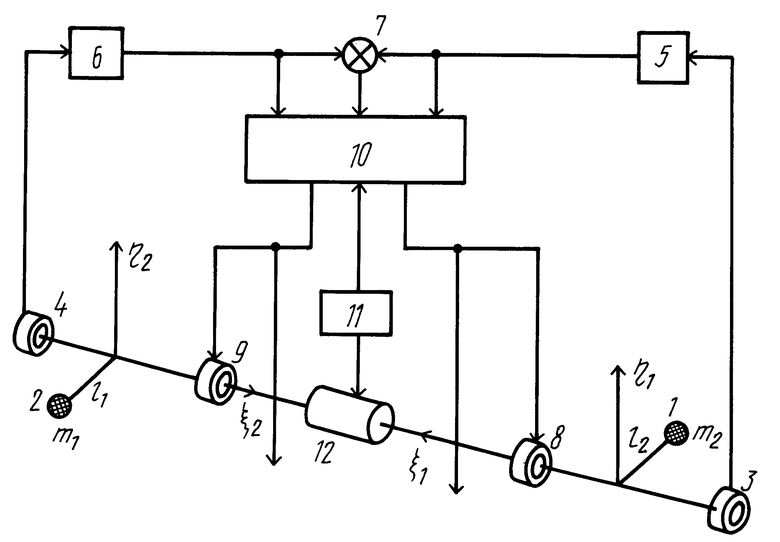
Компенсационный маятниковый акселерометр, содержащий маятниковый акселерометр, включающий маятник, датчик угла, датчик момента, усилитель обратной связи, вход которого соединен с выходом датчика угла, отличающийся тем, что введены второй маятниковый акселерометр, включающий маятник, датчик угла, датчик момента, усилитель обратной связи, вход которого соединен с выходом датчика угла, устройство управления, коммутатор, сумматор аналоговых сигналов и соединительная муфта, оси чувствительности маятниковых акселерометров сонаправлены, а выходные оси направлены встречно вдоль одной линии, выход устройства управления подключен к управляющему входу коммутатора, и к управляющему входу соединительной муфты, служащей для соединения выходных осей маятниковых акселерометров в одну, выход усилителя обратной связи каждого маятникового акселерометра соединен со входом сумматора аналоговых сигналов и через коммутатор соединен со входом датчика момента соответствующего маятникового акселерометра, выход сумматора аналоговых сигналов через коммутатор соединен со входом датчика момента каждого маятникового акселерометра, причем выходы коммутатора являются выходами компенсационного маятникового акселерометра.
| Командно-измерительные приборы./Под ред | |||
| Назарова Б.И | |||
| - М.: Мин | |||
| Обороны СССР, 1975, с.39 | |||
| АКСЕЛЕРОМЕТР | 1989 |
|
RU2046348C1 |
| Литон А | |||
| Выставка инерционных систем на подвижном основании | |||
| - М.: Наука, 1971, с.67 | |||
| US 4932261 A, 12.06.90 | |||
| GB 2052047 A, 21.01.81. | |||
